的运用、矢量方程图解法求一般机构的速度和加速度。
合集下载
机械原理 第二章-2相对运动图解、解析
p c´
acb
t
n t aE aB aEB aEB
大小: 方向: ? ? ω2 2 lBE 2 lCE E→B ⊥BE
b
同理,按照上述方法作出矢量多边形,
n a n cb
n t aE aB aEB aEB
大小: 方向: ? ? ω2 2 lBE 2 lCE E→B ⊥BE
(4) 求aE6和6
2
A
ω3 a3 5
akE6E5 =
n3
b
25vrE6E5
B ω4
ω2
x
E
3
α4 C ω6 6
D
(E5,E6)
x
a6
n4
p(a、d 、f )
c
n6
n t k r aE6 aE6F aE6F aE5 aE6 E5 aE6 E5
B
ω4
ω2 3 α4 C
x 5 E
a3
D
(E5,E6) 6
ω6
x
a6
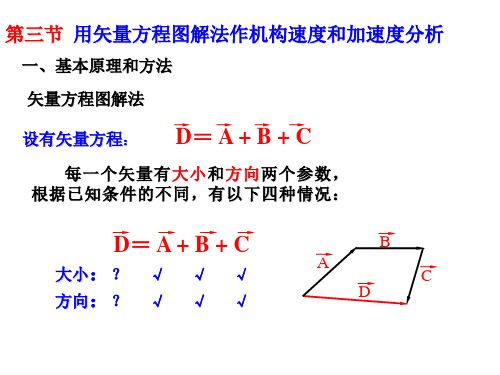
2. 速度分析:
(1) 求vB: (2) 求vC:
2 B ω4
A
ω3 a3 5
ω2
x E
v B l AB 2
3
α4 C ω6 x a6 6
D
(E5,E6)
(3) 求vE3: 用速度影像求解 (4) 求vE6: vE 6 vE 5 vE 6 E 5 大小: ? √ ? 方向:⊥EF √ ∥xx (5) 求3、4、5 3 vCB bc v rad / s; 4 vC pcv rad / s lBC BCl lCD CDl vE 6 pe6 v 6 rad / s
第3.3节 用矢量方程图解法作运动分析
c
速度多边形的用途 由两点的速度求构件上任意点的速度 C A 例如,求BC中间点E的速度VE 时,bc上 中间点e为E点的影像,连接pe就是VE a p ω E B
e b
c
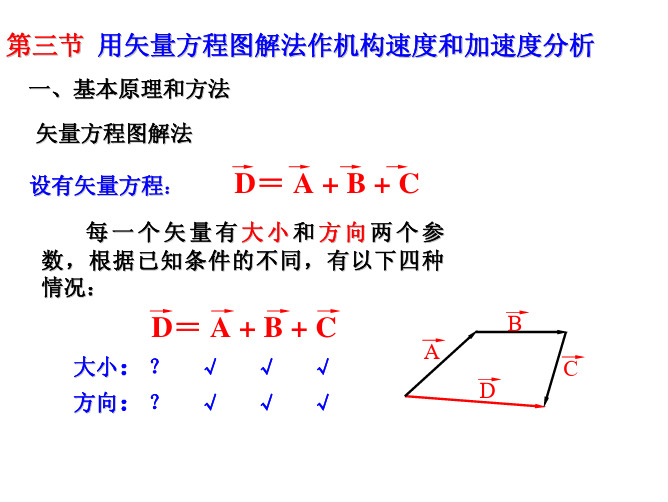
2、同一构件上两点加速度之间的关系 设已知角速度ω ,A点加速度,求B点的加速度 A B两点间加速度之间的关系有: A
BA
C ω B aB
2 2 2
方向:顺时针
+ω +ω +ω
4 4 4
= μ aa’b’ = μ a a’c’ = μ a b’c’ A p’ ω α aA C
B
aB
得:a’b’/ lAB=b’c’/ lBC= a’ c’/ lCA
∴△a’b’c’∽△ABC
p’a’b’c’-加速度多边形(或速度 图解), p’-极点 加速度多边形的特性: ①联接p’点和任一点的向量代表该 点在机构图中同名点的绝对加速 度,指向为p’→该点。
VB B
2
VB B
2
1
1
VB
2
2
B(B1,B2)
vB2 vB1 vB2B1
VB
1
1
A
ω1
VB B
2
VB B
2
1
1
VB
:
aB2 aB1 a k B2B1 a r B2B1
2
2
B(B1,B2)
VB
aB1 a n B1 a t B1
等速
1
1
A
ω1
④极点p’代表机构中所有加速度为零的点。 用途:根据相似性原理由两点的加速度求任 意点的加速度。 例如,求BC中间点E的加速度aE 时,b’c’上中间
机械原理 第九版 第3章平面机构的运动分析矢量

1
√ √
√ √
k B1B 2
•
2
VB1B2 B 哥氏
VB2
aB1 aB 2 a
?
