多路径识别的智能循迹机器人设计与实现
多路径识别的智能循迹机器人设计与实现

万方数据
万方数据
万方数据
万方数据
多路径识别的智能循迹机器人设计与实现
作者:陈杨阳, 蔡建羡, 刘智伟, 乔志龙, CHEN Yang-yang, CAI Jian-xian, LIU Zhi-wei, QIAO Zhi-long
作者单位:陈杨阳,乔志龙,CHEN Yang-yang,QIAO Zhi-long(北方工业大学机电工程学院,北京,100041), 蔡建羡,刘智伟,CAI Jian-xian,LIU Zhi-wei(防灾科技学院防灾仪器系,河北三河,065201)
刊名:
测控技术
英文刊名:Measurement & Control Technology
年,卷(期):2014,33(12)
引用本文格式:陈杨阳.蔡建羡.刘智伟.乔志龙.CHEN Yang-yang.CAI Jian-xian.LIU Zhi-wei.QIAO Zhi-long多路径识别的智能循迹机器人设计与实现[期刊论文]-测控技术 2014(12)。
《多种方法实现机器人循迹》 教学设计

《多种方法实现机器人循迹》教学设计一、教学目标1、让学生了解机器人循迹的基本概念和应用场景。
2、使学生掌握多种机器人循迹的方法和原理。
3、培养学生的动手实践能力和创新思维,能够独立完成简单的机器人循迹系统搭建和调试。
二、教学重难点1、重点(1)掌握常见的机器人循迹传感器的工作原理和使用方法,如光电传感器、红外传感器等。
(2)理解不同循迹算法的实现思路,如基于阈值判断的算法、PID 控制算法等。
2、难点(1)根据实际需求选择合适的传感器和算法,并进行有效的参数调试。
(2)解决机器人在循迹过程中可能遇到的干扰和误差问题,提高循迹的准确性和稳定性。
三、教学方法1、讲授法讲解机器人循迹的基本概念、原理和方法,让学生对相关知识有初步的了解。
2、实验法组织学生进行实验操作,通过实际搭建机器人循迹系统,加深对所学知识的理解和掌握。
3、讨论法引导学生针对实验过程中遇到的问题进行讨论,共同寻找解决方案,培养学生的团队合作和创新思维。
四、教学准备1、实验器材机器人套件(包括控制器、电机、传感器、车架等)、电脑、电源、导线等。
2、教学软件编程软件(如 Arduino IDE、Mixly 等)、仿真软件(如 Proteus 等)。
3、教学资源多媒体课件、教学视频、相关技术文档等。
五、教学过程1、导入(5 分钟)通过展示一些机器人循迹的应用案例,如智能小车在特定轨道上行驶、工业机器人按照预定路线进行操作等,引发学生的兴趣,提出问题:机器人是如何实现准确循迹的?从而导入本节课的主题。
2、知识讲解(20 分钟)(1)介绍机器人循迹的基本概念和工作原理,即机器人通过检测外部环境的信息,根据预设的规则和算法,调整自身的运动状态,实现沿着特定轨迹行走的过程。
(2)讲解常见的循迹传感器,如光电传感器、红外传感器等。
分别介绍它们的工作原理、特点和适用场景。
光电传感器:利用光电效应,将光信号转换为电信号。
可以通过检测反射光的强度来判断机器人是否偏离轨迹。
循迹机器人控制器的硬件设计与实现的开题报告

循迹机器人控制器的硬件设计与实现的开题报告一、选题背景与意义循迹机器人是现代机器人技术中的一项重要应用,可以被广泛用于自动导航、智能巡航、工业自动化等领域。
循迹机器人的基本结构为一个小车和配备在小车底部的感光传感器,通过感光传感器采集路面信息,小车控制器根据路面信息对小车的运动轨迹进行控制,以达到“自动驾驶”的目的。
循迹机器人控制器是循迹机器人的核心部件,通过控制器可对循迹机器人进行自动驾驶、巡航等操作。
因此,本文将研究循迹机器人控制器的硬件设计与实现,旨在提高循迹机器人的自动控制和智能化水平。
二、研究内容本文研究内容为循迹机器人控制器的硬件设计和实现。
主要包括以下几个方面:1. 循迹机器人的工作原理和系统结构研究2. 循迹机器人控制器的主要功能与指标研究3. 循迹机器人控制器电路设计4. 循迹机器人控制器PCB设计5. 循迹机器人控制器硬件测试和验证三、研究方法和技术路线本文研究方法主要为实验研究和理论分析相结合的方法。
