最小区域公式
不等式的最大值与最小值计算公式

不等式的最大值与最小值计算公式不等式在数学中可是个相当重要的家伙,尤其是在求解最大值和最小值的时候。
那咱就好好唠唠不等式的最大值与最小值计算公式。
先来说说啥是不等式。
想象一下,你和小伙伴比赛跑步,你规定自己跑的距离不能超过500 米,这就是一个不等式。
用数学的语言来说,就是比如x ≤ 500 。
那咋求不等式的最大值和最小值呢?这可得有点技巧。
咱先从简单的线性不等式说起。
比如说,有个不等式2x + 3y ≤ 12 ,同时 x 和 y 都得是大于等于 0的整数。
这时候,咱们可以通过画图来解决。
把这个不等式看成一个直线方程 2x + 3y = 12 ,然后在坐标系里画出这条直线。
接着,因为 x和 y 都得大于等于 0 ,所以咱们只看第一象限的部分。
然后你就会发现,满足这个不等式的点就在直线下方和坐标轴围成的区域里。
再举个例子,我曾经教过一个学生小明,他一开始对这种问题简直是一头雾水。
我就给他举了个生活中的例子。
比如说,他有100 块钱,买苹果每个 5 块,买香蕉每根 3 块,而且他买的苹果和香蕉加起来的钱不能超过 100 块。
那他能怎么买才能让买的水果数量最多或者最少呢?小明听了这个例子,眼睛一下子亮了,开始自己琢磨起来。
咱们接着说,如果是二次不等式呢?像 x² + 2x - 3 ≤ 0 。
这时候,咱们得先把它变成 (x + 3)(x - 1) ≤ 0 ,然后求出它的零点 -3 和 1 ,再根据二次函数的图像来判断不等式的解集。
还有一种情况,就是多个不等式组成的系统。
比如说,有x + y ≤ 5 ,x - y ≥ 1 。
这时候,咱们就得把每个不等式都按照前面说的方法处理,然后找出它们的公共区域,这个公共区域里的点就是同时满足这些不等式的解。
总之,求不等式的最大值和最小值,就像是在一个迷宫里找出口,得有耐心,有方法,多尝试。
就像小明,一开始觉得难,后来掌握了方法,自己也能解决不少问题啦。
所以啊,同学们,别害怕不等式,多练练,多想想,你就能轻松搞定它们,求出最大值和最小值,在数学的世界里畅游无阻!。
excel表格套用公式大全
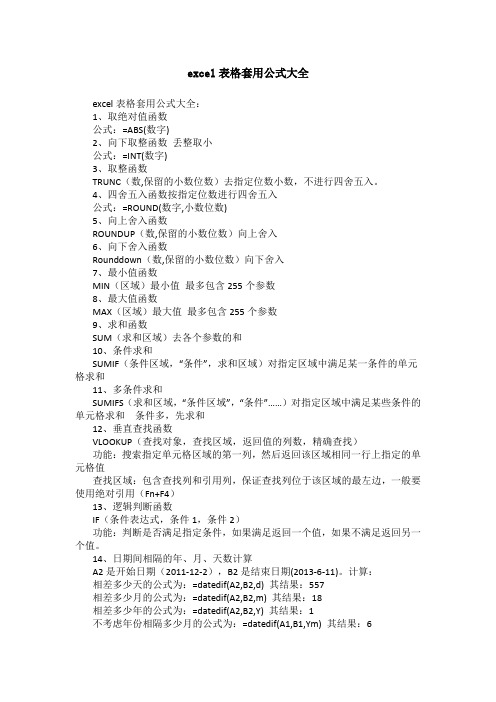
excel表格套用公式大全excel表格套用公式大全:1、取绝对值函数公式:=ABS(数字)2、向下取整函数丢整取小公式:=INT(数字)3、取整函数TRUNC(数,保留的小数位数)去指定位数小数,不进行四舍五入。
4、四舍五入函数按指定位数进行四舍五入公式:=ROUND(数字,小数位数)5、向上舍入函数ROUNDUP(数,保留的小数位数)向上舍入6、向下舍入函数Rounddown(数,保留的小数位数)向下舍入7、最小值函数MIN(区域)最小值最多包含255个参数8、最大值函数MAX(区域)最大值最多包含255个参数9、求和函数SUM(求和区域)去各个参数的和10、条件求和SUMIF(条件区域,“条件”,求和区域)对指定区域中满足某一条件的单元格求和11、多条件求和SUMIFS(求和区域,“条件区域”,“条件”……)对指定区域中满足某些条件的单元格求和条件多,先求和12、垂直查找函数VLOOKUP(查找对象,查找区域,返回值的列数,精确查找)功能:搜索指定单元格区域的第一列,然后返回该区域相同一行上指定的单元格值查找区域:包含查找列和引用列,保证查找列位于该区域的最左边,一般要使用绝对引用(Fn+F4)13、逻辑判断函数IF(条件表达式,条件1,条件2)功能:判断是否满足指定条件,如果满足返回一个值,如果不满足返回另一个值。
14、日期间相隔的年、月、天数计算A2是开始日期(2011-12-2),B2是结束日期(2013-6-11)。
