双轮自平衡智能车行走伺服控制算法设计报告
双轮自平衡小车控制系统的设计
双轮自平衡小车控制系统的设计作者:张婷婷来源:《科学导报·学术》2020年第50期摘要:双轮自平衡小车具有高适应性、高灵活性、小面积、低功耗、长续航等优点,完全符合未来智能技术的前景方向,可推广于承载、运输、代步等众多民用、军用场合,有很大的发展潜力和市场前景,具有十分重要的研究意义。
为了实现平衡稳定性能的表现和速度的提升,本文以双轮小车为主要研究对象,通过对控制系统关键技术的研究,实现硬件系统及软件系统的设计,采集各种道路、倾角及速度数据,并利用单片机对有效信息进行融合,从而针对不同的工作环境,对双轮小车的驱动电机分别进行有效的控制,使其实现稳定、适应性强的双轮小车自平衡行驶。
关键词:平衡控制;多信息融合;车身稳定1 引言随着社会的发展和工作环境的复杂要求,人们对于可移动机器人的需求也越来越高,特别是在一些狭小或特定环境下的工作,需要可以实现灵活可变的移动轨迹,比如在原地零半径回转或者任意半径的转向。
双轮平衡小车是实现这类要求的一个重要载体,可以通过控制系统的运动控制,让小车在完美融合环境约束条件下进行无人干预的自平稳运行,同时可以抵抗干扰,迅速调整恢复稳定状态[1]。
然而控制系统也有各种各样的设计方案,不同的设计方案搭配合适的控制算法会产生出不一样的控制效果,最直观的是平衡稳定性能的表现和速度的提升,本文就控制系统的关键技术进行以下研究。
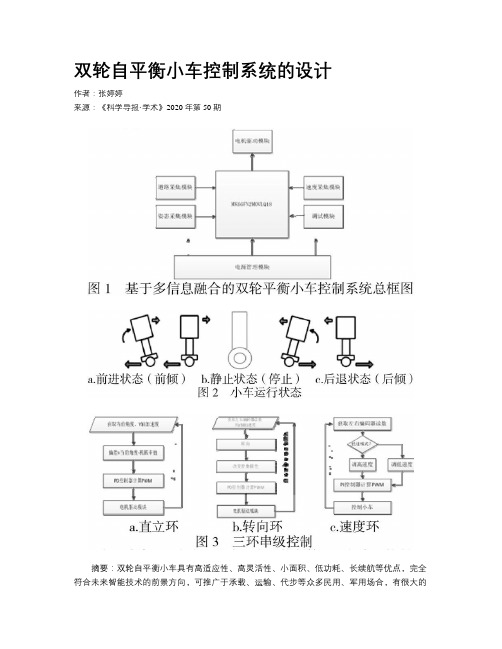
2 总体设计双轮自平衡小车是一个多反馈系统,通过对机械、硬件、软件等三方面的不断探索,本文确定了如图1所示的系统总框图。
系统总方案以主控模块、道路采集模块、姿态采集模块、速度检测模块、电机驱动模块、电源管理模块、调试模块等七大模块组成,从信号采集。
2.1 主控芯片系统采用性价比高的32位MK66FN2M0VLQ18为主控芯片(以下简称K66),K66有GPIO、ADC模数转换、PIT定时器、外部中断、PWM等外设,内含六个UART模块,三个SPI模塊,四个I2C模块与一个I2S模块,有足够的处理能力,可完成对各传感器采集信息的运算处理,以驱动电机模块。
双轮平衡车控制系统的设计

双轮平衡车控制系统的设计摘要随着时代的发展,人们生活质量的提高,双轮平衡车已经成为越来越流行的交通工具,目前双轮平衡车的发展已经成为未来交通工具发展的重要方向。
在实际使用中,双轮平衡车的反应速度,稳定性已是制衡双轮平衡车使用体验的最重要指标。
为双轮平衡车提供一种高效准确的运动控制系统成为了拓展其应用范围的前提。
本文是在基于嵌入式微处理器平台上,选择姿态传感器,设计了一种低成本、高性能、高准确性的双轮平衡车的控制系统。
本文首先从双轮平衡车的理论基础开始研究双轮平衡车的控制系统,依据现代受力分析和动能理论对车体进行数学建模,在数学模型的基础上设计合理的控制算法。
之后设计双轮平衡车机械结构,主要分为车轮、车架、电机等机械结构。
在设计平衡车硬件电路时,主要使用ARM结构的微处理器处理算法并且控制整体电路模块,使用高效的姿态传感器MPU6050采集车体的姿态信息,采用电机驱动芯片驱动电机。
最后编制双轮平衡车控制系统的程序,采用卡尔曼滤波算法对采集到的姿态信息进行抗干扰处理。
通过计算,主控制器输出PWM波驱动电机维持系统整体稳定并保持姿态平衡。
本次设计实现了抗干扰能力强和高效稳定的平衡车控制系统,该平衡车系统不仅平稳运行,并可以成功从不稳定状态恢复平衡,基本实现了基本功能。
本次设计可以使双轮平衡车这种交通工具更好的符合人们的日常需求。
关键词双轮平衡车;数学模型;PID控制;卡尔曼滤波- I -Design of the Control System ofDoubleWheel Balance CarAbstractWith the development of the times,people's living standards gradually improve.Thedouble wheel balance car has become amore popular part in modern transportation field.The response speed and stability of the two double balancecars has gradually become an important index of check and balance the double wheel balance vehicle technical performance. For the two-wheel balancing car provides an efficient and accurate motion control system became the premise of expanding the scope of its applicationThis paper is based on embedded microcontroller processor platform,choice attitude sensor, designed a low cost, high