运控交流(三)
PC运动控制板卡的交流伺服控制系统
控制模块
电位插刀误速G 监中P
机置补补差度功控断L
运运计计补处能处处C
动动算算偿理处理理处
控控
理
理
制制
2 PMAC运动控制器
PMAC-Programmable
Multi-Axis
Controller是可编程多轴运动控制器,也称运动控
制计算机.
它 主 要 由 MOTOROLA DSP CPU 与 DELTA
2 基于运动控制器的数控系统(功能概图)
计算机
PCI总线
运动控制器 基本模块
数控系统 (运动控制器)
开关量 I/O
其它I/O
伺服辅助控制信号
I/O模块
运动控制 指令
伺服 驱动器
位置反馈
主轴 驱动器
伺服电机
2 基于运动控制器的数控系统(PCI总线)
2 基于运动控制器的数控系统(软件系统)
数控装置
➢I/O扩展端口
➢64位位置计数范围
➢越程极限,回原点,伺服放大 ➢位置环,速度环,电流环三环
器报警,使能标志信号接口
矢量控制能力
➢LCD和VFD显示端口
➢曲线加减速控制
➢Bus and/or RS-422通信
➢自定义伺服算法能力
➢脱机运行
➢电子齿轮
➢G-Code 编程(可自定义)
➢先进的PID及扩展伺服算法
Ix20
7)通过设置 I变量可以控制以下典型 P.I.D 伺服环
Following
Error 跟随误差
Commanded
Actual
- = Position
Position
指令位置
实际位置
Com m and+
运动控制实验报告

运动控制实验报告篇一:运动控制实验报告“运动控制系统”专题实验报告篇二:运动控制系统实验报告运动控制系统实验报告姓名:杜文划学号:912058XX02同组人:杜文坚,周文活,黎霸俊异步电动机SPWM与电压空间矢量变频调速系统一、实验目的1. 通过实验掌握异步电动机变压变频调速系统的组成与工作原理。
2. 加深理解用单片机通过软件生成SPWM波形的工作原理特点。
以及不同不同调制方式对系统性能的影响。
3. 熟悉电压空间矢量控制的原理与特点。
4. 掌握异步电动机变压变频调速系统的调试方法。
二、实验过程一、采用SPWM方式调制1. 同步调制30HZ下电机气隙磁通分量波形如下示:电机气隙磁通轨迹如下:定子电流波形如下示: IGBT两端波形如下示:定子端电压波形如下示:50HZ下电机气隙磁通分量波形如下示:电机气隙磁通轨迹如下:定子电流波形如下示: IGBT两端波形如下示:定子端电压波形如下示:波形分析:电机气隙磁通两相绕组之间相差约60°。
电机磁通轨迹50Hz时更接近圆形。
对定子电流:30Hz时和50Hz时呈正弦波,但其中有很多的高频分量。
IGBT的疏密程度反映了脉冲宽度调制的过程,越密表示频率越高。
定子电压呈正弦分布。
同步调制方式在50Hz比较好。
2、异步调制30HZ下电机气隙磁通分量波形如下示:电机气隙磁通轨迹如下:定子电流波形如下示:IGBT两端波形如下示:定子端电压波形如下示:50HZ下电机气隙磁通分量波形如下示:电机气隙磁通轨迹如下:定子电流波形如下示: IGBT两端波形如下示:定子端电压波形如下示:异步调制与同步调制想比,气隙磁通分量更接近正弦波,气隙磁通轨迹更接近圆形,此时30Hz比50Hz效果好些。
3、混合调制混合调制在不同的输出频率段采用不同的载波比10HZ下,载波比为100电机气隙磁通分量波形如下示:电机气隙磁通轨迹下:篇三:运动控制实验报告运动控制系统实验报告姓名刘炜原学号 XX03080414实验一晶闸管直流调速系统电流-转速调节器调试一.实验目的1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。