计算:相差多少天的公式为:=datedif(A2,B2,d) 其结果:557相差多少月的公式为:=datedif(A2,B2,m) 其结果:18相差多少年的公式为:=datedif(A2,B2,Y) 其结果:1不考虑年份相隔多少月的公式为:=datedif(A1,B1,Ym) 其结果:6不考虑年份相隔多少天的公式为:=datedif(A1,B1,YD) 其结果:192不考虑年份月份相隔多少天的公式为:=datedif(A1,B1,MD) 其结果:9 datedif函数第3个参数说明:Y 时间段中的整年数。
圆度误差评定中最小区域法的计算机叠代算法(一)(精)

圆度误差评定中最小区域法的计算机叠代算法(一)回转体零件,其横截面轮廓是否为一正圆,需要与一理想圆进行比较才能得出结论,圆度误差的评定过程就是将被测横截面的实际轮廓与理想圆比较的过程。
最小条件法是圆度误差评定中寻找理想圆的基本原则,目前经常采用的方法有最小二乘法、最小外接圆法、最大内切圆法和最小区域法。
其中,最小区域法是一种新的优良评定方法,它不仅可以获得最小的误差评定结果,而且对零件的性质有稳定的约束(通过包边界),因而是现代测量技术致力研究的评定方法。
在传统圆度测量仪中,实现最小区域圆评定的方法是测量仪通过传感器描绘出被测工件的轮廓误差曲线,然后测量人员用同心圆模板来试凑包容轮廓误差曲线,直到符合最小区域圆条件为止。
当用计算机对传统圆度仪进行改造时,首先要解决的就是各种评定方法的算法,我们用计算机叠代法推导了最小区域圆的算法。
1零件坐标系的建立当被测零件放在测量仪器的工作台上时,零件圆心不能与工作台圆心绝对重合,所以零件坐标系不等于仪器坐标系,在实际测量中,测量点的坐标值是仪器坐标值,而圆度误差测量的基准参考系应是零件基准坐标系。
因此,必须将测量点的仪器坐标值转换成零件坐标值。
最小区域圆的评定过程就是根据基于仪器坐标的实际测量值,寻找满足最小区域圆条件的零件坐标原点,并将仪器坐标值转换成零件坐标值的过程。
1.1最小区域圆条件最小区域圆是指用两同心圆包容基于仪器坐标的实际测量曲线,且两同心圆与测量曲线应至少有内外交替的四点接触,满足此条件的两同心圆半径差为最小,两圆的圆心为满足最小区域圆条件的零件坐标系原点,如图1所示。
两圆的半径差为被测工件的圆度误差。
1.2确立零件坐标原点1.2.1确立初始零件坐标原点零件坐标系应基于仪器坐标系,在测量点均匀分布的情况下,可采用最小二乘法确立零件初始坐标原点,在测量非均匀分布的情况下,可取前3点求圆确定其圆心为零件初始坐标原点。
设有n个测量点Pi(i=1,2,?,n),基于仪器坐标值为(Xi,Yi),所求初始零件坐标原点基于仪器坐标系的坐标值为(X,Y),则根据最小二乘圆原理可求得X=2/n∑XiY=2/n∑Yi我们可以将(X,Y)作为最初零件坐标原点基于仪器坐标的坐标值,但该值不一定满足最小区域圆条件,它只能作为寻找满足最小区域圆条件的坐标原点的初值。
最小区域公式参考

直线度 给定平面内最小二乘法LSM :该方法是以最小二乘直线作为评定理想直线,求出实际直线对该直线的最大变动,从而得到直线度误差;该方法的思路是:根据各量测点相对于起始位置的累积值,找到一条直线,使得曲线上各量测点到该直线的距离的平方和为最小;这条直线即为最小二乘直线,是唯一的;但是,用最小二乘法求直线度的致命伤:评定准则与最小区域准则相悖,存在原理误差,故不能得到精确的直线度误差值;有些文献对之改进提出旋转控制直线法,可以得到直线度误差的精确解;设定:最小二乘直线为:bx a y +=其中:∑∑∑∑∑∑∑=======--=-=-=ni n 0i i n 0i i n0i i n0i i ni in 0i i __x n y x n y b x n b y n x b y a 22ii )(1x ))((1x 11 求得各测量点对bx a y +=的变动量,找出最小二乘直线两侧绝对值最大的两点,它们的绝对值之差即为直线度误差; 最大凸度:max i i max bx