performance, high accuracy ofthedouble wheel balancing car control system.This paper begins with the theory of two wheel balancing car.According to modernforce analysis andenergy theory to design a mathematical model. According to the mathematical model todesign reasonable control algorithm. Second, design a Reasonable mechanical structure, including wheels, frame and motor. Now the most important thing is to design the hardware circuit. The ARM structure is used as the main control unit, it is mainly used for the operation and control of other units. Using an efficient attitude sensor to collect right attitude information, this paper select MPU6050 as the attitude sensor. Motor drive chip is used to drive two motors. Finally, this paper programs the two wheel balance control program. Filtering the collected information by Kaman filtering. After calculation, the main controller outputs the PWM wave to drive motor to maintain the overall balance of the car body.The double wheel balance car has Strong anti-interference ability.The double wheel balance car can maintain body balance, it can quickly restore balance.It accords with basic conditionsand greatly improves the stability of the whole system. Achieve the basic function;the double wheel balance car meets the People's daily life.- II -Keywords double wheel balance car; mathematic model; PID control; kalman filtering- III -目录摘要 (I)Abstract (II)第一章绪论 (1)1.1课题研究背景及意义 (1)1.2国内外双轮平衡车的发展现状 (2)1.3主要研究内容 (3)第二章系统总体设计及技术介绍 (5)2.1双轮平衡车总体设计方案 (5)2.2双轮平衡车受力分析以及动力学模型 (6)2.2.1双轮平衡车平衡的基本原理 (6)2.2.2车轮受力分析 (7)2.2.3车身受力分析 (9)2.2.4系统动能分析 (11)2.3PID控制算法 (16)2.3.1 PID控制系统简介 (16)2.3.2 PID控制算法原理 (16)2.4卡尔曼滤波算法 (22)2.4.1卡尔曼滤波简介 (22)2.4.2卡尔曼滤波原理 (23)2.4.3卡尔曼滤波实现 (24)2.5本章小结 (25)第三章系统硬件设计 (26)3.1双轮平衡车系统结构设计 (26)3.1.1平衡车机械机构设计 (26)3.1.2平衡车控制系统硬件设计方案 (27)3.2主控制器应用电路设计 (28)3.2.1Stm32处理器简介 (28)3.2.2主控制模块 (29)3.3无线通信模块电路设计 (30)3.3.1无线通信模块简介 (30)3.3.2无线通信模块 (31)3.4电源电路设计 (31)3.5硬件中的抗干扰措施 (33)3.6电机驱动电路设计 (33)3.7姿态传感器模块 (36)3.8本章总结 (38)第四章系统软件设计 (39)4.1软件设计总框图 (39)4.2电机测速方法 (41)4.2.1M法测速 (41)4.2.2T法测速 (42)4.3MPU6050通信程序 (42)4.4通信程序的设计 (43)4.5卡尔曼滤波程序设计 (44)4.6PID算法程序设计 (46)4.7本章小结 (47)第五章双轮自平衡车测试 (48)5.1双轮平衡车调试 (48)5.2PID控制系统测试 (48)5.3抗干扰试验 (50)5.4本章小结 (52)结论 (53)参考文献 (54)攻读硕士学位期间发表的学术成果 (57)致谢 (58)第一章绪论1.1课题研究背景及意义在当今世界,人们的交通方式的发展有着多样化的趋势,特别是时代的进步和发展,人们的交通工具已经不能只考虑速度、体积等方面,人们需要更可以用传感器反馈分析和智能控制和规划的自主交通工具[1]。