具体步骤如下:1. 理论研究:阅读相关文献,了解循迹机器人系统结构和工作原理,分析循迹机器人控制器的主要功能和指标。
2. 硬件设计:根据循迹机器人控制器要求和功能需求,进行电路设计。
电路设计主要包括电源电路设计、感光传感器信号处理电路设计等。
3. PCB设计:根据电路设计,进行PCB设计和布线,制作出循迹机器人控制器的PCB板。
4. 硬件测试和验证:对循迹机器人控制器进行硬件测试和验证,验证循迹机器人控制器的功能和性能是否满足实际需求。
四、预期成果通过本文的研究,预计可以实现以下几点成果:1. 掌握循迹机器人控制器的工作原理和系统结构2. 实现循迹机器人控制器的硬件设计和实现3. 验证循迹机器人控制器的功能和性能,推广循迹机器人技术的应用五、进度安排本文的研究计划为一个学期,预计研究进度安排如下:1. 第一周:查阅相关文献,确定研究方向和内容2. 第二周至第四周:进行理论研究和方案设计,制定实验方案3. 第五周至第七周:进行电路设计和PCB设计4. 第八周至第九周:制作出循迹机器人控制器的PCB板5. 第十周至第十二周:进行循迹机器人控制器硬件测试和验证6. 第十三周至第十四周:整理实验数据和分析结果7. 第十五周至第十六周:编写开题报告六、参考文献1. 杨伟民,刘传明, 循迹机器人及其控制技术,电子技术与软件工程,2006年06期2. 潘强,刘怀苗, 基于AVR单片机的循迹小车控制算法研究,计算机应用,2011年S1期3. 王旭红,李亚平,孙云峰,基于ARM的循迹智能小车设计,电子技术应用,2014年02期。
基于路径识别的巡线机器人控制系统设计
收稿日期:2009-11-05基金项目:国家863高技术研究发展计划(2007AA04Z213);江苏省高等学校大学生实践创新训练计划(2008-297)作者简介:瞿哲奕(1984 -),男,硕士研究生,研究方向为机器人及控制技术。
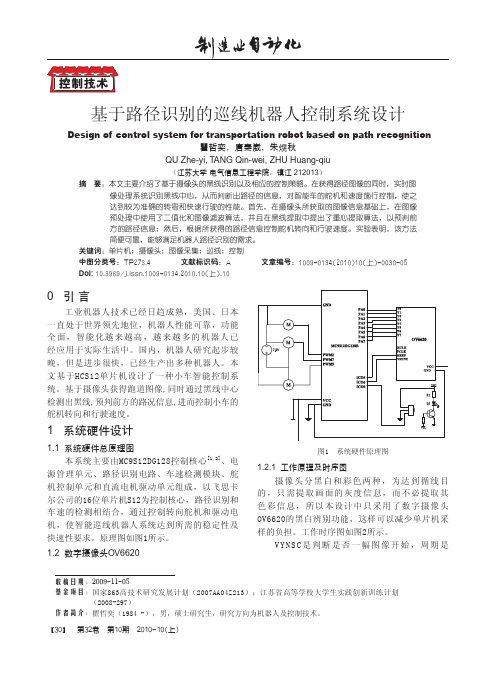
基于路径识别的巡线机器人控制系统设计Design of control system for transportation robot based on path recognition瞿哲奕,唐秦崴,朱熀秋QU Zhe-yi, T ANG Qin-wei, ZHU Huang-qiu(江苏大学 电气信息工程学院,镇江 212013)摘 要:本文主要介绍了基于摄像头的黑线识别以及相应的控制策略。
在获得路径图像的同时,实时图像处理系统识别黑线中心,从而判断出路径的信息,对智能车的舵机和速度施行控制,使之达到较为准确的转弯和快速行驶的性能。
首先,在摄像头所获取的图像信息基础上,在图像预处理中使用了二值化和图像滤波算法,并且在黑线提取中提出了重心提取算法,以预判前方的路径信息;然后,根据所获得的路径信息控制舵机转向和行驶速度。
实验表明,该方法简便可靠,能够满足机器人路径识别的需求。
关键词:单片机;摄像头;图像采集;巡线;控制中图分类号:TP273.4 文献标识码:A 文章编号:1009-0134(2010)10(上)-0030-05Doi: 10.3969/j.issn.1009-0134.2010.10(上).100 引 言工业机器人技术已经日趋成熟,美国、日本一直处于世界领先地位,机器人性能可靠,功能全面,智能化越来越高,越来越多的机器人已经应用于实际生活中。
国内,机器人研究起步较晚,但是进步很快,已经生产出多种机器人。
本文基于HCS12单片机设计了一种小车智能控制系统。
基于摄像头获得跑道图像,同时通过黑线中心检测出黑线,预判前方的路况信息,进而控制小车的舵机转向和行驶速度。
自动循迹机器人(附有程序)
全国大学生电子设计竞赛自动循迹小车摘要摘要:本设计主要包括信号检测模块、主控模块、电机驱动模块。
信号检测模块采用LCD1314电感数字转换器,通过IIC总线与从机通信从而实现循迹和检测硬币。
主控电路采用MC9S12SX128单片机为控制芯片。
电机驱动模块采用L298N 专用电机驱动芯片。
信号检测模块将采集到的路况信号发送给MC9S12SX128单片机,经单片机处理过后对L298N 发出指令进行相应的调整。
单片机通过输出PWM波和对LDC1314采集的信息进行处理,来控制小车的速度及转向并实现自动循迹的功能。