a y ΔL ][--= 最大凹度:in in ][m i i m bx a y ΔL --= 直线度: min max ΔL ΔL ΔL -=直线度平均值:∑=--=ni i n bx a y n ΔL 1i )(1直线度量测流程最小区域法:评定给定平面内直线度误差的最小区域应符合如下两个最小包容区域判定条件:①误差曲线全部位于两平行直线之间②两平行直线与误差曲线组成高、低相间的三点接触平面度给定平面内如下图所示,测量基准平面为o-o平面,实际被测平面每一测点对o-o 平面的高度坐标z ij=f x i,y i;设理想评定基面与z轴的截距为α,与x 轴的倾角为β,与y轴的倾角为γ,则理想评定基准平面的方程近似为:z=α+βx+γy评定基准面到测量基准面的高度坐标值为z’ij=α+βx i+γy i实际被测平面相对于评定基准平面的高度坐标值为v ij=f x i,y i-α+βx i+γy i= z ij-α+βx i+γy i三点法:以通过实际被测平面上任选三点的平面作为理想评定基准面,作平行于该理想平面的两个包容实际平面的平面,则此两平行平面间的距离即为平面度误差;或者如下定义:以三等高点为基准平面,作平行于基准平面且过最高点和最低点两平行平面,则其平面度误差为上、下两平行平面之间的距离,即:最高点读数值减去最低读值;最小二乘法:该方法是以最小二乘平面作为理想标定基准平面,做两个包容实际平面且平行于最小二乘平面的平面,则此两平面间的距离即为平面度误差; 设最小二乘平面方程为:γy βx αz ++=其中γβα、、由下面的方程组确定:∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑=================++=++=++n1j ijj m1i m1i 2j n1j ji m1i n1j j n1j iji m1i n1j ji m1i m 1i 2i m 1i i n1j ij m1i n 1j j m 1i i zy )y(m )y x ()y (m zx )y x ()x (n )x (n z)y (m )x (n mn γβαγβαγβα求出各测量点对γy βx αz ++=的变动,找出最小二乘平面两侧绝对值最大的两点,它们的绝对值之差即为平面度误差;最小区域法:两平行理想平面与被测实际平面的接触状态符合下述三种情况之一,则两平行平面之间的区域为最小区域,两平行平面间的距离为平面度误差;①三角形准则:被测实际平面与两平行理想平面的接触点,投影在一个面上成三角形,且三高夹一低或三低夹一高②交叉准则:被测实际平面与两平行理想平面的接触点,投影在一个面上成两线段交叉形;③直线准则:被测实际平面与两平行理想平面的接触点,投影在一个面上成一直线形,且两高间一低或两低间一高;用最先区域法评定平面度误差,主要是确定符合最小区域的理想平面,然后将实际平面各点测得值换算成对它的坐标值,平面度误差即可求出;圆度误差最小二乘法:圆度误差曲线如图所示;回转中心为o,各量测点到o 的半径为R i ,θi 为回转角;设最小二乘圆的圆心为o ’,各测点到o ’的半径为R ’i,最小二乘圆半径为R LS各量测点对xoy 坐标系的坐标为:⎪⎩⎪⎨⎧==i sin θi R iy i cos θi R i x 可以求得各量测点的R i ’与R LS 的差为Vi,即 Vi= R i ’-R LS =R i +u1cos θi +u2sin θi -R LS其中:⎪⎪⎪⎩⎪⎪⎪⎨⎧∆-=∆-=∆+=∑∑∑===n1i ii 2n1i i i 1n1i LS sin R n 2u cos R n 2u )R R (n 1R θθ于是可以得到真圆度误差:}isin 2u i cos 1u i R {min }i sin 2u i cos 1u i R {max θθθθ++∆-++∆=∆ 