?
a
r B1B 2
√ √
2VB1B 2
将VB1B2顺牵连 转90°
√ √
2
aB2
哥氏加速度是动点B1相对构件2运动 时,由于构件2的牵连运动为转动而产生 的附加加速度。
例 求图所示机构的运动关系
[例] 图示机构,已知各构件尺寸和ω1 、 aB (1) 求υC 、υD和ω2 、 ω5 (2) 求aC 、aD和α2 、 α5
平面机构的运动分析
内 容 运动分析目的和方法 用矢量方程图解法求机构的速度和加速度 用速度瞬心法求机构的速度
重
点
速度瞬心及“三心定理”的运用、矢量方程图 解法求一般机构的速度和加速度。
§1 运动分析目的和方法
目的:
确定机构的运动参数
(轨迹、位移、速度、加速度等)
方法:
图解法(瞬心法、矢量方程)
形象直观、繁琐精度低。
解析法(矢量方程、复数、矩阵等)
精度高、公式复杂、计算量大。
§2平面机构运动分析
(矢量方程图解法)
•矢量方程的图解法
•同一构件上各点间的运动关系
•两构件瞬时重合点间的运动关系
§2
用矢量方程图解法分析平面机构的运动 b
一、矢量方程的图解法
矢量:大小、方向
矢量方程
A
AB C
A C
a
B
x
一个矢量方程可以解两个未知量。
n BA t BA
VA • aA
A V B
VBA
B
√ √
√ √
k B1B 2
•
2
VB1B2 B 哥氏
VB2
aB1 aB 2 a
?
?
a
r B1B 2
√ √
2VB1B 2
将VB1B2顺牵连 转90°
√ √
2
aB2
哥氏加速度是动点B1相对构件2运动 时,由于构件2的牵连运动为转动而产生 的附加加速度。
例 求图所示机构的运动关系
[例] 图示机构,已知各构件尺寸和ω1 、 aB (1) 求υC 、υD和ω2 、 ω5 (2) 求aC 、aD和α2 、 α5
平面机构的运动分析
内 容 运动分析目的和方法 用矢量方程图解法求机构的速度和加速度 用速度瞬心法求机构的速度
重
点
速度瞬心及“三心定理”的运用、矢量方程图 解法求一般机构的速度和加速度。
§1 运动分析目的和方法
目的:
确定机构的运动参数
(轨迹、位移、速度、加速度等)
方法:
图解法(瞬心法、矢量方程)
形象直观、繁琐精度低。
解析法(矢量方程、复数、矩阵等)
精度高、公式复杂、计算量大。
§2平面机构运动分析
(矢量方程图解法)
•矢量方程的图解法
•同一构件上各点间的运动关系
•两构件瞬时重合点间的运动关系
§2
用矢量方程图解法分析平面机构的运动 b
一、矢量方程的图解法
矢量:大小、方向
矢量方程
A
AB C
A C
a
B
x
一个矢量方程可以解两个未知量。
n BA t BA
VA • aA
A V B
VBA
B
矢量方程图解法作速度加速度分析

2、作图方法
具体方法为图解矢量方程。
基础知识:一个矢量有大小和方向两个要素。
用图解的方法一个矢量方程可以求出两个未知要素(包括大小和
方向均可以)。
例题:
C B
A P
A BC
大小 ? √ ?
方向 √ √ √
A BC
大小 √ √ ?
方向 √ √ ?