关键词:智能小车,MC9S12SX128,L298N IIC总线ldc1314目录一、系统方案论证 (4)1.系统结构 (4)2.方案论证比较 (4)(1)微控制器模块 (4)(2)电机模块 (4)(3)电机驱动模块 (4)(4) 显示模块 (5)(5) 电源模块 (5)二、测控方法分析 (5)1.控制算法分析 (5)2.运动控制分析 (6)三、系统电路设计 (7)1.系统结构 (7)2.电路设计 (7)四、系统测试与分析 (8)1.测试方案 (8)2.测试条件与仪器 (8)3.测试结果 (8)(1)基本一测试 (8)(2)基本二测试 (8)(3) 基本三测试 (8)五、测试分析与结论 (9)参考文献 (9)附录1:部分源程序 (10)自动循迹小车(C题)【本科组】一、系统方案论证1.系统结构系统以MC9S12XS128单片机为主控器,以5110显示屏、L298N驱动模块、直流电机分别实现转速、时间、距离显示、驱动等功能。
使用C语言编写程序,通过速度编码器检测并读出车轮的转速,并通过触摸按键选择系统的转速模式,实现不同速度的调节。
2.方案论证比较(1)微控制器模块方案一:MC9S12XS128单片机飞思卡尔官方函数库应用简便,开发周期短,速度和功耗方面优势明显。
方案二:51单片机指令集简便,超低功耗,熟练使用开发周期长。
智能循迹小车设计与实现

智能循迹小车设计与实现摘要:智能循迹小车是一种能够根据预设的路径自动行驶的装置。
本文主要介绍了智能循迹小车的设计与实现过程,包括硬件设计、软件编程以及测试和优化等内容。
通过使用光电传感器和电机驱动模块,实现了小车的自动行驶功能。
实验结果表明,智能循迹小车能够准确地沿着指定的路径行驶。
关键词:智能循迹小车,光电传感器,电机驱动模块1.引言智能循迹小车是一种基于传感器和控制模块的自动驾驶装置。
它能够通过感知周围环境并根据预先设定的路径进行行驶。
智能循迹小车在工业生产、仓储管理和物流配送等领域具有广泛的应用前景。
本文主要介绍了智能循迹小车的设计与实现过程。
2.硬件设计主控模块采用单片机作为核心处理器,并配备了存储器、通信接口和控制信号输出等功能。
传感器模块主要由光电传感器组成,用于感知小车当前位置和行驶方向。
执行器模块由电机驱动模块组成,用于控制小车的移动。
3.软件编程传感器数据采集模块负责读取光电传感器的输出信号,并进行信号处理和滤波。
路径规划模块通过分析传感器数据,确定小车当前位置和行驶方向,并根据预设的路径规划算法,确定下一步行驶方向。
运动控制模块通过调节电机驱动模块的输入信号,控制小车的运动。
4.测试与优化为了验证智能循迹小车的性能,我们进行了一系列的测试和优化。
首先,我们对传感器进行了校准,以确保其输出信号的准确性。
然后,我们在实际场景中对小车进行了测试,包括行驶精度、速度和稳定性等方面的测试。
根据测试结果,我们对软件进行了调优,并对硬件进行了优化,以提高智能循迹小车的性能。
5.结论本文介绍了智能循迹小车的设计与实现过程。
通过使用光电传感器和电机驱动模块,我们实现了小车的自动行驶功能。
实验表明,智能循迹小车能够准确地沿着指定的路径行驶。
未来,我们将进一步改进小车的设计和算法,以提高其性能和适应性。
循迹机器人控制系统设计

循迹机器人控制系统设计循迹机器人可用于自动导航、物流、清洁等多种场合,其控制系统设计是其操作的关键。
本文将介绍一种循迹机器人控制系统的设计。
一、硬件设计1.电路板设计循迹机器人需要安装多个传感器来检测运动方向,而且要通过电路板将传感器信息传输到控制单元。
因此,将电路板的布局设计在机器人的主控制中心,并且根据传感器位置安装,以保证数据传输的稳定性和准确性。
2.传感器循迹机器人与地面之间会存在一些差异,如线路的颜色、亮度,因此无论使用什么样的传感器都需要调节灵敏度,以便捕捉到信号能力。
使用红外线传感器(Infrared Sensor)可以检测出黑色线路与白色线路之间的差异,而应答传感器(Resistant Sensors)可以将机器人向左或向右侧的移动量控制在合适的位置。
3.电池由于循迹机器人需要大量的能量,所以Batteries应该被设计成高容量和低消耗能量。