最小区域法:如图所示,用两个同心圆包容实际被测轮廓,该轮廓上至少有四个实测点内外相间的与两个圆周接触,则这两个同心圆之间的区域就是最小包容区域简称最小区域,这两个同心圆就叫做最小区域圆,两同心圆的半径之差即为真圆度误差;用最小区域法评定圆度误差主要是求解最小区域圆的圆心; 如下图所示,回转中心为o,最小区域圆的圆心为o ’,实际测点到o 的半径为R i ,到o ’的半径为R i ’,R i ’ =R i +u1cos θi +u2sin θi设内、外包容最小区域圆与实际轮廓的1、2、3、4点接触,复合交叉准则,则有⎩⎨⎧++=++++=++42414222123231312111sin u cos u R sin u cos u R sin u cos u R sin u cos u R θθθθθθθθ R R R i i +∆=,R 是给定起始测量圆的半径,i R ∆是实测值,故有⎩⎨⎧++∆=++∆++∆=++∆42414222123231312111sin u cos u R sin u cos u R sin u cos u R sin u cos u R θθθθθθθθ 1 由于i R ∆和i θ已知,故可以求出最小区域圆的圆心坐标u 1,u 2,则圆度误差为)sin (sin u )cos (cos u )R R (R R 21221121'2'1θθθθ-+-+∆-∆=-=∆或)sin (sin u )cos (cos u )R R (R R 43243143'4'3θθθθ-+-+∆-∆=-=∆在评定圆度误差的过程中,先大致选符合交叉准则的四点代入1式计算出u 1,u 2然后以u 1,u 2为圆心作过所选四点两包容圆;若实际轮廓全部在两同心圆之间的区域,则计算出的圆度误差是符合最小条件的圆度误差;若实际轮廓超出两同心圆之间的区域,则应重新选点迭代,直到符合条件为止;最小外接圆法:作实际轮廓的最小外接圆,以最小外接圆的圆心作出实际轮廓的最大内接圆的圆心,则两同心圆的半径差为圆度误差;用最小外接圆法评定圆度误差主要是求出最小外接圆的圆心,其方法与最小二乘法和最小区域法类似;最大内切圆法:做实际轮廓的最大内切圆,以最大内切圆的圆心作出实际轮廓的最小外接圆,则两同心圆的半径之差为圆度误差;用最大内切圆法评定圆度误差主要是求出最大内切圆的圆心,其方法与最小二乘法和最小区域法类似;用最小二乘法、最小外接圆法和最大内切圆法评定的圆度误差一般均比用最小区域法评定的圆度误差要大,因此,用最小区域法评定的圆度误差是圆度合格性的最后仲裁依据;。
WPS公式数据条件求平均最大最小百分比日期时间
WPS公式数据条件求平均最大最小百分比日期时间在数字处理软件中,WPS公式是非常强大和实用的工具。
其中,数据条件求平均、最大、最小以及百分比的计算都是常见需求。
同时,日期和时间的处理也是我们在数据分析和计算中经常遇到的情况。
本文将详细介绍如何使用WPS公式,在数据条件下求取平均值、最大值、最小值、百分比以及日期和时间相关的操作。
1. 数据条件求平均值在数据分析过程中,我们经常需要根据某种特定条件计算平均值。
WPS中可以通过使用“AVERAGEIF”函数来实现。
该函数的语法如下:=AVERAGEIF(range, criteria, [average_range])其中,range是要进行条件判断的区域,criteria是条件,average_range是要计算平均值的区域。
具体操作如下:1) 打开WPS电子表格,将要进行数据条件求平均值的区域和条件输入到相应的单元格中;2) 选择需要计算平均值的区域,点击函数栏中的“插入函数”,在函数列表中选择“平均值”,然后点击“确定”;3) 弹出的函数参数对话框中,选择“范围”栏,输入数据条件的区域;4) 在“条件”栏中,输入条件的值;5) 如果要计算其他区域的平均值,可以在“平均值”栏中,输入计算平均值的区域;6) 点击“确定”,即可得到所需的数据条件求平均值。