二、同一构件上两点之间的速度和加速度关系
8
8
B
3
P23 (P24)
2
4
C P34
1
A P12
(b) P13
8
P23 B 3 P34
2
A P12
1
4
P24 C P14
8
(d)
P13
3
A
M P23B
Vm
P24
2 A P12
1
C4
P14 P34
8
青岛滨海学院教师教案 §3-3 用矢量方程图解法作机构的速度及加速度分析
一、矢量方程图解法的基本原理及作图法
注意:速度影像只能应用于同一构件上的各点。 总结:
1) 一个矢量方程最多只能求解两个未知量; 2) P 称为极点,它代表机构中所有构件上绝对速度为零的点;
青岛滨海学院教师教案
(速度多边形中仅此一点,它可能对应机构中多个点:机架上的点或构件的绝 对瞬心点)
3)由 P 点指向速度多边形中任一点的矢量代表该点的绝对速度大小和方 向;
们可以得到:
(B1 B2 ) B
1 2
VB2 VB1 VB2B1
青岛滨海学院教师教案
aB2
a B1
aBr 2B1
第3.3节 用矢量方程图解法作运动分析
a p
e b
c
2、同一构件上两点加速度之间的关系 设已知角速度ω,A点加速度,求B点的加速度 A B两点间加速度之间的关系有: A ω aA C B aB
aB =anB+
大小: √ 方向: √
a tB = a A +
? √ √ √
anBA+
ω2lAB
atBA
? p’
B→A ⊥BA a’
选加速度比例尺μa m/s2/mm, 在任意点p’作图使aA=μap’a’ 求得:aB=μap’b’ atBA=μa nba’ b’ 方向: nba’ → b’ aBA=μab’ a’ 方向: a’ →b’
2 1
B 有a k 3
2 1 B 3 有 ak
B2 3 有ak
1
三、机构运动分析中应注意的若干问题
例 题
3.进行凸轮等高副机构的运动分析时,可采用高副低代方法, 对相应的低副机构作运动分析,二者具有相同的运动特性
⊥AB
//导路 ?
vB 3 ω3 = lBD
?
ω1l AB
c
速度向量图
A 1 2 C P
bLeabharlann ω1B (B1B2B3)vB1 = vB2 = ω1l AB
3
vC = vB + vCB
D 4 E
vCB ω2 = lBC
⊥CE ⊥AB ? ω1l AB
//导路 ?
加速度向量图
aB3 = aB2 + a
A
a
r
B3B2
B→D ω 2 3 l BD
⊥BD ?
A 1 2
B→A
ω 2 1l1
⊥导路(指左) 2vB3B2ω3
机构速度和加速度分析的一般图解法

§3-2 用图解法作机构的运动分析
1.矢量方程图解法
(1)矢量方程图解法的基本原理 理论力学中的运动合成原理 (2)矢量方程图解法的作法 在对机构进行速度和加速度分析时,首先根据运动合成原理 列出机构运动的矢量方程,然后再按方程作图求解 两构件以转动副相连时,在转动副中心处具有相同的速度和
加速度,两构件以移动副相连时,两构件具有相同的角速度和角
§3-2 用图解法作机构的运动分析
3.利用两构件重合点间的速度及加速度矢量方程作图求解 运动合成原理:构件i在重合点的运动可认为是随同构件j在重 合点的运动和构件i相对于构件j的相对运动的合成
重合点选取原则:选已知参数较多的点(一般为铰链点),
为此有时应将构件扩大至所选取的重合点 (1) 列矢量方程并分析各矢量 (2)选取适当比例尺按方程作速度多边形及加速度多边形图 (3)根据作图求解 (4)科氏加速度存在的条件
§3-2 用图解法作机构的运动分析
机构运动的图解法分析包括对机构的位置、速度和加速度的 分析。由于机构的位置图解分析实际上是按给定的机构尺寸及原 动件的位置作出其机构运动简图,在第2章已作介绍,所以本节 主要介绍机构的速度和加速度分析的图解法
一、机构速度及加速度分析的一般图解法
机构的速度及加速度分析的一般图解法为矢量方程图解法, 又称相对运动图解法
科氏加速度存在的条件
当两构件构成移动副,若移动方向无转动分量即只作平动时, 无科氏加速度; 当两构件构成移动副,若移动方向含有转动分量时,存在断
科氏加速度 3
2 2 3 2
2 3
3
大小:√ ?√√
方向:√ √ ?
?
