精密机械设计基础第5章习题答案
机设习题答案(第5章)
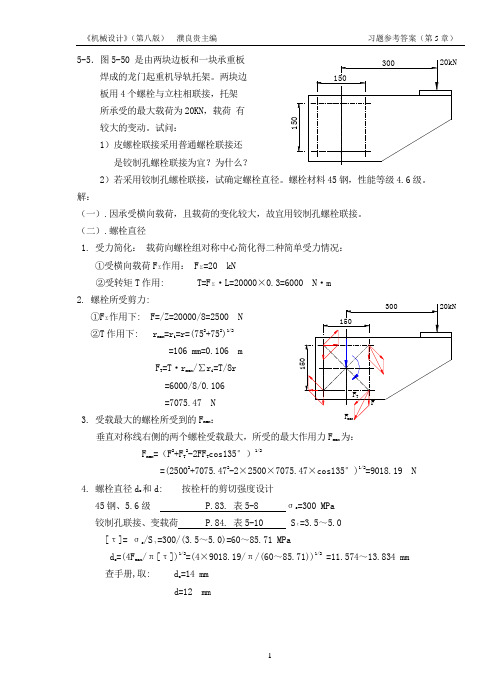
11. 受力简化: 载荷向螺栓组对称中心简化得二种简单受力情况: ①受横向载荷F Σ作用: F Σ=20 kN②受转矩T 作用: T=F Σ·2. 螺栓所受剪力:①F Σ作用下: F=/Z=20000/8=2500 N ②T 作用下: r max =r i =r=(752+752)1/2=106 mm=0.106 mF T =T ·r max /∑r i =T/8r =6000/8/0.106 =7075.47 N 3. 受载最大的螺栓所受到的F max :F max =(F 2+F T 2-2FF T cos135 =(25002+7075.472-2×4. 螺栓直径d o 和d: 按栓杆的剪切强度设计45钢、5.6级 P.83. 表5-8 σs =300 MPa 铰制孔联接、变载荷 P.84. 表5-10 S τ=3.5~5.0 [τ]= σs /S τ=300/(3.5~5.0)=60~85.71 MPad o =(4F max /π[τ])1/2=(4×9018.19/π/(60~85.71))1/2=11.574~13.834 mm 查手册,取: d o =14 mm d=12 mm《机械设计》(第八版)濮良贵主编习题参考答案(第5章)5-7.图5-52所示为一拉杆螺纹联接。
已知拉杆所受的载荷F=56KN,载荷稳定,拉杆材料为Q235钢,试设计此联接。
(属松联接,材料性能等级取4.6级)解:1.螺栓的性能等级:属一般联接,取4.6级2.屈服极限σs: Q235(属中碳钢),4.6级别 P.84.表5-9 σs=240 Mpa3. 安全系数S: 松螺栓联接 P.84.表5-10 S=1.2~1.74. 许用应力[σ]: [σ]=σs/S=240/(1.2~1.7)=141.18~200 MPa5. 螺纹小径d1: d1=(4F/π[σ])1/2=18.88~22.47mm6. 公称直径d: 按GB196-81,取d=24mm的粗牙普通螺纹,即M245-9、受轴向载荷的紧螺栓联接,被联接钢板间采用橡胶垫片。
精密机械设计基础习题答案(裘祖荣)
第一章 结构设计中的静力学平衡1-1 解:力和力偶不能合成;力偶也不可以用力来平衡。
1-2 解:平面汇交力系可以列出两个方程,解出两个未知数。
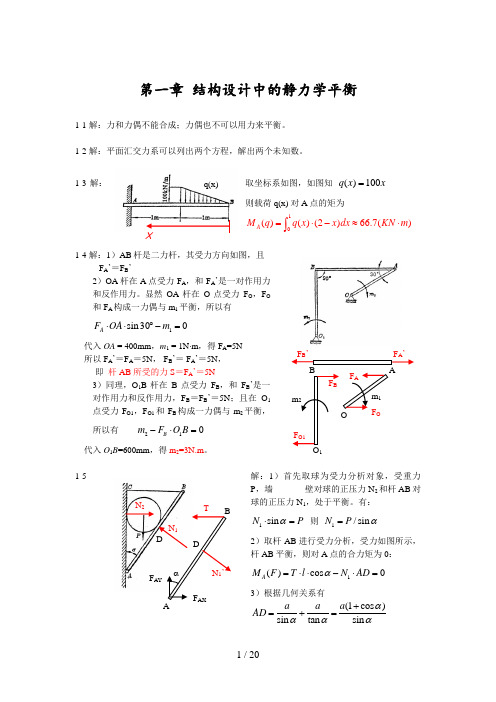
取坐标系如图,如图知 ()100q x x = 1-3 解:则载荷q(x) 对A 点的矩为1()()(2)66.7()A M q q x x dx KN m =⋅-≈⋅⎰1-4 解:1)AB 杆是二力杆,其受力方向如图,且 F A ’=F B ’2)OA 杆在A 点受力F A ,和F A ’是一对作用力和反作用力。
显然OA 杆在O 点受力F O ,F O 和F A 构成一力偶与m 1平衡,所以有 1sin 300A F OA m ⋅⋅︒-=代入OA = 400mm ,m 1 = 1N ⋅m ,得 F A =5N 所以F A ’=F A =5N , F B ’= F A ’=5N ,即 杆AB 所受的力S =F A ’=5N3)同理,O 1B 杆在B 点受力F B ,和F B ’是一对作用力和反作用力,F B =F B ’=5N ;且在O 1点受力F O1,F O1和F B 构成一力偶与m 2平衡,所以有 210B m F O B -⋅= 代入O 1B =600mm ,得 m 2=3N.m 。