活性污泥法用于污水处理(三)——运行控制方法

活性污泥法用于污水处理(三)——运行控制方法运行控制方法活性污泥法的控制方法有污泥负荷法、SV法、MLSS法和泥龄法等四种,这些方法之间是相互关联、而不是对立的,往往同时使用,互相校核,以期达到最佳的处理效果。
1污泥负荷法污泥负荷法是污水生物处理系统的主要控制方法,尤其适用于系统运行的初期和水质水量变化较大的生物处理系统。
但此法操作复杂,水质水量波动较小的稳定运行城市污水处理厂一般采用其他控制方法,只是定期用污泥负荷法进行核算。
问:什么是污泥负荷?什么是容积负荷?两者有什么联系?答:污泥负荷是指曝气池内单位重量的活性污泥在单位时间内承受的有机质的数量,容积负荷是指单位有效曝气体积在单位时间内承受的有机质的数量,活性污泥微生物要想进行正常的生理活动,首先要求其周围环境中含有足够的BOD5,在有氧的条件下,将其中一部分有机物分解代谢成二氧化碳和水等稳定物质,同时自身得到增殖。
如果污泥负荷和容积负荷过低,虽然可以有效降低污水中的有机物含量,但同时会使活性污泥处于过氧化状态、沉降性能也会变差,导致出水悬浮物含量升高。
如果污泥负荷和容积负荷过高,又会造成污水中的有机物氧化不彻底,出水水质变差。
另外,污泥负荷与污泥膨胀的关系直接相关,不仅污泥负荷和容积负荷过高会导致污泥膨胀,针对不同水质,包括曝气池的污泥负荷在内的各种参数都要经过运行实践来确定。
问:什么是有机负荷率?答:有机负荷率可以分为进水负荷和去除负荷两种。
进水负荷是指曝气池内单位重量的活性污泥在单位时间内承受的有机质的数量,或单位有效曝气池容积在单位时间内承受的有机质的数量,即进水有机负荷可以分为污泥负荷Ns和容积负荷Nv两种。
去除负荷是指曝气池内单位重量的活性污泥在单位时间内去除的有机质的数量,或单位有效曝气池容积在单位时间内去除的有机质的数量。
因此,去除负荷可以用进水负荷和去除率两个参数来表示。
有机负荷率是影响有机污染物降解和活性污泥增长的重要因素。
PLC应用技术3.项目三 三相异步电机的点动、连续运行控制

WZKE
2 S7-1200 CPU的数据访问
STEP 7 的寻址方式有立即寻址、直接寻址和间接寻址三大类。立即寻址是指数据在指令中以常数形式出现; 直接寻址是指在指令中直接给出要访问的存储器或寄存器的名称或地址编号;间接寻址是指使用指针间接给出要 访问的存储器或寄存器的地址。下面介绍直接寻址的几种方式。
字节 字
IB
IB1
IW
IW0
武职凯尔 输出过程映像区Q
双字 位 字节 字 双字 位
ID
ID0
Q
Q0.0
QB
QB0
QW
QW0
QD
QD0
M
16 bit 1D=2W=4B= 32bit
位存储区 M
字节 字
MB
MB10
MW
MW10
双字
MD
MD10
位
DBX
DB0.DBX0.0
武职凯尔(3) 字寻址。字寻址访问一个 16位的存储区,包含两个字节。 格式:存储器标识符+数值小的 字节号。例如:MW2,包括 MB2和MB3两个字节,其中 MB2是高8位字节,MB3是低8 位字节,如图
2020/8/11
WZKE
2 S7-1200 CPU的数据访问
STEP 7 的寻址方式有立即寻址、直接寻址和间接寻址三大类。立即寻址是指数据在指令中以常数形式出现; 直接寻址是指在指令中直接给出要访问的存储器或寄存器的名称或地址编号;间接寻址是指使用指针间接给出要 访问的存储器或寄存器的地址。下面介绍直接寻址的几种方式。
0
0 保持前一状态
0
0
1
0
0
0
保持前一状态
1
1
和置位(S1)信号都为1,则输出为1
【PPT】什么是运动控制系统.