两轮自平衡车控制系统的设计与实现_周牡丹

4 | T echniques of Automation & Applications两轮自平衡车控制系统的设计与实现周牡丹,康 恺,蔡普郎,黄天健(厦门大学嘉庚学院电子工程系,福建 漳州 363105)摘 要:根据飞思卡尔智能车竞赛的要求,设计了基于MC9S12XS128单片机的两轮自平衡智能车控制系统。
介绍了该智能车系统的硬件模块电路设计、控制系统的构成及核心控制算法的实现。
在此基础上详细介绍了用于智能车直立控制、速度控制和方向控制的参数调试时简单易行的关键技术。
经过反复多次的实验表明,本文设计的两轮自平衡车控制系统性能可靠,在车身保持直立平衡的同时能够沿着赛道快速平稳运行.关键词:两轮自平衡车;PID控制;CCD路径检测;直立控制中图分类号:TP273 文献标识码:B 文章编号:1003-7241(2014)10-0004-05Design and Implementation of Two-WheeledSelf-Balancing Vehicle Control SystemZHOU Mu-dan, KANG Kai, CAI Pu-lang, HUANG Tian-jian( Dept.of Electronic Engineering, TKK College, Xiamen University, Zhangzhou 363105 China )Abstract: For Freescale smart car contest requirements, a two-wheeled self-balancing intelligent vehicle control system based onMC9S12XS128 is designed. This article introduces the design of the hardware module circuit, the structure of control system, and the implementation of the core control algorithm about the vehicle. The key technologies for debugging the upright control, speed control and direction control of the intelligent vehicle are also discussed in the paper. After repeated experiments , it shows that the design of the two-wheeled self-balancing vehicle control system is feasible and reliable. The vehicle can run quickly and smoothly along with the track while maintaining upright balance.Key words: two-wheeled self-balancing vehicle; PID control; CCD path detection; upright control收稿日期:2014-05-201 引言近年来,两轮自平衡电动车以其绿色节能、灵活便捷等优点而得到很大的发展。
基于单片机的两轮自平衡车控制系统设计
基于单片机的两轮自平衡车控制系统设计摘要两轮自平衡车是一种高度不稳定的两轮机器人,就像传统的倒立摆一样,本质不稳定是两轮小车的特性,必须施加有效的控制手段才能使其稳定。
本文提出了一种两轮自平衡小车的设计方案,采用重力加速度陀螺仪传感器MPU-6050检测小车姿态,使用互补滤波完成陀螺仪数据与加速度计数据的数据融合。
系统选用STC公司的8位单片机STC12C5A60S2为主控制器,根据从传感器中获取的数据,经过PID算法处理后,输出控制信号至电机驱动芯片TB6612FNG,以控制小车的两个电机,来使小车保持平衡状态。
整个系统制作完成后,小车可以在无人干预的条件下实现自主平衡,并且在引入适量干扰的情况下小车能够自主调整并迅速恢复至稳定状态。
通过蓝牙,还可以控制小车前进,后退,左右转。