解:1)首先取球为受力分析对象,受重力1-5P ,墙 壁对球的正压力N 2和杆AB 对球的正压力N 1,处于平衡。
有:1sin N P α⋅= 则 1/sin N P α=2)取杆AB 进行受力分析,受力如图所示,杆AB 平衡,则对A 点的合力矩为0:1()cos 0A M F T l N AD α=⋅⋅-⋅=3)根据几何关系有(1cos )sin tan sin a a a AD αααα+=+=Xq(x)F B ’ ABF A ’ F Am 1 OFm 21F BF O1N 1 N 2A D N 1’TαBD F AYF AX最后解得:2211/cos 1sin cos cos Pa Pa T l l αααα+=⋅=⋅- 当2cos cos αα-最大,即α=60°时,有T min =4Pa l。
精密机械设计基础第5章习题答案
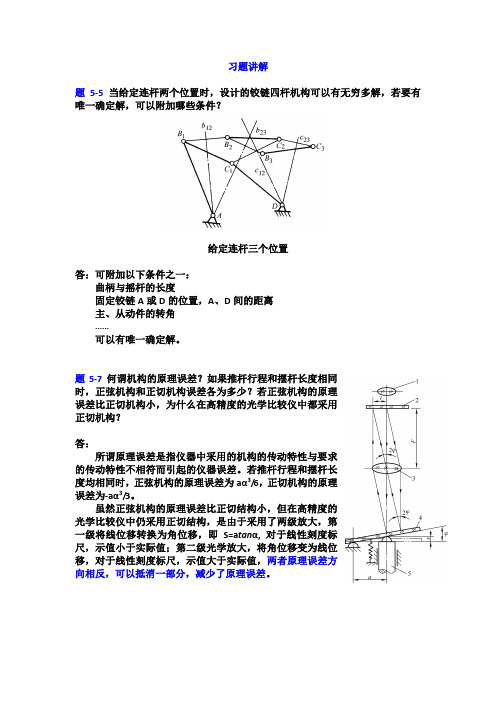
习题讲解题5-5 当给定连杆两个位置时,设计的铰链四杆机构可以有无穷多解,若要有唯一确定解,可以附加哪些条件?给定连杆三个位置答:可附加以下条件之一:曲柄与摇杆的长度固定铰链A或D的位置,A、D间的距离主、从动件的转角……可以有唯一确定解。
题5-7何谓机构的原理误差?如果推杆行程和摆杆长度相同时,正弦机构和正切机构误差各为多少?若正弦机构的原理误差比正切机构小,为什么在高精度的光学比较仪中都采用正切机构?答:所谓原理误差是指仪器中采用的机构的传动特性与要求的传动特性不相符而引起的仪器误差。
若推杆行程和摆杆长度均相同时,正弦机构的原理误差为aα3/6,正切机构的原理误差为-aα3/3。
虽然正弦机构的原理误差比正切结构小,但在高精度的光学比较仪中仍采用正切结构,是由于采用了两级放大,第一级将线位移转换为角位移,即S=a tanα, 对于线性刻度标尺,示值小于实际值;第二级光学放大,将角位移变为线位移,对于线性刻度标尺,示值大于实际值,两者原理误差方向相反,可以抵消一部分,减少了原理误差。
题5-8 图5-40所示铰链四杆机构中,已知L BC=50mm,L CD=35mm,L AD=30mm,AD为机架。
问:1)若此机构为曲柄摇杆机构,且AB为曲柄,求L AB的最大值。
2)若此机构为双曲柄机构,求L AB的最小值。
3)若机构为双摇杆机构,求L AB的值(取值范围)。
解:1)当此机构为曲柄摇杆机构,且AB为曲柄时,由曲柄存在的必要条件(杆长条件),有:L AB + L BC ≤L CD + L AD即L AB +50 ≤35+30L AB≤15mm∴L AB的最大值为15mm。
2)当此机构为双曲柄机构时,应有:机架AD为最短杆且L AD + L BC≤L CD + L AB即30+50≤L AB +35L AB≥45mm∴L AB的最小值为45mm。