2. 数据条件求最大值和最小值除了平均值,我们在实际应用中可能还需要根据特定条件来获取数据的最大值和最小值。
WPS提供了相应的函数“MAXIFS”和“MINIFS”来实现。
这两个函数的语法如下:=MAXIFS(max_range, criteria_range1, criteria1, [criteria_range2, criteria2,...])=MINIFS(min_range, criteria_range1, criteria1, [criteria_range2, criteria2,...])其中,max_range和min_range是要获取最大值和最小值的区域范围,criteria_range1、criteria_range2等是条件的区域范围,criteria1、criteria2等是条件的值。
15个常用的excel函数公式,拿来即用
15个常用的excel函数公式,拿来即用摘要:1.概述:介绍15 个常用的Excel 函数公式2.求和函数:SUM3.平均值函数:AVERAGE4.计数函数:COUNT5.最大值和最小值函数:MAX 和MIN6.条件函数:IF7.逻辑函数:AND、OR、NOT8.汇总函数:SUMIF 和SUMIFS9.条件格式函数:IF、IFERROR10.数据筛选函数:FILTER11.数据排序函数:SORT12.条件排序函数:SORTIF13.透视表函数:PIVOTTABLE14.透视图函数:PIVOTCHART15.公式审计函数:AUDIT正文:1.概述在日常的办公和学习中,Excel 是我们经常使用的工具。
掌握一些常用的Excel 函数公式,可以极大地提高我们的工作效率。
本文将为您介绍15 个常用的Excel 函数公式,希望能对您有所帮助。
2.求和函数:SUMSUM 函数用于对一组数值求和。
使用方法为:`=SUM(数字1,数字2,...)`3.平均值函数:AVERAGEAVERAGE 函数用于计算一组数值的平均值。
使用方法为:`=AVERAGE(数字1,数字2,...)`4.计数函数:COUNTCOUNT 函数用于统计一组数值中非空单元格的数量。
使用方法为:`=COUNT(数字1,数字2,...)`5.最大值和最小值函数:MAX 和MINMAX 函数用于求一组数值中的最大值,MIN 函数用于求一组数值中的最小值。
使用方法为:`=MAX(数字1,数字2,...)`和`=MIN(数字1,数字2,...)`6.条件函数:IFIF 函数用于根据指定条件返回相应的结果。
使用方法为:`=IF(条件,结果1,结果2)`7.逻辑函数:AND、OR、NOTAND 函数用于判断多个条件是否同时成立,OR 函数用于判断多个条件是否有一个成立,NOT 函数用于对条件取反。
使用方法为:`=AND(条件1,条件2,...)`、`=OR(条件1,条件2,...)`和`=NOT(条件)`8.汇总函数:SUMIF 和SUMIFSSUMIF 函数用于根据指定条件对一组数值求和,SUMIFS 函数用于根据多组条件对一组数值求和。
不规则r角最小区域法
不规则r角最小区域法说起“不规则r角最小区域法”,可能很多人一听就头大,脑袋里一片迷雾。
但你别着急,今天我就给大家说一说这个看起来高大上的东西,保证你听了之后一秒钟明白,而且不觉得它是啥“高冷”知识。
我们就从生活中常见的东西说起,反正这些年,大家总是喜欢从生活中找点儿“感觉”,对吧?咱们先从一个简单的例子说起。
你有没有在楼上看过停车场?你想啊,车停的不是四四方方的,不规则的停车位总会让你头疼,对吧?特别是有些车特别大,停到小车位上,总觉得“哎呀,不是那么合适”。
这不就是生活中我们经常遇到的“最小区域”问题嘛。