关键词:两轮自平衡小车加速度计陀螺仪数据融合滤波PID算法Design of Control System of Two-WheelSelf-Balance Vehicle based on MicrocontrollerAbstractTwo-wheel self-balance vehicle is a kind of highly unstable two-wheel robot. The characteristic of two-wheel vehicle is the nature of the instability as traditional inverted pendulum, and effective control must be exerted if we need to make it stable. This paper presents a design scheme of two-wheel self-balance vehicle. We need using gravity accelerometer gyroscope sensor MPU6050 for the inclination angle of vehicle, and using complementary filter for the data fusion of gyroscope and accelerometer. We choose an 8-bit microcontroller named STC12C5A60S2 from STC Company as main controller of the control system. The main controller output control signal, which is based on the data from the sensors, to the motor drive chip named TB6612FNG for controlling two motors of vehicle, and keeping the vehicle in balance. After the completion of the control system, the vehicle can achieve autonomous balance under the conditions of unmanned intervention, the vehicle can adjust automatically and restored to a stable state quickly in the case of giving appropriate interference as well. In addition, we can control the vehicle forward, backward and turn around.Key words: Two-Wheel Self-Balance Vehicle; Accelerometer; Gyroscope; Data fusion; Complementary filter; PID algorithm1 绪论 (1)1.1自平衡小车的研究背景 (1)1.2 自平衡小车研究意义 (1)1.3 论文的主要内容 (2)2 课题任务与关键技术 (2)2.1 主要任务 (2)2.2关键技术 (2)2.2.1 系统设计 (2)2.2.2 数学建模 (2)2.2.3姿态检测 (3)2.2.4 控制算法 (3)3 系统原理分析 (3)3.1 控制系统任务分解 (3)3.2 控制原理 (4)3.3 数学模型 (5)4 系统硬件设计 (6)4.1 STC12C5A60S2单片机介绍 (7)4.2 电源管理模块 (8)4.3 车身姿态感应模块 (9)4.3.1 加速度计 (10)4.3.2 陀螺仪 (12)4.4 电机驱动模块 (14)4.5 速度检测模块 (16)5 系统软件设计 (16)5.1 软件系统总体结构 (17)5.2 单片机的硬件资源配置 (18)5.2.1定时/计数器设置 (18)5.2.2 PWM输出设置 (20)5.2.3 串行通信设置 (23)5.2.4 中断的开放与禁止 (26)5.3 MPU6050资源配置 (27)5.3.1 普通IO口模拟IIC通讯 (28)5.3.2 MPU6050资源配置 (32)5.4 系统控制算法设计 (34)5.4.1 PID算法 (34)5.4.2 互补滤波算法 (35)5.4.3 角度控制与速度控制 (35)5.4.4 输出控制算法 (36)6 总结与展望 (37)6.1 总结 (37)6.2 展望 (37)参考文献 (38)1 绪论1.1自平衡小车的研究背景近几年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前机器人研究领域的一个重要组成部分,并且其应用领域日益广泛,其所需适应的环境和执行的任务也更复杂,这就对移动机器人提出了更高的要求。
两轮自平衡小车设计报告

两轮自平衡小车设计报告设计报告:两轮自平衡小车一、引言二、设计理念本设计希望实现一个简洁、稳定和高效的两轮自平衡小车。
考虑到小车需要快速响应外界环境变化,并迅速做出平衡调整,因此采用了传感器、控制器和执行机构相结合的设计思路。
通过传感器获取小车倾斜角度和加速度等数据,通过控制器对采集的数据进行处理和判断,并通过执行机构实时调整车身的倾斜角度,以实现平衡行走。
三、原理四、硬件结构1.车身结构:车身由两个电机、一个控制器、一个电池和一个平衡摆杆组成。
2.电机:采用直流无刷电机,具有较高的转速和输出功率。
3.控制器:采用单片机控制模块,能够对传感器数据进行处理和判断,并输出控制信号给电机。