方向:√ √ ? √
B
B
A D
C
速度加速度矢量图解
若求w1,即 的方向
量出 若待求w1: 的方向 。
量出
总结:
注:在哥氏加速度中的W 具体指的是相对的还是绝对的?(后边跟大家讲)
(3)w 是由速度求出的
(4)比例尺=实际尺寸/图上尺寸
两种:做机构示意图的简图 做矢量图(速度 加速度)加速度:
其中 故 W 恒定 则
(1)法向加速度公式: 所以反过来看W 是否可求?切向加速度公式 只
能未知 切向求
(2)一个等式必须首尾相接或者看角标来连线 (其实首尾相接更可靠)
二、速度、加速度影像
(1)、影像别名为相似图形 故满足对应角相等 对应边成比例(作图技巧) 且对应字母顺序一致
(2)、同一构件 (相似保证了它是刚体)(考判断)
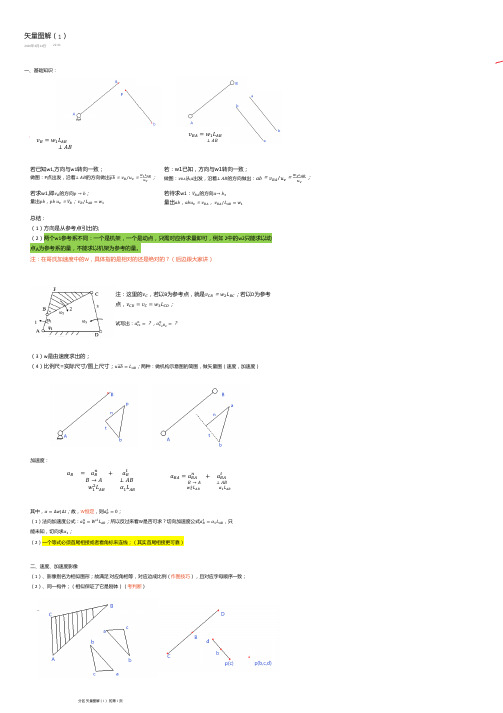
一、基础知识:
若已知w1,方向与w1转向一致
做图:P 点出发 沿着 的方向做出 若:w1已知 方向与w1转向一致 做图: 从 出发 沿着 的方向做出:
注:这里的 若以B 为参考点 就是 若以D 为参考
点
试写出: ?
?矢量图解(1)
2020年4月14日22:31
讨论:
(1)形成三点不共线的影像:转向一样 利用相似=角度相同
(2)形成三点共线的影像:对应边成比例时一定注意对应起点 (3)若矢量图中量出“长度=0” 则会出现“点集中”
注意:图形选择:选择已知量对应的点的图形 例如:求C 求C。
用矢量方程图解法作机构的速度及加速度分析
b2
ω3=v pb3/LBC,顺时针方向
加速度关系a ① 加速度关系
A
r B3B2
aB3 = a
大小 方向 ak
n B3
+a
t B3
= aB2 + a
+a
k B3B2
1 2 B
ω1
? ω23LBC ? ω21LAB ? 2vB3B2ω3 ? B→C ⊥CB B→A // //BC √ 转过90 沿ω3转过 °
方程不可解 方程可解 G C F E
D
vG = vB + vGB = vC + vGC = vG 大小 ? √ ? ? √ ? 方向 ? √ √ √ √ ?