想象一下,停车场地如果是一个不规则的形状,怎么才能让它最有效地利用起来呢?这些看似不搭嘎的碎片,咋才能拼接得恰到好处,才能让每一辆车都找到它的“舒适区”呢?这时候,就轮到“不规则r角最小区域法”大显身手了。
这方法听起来好像很复杂,但实际上它是在做一件事——找最小的空间,让每一块区域都能在这个最小的空间内占有一席之地。
你别看名字拗口,其实就是说,如何用最省力、最省地的方式去安排和优化这些不规则的区域,确保每一部分都得到合理的利用。
你也许会想,“哎呀,这听着像数学题,感觉又要做几何证明了。
”别怕!真不难。
你想啊,就像拼图一样,我们要把这些不规则的部分摆放得整整齐齐,给每个“角落”留个地方,不让空间浪费。
关键在于,你要找到这个最小的区域,这个区域就是所有碎片最紧凑、最合适的位置,虽然看起来有点儿费劲,但一旦找对了,就能让整个空间显得井井有条,和谐统一。
是不是觉得有点儿抽象?别急,咱们换个简单点儿的方式来形容。
如果你曾经整理过厨房,那感觉差不多。
你想想,厨房里的调料瓶,锅碗瓢盆一堆,都是不同形状大小的东西,如何把它们合理地放进去,每个东西都不重叠,又不浪费空间,肯定得经过一番考虑吧?这时候,你就用上了“不规则r角最小区域法”。
只不过,在这个方法里,我们关注的不是调料瓶,而是怎么把这些不规则的“角”都摆放得最合理,怎么让它们能最大限度地利用空间。
圆度误差评定中最小区域法的计算机叠代算法

圆度误差评定中最小区域法的计算机叠代算法回转体零件其横截面轮廓是否为一正圆,需要与一理想圆进行比较才能得出结论圆度误差的评定过程就是将被测横截面的实际轮廓与理想圆比较的过程。
最小条件法是圆度误差评定中寻找理想圆的基本原则,目前经常采用的方法有最小二乘法、最小外接圆法、最大内切圆法和最小区域法。
其中最小区域法是一种新的优良评定方法,它不仅可以获得最小的误差评定结果,而且对零件的性质有稳定的约束通过包边界因而是现代测量技术致力研究的评定方法。
在传统圆度测量仪中实现最小区域圆评定的方法是测量仪通过传感器描绘出被测工件的轮廓误差曲线,然后测量人员用同心圆模板来试凑包容轮廓误差曲线,直到符合最小区域圆条件为止。
当用计算机对传统圆度仪进行改造时,首先要解决的就是各种评定方法的算法,我们用计算机叠代法推导了最小区域圆的算法。
1、零件坐标系的建立当被测零件放在测量仪器的工作台上时,零件圆心不能与工作台圆心绝对重合,所以零件坐标系不等于仪器坐标系在实际测量中测量点的坐标值是仪器坐标值而圆度误差测量的基准参考系应是零件基准坐标系因此,必须将测量点的仪器坐标值转换成零件坐标值。
最小区域圆的评定过程就是根据基于仪器坐标的实际测量值,寻找满足最小区域圆条件的零件坐标原点,并将仪器坐标值转换成零件坐标值的过程。
1。
最小区域圆条件最小区域圆是指用两同心圆包容基于仪器坐标的实际测量曲线,且两同心圆与测量曲线应至少有内外交替的四点接触,满足此条件的两同心圆半径差为最小,两圆的圆心为满足最小区域圆条件的零件坐标系原点 1所示两圆的半径差为被测工件的圆度误差1。
确立零件坐标原点.1确立初始零件坐标原点零件坐标系应基于仪器坐标系,在测量点均匀分布的情况下,可采用最小二乘法确立零件初始坐标原点,在测量非均匀分布的情况下可取前点求圆确定其圆心为零件初始坐标原点。
设有个测量点 Pi i1 ,n基于仪器坐标值为Xi,i ,所求初始零件坐标原点基于仪器坐标系的坐标值为XY则根据最小二乘圆原理可求得X n XiY 2 n i我们可以将(XY 作为最初零件坐标原点基于仪器坐标的坐标值,但该值不一定满足最小区域圆条件,它只能作为寻找满足最小区域圆条件的坐标原点的初值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直线度 (给定平面内)
最小二乘法(LSM):该方法是以最小二乘直线作为评定理想直线,求出实际直线对该直线的最大变动,从而得到直线度误差。
该方法的思路是:根据各量测点相对于起始位置的累积值,找到一条直线,使得曲线上各量测点到该直线的距离的平方和为最小。