4.传感器:主要包括陀螺仪、加速度计和倾斜传感器,用于感知小车的倾斜角度和加速度等数据。
5.电池:提供小车的电力供应,保证小车正常运行。
五、软件控制小车的软件控制主要包括数据处理和判断、控制信号生成和输出三个方面。
1.数据处理和判断:通过获取的传感器数据,包括倾斜角度和加速度等信息,根据预设的控制算法进行数据处理和判断。
2.控制信号生成:根据处理和判断得出的结果,生成相应的控制信号。
控制信号包括电机的转动方向和速度。
3.控制信号输出:将生成的控制信号输出给电机,实现倒立摆的平衡。
六、小车性能测试为了验证小车的设计和功能是否符合预期,进行了多项性能测试。
1.平衡行走测试:将小车放在平坦的地面上,通过传感器检测到小车的当前倾斜角度并进行调整,实现小车的自平衡行走。
2.转向测试:在平衡行走的基础上,通过控制信号调整两个电机的速度差,从而实现小车的转向。
3.避障测试:在平衡行走和转向的基础上,添加超声波传感器等避障装置,实现小车的避障功能。
七、总结通过本设计报告的详细介绍,我们可以看出两轮自平衡小车具备平衡行走、转向和避障等功能,为用户提供了一个稳定、高效的移动平台。
未来,我们将进一步优化小车的设计和控制算法,提高小车的性能和应用范围。
两轮机器人自平衡行走控制系统设计
E L E C T R I C D R I V E 2 O 1 3 V o 1 . 4 3 N o . 1 2
两 轮 机 器人 白平 衡 行ห้องสมุดไป่ตู้ 控 制 系 统 设计
胡 凌燕 , 万鹏 , 刘小平, 徐 少平 , 徐刚 , 陈明伟 , 高青 ( 南 昌大学 信 息工程 学 院, 江西 南 昌 3 3 0 0 3 1 )
速度及倾角这两个耦合变量的控制 , 而且具有较强的抗干扰能力。该 控制方法还具备 了传统 P I D控制器不依 赖精确模型 、 实现简单 、 参数整定方便 、 鲁棒性强等优点。 关键词 : 两轮机器人 ;双 回路 P I D 控制 ;卡尔曼滤波 ; 平衡控制 中图分类号 : T P 1 3 文献标识码 : A
Ab s t r a c t : T wo - wh e e l e d r o b o t i s a mu l t i - v a r i a b l e , h i g h e r - o r d e r n o n — l i n e a r , s t r o n g c o u p l i n g s y s t e m. A n o v e l d o u b l e - l o o p P I D c o n t r o l me t h o d w a s p r e s e n t e d ,a n d t h e c o n t r o l s y s t e m f o r t h e t wo — w h e e l e d r o b o t w a s d e s i g n e d . T h e r e a l — t i me i n c l i n a t i o n o f r o b o t wa s me a s u r e d b y f u s i n g t h e g y r o s i g n a l wi t h a c c e l e r o me t e r s i g n a l wi t h a Ka lma n i f l t e in r g me t h o d . T h e s p e e d o f山e r o b o t wa s me a s u r e d wi t h e n c o d e  ̄. T h e d o u b l e l o o p P I D c o n t r o l l e r c o mb i n e d p o s i t i v e f e e d b a c k w i t h n e g a t i v e f e e d b a c k c o n t r o l l e r . T h e s u m o f i n c l i n a t i o n n e g a t i v e f e e d b a c k a n d s p e e d p o s i t i v e ̄e d b a e k we r e o u t p u t t o c o n t r o l t h e r o b o t b la a n c e a n d wa l k i n g wi t h a c e r t a i n e x p e c t e d s p e e d . Ac t u l a e x p e ime r n t s s h o w t h a t t h e d o u b l e - l o o p P I D c o n t r o l me t h o d c a n ma k e t wo — w h e e l e d r o b o t w a l k i n g s mo o t h i n a c c o r d a n c e w i t h t h e e x p e c t e d s p e e d a n d he t s y s t e m h a s a g o o d a n t i . i n t e f r e r