从电能的转换及传递(传输)角度来看,把电力拖动称为电 力传动,把电力拖动控制系统称为电力传动控制系统。由于 这类系统的基本任务是通过控制和调节电动机的旋转速度或 转角来实现工作机械对速度或位移的要求,因此把电力拖动 控制系统又称为运动控制系统。 电力拖动控制系统按被控制量的不同分为两大类: 以电动机的转速为被控制量的系统叫做调速系统; 以工作机械的角位移或直线位移为被控制量的系统叫做位 置伺服系统,又叫做位置随动系统。 电力拖动控制系统还有其他多种类型,如张力控制系统, 多电动机同步控制系统等。虽然电力拖动控制系统种类很多, 但是,各种电力拖动控制系统都是通过控制电动机转速来工 作的,因此,调速系统是最基本的电力拖动控制系统。
0.3 运动控制系统的发展过程及应用
纵观运动控制的发展历程,交、直流两大电气传动并 存于各个工业领域,虽然各个时期科学技术的发展使它 们所处的地位、所起的作用不同,但它们始终是随着工 业技术的发展,特别是电力电子和微电子技术的发展, 在相互竞争、相互促进中,不断完善并发生着变化。由 于历史上最早出现的是直流电机,所以19世纪80年代以 前,直流电气传动是惟一的电气传动方式。直到19世纪 末,出现了交流电,且解决了三相制交流电的输送和分 配问题,并制成了经济适用的鼠笼异步电机,这就使交 流电气传动在工业中逐步地得到广泛的应用。由于大量 使用异步电机,严重影响到电网的功率因数,同步电机 的诞生和使用大大缓解了功率因数问题。在20世纪的大 部分时间里,基本形成直流调速、交流不调速的格局。
运动控制系统的共同特点(续)
(7)可以控制单台电机运行,也可多台协调控制运行, 只是控制方法略有不同而已。 (8)只要合理地选择控制方案,几乎可以适用于任何 传动场合。 由于上述特点,运动控制系统被广泛地用于相关行 业的各个实际需求中。据统计,我国电动机的装机容 量约为4亿多千瓦,其用电量占当年全国发电量的 60%一70%,如何合理、有效、经济地利用好这一 部分电能,提高劳动生产率,运动控制系统的设计者 们对此有着不可推卸的责任。
运控总结
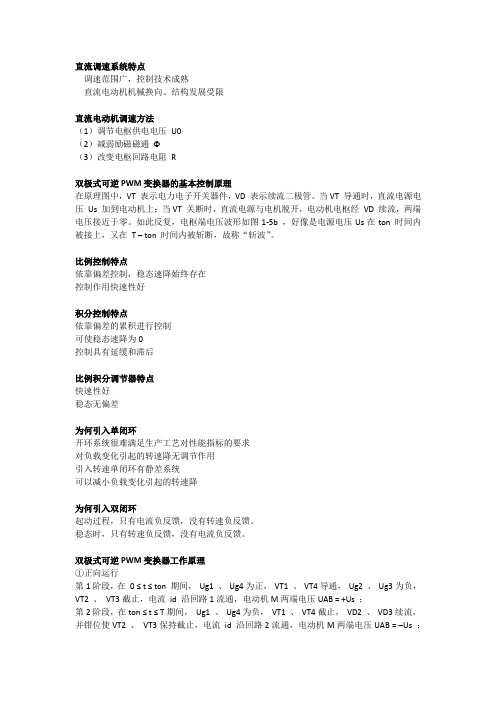
直流调速系统特点调速范围广,控制技术成熟直流电动机机械换向、结构发展受限直流电动机调速方法(1)调节电枢供电电压U0(2)减弱励磁磁通(3)改变电枢回路电阻R双极式可逆PWM变换器的基本控制原理在原理图中,VT 表示电力电子开关器件,VD 表示续流二极管。
当VT 导通时,直流电源电压Us 加到电动机上;当VT 关断时,直流电源与电机脱开,电动机电枢经VD 续流,两端电压接近于零。
如此反复,电枢端电压波形如图1-5b ,好像是电源电压Us在ton 时间内被接上,又在T – ton时间内被斩断,故称“斩波”。
比例控制特点依靠偏差控制,稳态速降始终存在控制作用快速性好积分控制特点依靠偏差的累积进行控制可使稳态速降为0控制具有延缓和滞后比例积分调节器特点快速性好稳态无偏差为何引入单闭环开环系统很难满足生产工艺对性能指标的要求对负载变化引起的转速降无调节作用引入转速单闭环有静差系统可以减小负载变化引起的转速降为何引入双闭环起动过程,只有电流负反馈,没有转速负反馈。
稳态时,只有转速负反馈,没有电流负反馈。
双极式可逆PWM变换器工作原理①正向运行第1阶段,在0 ≤t ≤ton期间,Ug1 、Ug4为正,VT1、VT4导通,Ug2 、Ug3为负,VT2、VT3截止,电流id沿回路1流通,电动机M两端电压UAB = +Us;第2阶段,在ton≤t ≤T期间,Ug1 、Ug4为负,VT1、VT4截止,VD2、VD3续流,并钳位使VT2、VT3保持截止,电流id 沿回路2流通,电动机M两端电压UAB = –Us;②反向运行第1阶段,在0 ≤t ≤ton期间,Ug2 、Ug3为负,VT2、VT3截止,VD1、VD4续流,并钳位使VT1、VT4截止,电流–id沿回路4流通,电动机M两端电压UAB = +Us;第2阶段,在ton≤t ≤T 期间,Ug2 、Ug3 为正,VT2、VT3导通,Ug1 、Ug4为负,使VT1、VT4保持截止,电流– id沿回路3流通,电动机M两端电压UAB = – Us;③输出平均电压P15直流平均环流的抑制方法采用封锁触发脉冲的方法,在任何时候,只允许一组晶闸管装置工作;采用配合控制的策略,使一组晶闸管装置工作在整流状态,另一组则工作在逆变状态。