这条直线即为最小二乘直线,是唯一的。
(但是,用最小二乘法求直线度的致命伤:评定准则与最小区域准则相悖,存在原理误差,故不能得到精确的直线度误差值。
有些文献对之改进提出旋转控制直线法,可以得到直线度误差的精确解。
)
设定:最小二乘直线为:bx a y +=
其中:∑∑∑∑∑∑∑=======--=-=-=n
i n 0i i n 0
i i n
0i i n
0i i n
i i
n 0i i _
_
x n y x n y b x n b y n x b y a 22
i
i )(1x ))((1x 11 求得各测量点对bx a y +=的变动量,找出最小二乘直线两侧绝对值最大的两点,它们的绝对值之差即为直线度误差。
最大凸度:max i i max bx a y ΔL ][--= 最大凹度:in in ][m i i m bx a y ΔL --= 直线度: min max ΔL ΔL ΔL -=
直线度平均值:∑=--=n
i i n bx a y n ΔL 1
i )(1
直线度量测流程
最小区域法:评定给定平面内直线度误差的最小区域应符合如下两个最小包容区域判定条件:
①误差曲线全部位于两平行直线之间
②两平行直线与误差曲线组成高、低相间的三点接触
平面度
(给定平面内)
如下图所示,测量基准平面为o-o平面,实际被测平面每一测点对o-o平面的高度坐标z ij=f(x i,y i)。
设理想评定基面与z轴的截距为α,与x轴的倾角为β,与y轴的倾角为γ,则理想评定基准平面的方程近似为:z=α+βx+γy
评定基准面到测量基准面的高度坐标值为z’ij=α+βx i+γy i
实际被测平面相对于评定基准平面的高度坐标值为
v ij=f(x i,y i)-(α+βx i+γy i)= z ij-(α+βx i+γy i)
三点法:以通过实际被测平面上任选三点的平面作为理想评定基准面,作平行于该理想平面的两个包容实际平面的平面,则此两平行平面间的距离即为平面度误差。
或者如下定义:(以三等高点为基准平面,作平行于基准平面且过最高点和最低点两平行平面,则其平面度误差为上、下两平行平面之间的距离,即:最高点读数值减去最低读值。
)
*******************************************************
最小二乘法:该方法是以最小二乘平面作为理想标定基准平面,做两个包容实际平面且平行于最小二乘平面的平面,则此两平面间的距离即为平面度误差。
设最小二乘平面方程为:
γy βx αz ++=
其中γβα、、由下面的方程组确定:
∑∑
∑∑∑
∑∑∑∑∑
∑∑∑∑
∑∑=================++=++=++n
1
j ij
j m
1
i m
1
i 2j n
1
j j
i m
1
i n
1
j j n
1
j ij
i m
1
i n
1
j j
i m
1
i m 1
i 2
i m 1i i n
1j ij m
1
i n 1
j j m 1
i i z
y )y
(m )y x ()y (m z
x )y x ()x (n )x (n z
)y (m )x (n mn γβαγβαγβα
求出各测量点对
γy βx αz ++=的变动,找出最小二乘平
面两侧绝对值最大的两点,它们的绝对值之差即为平面度误差。
**********************************************************
最小区域法:两平行理想平面与被测实际平面的接触状态符合下述三
种情况之一,则两平行平面之间的区域为最小区域,两平行平面间的距离为平面度误差。
①三角形准则:被测实际平面与两平行理想平面的接触点,投影在
一个面上成三角形,且三高夹一低或三低夹一高
②交叉准则:被测实际平面与两平行理想平面的接触点,投影在一
个面上成两线段交叉形。