e n c e p e f r o r ma n c e . T h e c o n t r o l me t h o d a l s o h a s t h e a d v a n t a g e s o f t r a d i t i o n l a P I D c o n t r o l l e r , wh i c h d o e s n o t r e l y o n a n a c c u r a t e mo d e l , e a s y t o i mp l e me n t a n d p a r a me t e r s e t t i n g ,a n d h a s s t r o n g r o b u s t n e s s . Ke y wo r d s : t w o — wh e e l e d;d o u b l e — l o o p P I D; Ka l ma n i f l t e r ;b la a n c e c o n t r o l
两轮自平衡车控制系统的设计与实现

两轮自平衡车控制系统的设计与实现一、自平衡车系统概述1、定义自平衡车是一种以双轮直立结构/双轮平移结构的小型无线遥控电动车,最初由电动车作为主要的运动机构,但也有可能有其他特殊机构,进行实时控制,使其能够在平衡和模式控制下,保持水平稳定态,实现自动平衡、自主康复和自由行走。
2、系统功能自平衡车系统的功能是通过实时控制平衡并实现模式控制,使自平衡车实现自动平衡、自主康复和自由行走,从而达到智能化的操作目的,解决双轮自行车无主动平衡功能的问题。
二、系统设计1、硬件系统自平衡车的硬件系统由电池、ESC(电子转向控制器)、遥控组件、周边传感器组件、电路板组件等构成。
2、软件系统自平衡车的控制系统主要由ARMCortex-M0 MCU、单片机程序、PID算法组成。
三、系统实现1、硬件系统实施(1)第一步,在自平衡车上安装ESC,ESC的电池由智能充电器连接,使自平衡车进行自动充电;(2)第二步,给控制器方向键插上遥控器,使用户可以控制车辆移动;(3)第三步,在车辆上安装多个传感器,在控制板上增加芯片,使用户可以对车辆进行实时监测;(4)第四步,在控制板上安装一个ARM Cortex-M0 MCU处理器,将控制算法由单片机程序烧录形成可控制的处理系统。
2、软件系统实施(1)随着ARM处理器的安装,自平衡车可以被SONI的特殊的烧录器进行烧录,该程序可以控制车辆的转向和速度;(2)安装完毕后,需要建立多个变量从传感器接受数据,读取车辆的平衡状态,并控制车辆前后左右的运动;(3)最后,我们选择PID算法来实现车辆实时的控制,根据车辆当前的实际情况,调节PID距离和速度增量使自平衡车实现实时的模式控制。
四、结论本文介绍了自平衡车控制系统的设计思想和实现步骤,通过控制平衡,实现自动平衡、自主康复和自由行走,使得自平衡车有更多的功能,在以后的应用中,自平衡车的研究和应用实际会有很大的推动作用。
两轮自平衡小车控制系统的设计

两轮自平衡小车控制系统的设计摘要:介绍了两轮自平衡小车控制系统的设计与实现,系统以飞思卡尔公司的16位微控制器MC9S12XS128MAL作为核心控制单元,利用加速度传感器MMA7361测量重力加速度的分量,即小车的实时倾角,以及利用陀螺仪ENC-03MB测量小车的实时角速度,并利用光电编码器采集小车的前进速度,实现了小车的平衡和速度控制。
在小车可以保持两轮自平衡前提下,采用摄像头CCD-TSL1401作为路径识别传感器,实时采集赛道信息,并通过左右轮差速控制转弯,使小车始终沿着赛道中线运行。
实验表明,该控制系统能较好地控制小车平衡快速地跟随跑道运行,具有一定的实用性。
关键词:控制;自平衡;实时性近年来,随着经济的不断发展和城市人口的日益增长,城市交通阻塞以及耗能、污染问题成为了一个困扰人们的心病。
新型交通工具的诞生显得尤为重要,两轮自平衡小车应运而生,其以行走灵活、便利、节能等特点得到了很大的发展。
但是,昂贵的成本还是令人望而止步,成为它暂时无法广泛推广的一个重要原因。
因此,开展对两轮自平衡车的深入研究,不仅对改善平衡车的性价比有着重要意义,同时也对提高我国在该领域的科研水平、扩展机器人的应用背景等具有重要的理论及现实意义。
全国大学生飞思卡尔智能车竞赛与时俱进,第七届电磁组小车首次采用了两轮小车,模拟两轮自平衡电动智能车的运行机理。
在此基础上,第八届光电组小车再次采用两轮小车作为控制系统的载体。
小车设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械及能源等多个学科的知识。
1 小车控制系统总体方案小车以16位单片机MC9S12XS128MAL作为中央控制单元,用陀螺仪和加速度传感器分别检测小车的加速度和倾斜角度[1],以线性CCD采集小车行走时的赛道信息,最终通过三者的数据融合,作为直流电机的输入量,从而驱动直流电机的差速运转,实现小车的自动循轨功能。
同时,为了更方便、及时地观察小车行走时数据的变化,并且对数据作出正确的处理,本系统调试时需要无线模块和上位机的配合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理课程设计目录一.引言 (4)二.系统模型的建立 (4)三.系统控制的优化 (9)3.1 PID调节参数的优化 (9)3.2 积分分离PID的应用 (13)四,结语 (16)双轮自平衡智能车行走伺服控制算法摘要:全国第八届“飞思卡尔”智能汽车大赛已经结束。