2024年疾控中心实习心得体会(3篇)

2024年疾控中心实习心得体会时光荏苒,转眼间,在____区疾控中心的两个月实习生涯已然落下帷幕。
回顾实习期间的种种经历,内心充满感慨。
在实习期间,我秉持着勤奋学习的态度,不断提升自身的综合素质,准确把握自我定位。
在检验科诸位资深同事和领导的悉心指导下,我深入学习了专业知识,掌握了各类仪器操作,并能够独立完成各项检验任务。
我积极进取,追求真知,秉持与时俱进的工作精神。
同事们的无私关怀和教诲,至今仍历历在目,令人动容。
在离开这个初涉职场的地方之际,心中固然有许多不舍,但为了在更广阔的领域发挥个人价值,我选择继续前行。
我坚信,这段实习经历将成为我人生中难以忘怀的篇章。
以下是对我两个月实习工作的总结:一、感想与体会1. 工作态度至关重要作为检验科的一员,我深知工作必须严谨细致,对每个细节都保持高度关注。
在完成工作任务的我始终保持着极高的工作热情,严格遵守劳动纪律,有效利用工作时间,并在工作之余总结经验,不断提升工作效率。
尽管在工作中遇到挫折和批评,但我认为这些都是成长的机会,能让我在未来的工作中更加谨慎、高效。
2. 勤于思考在岗位上,我始终勤于思考,不断优化工作方法,提升效率。
初入检验科时,我对工作感到陌生和迷茫。
为了顺利完成任务,我积极适应新环境,虚心求教,不断摸索实践,短时间内便熟悉了工作技巧,明确了工作流程,提高了工作能力。
3. 持续学习我深知不断丰富专业知识和技能的重要性,这有助于工作的顺利开展。
为了弥补自身知识不足,我每天坚持学习,为今后的工作打下了坚实的基础。
二、工作成果与收获1. 理化检验在理化实验室,我得到了经验丰富的师兄师姐的悉心指导,快速掌握了实验原理和操作步骤,深入理解了检验专业的内涵。
实习期间,我掌握了以下技能:a. 了解食品和水质理化检验的卫生意义,熟悉检验任务和基本指标,掌握样品采集和保存方法。
b. 学习理化实验室的管理制度。
c. 熟悉水质物理指标的测定原理和方法,掌握食品样品的预处理和常用分析方法。
《运动控制》练习题及答案解析
《运动控制》练习题及答案解析1、下述调节器能消除被控量稳态误差的为(C )。
A 比例调节器B 微分调节器C PI 调节器D PD 调节器2、双闭环直流调速系统,ASR 、ACR 均采用PI 调节器,期中ACR 所起的作用为(D )。
A 实现转速无静差B 对负载变化起抗扰作用C 输出限幅值决定电动机允许的最大电流D 对电网电压波动起及时抗扰作用3、采用PI 调节器的转速、电流双闭环调速系统,若要改变电动机的转速,应调节(B )。
A 调节器放大系数B 给定电压C 负载D 以上说法都不对4、某闭环调速系统的调速范围是1500~150r/min ,要求系统的静差率2%s ≤,那么系统允许的静态速降是( A )。
A 3.06r/minB 4r/minC 4.13r/minD 以上结果都不对5、在可逆运行系统当中,抑制瞬时脉动环流措施为( A )。
A 采用均衡电抗器B 采用平波电抗器C 采用α=β配合控制D 以上说法都不对6、适用于高速段数字测速的方法为( A )。
A M 法B T 法C M/T 法D F 法7、在桥式可逆直流脉宽调速系统当中,镇流电阻的作用是( C )。
A 限流B 分压C 抑制泵升电压D 以上说法都不对8、在伯德图上,截止频率越高,则系统的(B )。
A 稳定性越好B 快速性越好C 稳态精度越高D 以上说法都不对9、异步电动机变压变频调速系统属于如下哪种类型?(C )A 电磁功率回馈型B 转差功率回馈型C 转差功率不变型D 转差功率消耗型10、如下几种变频调速方法中,哪种控制方式的异步机机械特性是一条直线?() A 1gE f =常数 B 1s U f =常数 C 1s E f =常数 D 1r E f =常数11、不属于抑制电流脉动的措施的是(。
DA 增加整流电路相数B 采用多重化技术C 设置平波电抗器D 设置环流电抗器12、 输入为零时输出也为零的调节器是(A )。
A P 调节器B I 调节器C PI 调节器D PID 调节器13、在同样的负载扰动下,闭环系统的转速降落cl n 与开环下的op n 之比为( D )。