● 重合点应选已知参数较多的点(一般为铰链点) 。 重合点应选已知参数较多的点(一般为铰链点) 选C点为重合点 点为重合点 v C 3 = v C 4 + v C 3C 4 ? ? 大小 ? 方向 ? √ √
c b
p
角速度 ω=vBA/LBA=v ab/l AB,顺时针方向 / , 同理 ω=v ca/l CA / ω=v cb/lCB / 因此 ab/AB=bc/BC=ca/CA / / / 于是 abc∽ABC
速度多边形 c b 速度极点 速度零点) (速度零点) C A
ω
a
B
p
●
●
●
●
速度多边形( 速度多边形(Velocity polygon)的性质 ) 联接p点和任一点的向量代表该点在 联接 点和任一点的向量代表该点在 机构图中同名点的绝对速度, 机构图中同名点的绝对速度 , 指向 C 为p→该点。 →该点。 A 联接任意两点的向量代表该两点 ω 机构图中同名点的相对速度, 在 机构图中同名点的相对速度 , 指向与速度的下标相反。 指向与速度的下标相反 。 如 bc代 代 a 表 vCB 而不是vBC 。 常用相对速度 而不是 来求构件的角速度。 来求构件的角速度。 abc∽ABC,称abc为ABC的速 ∽ , 为 的速 c 度影像( ) 度影像(Velocity image),两者相似 b 且字母顺序一致, 且字母顺序一致 , 前者沿 ω方向转 过90。 速度极点 极点p代表机构中所有速度为 速度极点 代表机构中所有速度为 零的点的影像。 零的点的影像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实际长度(m)
② 确定瞬心数目和位置 ③求解角速度
P24
a) 据同速点 P12
VP12
VP12 VB1 VB 2
1
B
1 q
2
C P23
P12 2 3 4
1 P 12 P 14 L 2 P 12 P 24 L
P 12 P 24 2 1 = P 12 P 14
P13
3
2
1
1VP12• P12 NhomakorabeaP23
V2 VP12 1 P 14 P 23 L
(方向向上)
可知 VK2VK3
因而K不是瞬心,只有 在连线上才能保证同方向。
[例1] 找出图示机构的瞬心
解:瞬心数目N=? N=6个
P23 P1 P13
P23
P1
2
2 1 3
1
•
P13
2
P14 4 VP13 1 P14 P12 P24 P13 2
P34
P23
P13
P14
P34
3 4 P 绝对?相对? 34
1-2-3 (P12P23) P13 1-4-3 (P34P14) P13
P24? (P12P14) P24 (P23P34) P24
[例2] 确定瞬心数目 N=? N=6
P13
P14
N=3
1
P12 B
2
A
P24
q1
3
D
P23
1
2
P13
3
P12
P23
4
C
P34
3
接触点法线 P12
(P13P23) P12
(P12P14) P24 (P12P23) P13
(P23P34) P24 (P34P14) P13
四、速度瞬心在机构速度分析中的应用 [例1]已知图示四杆机构各杆长、q1 及 1 ,求 2 及3
解:① 以长度比例尺 L 图示长度(m m) 作机构位置图
平面机构的运动分析
内 容
•运动分析目的和方法 •用速度瞬心法求机构的速度 •用矢量方程图解法求机构的速度和加速度
•复杂机构的速度分析
•用解析法求机构的速度和加速度
重
点
速度瞬心及“三心定理”的运用、矢量方程图 解法求一般机构的速度和加速度。
§1 运动分析目的和方法
目的:
确定机构的运动参数
(轨迹、位移、速度、加速度等)
P23 3
P34
2)没有联接关系的两构件
1)由运动副直接相联的两构件
回转副:回转副中心 移动副:垂直导轨无穷远处 纯滚动高副:接触点 一般高副:接触点公法线上
2)没有联接关系的两构件
三心定理: 三个构件的三个瞬心在一条直线上 证明(P23在P12P13线上) V K2 反证法: VK3
取P12P13连线外某重合点K,
(顺 )
P13 A P14
D P34
●
b) 据同速点 P13
VP13 VE1 VE 3
1 P 13 P 14 L 3 P 13 P 34 L
P 13 P 14 3 1 P 13 P 34
•曲柄滑块机构?
P24
=
(逆)
VP12
C
1
E P13
VP13
B
2 P12
方法:
图解法(瞬心法、矢量方程)
形象直观、繁琐精度低。
解析法(矢量方程、复数、矩阵等)
精度高、公式复杂、计算量大。
§2 用速度瞬心法分析机构的速度
一、速度瞬心的概念 速度瞬心 瞬时等速重合点(同速点)
B
1 VB
A
•
2
A
•
•
B
•
VA
VA2A1
VB2B1
P
绝对瞬心 VPij=0 相对瞬心 VPij0
P12 P21
瞬心Pij(i、j代表构件)
二、瞬心数目的确定
方法:计算或作图
N ( N 1) K 2
2
B 1 A 1
C 3
N—构件数
三、瞬心位置的确定
4 P12 2
P24 P 13 4
D
1)由运动副直接相联的两构件
回转副:回转副中心 移动副:垂直导轨无穷远处 纯滚动高副:接触点 一般高副:接触点公法线上 P14
•导杆机构?