光电组使用大赛提供的D车模,双轮站立前进,相对于以前的四轮车,双轮车的控制复杂度大大增加。
行走过程中会遇到各种干扰,经过多次的实验,已经找到了一套能够控制双轮车的方法。
双轮机器人已经广泛用于城市作战,排爆,反恐,消防以及空间消防等领域。
实验使用单片机控制双电机的转速,达到了预期的效果。
关键词:自平衡;智能;控制算法Motion Servo Control Algorithm for DualWheel Intelligent CarAbstract: The 8th freescale cup national Intelligent Car competition of has been end.The led team must used D car which has only 2tires.It is more difficult to control prefer to control A car which has 4tires.There is much interference on the track. A two-wheeled robots have been widely used in urban warfare, eod, counter-terrorism, fire control and space fire control and other fields。
We has searched a good ways to control it.We used MCU to control the speed of motors and get our gates.Key Words: balance by self; intelligent; control algorithm一.引言双轮自平衡车是智能汽车中一个重要的组成部分。
由于其是两轮站立,在很多场合有比四轮车更灵活,更方便控制的特点。
基于双轮车的机器人已经用于在城市作战,排爆,反恐,消防,空间探测等领域。
双轮自平衡车的控制过程与倒立摆相似。
本次研究主要是对双轮车直立的研究。
由于车在前进过程中还可能遇到弯道和路障,所以本文还对整个系统的稳定性做了比较深入的研究。
在理论证明正确的前提下,再次进行仿真验证,仿真验证的结果与实验结果相符合。
二.系统模型的建立智能汽车竞赛使用的是D车模。
D 车模是双电机,双轮的车模。
单电机控制双轮时可以满足车身保持平衡和前进的要求,而之所以使用双电机是为了前进过程中转弯的需要。
本文只讨论跟直立和干扰有关的内容,鉴于此,本文余下内容默认是单电机控制的车模。
自平衡车在没有电机控制的情况下属于不稳定系统,在极小的干扰下,就会偏离平衡位置而失去平衡。
因此,控制系统必须使用反馈控制。
图1是站立在赛道上的双轮车模。
图1 站立在赛道上的自平衡双轮车自平衡双轮车在只研究直立的情况下与倒立摆相似,因此这里将借助倒立摆的研究方式研究双轮车的平衡控制。
控制车模平衡的主观经验。
一般的人通过简单练习就可以让一个直木棒在手指尖上保持直立。
这需要两个条件:一个是托着木棒的手可以移动;另一个是眼睛可以观察到木棒的倾斜角度和倾斜趋势(角速度)。
通过手掌移动抵消木棒的倾斜角和趋势,从而保持直立。
这两个条件缺一不可,实际上就是控制中的负反馈控制,见图2。
图2 在手上不倒的木棍世界上没有一个天才杂技演员可以蒙着双眼使得木棒在自己指尖上直立,因为没了双眼就没了负反馈的环节。
经过简单的分析可以得到图3所示的控制结构图。
图3 不倒的木棍的控制结构图同样,双轮直立车的控制也是通过负反馈来实现的,与上面保持木棍直立则比较简单。
因为车模有2个轮子着地,车体只会在轮子滚动的防线上发生倾斜。
控制轮子转动,抵消在一个维度上倾斜的趋势便可以保持车体的平衡了。
如图4,5, 6所示。
图4 车体平衡,车轮静止图5 车体后倾,车轮向后加速图6 车体前倾,车体向前加速将双轮车简化成高度为L,质量为m的简单倒立摆,它可以放置在左右移动的车轮上。
与空气中的单摆类似,车身偏离平衡位置后要想能迅速的回到平衡位置,车身应该受到与位移方向相反的的回复力。
在平衡点附近,角度θ很小,即有sinθ≈θ。
假设车身偏离平衡角度后,将受到电机产生的与角度成比例的力:f = mk1θ(1)由于重力原因,车身偏离平衡位置后受到的回复力为:F = mgθ– mk1θ(2)从上式中可以看出回复力要想与位移相反,必须有k1 > g。
假设外力干扰引起车模产生角速度x(t)。
沿着垂直于车模底盘的方向进行受力分析,可以得到车模倾角与车轮加速度a(t)以及外力干扰加速度x(t)之间的的运动方程。
受力分析如图7所示。
图7 车模受力分析(4)车模静止不向前运动时,a(t) = 0,即:(5)对应车模静止时,系统输入输出的传递函数为:(6)此时系统具有2个极。
一个极点位于s平面的右半平面,车模不稳定。
