旋转编码器种类及信号输出形式
编码器三种输出形式.doc
1.旋转编码器的输出形式集电极开路输出、电压输出、互补输出和线性驱动输出之
间的区别是什么?
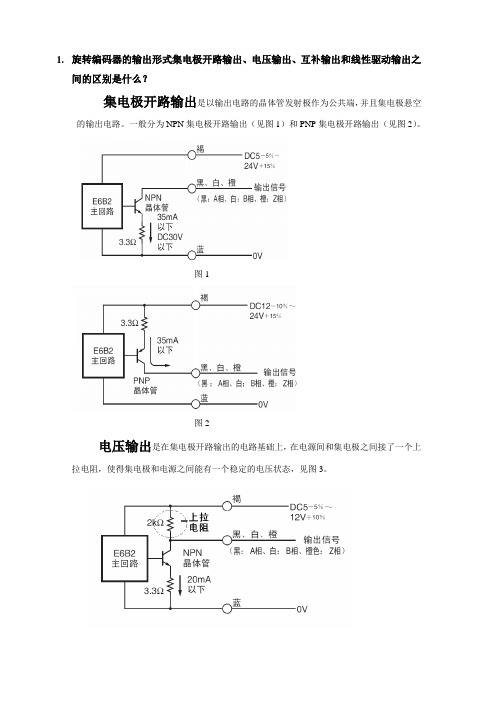
集电极开路输出是以输出电路的晶体管发射极作为公共端,并且集电极悬空的输出电路。
一般分为NPN集电极开路输出(见图1)和PNP集电极开路输出(见图2)。
图1
图2
电压输出是在集电极开路输出的电路基础上,在电源间和集电极之间接了一个上拉电阻,使得集电极和电源之间能有一个稳定的电压状态,见图3。
图3
互补输出(或称推挽输出)
是输出上具备NPN和PNP两种输出晶体管的输出电路。
根据输出信号的[H]、[L],2个输出晶体管交互进行[ON]、[OFF]动作,比集电极开路输出的电路传输距离能稍远,也可与集电极开路输入机器(NPN、PNP)连接。
输出电路见图4。
图4
线性驱动(或称长线驱动、差分驱动)输出
是采用RS-422标准,用AM26LS31芯片应用于高速、长距离数据传输的输出模式。
信号以差分形式输出,因此抗干扰能力更强。
输出信号需专门能接收线性驱动输出的设备才能
接收。
输出电路见图5。
图5。
旋转编码器种类及信号输出形式
旋转编码器种类及信号输出形式
旋转编码器是一种计数器,其功能是使用旋转轴旋转来检测和记录物体的旋转角度或位移距离。
它的编码方式有多种不同的类型,每种类型的输出信号形式也不同。
本文将介绍常见的四种旋转编码器类型,即定子磁极编码器、绝对式编码器、相位型编码器和编码器阵列。
定子磁极编码器是最常见的旋转编码器之一,它是在旋转轴上安装了一组磁极,当旋转轴旋转时,它们会产生电磁强度变化并由传感器检测,从而测量出旋转角度。
它的输出信号一般是四相编码信号,也称为ABZ信号,即A相、B相和Z相的模拟信号,这三个相位的变化是交互的,当旋转轴逆时针旋转时,A相和B相信号会按照特定规律交替变化而不会同时变化,而Z相信号由高电平变成低电平时则表示旋转轴的一个周期循环完成,同时也可以通过A相和B相的变化比例来检测旋转轴的角度变化。
绝对式编码器是一种新型编码器,与定子磁极编码器不同,绝对式编码器使用磁性存储介质来记录旋转角度,它具有比定子磁极编码器更高的精度和更长的工作寿命。
编码器类型以及应用场合
编码器可以分为以下几种类型:
1.增量式编码器:在旋转时,输出的脉冲信号个数与转过的角度成正比,主
要用于测量旋转速度。
2.绝对值编码器:输出的是绝对位置值,即每个位置是唯一的,不存在误差,
适用于需要测量角度、位置、速度等参数的系统。
3.旋转变压器:是一种测量角度的绝对值编码器,测量精度高,抗抖动干扰
能力强,但同时也存在成本高、体积大、结构复杂、可靠性差等缺点。
4.正弦波编码器:输出的是正弦信号,其抗干扰能力比旋转变压器强,但其
精度和稳定性不如前者。
5.霍尔编码器:是一种光电编码器,具有体积小、重量轻、结构简单、可靠
性高、寿命长等优点,但同时也存在精度低、稳定性差等缺点。
编码器的应用场合如下:
1.速度检测:将编码器和电动机同轴联接,通过测量电动机的旋转速度,就
可以得到编码器的脉冲信号个数,从而计算出电动机的旋转速度。
