传感器作业
《传感器》作业4-7章答案
1、如何改善单组式变极距型电容传感器的非线性?答:对于变极距单组式电容器由于存在着原理上的非线性,所以在实际应用中必须要改善其非线性。
改善其非线性可以采用两种方法。
(1)使变极距电容传感器工作在一个较小的范围内(0.01μm至零点几毫米),而且最大△δ应小于极板间距δ的1/5—1/10。
(2)采用差动式,理论分析表明,差动式电容传感器的非线性得到很大改善,灵敏度也提高一倍。
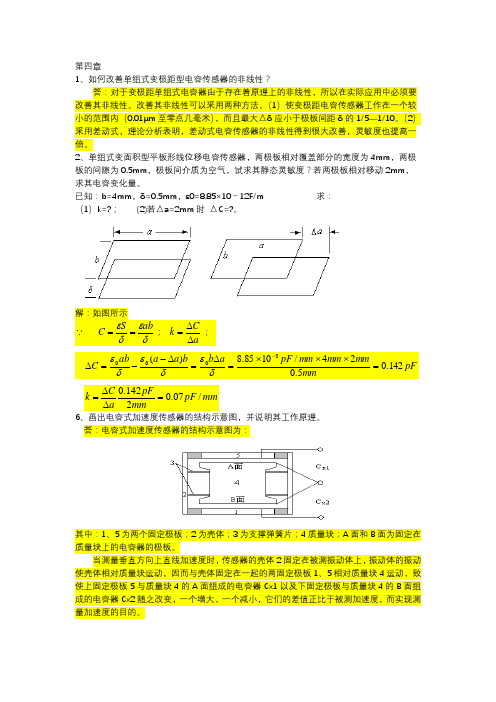
2、单组式变面积型平板形线位移电容传感器,两极板相对覆盖部分的宽度为4mm,两极板的间隙为0.5mm,极板间介质为空气,试求其静态灵敏度?若两极板相对移动2mm,求其电容变化量。
已知:b=4mm,δ=0.5mm,ε0=8.85×10-12F/m 求:(1)k=?;(2)若△a=2mm时△C=?。
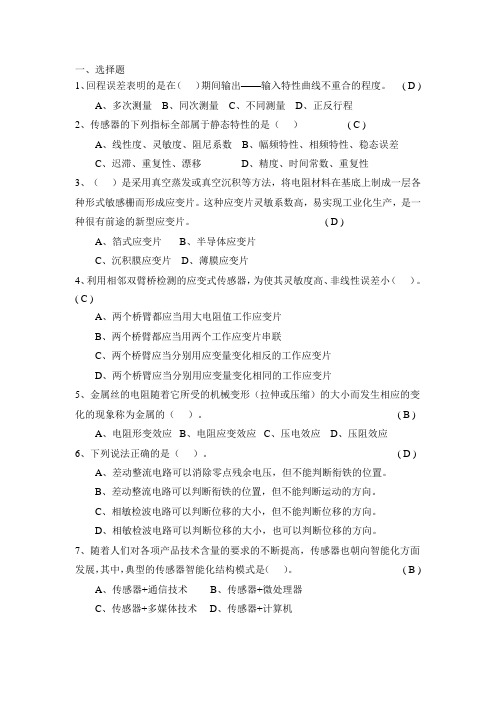
6、画出电容式加速度传感器的结构示意图,并说明其工作原理。
答:电容式加速度传感器的结构示意图为:其中:1、5为两个固定极板;2为壳体;3为支撑弹簧片;4质量块;A面和B面为固定在质量块上的电容器的极板。
当测量垂直方向上直线加速度时,传感器的壳体2固定在被测振动体上,振动体的振动使壳体相对质量块运动,因而与壳体固定在一起的两固定极板1、5相对质量块4运动,致使上固定极板5与质量块4的A面组成的电容器Cx1以及下固定极板与质量块4的B面组成的电容器Cx2随之改变,一个增大,一个减小,它们的差值正比于被测加速度,而实现测量加速度的目的。
1、某霍尔元件l 、b 、d 尺寸分别为1.0cm ×0.35cm ×0.1cm ,沿l 方向通以电流I =1.0mA ,在垂直于lb 面方向加有均匀磁场B=0.3T ,传感器的灵敏度系数为22V/A ·T ,试求其输出霍尔电动势及载流子浓度。
已知:l ×b ×d=1.0cm ×0.35cm ×0.1cm ;I =1.0mA ;B=0.3T ;k H =22V/A ·T ;求:U H =?;n=?解:如图IB IB V IB k U H H 33106.63.0100.122--⨯=⨯⨯⨯==2、试说明霍尔式位移传感器的输出U H 与位移x 成正比关系。
传感器作业(含答案)
一、选择题1、回程误差表明的是在()期间输出——输入特性曲线不重合的程度。
( D )A、多次测量B、同次测量C、不同测量D、正反行程2、传感器的下列指标全部属于静态特性的是()( C )A、线性度、灵敏度、阻尼系数B、幅频特性、相频特性、稳态误差C、迟滞、重复性、漂移D、精度、时间常数、重复性3、()是采用真空蒸发或真空沉积等方法,将电阻材料在基底上制成一层各种形式敏感栅而形成应变片。
这种应变片灵敏系数高,易实现工业化生产,是一种很有前途的新型应变片。
( D )A、箔式应变片B、半导体应变片C、沉积膜应变片D、薄膜应变片4、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
( C )A、两个桥臂都应当用大电阻值工作应变片B、两个桥臂都应当用两个工作应变片串联C、两个桥臂应当分别用应变量变化相反的工作应变片D、两个桥臂应当分别用应变量变化相同的工作应变片5、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
( B )A、电阻形变效应B、电阻应变效应C、压电效应D、压阻效应6、下列说法正确的是()。