在此处假设,k1 = 20用matlab仿真此系统:Matlab代码如下:%程序目的:在没有微分量的情况下仿%真系统的阶跃响应%author:程顺均%时间:2013.8.28sys = tf([1], [1 0 100]);t = 0:0.01:3;figure(1)step(sys,t);grid on仿真截图如图8所示:0.0020.0040.0060.0080.010.0120.0140.0160.0180.02Time (sec)Amplitude图8 比例控制系统的阶跃响应从图来看,与分析结果一样,系统的阶跃响应为等幅振荡,不稳定。
原因是在阶跃响应中没有阻尼,也就是说实际中的车不会倒向一边,而是在平衡位置附近来回震荡。
这显然不是我们需要得到的效果。
因此在系统中我们加入为微分量,也就是阻尼。
在实际中变现为阻碍车模转动的力,类似于摩擦阻力,大小方向与车身角速度有关。
即阻力(7)经过拉式变换,得到带阻尼的系统的控制结构图,如图9所示:图9 加入比例微分反馈控制的系统系统传递函数为:(8)此时系统的极点为:(9)根据自动控制原理稳定性分析知识知道,只有系统的2个极点都在s平面的左半平面时系统才是稳定的。
因此系统必须满足。
假设k2 = 0.5,k1 = 20。
利用matlab仿真。
仿真代码如下:%程序目的:在比例微分控制的情况下仿%真系统的阶跃响应%author:程顺均%时间:2013.8.28sys = tf([1],[1,5,100]);t = 0:0.01:3;figure(1)step(sys,t);grid on;title('比例微分控制时的阶跃响应');阶跃响应曲线如下:0.0050.010.015Time (sec)Amplitude图10 比例微分控制的阶跃响应曲线从响应的曲线来看比例—微分控制曲线能够比较收敛下来。
在宏观看来,就是车身能够很快到我们需要的角度,而不是一直在设定角度的前后震荡。
研究到此也智能算是解决了直立控制的问题。
在实际中往往有很多干扰因素,例如飞思卡尔竞赛中赛道上就设有比赛道高的路障。
如果稳定性较差的直立车在通过路障的时候,会直接倒下。
假设干扰信号为D(s),D(s)与的关系为:(10)这里我们把路障一类的干扰看成是脉冲干扰,D(s) = 1。
仿真参数不变,对干扰进行一次仿真。
仿真代码如下:%程序目的:仅在干扰下的输出响应 %author:程顺均 %时间:2013.8.28sys = tf([0.1 0 -10],[0.1 0.2 10]); t = 0:0.2:10; figure(1); impulse(sys,t); gird on;仿真截图如图11所示:Time (sec)A m p l i t u d e图11 系统对脉冲干扰的响应 从仿真的图来看,脉冲干扰会让本来已经稳定的系统来回的震荡,在多次震荡后才回到比较稳定的状态。
因此比例-微分控制的方式能够满足我们的要求。
对于一个系统来讲,能够稳定下来并不是我们追求的最终目标。
接下来将详细研究系统的优化和稳定性。
三.系统控制的优化飞思卡尔智能汽车竞赛中评比成绩是以在赛道上跑一圈的时间为唯一依据的。
这要求车在保持稳定的前提下以最大的速度前进。
系统的响应时间,抗干扰能力都是需要反复调整的。
快的调整时间,小的超调量,高的稳定性都是我们期望的结果。
3.1 PID 调节参数的优化一般的系统我们都需要短的调节时间,小的超调量。
往往我们是不能两方面做到极限,但是通过PID 参数的调节,我们可以得到一个满意的调节过程。
为了研究每个参数的意义,先进行单参数的研究。
P 一般是作为比例项,决定了系统的部分响应速度。
在这里我们使用一个仿真代码完成这个仿真。
仿真代码见附件1:Kp的研究通过改变系统的Kp,可以得到一系列的仿真图。
这里选取4组做研究。
分别为100,400,1000,2000。
仿真图如图12,13,14,15所示。
图12 Kp = 100时的阶跃响应图13 Kp = 400时的阶跃响应图14 Kp = 1000时的阶跃响应图15 Kp = 2000时的阶跃响应为了方便对比出他们的不同,这里将他们的响应特征列表出来,如表1所示。
从表的的数据和调整图像来看,Kp的值很小的时候,系统的第一次上升达不到我们需要的值,需要积分项才能弥补。
这不是我们需要的结果。
而当Kp值很大的时候,上升时间缩短,超调量也会增大。
因此Kp值得选择主要影响了系统的响应能力。
Ki的研究PID中的I是积分项,主要是消除稳态误差。
下面通过4组不同的参数的测试研究其作用。
Ki的值为100,400,1000,2000的时候的值仿真图如图15,16,17,18所示。
图16 Ki=100的稳态误差图17 Ki=400的稳态误差图18 Ki=1000的稳态误差图19 Ki=2000的稳态误差从图像可以看出来,其上升速度和超调量并无太大的差异。
他们的差异主要体现在稳态误差上了。
将四组仿真的稳态误差在1.5S时取值列表得表2。
从表的数据很明显的可以看出,增大Ki值可以减小稳态误差。
但是由于系统会受到一些小的干扰,所以Ki的值也并不是越大越好!Kd的研究在PID调节中微分项起预见作用,在系统靠近预期值时可以减小控制输入量,进而减小超调量,增强系统的性能。
下面同样通过4组数据研究Kd 值对系统的影响。
Ki分别为10,20,40,60时的仿真图如图20,21,22,23所示。