3)若机构为双摇杆机构,则有以下三种情况:(1)AB为最短杆,即L AB≤30mm不存在曲柄,即无法满足曲柄存在的必要条件,有:L AB + 50 > 35 + 30,L AB > 15mm∴15mm< L AB≤30mm(2)AB为最长杆,即L AB > 50mm,此时AD为最短杆则30 + L AB > 50 + 35,L AB > 55mm又Θ∠AB的值不应大于其余三杆长度之和∴55mm< L AB <115mm(3)AB既不是最短杆,也不是最长杆。
机械制造技术基础第五章 习题及答案(机械制造质量分析与控制)

《机械制造质量分析与控制》习题一.单项选择题1.机床和刀具达到热平衡前的热变形所引起的加工误差属于:()a、常值系统误差b、形位误差c、随机误差d、变值系统误差2. 某工序的加工尺寸为正态分布,但分布中心与公差中点不重合,则可以认为:()a、无随机误差b、无常值系统误差c、变值系统误差很大d、同时存在常值系统误差和随机误差3. 夹具在机床上的安装误差所引起的加工误差属于:()a、常值系统误差b、变值系统误差c、随机误差d、形位误差4. 一次性调整误差所引起的加工误差属于:()a、随机误差b、常值系统误差c、变值系统误差d、形位误差5. 误差复映所引起的加工误差属于:()a、变值系统误差b、常值系统误差c、随机误差d、形位误差6. 刀具磨损所引起的加工误差属于:()a、常值系统误差b、变值系统误差c、随机误差d、形位误差7. 内应力引起的变形误差属于:()a、常值系统误差b、形位误差c、变值系统误差d、随机误差8. 定位误差所引起的加工误差属于:()a、常值系统误差b、随机误差c、变值系统误差d、形位误差9. 对滚动轴承进行适当的预紧,是提高主轴系统()的重要措施。
()a、精度b、强度c、刚度d、柔度10.通常用()系数表示某种加工方法和加工设备胜任零件所要求加工精度的程度()a、工艺能力b、误差复映c、误差传递d、误差敏感11.原理误差所引起的加工误差属于:()a、常值系统误差b、随机误差c、形位误差d、变值系统误差12.误差的敏感方向指产生加工误差的工艺系统的原始误差处于加工表面的:()a、切线方向b、轴线方向c、法线方向d、倾斜方向13. 受迫振动系统在共振区消振最有效的措施是()。
a、增大系统刚度b、增大系统阻尼c、增大系统质量14. 在车床上进行削扁镗杆自激振动的切削实验时,若切削条件相同 , 试指出下列各种情况下切削最稳定的场合()a、弱刚度主轴与加工表面法向的夹角450b、弱刚度主轴与加工表面法向的夹角1350c、采用直径相同的圆镗杆d、增大阻尼15. 削扁镗杆的抗振性比圆镗杆好是由于:()a、刚度高b、阻尼大、消耗振动能量大c、系统刚度的组合特性合适二.多项选择题1.用调整法在车床三爪卡盘上精镗一批薄壁铜套的内孔,各种因素引起的加工误差是属于常值系统误差的是:()a、三爪卡盘的制造和安装误差b、车床主轴的径向跳动c、薄壁铜套的夹紧变形d、机床导轨的几何误差e、镗刀的磨损2.指出下列哪些情况产生的误差属于加工原理误差:()a、加工丝杠时机床丝杠螺距有误差b、用模数铣刀加工渐开线齿轮c、工件残余应力引起的变形d、用阿基米德滚刀加工渐开线齿轮e、夹具在机床上的安装误差3.机械加工中达到尺寸精度的方法有:()a、试切法b、定尺寸刀具法c、调整法d、选配法e、自动控制法4.