2.位置控制:在生产线上,需要测量物体的位置,可以使用绝对值编码器来
测量物体的位置。
3.运动控制:在自动化设备中,需要精确控制物体的运动轨迹和运动速度,
可以使用编码器来测量物体的运动轨迹和速度。
4.旋转方向检测:在生产线上,需要检测物体的旋转方向,可以使用旋转变
压器来检测物体的旋转方向。
5.速度反馈:在自动化设备中,需要将物体的运动速度反馈到控制器中,可
以使用编码器来测量物体的运动速度并反馈到控制器中。
PLC读取旋转编码器信号
三菱PLC读取旋转编码器信号定义:旋转编码器是用来测量转速的工具,可将输出轴的角位移、角速度等机械量转换成相应的电脉冲以数字量输出,同时旋转编码器可以配合PWM技术实现对速度的调节。
旋转编码器有单路输出、双路输出和三路输出等类型。
单路输出是指旋转编码器的输出是一组脉冲,双路输出的旋转编码器输出两相(A\B)相位差90度的脉冲,通过这两相脉冲不仅可以测量转速,还可以判断旋转的方向。
三路输出和双路输出类似,多一相Z相输出,经常用到就是两相输出。
技术参数:旋转编码器的技术参数主要有:每旋转一圈的脉冲数量,决定着旋转编码器的精度,根据使用要求进行选择;供电电压,因为使用不同的控制器往往能够提供的电压不同,比如单片机一般是能够提供5V电压,而PLC一般会带有一路24V直流电压,所以购买前一定要确定供电电压;增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小;我们一般经常使用的就是增量式旋转编码器;绝对式编码器是每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
PLC要求:按照使用习惯,作者经常使用三菱系列PLC,三菱PLC自带一路24V直流电压,按照经验不推荐将其作为一路电源使用,但是在平时调试的时候,为了接线方便,经常将其给小功率模块供电使用;三菱PLC内部有高速计数器,其中二相双输入高数计数器主要应用在对增量式旋转编码器的输出脉冲计数。
本文选用二相双输入高速计数器C253;(C253高速计数器使用x3端子读取A相输入,使用x4端子读取B相输入,x5端子作为复位输入端)I/O口分配:端子连接图:这次就不绘制端子连接图,直接上图片好啦。
其中四根细线是旋转编码器的输出输入线,红色线接是电源正极,黑色线接电源负极,绿色线是A相输出,白色线是B相输出,黄色线是Z相输出(此次没有接Z相)。
梯形图:梯形图中已经做了注释,其中C253高速计数器的计数范围根据自己需求进行修改就行,这里只是为了测试,随机设置了一个值。
旋转编码器(音量旋钮)原理、ad接键原理
目的和意义
01
了解旋转编码器(音量旋钮)和AD 接键的工作原理有助于更好地理 解电子设备的工作机制,提高设 备的使用和维护效率。
02
掌握这些原理还有助于进行电子 设备的维修和改造,提高设备的 可靠性和稳定性。
02 旋转编码器(音量旋钮)原 理
旋转编码器概述
旋转编码器是一种光电转换装置,通过测量光束在旋转编码器圆盘上的透射和遮 挡,从而检测旋转角度或位置。
旋转编码器由光源、光敏元件、旋转编码盘、光电检测装置等组成,其中旋转编 码盘是关键部分,通常由玻璃、金属或塑料制成,上面刻有黑白相间的条纹。