1 q AP
P23 2 3 3 D P34
14
4
●
[例2]已知图示机构尺寸以及1逆时针 方向转动,求构件2的速度。
实际长度(m) 解:① 以长度比例尺 L 图示长度(m m) 作机构位置图
② 确定瞬心数目和位置 N=3 P12在高副法线上,同 时也在P13P23的连线上。 ③求构件2的速度
② 确定瞬心数目和位置 ③求解角速度
P24
a) 据同速点 P12
VP12
VP12 VB1 VB 2
1
B
1 q
2
C P23
P12 2 3 4
1 P 12 P 14 L 2 P 12 P 24 L
P 12 P 24 2 1 = P 12 P 14
P13
3
2
1
1VP12• P12 NhomakorabeaP23
V2 VP12 1 P 14 P 23 L
(方向向上)
可知 VK2VK3
因而K不是瞬心,只有 在连线上才能保证同方向。
[例1] 找出图示机构的瞬心
解:瞬心数目N=? N=6个
P23 P1 P13
P23
P1
2
2 1 3
1
•
P13
2
P14 4 VP13 1 P14 P12 P24 P13 2
P34
P23
P13
P14
P34
3 4 P 绝对?相对? 34
1-2-3 (P12P23) P13 1-4-3 (P34P14) P13
P24? (P12P14) P24 (P23P34) P24
[例2] 确定瞬心数目 N=? N=6
P13
P14
N=3
1
P12 B
2
A
P24
q1
3
D
P23
1
2
P13
3
P12
P23
4
C
P34
3
接触点法线 P12
(P13P23) P12
(P12P14) P24 (P12P23) P13
(P23P34) P24 (P34P14) P13
四、速度瞬心在机构速度分析中的应用 [例1]已知图示四杆机构各杆长、q1 及 1 ,求 2 及3
解:① 以长度比例尺 L 图示长度(m m) 作机构位置图
平面机构的运动分析
内 容
•运动分析目的和方法 •用速度瞬心法求机构的速度 •用矢量方程图解法求机构的速度和加速度
•复杂机构的速度分析
•用解析法求机构的速度和加速度
重
点
速度瞬心及“三心定理”的运用、矢量方程图 解法求一般机构的速度和加速度。
§1 运动分析目的和方法
目的:
确定机构的运动参数
(轨迹、位移、速度、加速度等)
P23 3
P34
2)没有联接关系的两构件
1)由运动副直接相联的两构件
回转副:回转副中心 移动副:垂直导轨无穷远处 纯滚动高副:接触点 一般高副:接触点公法线上
2)没有联接关系的两构件
三心定理: 三个构件的三个瞬心在一条直线上 证明(P23在P12P13线上) V K2 反证法: VK3
取P12P13连线外某重合点K,
(顺 )
P13 A P14
D P34
●
b) 据同速点 P13
VP13 VE1 VE 3
1 P 13 P 14 L 3 P 13 P 34 L
P 13 P 14 3 1 P 13 P 34
•曲柄滑块机构?
P24
=
(逆)
VP12
C
1
E P13
VP13
B
2 P12
方法:
图解法(瞬心法、矢量方程)
形象直观、繁琐精度低。
解析法(矢量方程、复数、矩阵等)
精度高、公式复杂、计算量大。
§2 用速度瞬心法分析机构的速度
一、速度瞬心的概念 速度瞬心 瞬时等速重合点(同速点)
B
1 VB
A
•
2
A
•
•
B
•
VA
VA2A1
VB2B1
P
绝对瞬心 VPij=0 相对瞬心 VPij0
P12 P21
瞬心Pij(i、j代表构件)
二、瞬心数目的确定
方法:计算或作图
N ( N 1) K 2
2
B 1 A 1
C 3
N—构件数
三、瞬心位置的确定
4 P12 2
P24 P 13 4
D
1)由运动副直接相联的两构件
回转副:回转副中心 移动副:垂直导轨无穷远处 纯滚动高副:接触点 一般高副:接触点公法线上 P14
•导杆机构?
1 q AP
P23 2 3 3 D P34
14
4
●
[例2]已知图示机构尺寸以及1逆时针 方向转动,求构件2的速度。
实际长度(m) 解:① 以长度比例尺 L 图示长度(m m) 作机构位置图
② 确定瞬心数目和位置 N=3 P12在高副法线上,同 时也在P13P23的连线上。 ③求构件2的速度