用调整法在车床三爪卡盘上精镗一批薄壁铜套的内孔,各种因素引起的加工误差是属于随机误差的是:()a、镗刀的磨损b、薄壁铜套的夹紧变形c、三爪卡盘的制造和安装误差d、机床导轨的几何误差e、工件外圆形状误差引起的安装误差5. 指出下列哪些刀具的制造误差会直接影响加工精度:()a、外圆车刀b、齿轮滚刀c、端面车刀d、铰刀e、键槽铣刀6.主轴的纯轴向窜动对哪些加工有影响: ()a、车削螺纹b、车削外圆c、车削端面d、车削内孔7.影响加工精度的主要误差因素可归纳为以下方面:()a、工艺系统的几何误差b、毛坯的制造误差c、工艺系统力效应产生的误差d、工艺系统热变形产生的误差e、加工原理误差8.机械加工中获得工件形状精度的方法有:()a、试切法b、轨迹法c、调整法d、成形法e、展成法三.判断题1.零件表面层的加工硬化能减小表面的弹塑性变形,从而提高了耐磨性,所以表面硬化程度越高越耐磨。
机械设计基础第五章答案
五、联接5-1 判断题(1)× (2)√ (3)√ (4)× (5)√ (6)√ (7)×(8)× (9)× (10)× (11)× (12)√ (13)× (14)×(15)× (16)× (17)√ (18)× (19)× (20)√ 5-2 填空题(1)牙型 (2)大 (3)越高 (4)自锁性 (5)4 (6)螺钉 (7)拧紧力矩 (8)防松 (9)一致 (10)摩擦 (11)直线 (12)梯形 (13)传力,传导,调整 (14)右 (15)轴和毂,挤压 (16)轴的直径,轴头 (17)A ,B ,C ,C (18)增加键的长度 (19)B (20)80 5-3 选择题(1)B (2)A (3)A (4)C (5)D (6)C (7)B(8)A (9)A (10)D (11)B (12)A (13)B (14)B(15)C (16)A (17)B (18)A (19)A (20)B (21)A(22)B (23)A (24)B (25)C (26)B (27)D (28)B(29)C (30)A (31)A (32)A (33)A (34)D (35)A(36)A (37)A (38)A (39)A (40)A (41)A (42)B(43)A (44)D (45)A 5-4 解:该螺栓连接为松螺栓连接,其强度条件为:[]214Fσσπd =≤ 拉杆材料为Q235,其235M P s σ=,取安全系数S =1.7,则:[]235138.24MPa 1.7s σσS === 则:114.56mm d = 查教材表5-2可知,选小径d 1=17.294mm ,公称直径d =20mm 的粗牙普通螺纹。
答:拉杆螺纹的直径为M20。
5-5 解:该螺栓连接为受横向工作载荷的紧螺栓连接,其强度条件为:[]215.2ae F σσπd =≤0Ra CF F F zmf=≥,查教材表5-2可知,M16的螺栓的小径d 1=13.835mm 。
精密机械设计第五章课后答案

5.1铰链四杆机构的基本型式有哪几种?曲柄摇杆机构,传动特点:曲柄整周转动,摇杆往复摆动。
双曲柄机构,传动特点:主动曲柄连续等速转动,从动曲柄一般不等速转动。
双摇杆机构,传动特点:两连架杆均作往复摆动。