旋转编码器的工作原理
当旋转编码器随着轴一起转动时,光束通过旋转编码盘上的 黑白条纹,产生交替的透射和遮挡,光敏元件接收到的光线 强度随之变化,从而输出相应的电信号。
我们详细分析了AD接键的工作机制,发现它是通过模拟信号和数字信号之间的转换来实现的。我们深 入研究了其电路设计、信号处理和性能优化等方面,并对其在实际应用中的表现进行了评估。
对未来研究的建议
进一步优化旋转编码器的性能 ,提高其稳定性和可靠性,以 满足更广泛的应用需求。
探索新型的编码器和接键技 术,以适应不断发展的电子 设备和智能化系统的需求。
视频处理
用于将模拟视频信号转换为数字视频 信号,以便进行数字视频处理、编辑 和录制。
04 旋转编码器与AD接键的 比较
工作原理的比较
旋转编码器
旋转编码器是一种旋转式位置传感器, 通过测量旋转角度来输出相应的电信号 。它通常由一个转轴和一个编码器组成 ,转轴与被测物体相连,编码器则将转 轴的旋转角度转换为电信号。
ABCD
对AD接键的电路设计进行改 进,以提高其信号质量和传输 速度,同时降低功耗和成本。
旋变编码器原理
旋变编码器原理一、引言旋变编码器是一种用于测量旋转角度的传感器,它将旋转角度转化为数字信号输出。
在工业自动化控制领域,旋变编码器被广泛应用于机械加工、物流设备、机器人等领域。
本文将详细介绍旋变编码器的原理。
二、基本构成旋变编码器由两部分组成:转动部分和静止部分。
转动部分通常安装在轴上,随着轴的旋转而产生相对运动;静止部分则固定在机架上,不会发生运动。
两个部分之间通过接触或非接触方式进行信号传输。
三、接触式编码器原理1.光电式编码器光电式编码器是一种常见的接触式编码器,它通过光电传感技术进行信号检测。
光电式编码器由一个发光二极管和一个光敏二极管组成,发光二极管将红外线照射到透明圆盘上,透明圆盘上有黑色和白色相间的条纹。
当透明圆盘旋转时,黑白条纹会遮挡或透过光线,光敏二极管会检测到光线的变化,将其转化为电信号输出。
通过计算黑白条纹的数量和旋转方向,可以确定旋转角度。
2.机械式编码器机械式编码器是一种基于接触的编码器,它通过接触方式进行信号检测。
机械式编码器由一个旋转轴和一个固定轴组成,旋转轴上安装有一组金属触点,固定轴上则有一组与之对应的金属触点。
当旋转轴旋转时,金属触点会与对应的金属触点接触或分离,产生开关信号输出。
通过计算开关信号的数量和旋转方向,可以确定旋转角度。
四、非接触式编码器原理1.霍尔式编码器霍尔式编码器是一种常见的非接触式编码器,它通过霍尔传感技术进行信号检测。
霍尔式编码器由一个磁铁和一个霍尔元件组成,磁铁被安装在透明圆盘上,透明圆盘上有黑色和白色相间的条纹;霍尔元件则被安装在静止部分上。
当透明圆盘旋转时,磁铁会带动磁场变化,霍尔元件会检测到磁场的变化,将其转化为电信号输出。
通过计算黑白条纹的数量和旋转方向,可以确定旋转角度。
2.电容式编码器电容式编码器是一种基于非接触的编码器,它通过电容传感技术进行信号检测。
电容式编码器由一个固定板和一个移动板组成,固定板上有一组金属条纹,移动板则被安装在旋转轴上。
工业机器人编码器种类和应用详解!