( D )A、差动整流电路可以消除零点残余电压,但不能判断衔铁的位置。
B、差动整流电路可以判断衔铁的位置,但不能判断运动的方向。
C、相敏检波电路可以判断位移的大小,但不能判断位移的方向。
D、相敏检波电路可以判断位移的大小,也可以判断位移的方向。
7、随着人们对各项产品技术含量的要求的不断提高,传感器也朝向智能化方面发展,其中,典型的传感器智能化结构模式是()。
( B )A、传感器+通信技术B、传感器+微处理器C、传感器+多媒体技术D、传感器+计算机二、判断题线性测量系统的灵敏度是时间的线性函数。
( F )涡流传感器一般不能用来测量钢板厚度。
( F )电感式传感器根据结构形式可分为自感式和互感式两种。
( F )光生伏特效应属于内光电效应的一种。
( T )引用误差反映了一个检测装置的综合性能指标,用来作为检测仪表的分类标准。
传感器作业

《传感器与检测技术》第一章一.名词解释1、传感器2、转换元件3、敏感元件4、测量5、检测6、灵敏度7、测量方法8、测量误差9、分辨力10、绝对误差11、满度相对误差12、标称相对误差13、系统误差14、随机误差15、粗大误差16、直接测量17、间接测量18、线性度19、标定20、静态标定21、动态标定二.单项选择题1. 某压力仪表厂生产的压力表满度相对误差均控制在0.4%~0.6%,该压力表的精度等级应定为级.A. 0 .2B. 0 .5C. 1 .0D. 1.52. 某压力仪表厂生产的压力表满度相对误差均控制在0.4%~0.6%,一家仪器厂需要购买压力表,希望压力表的满度相对误差小于0.9%,应购买级的压力表。
A. 0 .2B. 0 .5C. 1 .0D. 1.53. 某采购员分别在三家商店购买100kg大米、10kg苹果、1kg巧克力,发现均缺少约0.5kg,但该采购员对卖巧克力的商店意见最大,在这个例子中,产生此心理作用的主要因素是。
A.绝对误差B.示值相对误差C.满度相对误差D.精度等级4. 在选购线性仪表时,必须在同一系列的仪表中选择适当的量程。
这时必须考虑到应尽量使选购的仪表量程为欲测量的左右为宜。
A.3倍B.10倍C.1.5倍D.0.75倍5.用万用表交流电压档(频率上限仅为5kHz)测量频率高达500kHz、10V左右的高频电压,发现示值还不到2V,该误差属于。
A.系统误差B.粗大误差C.随机误差D.动态误差6.用万用表交流电压档(频率上限仅为5kHz)测量5号干电池电压,发现每次示值均为1.8V,该误差属于。
A.系统误差B.粗大误差C.随机误差D.动态误差7.重要场合使用的元器件或仪表,购入后需进行高、低温循环老化试验,其目的是为了。
A.提高精度B.加速其衰老C.测试其各项性能指标D.提高可靠性8.有一温度计,它的测量范围为0~200℃,精度为0.5级,试求该表可能出现的最大绝对误差为。
传感器作业解答

第一次作业:1、什么叫传感器?它由哪几部分组成?它们的相互作用及相互关系如何?答:传感器是能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置。
通常,传感器由敏感元件和转换元件组成(如图1 所示)。
其中,敏感元件是指传感器中能直接感受或响应被测量的部分; 转换元件是指传感器中能将敏感元件感受或响应的被测量转换成适于传输或测量的电信号部分。
敏感元件的输入是被测的非电量,如温度、压力、位移、加速度等,敏感元件的输出就是转换元件的输入,转换元件的输出是电量,如电压、电流、电容、电阻等,输出信号的形式由传感器的原理确定。
比如在金属电阻应变式传感器中,应变片是敏感元件,电阻丝是转换元件。