5.2铰链四杆机构可以通过哪几种方式演化为其他型式的四杆机构?①改变构件的形状和相对尺寸②改变运动副的尺寸③选用不同构件作为机架。
5.3铰链四杆机构曲柄存在的条件是什么?①最短杆为机架或连架杆②最短杆与最长杆的长度之和小于或等于其余两杆长度之和。
5.4何谓四杆机构的压力角和传动角?压力角:四杆机构中,从动杆上受力点所受力的方向与改点速度方向之间的夹角。
传动角:连杆与从动杆轴线之间所夹得锐角。
5.5铰链四杆机构中有可能产生死点位置的机构有哪些?他们发生死点的位置条件是什么?曲柄摇杆机构,若以摇杆为主动件,当连杆与曲柄处于共线位置时产生死点。
曲柄滑块机构:以滑块为主动件时,传动角为零时产生死点。
平行四边形机构:曲柄与连杆共线。
传动角为零,产生死点。
5.6 当给定连杆两个位置时,设计的铰链四杆机构可以有无穷多,若要有唯一确定解。
可以附加哪些条件?给定连杆两个位置,附加条件:最小传动角,曲柄或摇杆长度,固定铰链中心A、D的位置范围要求,主从动件的转角。
5.7写出正弦机构和正切机构的传动特性式和传动表达式;从结构上如何区别正弦机构和正切机构?正弦机构:S=asinΦ正切机构:S=atanΦ区别:正弦机构推杆的工作面为一个面,摆杆的工作面为一球面。
正切机构则相反,推杆工作面是一球面,摆杆工作面为一平面。
5.8何谓机构的原理误差?原理误差:仪器中采用机构的传动特性与要求传动特性不相符而引起的仪器误差。
5.9图5-40所示铰链四杆中,已知BC=50mm,CD=35mm,AD=30mm,AD为计架。
问:⑴若此机构为曲柄摇杆机构,且AB为曲柄,求AB的最大值。
⑵若此机构为双曲柄机构,求AB的最小值。
⑶若机构为双摇杆机构,求AB的值。
机械制图第五章部分答案
判别可见性,连线
16
P33 5-5(3)作 出组合回转体截交 线的正面投影。
17
P34 5-6(1)作 出组合回转体截交 线的正面投影。
18
P34 5-6(2) 完成球体被水平 面P、两个侧平 面Q和两个侧垂 面S截切后的三 面投影。
19
5
P30 5-2(2)作出1/4环体的水平投影,以及它表面上A、B、C点的三面投影
(a)’ c’
b’
(a) ’’
c’’
b’’
a
(b) (c)
6
b’’
c’’
(b’) a’
P30 5-2(3)作出
组合回转体的水平
投影,以及它表面
c’
上A、B、C点的三
c
面投影
a’’
b
单击此处输入你的正文
7
P31 5-3 (1) 已
11
P32 5-4(3)完成圆柱体 被截后的三面投影。
12
P32 5-4(4)完成圆锥体 被截后的三面投影。
13
P32 5-4(4)完成球体体 被截后的三面投影。
14
P33 5-5(2)作出正平面P与 圆环截交线的正面投影。
15
平面与圆环相交 作图步骤:
特殊位置点: 水平面转向线上的点 最高点、最低点 中间点
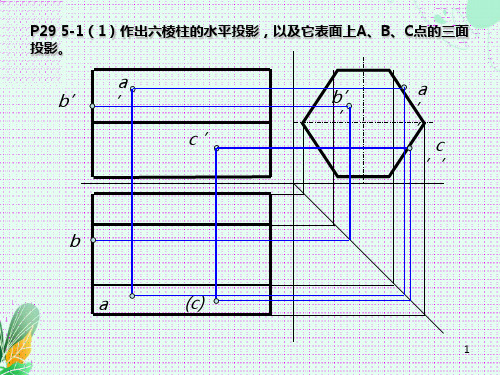
P29 5-1(1)作出六棱柱的水平投影,以及它表面上A、B、C点的三面 投影。
a b’ ’
c’
b’ ’
a ’ ’
c
’’
b
a
(c)
1
CONTENTS
目录
(a’)
c’
a
大学_精密机械设计(庞振基黄其圣著)课后答案