工业机器人编码器种类和应用详解!一般来说,工业机器人的设计将使用光学和磁性编码器两种编码器。
那么什么是编码器呢?以下是工业机器人编码器的类型和应用程序的详细说明!工业机器人编码器的定义是指监控位置.角度和速度的传感器分为旋转编码器和线性编码器。
旋转编码器分为增量编码器和绝对值编码器(线性编码器分为拉线传感器和非接触式线性传感器),编码器编制信号(如比特流)或数据.转换为可用通信.传输和存储信号形式的设备。
编码器将角位移或直线位移转换为电信号,前者称为码盘,后者称为码尺。
工业机器人编码器分类:根据读取方法,编码器可分为接触式和非接触式;根据工作原理,编码器可分为增量式和绝对式。
增量编码器将位移转换为周期性电信号,然后将电信号转换为计数脉冲,用脉冲数表示位移大小。
绝对编码器的每个位置对应一个确定的数字码,因此其示值仅与测量的开始和结束有关,而与测量的中间过程无关。
工业机器人编码器的分类根据检测原理,编码器可分为光学式.磁式.根据其刻度法和信号输出形式,感应式和电容式可分为增量式.三种绝对式和混合式。
1.增量编码器:增量编码器可以生成位置.角度和转数等信息。
每个转刻线的数量决定了编码器每个转向控制装置传输的脉冲数。
控制装置从参考点计算脉冲数,以确定当前位置。
启动后,该编码器需要操作参考点,以返回参考点,以确定编码器的实际位置。
增量编码器直接利用光电转换原理输出三组方波脉冲A.B和Z相;A.B两组脉冲相位差为90度,便于判断旋转方向,而Z相是每旋转一个脉冲,用于基准点定位。
其优点是原理结构简单,机械平均寿命可达数万小时以上,抗干扰能力强,可靠性高,适用于长途传输。
其缺点是无法输出轴旋转的绝对位置信息。
2.绝对编码器:可生成位置.角度、转数等信息,并计算指定类型的步距。
因此,每个步距角都分配了独特的码型。
每个转弯可用的码型数量决定了分辨率。
每个码型可以形成唯一的参考点,提供绝对的位置信息。
因此,启动后,无需参考点即可测量此类编码器。
编码器输出形式
1 编码器基础1.1光电编码器编码器是传感器的一种,主要用来检测机械运动的速度、位置、角度、距离和计数等,许多马达控制均需配备编码器以供马达控制器作为换相、速度及位置的检出等,应用范围相当广泛。
按照不同的分类方法,编码器可以分为以下几种类型:➢根据检测原理,可分为光学式、磁电式、感应式和电容式。
➢根据输出信号形式,可以分为模拟量编码器、数字量编码器。
➢根据编码器方式,分为增量式编码器、绝对式编码器和混合式编码器。
光电编码器是集光、机、电技术于一体的数字化传感器,主要利用光栅衍射的原理来实现位移——数字变换,通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
典型的光电编码器由码盘、检测光栅、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。
光电编码器具有结构简单、精度高、寿命长等优点,广泛应用于精密定位、速度、长度、加速度、振动等方面。
这里我们主要介绍SIMATIC S7系列高速计数产品普遍支持的增量式编码器和绝对式编码器。
1.2增量式编码器增量式编码器提供了一种对连续位移量离散化、增量化以及位移变化(速度)的传感方法。
增量式编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,它能够产生与位移增量等值的脉冲信号。
增量式编码器测量的是相对于某个基准点的相对位置增量,而不能够直接检测出绝对位置信息。
如图1-1所示,增量式编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成。
在码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周期。
检测光栅上刻有A、B两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检测器件之间的光线,它们的节距和码盘上的节距相等,并且两组透光缝隙错开1/4节距,使得光电检测器件输出的信号在相位上相差90°。
当码盘随着被测转轴转动时,检测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件就输出两组相位相差90°的近似于正弦波的电信号,电信号经过转换电路的信号处理,就可以得到被测轴的转角或速度信息。