③直线准则:被测实际平面与两平行理想平面的接触点,投影在一个面上成一直线形,且两高间一低或两低间一高。
用最先区域法评定平面度误差,主要是确定符合最小区域的理想平
面,然后将实际平面各点测得值换算成对它的坐标值,平面度误差即可求出。
圆度误差
最小二乘法:
圆度误差曲线如图所示。
回转中心为o ,各量测点到o 的半径为R i ,θi 为回转角。
设最小二乘圆的圆心为o ’,各测点到o ’的半径为R ’i ,最小二乘圆半径为R LS
各量测点对xoy 坐标系的坐标为:
⎪⎩⎪⎨⎧==i sin θi R i
y i cos θi R i x 可以求得各量测点的R i ’与R LS 的差为Vi ,即 Vi= R i ’-R LS =R i +u1cos θi +u2sin θi -R LS
其中:⎪⎪⎪⎩
⎪⎪⎪⎨⎧∆-=∆-=∆+=∑∑∑===n
1i i
i 2n
1
i i i 1n
1
i LS sin R n 2u cos R n 2u )
R R (n 1R θθ
于是可以得到真圆度误差:
}i
sin 2u i cos 1u i R {min }i sin 2u i cos 1u i R {max θθθθ++∆-++∆=∆ 最小区域法:
如图所示,用两个同心圆包容实际被测轮廓,该轮廓上至少有四个实测点内外相间的与两个圆周接触,则这两个同心圆之间的区域就是最小包容区域(简称最小区域),这两个同心圆就叫做最小区域圆,两同心圆的半径之差即为真圆度误差。
用最小区域法评定圆度误差主要是求解最小区域圆的圆心。
如下图所示,回转中心为o ,最小区域圆的圆心为o ’,实际测点到o 的半径为R i ,到o ’的半径为R i ’,
R i ’ =R i +u1cos θi +u2sin θi
设内、外包容最小区域圆与实际轮廓的1、2、3、4点接触,复合交
叉准则,则有
⎩⎨⎧++=++++=++4241422212
3231312111sin u cos u R sin u cos u R sin u cos u R sin u cos u R θθθθθθθθ R R R i i +∆=,R 是给定起始测量圆的半径,i R ∆是实测值,故有
⎩⎨⎧++∆=++∆++∆=++∆4241422212
3231312111sin u cos u R sin u cos u R sin u cos u R sin u cos u R θθθθθθθθ (1) 由于i R ∆和i θ已知,故可以求出最小区域圆的圆心坐标(u 1,u 2),则圆度误差为
)sin (sin u )cos (cos u )R R (R R 21221121'
2'1θθθθ-+-+∆-∆=-=∆或)sin (sin u )cos (cos u )R R (R R 43243143'
4'3θθθθ-+-+∆-∆=-=∆在评定圆度误差的过程中,先大致选符合交叉准则的四点代入(1)式计算出u 1,u 2然后以(u 1,u 2)为圆心作过所选四点两包容圆。
若实际轮廓全部在两同心圆之间的区域,则计算出的圆度误差是符合最小条件的圆
度误差;若实际轮廓超出两同心圆之间的区域,则应重新选点迭代,直到符合条件为止。
最小外接圆法:作实际轮廓的最小外接圆,以最小外接圆的圆心作出实际轮廓的最大内接圆的圆心,则两同心圆的半径差为圆度误差。
用最小外接圆法评定圆度误差主要是求出最小外接圆的圆心,其方法与最小二乘法和最小区域法类似。
最大内切圆法:做实际轮廓的最大内切圆,以最大内切圆的圆心作出实际轮廓的最小外接圆,则两同心圆的半径之差为圆度误差。
用最大内切圆法评定圆度误差主要是求出最大内切圆的圆心,其方法与最小二乘法和最小区域法类似。
用最小二乘法、最小外接圆法和最大内切圆法评定的圆度误差一般均比用最小区域法评定的圆度误差要大,因此,用最小区域法评定的圆度误差是圆度合格性的最后仲裁依据。