精密机械设计(庞振基黄其圣著)课后答案精密机械设计(庞振基黄其圣著)内容简介前言基本物理量符号表绪论第一章精密机械设计的基础知识第一节概述第二节零件的工作能力及其计算第三节零件与机构的误差估算和精度第四节工艺性第五节标准化、系列化、通用化第六节零件的设计方法及其发展思考题及习题第二章工程材料和热处理第一节概述第二节金属材料的力学性能第三节常用的工程材料第四节钢的热处理第五节表面精饰第六节材料的选用原则思考题及习题第三章零件的几何精度第一节概述第二节极限与配合的基本术语和定义第三节光滑圆柱件的极限与配合及其选择第四节形状与位置公差及其选择第五节表面粗糙度及其选择思考题及习题第四章平面机构的结构分析第一节概述第二节运动副及其分类第三节平面机构的运动简图第四节平面机构的自由度第五节平面机构的组成原理和结构分析思考题及习题第五章平面连杆机构第一节概述第二节铰链四杆机构的基本型式及其演化第三节平面四杆机构曲柄存在的条件和几个基本概念第四节平面四杆机构的设计思考题及习题第六章凸轮机构第一节概述第二节从动件常用运动规律第三节图解法设计平面凸轮轮廓第四节解析法设计平面凸轮轮廓第五节凸轮机构基本尺寸的确定思考题及习题第七章摩擦轮传动和带传动第一节概述第二节磨擦轮传动第三节磨擦无级变速器第四节带传动第五节同步带传动第六节其它带传动简介思考题及习题第八章齿轮传动第一节概述第二节齿廓啮合基本定律第三节渐开线齿廓曲线第四节渐开线齿轮各部分的名称、符号和几何尺寸的计算第五节渐开线直齿圆柱齿轮传动第六节渐开线齿廓的切制原理、根切和最少齿数第七节变位齿轮第八节斜齿圆柱齿轮传动第九节齿轮传动的失效形式和材料第十节圆柱齿轮传动的强度计算第十一节圆锥齿轮传动第十二节蜗杆传动第十三节轮系第十四节齿轮传动精度第十五节齿轮传动的空回第十六节齿轮传动链的设计思考题及习题第九章螺旋传动第一节概述第二节滑动螺旋传动第三节滚珠螺旋传动第四节静压螺旋传动简介思考题及习题第十章轴、联轴器、离合器第一节概述第二节轴第三节联轴器第四节离合器思考题及习题第十一章支承第一节概述第二节滑动摩擦支承第三节滚动摩擦支承第四节弹性摩擦支承第五节流体摩擦支承及其它形式支承第六节精密轴承思考题及习题第十二章直线运动导轨第一节概述第二节滑动摩擦导轨第三节滚动摩擦导轨第四节弹性摩擦导轨第五节静压导轨简介思考题及习题第十三章弹性元件第一节概述第二节弹性元件的基本特性第三节螺旋弹簧第四节游丝第五节片簧第六节热双金属弹簧第七节其它弹性元件简介思考题及习题第十四章联接第一节概述第二节机械零件的联接第三节机械零件与光学零件的联接思考题及习题第十五章仪器常用装置第一节概述第二节微动装置第三节锁紧装置第四节示数装置第五节隔振器思考题及习题第十六章机械的计算机辅助设计第一节概述第二节计算机辅助设计系统的原理与构成第三节表格和线图的处理第四节机械优化设计第五节设计举例思考题及习题参考文献精密机械设计(庞振基黄其圣著)目录本书对精密机械及仪器仪表中常用机构和零部件的工作原理、适用范围、结构、设计计算方法,以及工程材料、零件几何精度的基础知识等诸方面均作了较为详细的阐述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题讲解
题5-5 当给定连杆两个位置时,设计的铰链四杆机构可以有无穷多解,若要有唯一确定解,可以附加哪些条件?