由于传感器输出信号一般都很微弱,需要有信号调理与转换电路,进行放大、运算调制等, 信号调理转换电路以及传感器的工作必须有辅助的电源, 因此信号调理转换电路以及所需的电源都应作为传感器组成的一部分。
2、什么是传感器的静态特性?它有哪些性能指标?如何用公式表征这些性能指标?如何标定?答:传感器的静态特性是指被测量的值处于稳定状态时输出与输入的关系。
如果被测量是一个不随时间变化,或随时间变化缓慢的量,可以只考虑其静态特性, 这时传感器的输入量与输出量之间在数值上一般具有一定的对应关系,关系式中不含有时间变量。
对静态特性而言,传感器的输入量x 与输出量y 之间的关系通常可用一个如下的多项式表示: y =a 0+a 1x +a 2x 2+…+a n x n 式中:a 0——输入量x 为零时的输出量;a 1,a 2,…,a n —— 非线性项系数。
各项系数决定了静态特性曲线的具体形式。
传感器的静态特性一般用下述5个性能指标来描述,如灵敏度、 迟滞、线性度、重复性和漂移等。
1、灵敏度:传感器的灵敏度是输出量增量Δy 与引起输出量增量Δy 的相应输入量增量Δx 之比。
用S 表示灵敏度,它表示单位输入量的变化所引起传感器输出量的变化,很显然, 灵敏度S 值越大, 表示传感器越灵敏。
传感器作业(含答案)
一、选择题1、回程误差表明的是在()期间输出——输入特性曲线不重合的程度。
( D )A、多次测量B、同次测量C、不同测量D、正反行程2、传感器的下列指标全部属于静态特性的是() ( C )A、线性度、灵敏度、阻尼系数B、幅频特性、相频特性、稳态误差C、迟滞、重复性、漂移D、精度、时间常数、重复性3、()是采用真空蒸发或真空沉积等方法,将电阻材料在基底上制成一层各种形式敏感栅而形成应变片。
这种应变片灵敏系数高,易实现工业化生产,是一种很有前途的新型应变片。
( D )A、箔式应变片B、半导体应变片C、沉积膜应变片D、薄膜应变片4、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
( C )A、两个桥臂都应当用大电阻值工作应变片B、两个桥臂都应当用两个工作应变片串联C、两个桥臂应当分别用应变量变化相反的工作应变片D、两个桥臂应当分别用应变量变化相同的工作应变片5、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
( B )A、电阻形变效应B、电阻应变效应C、压电效应D、压阻效应6、下列说法正确的是()。
( D )A、差动整流电路可以消除零点残余电压,但不能判断衔铁的位置。
B、差动整流电路可以判断衔铁的位置,但不能判断运动的方向。
C、相敏检波电路可以判断位移的大小,但不能判断位移的方向。
D、相敏检波电路可以判断位移的大小,也可以判断位移的方向。
7、随着人们对各项产品技术含量的要求的不断提高,传感器也朝向智能化方面发展,其中,典型的传感器智能化结构模式是()。
( B )A、传感器+通信技术B、传感器+微处理器C、传感器+多媒体技术D、传感器+计算机二、判断题线性测量系统的灵敏度是时间的线性函数。
( F )涡流传感器一般不能用来测量钢板厚度。
( F )电感式传感器根据结构形式可分为自感式和互感式两种。
( F )光生伏特效应属于内光电效应的一种。
传感器·作业
第一章1-1 什么是测量值的绝对误差、相对误差、引用误差答:绝对误差是指测量值与真值的差,绝对误差是有正、负并有量纲的,即x L ∆=-相对误差分为:实际相对误差和标称相对误差:实际相对误差是指:绝对误差在真值中所占的百分比,即100%Lδ∆=⨯, 由于真值L 往往无法知道,相对误差常用标称相对误差。