Lithium Polymer Battery即为一例,具有较高的能量密度和低电压消耗。
因此,机器人可以保持长时间的运行而不会对电池造成的过度耗损。
二,软件设计1.控制算法循迹机器人的控制算法需要能够控制机器人上下左右的移动,并忽略极其不必要的信息(如噪音)。
其中,控制算法核心为PID(Proportional-Integral-Derivative)控制器。
该控制器使用传感器输入和设定值(循迹线)之间的误差来计算输出,输出将用于控制循迹机器人的制动,方向等。
PID控制器能够准确地调整输出,以使传感器的误差最终收敛到0。
2.编程语言为了实现PID控制器,需要使用一种编程语言来编写循迹机器人的控制程序。
C语言被认为是循迹机器人控制系统中的最佳选择之一,因为它具有高效性、可靠性和能够实现嵌入式系统控制的强大功能。
三、总结循迹机器人控制系统应包括硬件和软件的两个部分,其中硬件包括电路板、传感器和电池,软件包括控制算法和编程语言。
这些组件的设计和实现可以使循迹机器人能够自动寻找路径,并避免一些障碍物,从而实现其无人驾驶的目标。
智能循迹机器人教学设计
智能循迹机器人教学设计一、教学目标(一)知识与技能目标1、学生能够理解智能循迹机器人的工作原理,包括传感器的作用和控制电路的基本原理。
2、学生能够掌握智能循迹机器人的组装方法,包括硬件的连接和机械结构的搭建。
3、学生能够学会编写简单的控制程序,实现机器人的循迹功能。
(二)过程与方法目标1、通过实践操作,培养学生的动手能力和问题解决能力。
2、通过小组合作,培养学生的团队协作精神和沟通能力。
(三)情感态度与价值观目标1、激发学生对机器人技术的兴趣和探索欲望。
2、培养学生的创新意识和实践精神。
二、教学重难点(一)教学重点1、智能循迹机器人的工作原理和硬件组成。
2、传感器的安装与调试。
3、控制程序的编写与调试。
(二)教学难点1、控制程序的逻辑设计和优化。
2、机器人在复杂环境下的循迹稳定性和准确性的提高。
三、教学方法(一)讲授法讲解智能循迹机器人的基本原理、硬件组成和控制程序的编写方法。
(二)演示法通过演示智能循迹机器人的运行过程,让学生直观地了解其工作方式。
(三)实践法学生分组进行机器人的组装、编程和调试,亲身体验机器人的制作过程。
(四)讨论法组织学生进行小组讨论,共同解决在制作过程中遇到的问题。
四、教学准备(一)教学环境计算机教室,具备网络连接和多媒体教学设备。
(二)教学资源1、智能循迹机器人套件,包括传感器、控制板、电机、车轮、导线等。
2、编程软件,如 Arduino IDE 等。
3、教学课件,包括 PPT、视频等。
4、实验记录表和评价表。
五、教学过程(一)导入(5 分钟)展示一段智能循迹机器人在特定轨道上运行的视频,引起学生的兴趣,提问学生机器人是如何实现自动循迹的,从而引出本节课的主题——智能循迹机器人。
(二)知识讲解(15 分钟)1、介绍智能循迹机器人的工作原理智能循迹机器人通常通过传感器检测地面的黑线或其他标记,将检测到的信号传输给控制板,控制板根据信号控制电机的转动,从而实现机器人的前进、后退、转弯等动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
万方数据
万方数据
万方数据
多路径识别的智能循迹机器人设计与实现
作者:陈杨阳, 蔡建羡, 刘智伟, 乔志龙, CHEN Yang-yang, CAI Jian-xian, LIU Zhi-wei, QIAO Zhi-long
作者单位:陈杨阳,乔志龙,CHEN Yang-yang,QIAO Zhi-long(北方工业大学机电工程学院,北京,100041), 蔡建羡,刘智伟,CAI Jian-xian,LIU Zhi-wei(防灾科技学院防灾仪器系,河北三河,065201)
刊名:
测控技术
英文刊名:Measurement & Control Technology
年,卷(期):2014,33(12)
引用本文格式:陈杨阳.蔡建羡.刘智伟.乔志龙.CHEN Yang-yang.CAI Jian-xian.LIU Zhi-wei.QIAO Zhi-long多路径识别的智能循迹机器人设计与实现[期刊论文]-测控技术 2014(12)。