给定连杆三个位置
答:可附加以下条件之一:
曲柄与摇杆的长度
固定铰链A或D的位置,A、D间的距离
主、从动件的转角
……
可以有唯一确定解。
题5-7何谓机构的原理误差?如果推杆行程和摆杆长度相同
时,正弦机构和正切机构误差各为多少?若正弦机构的原理
误差比正切机构小,为什么在高精度的光学比较仪中都采用
正切机构?
答:
所谓原理误差是指仪器中采用的机构的传动特性与要求
的传动特性不相符而引起的仪器误差。
若推杆行程和摆杆长
度均相同时,正弦机构的原理误差为aα3/6,正切机构的原理
误差为-aα3/3。
虽然正弦机构的原理误差比正切结构小,但在高精度的光学比较仪中仍采用正切结构,是由于采用了两级放大,第一级将线位移转换为角位移,即S=a tanα, 对于线性刻度标尺,示值小于实际值;第二级光学放大,将角位移变为线位移,对于线性刻度标尺,示值大于实际值,两者原理误差方向相反,可以抵消一部分,减少了原理误差。
题5-8 图5-40所示铰链四杆机构中,已知L BC=50mm,L CD=35mm,L AD=30mm,AD为机架。
问:
1)若此机构为曲柄摇杆机构,且AB为曲柄,求L AB的最大值。
2)若此机构为双曲柄机构,求L AB的最小值。
3)若机构为双摇杆机构,求L AB的值(取值范围)。
解:
1)当此机构为曲柄摇杆机构,且AB为曲柄时,由曲柄
存在的必要条件(杆长条件),有:
L AB + L BC ≤L CD + L AD
即L AB +50 ≤35+30
L AB≤15mm
∴L AB的最大值为15mm。
2)当此机构为双曲柄机构时,应有:
机架AD为最短杆
且L AD + L BC≤L CD + L AB
即30+50≤L AB +35
L AB≥45mm
∴L AB的最小值为45mm。
3)若机构为双摇杆机构,则有以下三种情况:
(1)AB为最短杆,即L AB≤30mm
不存在曲柄,即无法满足曲柄存在的必要条件,有:
L AB + 50 > 35 + 30,L AB > 15mm
∴15mm< L AB≤30mm
(2)AB为最长杆,即L AB > 50mm,此时AD为最短杆
则30 + L AB > 50 + 35,L AB > 55mm
又 ∠AB的值不应大于其余三杆长度之和
∴55mm< L AB <115mm
(3)AB既不是最短杆,也不是最长杆。
此时AD为最短杆,BC为最长杆,则
30+50 > L AB +35,L AB <45mm
∴30mm≤L AB <45mm
掌握曲柄存在条件
题5-9若已知铰链四杆机构的两个杆长为a=9mm,b=11mm,另外两个杆的长度之和c+d=25mm,要求构成一曲柄摇杆机构,c、d的长度(取整数)应为多少?