标称相对误差是指:绝对误差在实际测量值中所占的百分比,即100%xδ∆=⨯。
引用误差是指:绝对误差在仪表满量程中所占的百分比,即100%γ∆=⨯-测量范围上限测量范围下线Δ——绝对误差;x ——测量值; L ——真值。
1-2 用测量范围为-50~150kPa 的压力传感器测量140kPa 压力时,传感器测得示值为142kPa ,求该示值的绝对误差、实际相对误差、标称相对误差和引用误差。
解:绝对误差 :x L ∆=-()1421402kPa =-= 实际相对误差:2100%100% 1.43%140L δ∆=⨯=⨯≈ 标称相对误差:2100%100% 1.41%142x δ∆=⨯=⨯≈引用误差:2100%100%1%15050γ∆=⨯=⨯=-+测量范围上限测量范围下线1-3 什么是系统误差系统误差可分为哪几类系统误差有哪些检验方法如何减小和消除系统误差答:在同一测量条件下,多次测量被测量时,绝对值和符号保持不变,或在条件改变时,按一定规律(如线性、多项式、周期性等函数规律)变化的误差称为系统误差。
分两种:前者为恒值系统误差,后者为变值系统误差。
系统误差的检验方法:1.实验对比法2.残余误差观察法3.准则检测法系统误差的减小和消除:1.在测量结果中进行修正2.消除系统误差的根源3.在测量系统中采用补偿措施4.实时反馈修正第二章2-1 什么叫传感器它有哪几部分组成它们的作用及相互关系如何1、传感器是一种以一定的精确度把被测量转换为与之确定对应关系的、便于应用的某种物理量的测量装置。
2、传感器由敏感元件、转换元件和辅助部件组成。
传感器第1~2章作业

1.某测量系统由传感器、放大器和记录仪组成,各环节的灵敏度为:S1=0。
2mV/℃、S2=2。
0V/mV、S3=5.0mm/V,求系统的总的灵敏度。
2.已知某压力传感器的测定范围为0~10000Pa,输入特性表示为:y= (x—0.00007x2+2000)请问这种传感器能使用吗?3.某位移传感器,在输入量变化5 mm时,输出电压变化为300 mV,求其灵敏度。
4.一台精度等级为0。
5级、量程范围为600-1200℃的温度传感器,它最大允许的绝对误差为多少?检验时某点最大绝对误差是4℃,问此表是否合格?5.图为一直流应变电桥,E = 4V,R1=R2=R3=R4=350Ω,求:①R1为应变片其余为外接电阻,R1增量为△R1=3.5Ω时,输出U0=?。
②R1、R2是应变片,感受应变极性大小相同,其余为固定电阻,电压输出U0=?。
③R1、R2感受应变极性相反,输出U0=?。
④R1、R2、R3、R4都是应变片,对臂同性,邻臂异性,电压输出U0=?。
6. 如果将100Ω电阻应变片贴在弹性试件上,若试件受力横截面积40.510S -=⨯m 2,弹性模量11210E =⨯N/m 2, 若有4510F =⨯N 的拉力引起应变电阻变化为1Ω。
求该应变片的灵敏度系数为多少?7. 一台用等强度梁作为弹性元件的电子秤,在梁的上下两面各贴两片相同的电阻应变片(K=2),如图a )所示.已知l=100mm ,b=11 mm ,h=3mm ,4210E =⨯N/ mm 2。
现将四个应变片接入 图b )所示直流桥路中,电桥电源电压U=6V 。
当F=0.5Kg 时,求电桥输出电压U 0=?。
8. 采用四片相同的金属丝应变片(K=2),将其贴在实心圆柱形测力弹性圆柱上。
如图所示a )所示,力F=1000Kg 。
圆柱断面半径r=1cm ,弹性模量7210E =⨯N/ cm 2,泊松比μ=0.3。