解:
因为c+d=25mm,则c或d必大于b(11mm),故c、d 中必有一最长杆。
若c、d 中有一最短杆:
则c+d = 25 > a + b = 20mm,不满足曲柄存在必要条件,因此最短杆必然不是c或d,只能是a杆。
则1)c为最长杆:
a + c ≤ b + d (1)
c + d = 25 (2)
由(1)(2),且c、d的长度为整数,得c=13mm,d=12mm
2)d为最长杆:
a + d ≤ b + c (1)
c + d = 25 (2)
由(1)(2),且c、d的长度为整数,得c=12mm,d=13mm
题5-10图5-41所示曲柄摇杆机构中,已知机架长
L AD=500mm,摇杆L CD=250mm,要求摇杆CD能在水平
位置上、下各摆10o,试确定曲柄与连杆的长度。
解:
当摇杆摆到水平以上10°时,曲
柄、连杆共线,如B ’AC ’,由ΔADC ´得
()()︒
⋅∠⋅∠-∠+∠=∠-∠︒
⋅∠⋅∠-∠+∠=-∠∠80cos '280cos '2''''2
22222DC AD DC AD AB BC DC AD DC AD AB C B 即 又当摆杆DC 摆到水平以下10°时,曲柄与连杆也共线,如AB ´´C ´´,由ΔADC ´´得
()()︒⋅∠⋅∠-∠+∠=∠+∠︒
⋅∠⋅∠-∠+∠=+∠∠100cos 2100cos ''2''''''''222
222DC AD DC AD AB BC DC AD DC AD C B AB 即代入数字:
()︒⨯⨯⨯-+=∠-∠80cos 2505002250500222AB BC (1)
()︒⨯⨯⨯-+=∠+∠100cos 25050022505002
22
AB BC (2)
解 (1)(2)式得 ∠AB=38.93mm ,∠BC=557.66mm 题5-11 设计一铰链四杆机构,如图5-42所示,已知其摇杆CD 的长度L CD =75mm ,机架AD 的长度L AD =100mm ,行程速度变化系数K =1.5,摇杆的一个极限位置与机架的夹角
'345ψ=︒,求曲柄AB 及连杆BC 的长度。
解:
(1)求极位夹角
︒=+-⨯︒=+-︒=361
5.11
5.118011180k k θ
(2)连接 AC,并延长至 B 1,在此位置,曲柄与连杆共线; (3)过A 点作一线AB 1´与AC 夹角为36º;
(4)以D 为圆心DC 长为半径画弧,延长线AB 1´并与圆弧交于C 1´点,则C ´D 为摇杆的第二极限位置,AC 1´为连杆与曲柄共线的第二位置。
由图看出,此题有两个解,因圆弧与线AC 1´由第二交点C 2´. 第一组解:由ΔADC 得
()2
112245cos 2AB C B DC AD DC AD -=︒⋅⋅-+
即 ()2
112245cos 2AB C B DC AD DC AD ∠-∠=︒⋅∠⋅∠-∠+∠
()2
112245cos 75100275100AB C B ∠-∠=︒⋅⨯⨯-+
mm AB C B 7111=∠-∠ (1)
由正弦定理得 ︒
=∠︒=∠∠=
∠∠=︒1248sin 15
sin 45sin 711AD C CAD CAD CAD DC ‘
即
又 ︒
=∠︒=∠∠=
∠∠=︒∠15216sin 100
sin 12sin '1'1'1'1'1ADC D AC D AC D AC AD DC 即得
由ΔAC 1´D 得(
)
2
'1'
1'1'12
'12152cos 2AB C B DC AD DC AD ∠+∠=︒⋅∠⋅∠-∠+∠
()()mm
AB C B AB C B 1698829.075100275100112
1122=∠+∠∠+∠=-⨯⨯⨯-+ (2)
解 (1)(2)式 得 ∠B 1C=120mm ……连杆长,∠AB 1=49mm …… 曲柄长 第二组解: 由ΔADC 2´
(
)
2
'2'
22222'cos 2AB C B C AD DC AD DC AD ∠-∠=∠⋅∠⋅∠-∠+∠ (3)
()2
222245cos 2AB C B DC AD DC AD ∠+∠=︒⋅∠⋅∠-∠+∠ (4)
用正弦定理可求∠AD 2C 2´
由(3)(4)式求得 ∠B 2C=48.5mm ,∠AB 2=22.5mm
题5-13 设计偏置曲柄滑块机构,已知滑块C 的行程速度变化系数K =1.5,滑块C 的行程C 1C 2=40mm ,滑块在C 1处的压力角α=45o 。
解:若曲柄滑块机构处于极限位置,如下图所示:
C 2。