求:(1)画出应变片在圆柱上粘贴位置及相应测量桥路原理图;(2) 各应变片的应变?ε=,电阻相对变化量?R R∆= (3) 若供桥电压U=6V,求桥路输出电压U 0=?(4) 此种测量方式能否补偿环境温度对测量的影响?说明原因。
传感器作业及答案
作业3:3.问答题(1)什么是电阻的应变效应?利用应变效应解释金属应变式电阻传感器的工作原理。
答:金属导体在外力的作用下发生机械变形,其电阻值随着机械变形(伸长或缩短)的变化而发生变化,这种现象称为金属的应变效应。
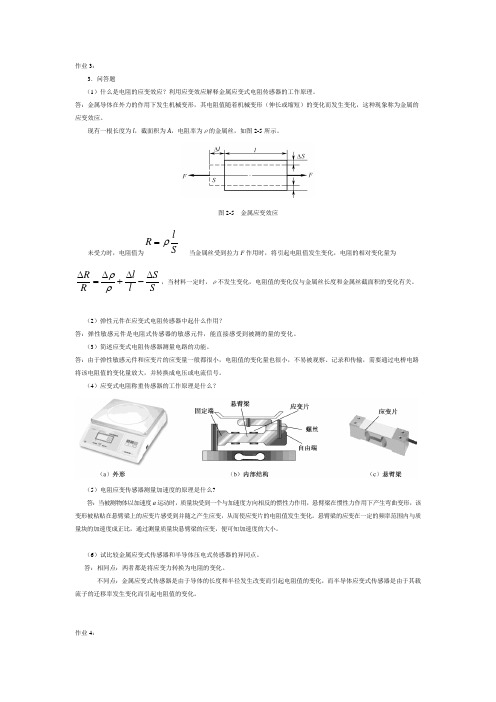
现有一根长度为l ,截面积为A ,电阻率为ρ的金属丝,如图2-5所示。
图2-5 金属应变效应 未受力时,电阻值为S l R ρ= 当金属丝受到拉力F 作用时,将引起电阻值发生变化,电阻的相对变化量为SS l l R R ΔΔΔΔ-+=ρρ,当材料一定时,ρ不发生变化,电阻值的变化仅与金属丝长度和金属丝截面积的变化有关。
(2)弹性元件在应变式电阻传感器中起什么作用?答:弹性敏感元件是电阻式传感器的敏感元件,能直接感受到被测的量的变化。
(3)简述应变式电阻传感器测量电路的功能。
答:由于弹性敏感元件和应变片的应变量一般都很小,电阻值的变化量也很小,不易被观察、记录和传输,需要通过电桥电路将该电阻值的变化量放大,并转换成电压或电流信号。
(4)应变式电阻称重传感器的工作原理是什么?(5)电阻应变传感器测量加速度的原理是什么?答:当被测物体以加速度a 运动时,质量块受到一个与加速度方向相反的惯性力作用,悬臂梁在惯性力作用下产生弯曲变形,该变形被粘贴在悬臂梁上的应变片感受到并随之产生应变,从而使应变片的电阻值发生变化。
悬臂梁的应变在一定的频率范围内与质量块的加速度成正比,通过测量质量块悬臂梁的应变,便可知加速度的大小。
(6)试比较金属应变式传感器和半导体压电式传感器的异同点。
答:相同点:两者都是将应变力转换为电阻的变化。
不同点:金属应变式传感器是由于导体的长度和半径发生改变而引起电阻值的变化,而半导体应变式传感器是由于其载流子的迁移率发生变化而引起电阻值的变化。
作业4:3.问答题(1)简述电容式传感器的工作原理。
答:两平行极板组成的电容器,如果不考虑边缘效应,其电容量为 式中,ε为极板间介质的介电常数,A 为两电极互相覆盖的有效面积,d 为两电极之间的距离。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
莫尔条纹是由主光栅和指示光栅的遮光与透光效应 形成的。主光栅用于满足测量范围和精度,指示 光栅用于拾取信号。将主光栅和指示光栅的刻划 面相向叠合并且使两者栅线有很小的交角 ,这 样可以看到,在a-a线上两只光栅栅线彼此错开, 光线从缝隙中透过形成光带,其透光部分是由一 系列菱形图案组成。在b-b线上两只光栅栅线彼此 交叠,相互遮挡缝隙,光线不能透过形成暗带。 这种亮带和暗带相互交替的条纹称为莫尔条纹。
传感器作业
如图所示,某生产线上的传送带放置有工件运行, 现要求用光纤传感器实现对工件的自动计数,试 给出设计方案,画出原理图,并加以说明。
如图所示,传送带的一 边放一个光源,另外一 边用光纤将接收到的光
传给光电二极管,当元
件移动时,接收的光的
强弱发生变化,经过
信号处理电路的处理, 数字面板就可以显示 工件的个数。
1.透射式光栅传感器的莫尔条纹是怎样 产生的?条纹间距,栅距和夹角的关系 是?
条的莫尔条纹放大倍 数是?
条纹间距:1/200=0.005 放大倍数
B K= =200B 0.005