霍尔元件测速原理说明书及应用
霍尔转速传感器测速实验

实验九霍尔转速传感器测速实验一、实验目的了解霍尔转速传感器的应用。
二、基本原理根据霍尔效应表达示U H=K H IB,当K H I不变时,在转速圆盘上装上N只磁性体,并在磁钢上方安装一霍尔元件。
圆盘每转一周,表面的磁场B从无到有就变化N次,霍尔电势也相应变化N次。
此电势通过放大、整形和计数电路就可以测量被测旋转体的转速。
三、需用器件与单元霍尔转速传感器、转速测量控制仪。
四、实验步骤1、根据图9-1,将霍尔转速传感器装于转动源的传感器调节支架上,探头对准转盘内的磁钢。
图9-1 霍尔转速传感器安装示意图2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、绿( ),不要接错。
3、将霍尔传感器输出端(黄线)接示波器或者频率计。
4、调节电动转速电位器使转速变化,用示波器观察波形的变化(特别注意脉宽的变化),或用频率计观察输出频率的变化。
五、实验结果分析与处理1、记录频率计六组输出频率数值如下:由以上数据可得:最快转速对应的频率f1=152.83Hz,最慢转速对应频率f6=20.1Hz。
随着转速的减小,脉宽T1逐渐变大,但占空比基本保持不变,而且速度不能无限减小。
六、思考题1、利用霍尔元件测转速,在测量上是否有所限制?答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。
2、本实验装置上用了二只磁钢,能否只用一只磁钢?答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。
1。
霍尔传感器工作原理及其应用

| [<<] [>>]差动霍尔电路制成的霍尔齿轮传感器,如图 1 所示,新一代的霍尔齿轮转速传感器,广泛用于新一代的汽车智能发动机,作为点火定时用的速度传感器,用于 ABS (汽车防抱死制动系统 ) 作为车速传感器等。
在 ABS 中,速度传感器是十分重要的部件。
ABS 的工作原理示意图如图 2 所示。
图中,1 是车速齿轮传感器; 2 是压力调节器; 3 是控制器。
在制动过程中,控制器 3 不断接收来自车速齿轮传感器 1 和车轮转速相对应的脉冲信号并进行处理,得到车辆的滑移率和减速信号,按其控制逻辑及时准确地向制动压力调节器2发出指令,调节器及时准确地作出响应,使制动气室执行充气、保持或者放气指令,调节制动器的制动压力,以防止车轮抱死,达到抗侧滑、甩尾,提高制动安全及制动过程中的可驾驭性。
在这个系统中,霍尔传感器作为车轮转速传感器,是制动过程中的实时速度采集器,是 ABS 中的关键部件之一。
在汽车的新一代智能发动机中,用霍尔齿轮传感器来检测曲轴位置和活塞在汽缸中的运动速度,以提供更准确的点火时间,其作用是别的速度传感器难以代替的,它具有如下许多新的优点。
( 1 ) 相位精度高,可满足0.4°曲轴角的要求,不需采用相位补偿。
( 2) 可满足 0.05 度曲轴角的熄火检测要求。
( 3) 输出为矩形波,幅度与车辆转速无关。
在电子控制单元中作进一步的传感器信号调整时,会降低成本。
用齿轮传感器,除可检测转速外,还可测出角度、角速度、流量、流速、旋转方向等等。
图 1 霍 尔速 度传 感 器 的 内 部 结 构1. 车 轮 速度传 感 器2. 压 力 调 节 器3. 电 子 控 制 器图 2ABS 气 制 动 系 统 的 工 作 原 理 示 意 图按 图 3 所 示 的 各 种 方 法 设 置磁 体 ,将 它们 和 霍 尔 开 关 电 路 组合 起 来 可 以 构 成 各 种 旋 转 传 感 器 。
霍尔传感器测速原理
霍尔传感器测速原理
霍尔传感器测速原理是利用霍尔效应来实现的。
霍尔效应是指当通过一段导电材料的电流受到磁场的影响时,材料两侧产生的电势差会发生变化的现象。
基于这个原理,霍尔传感器通常由霍尔元件、磁场源和信号处理电路组成。
在测速应用中,霍尔传感器通常被安装在待测物体的周围,例如发动机的曲轴或车轮上。
当待测物体运动时,霍尔传感器感知到磁场变化,从而产生一个与物体运动速度成正比的电压信号。
具体测速原理如下:
1. 磁场源: 磁场源通常是一个永磁体,它会产生一个稳定的磁场。
待测物体经过磁场源时,磁场的强度会发生变化。
2. 霍尔元件: 霍尔元件是一种特殊的半导体元件,它具有灵敏的磁场感知能力。
当霍尔元件周围的磁场强度发生变化时,霍尔元件内部会产生电势差。
3. 信号处理电路: 霍尔元件的电势差会通过信号处理电路进行放大、过滤和转换。
最终,信号处理电路将电势差转换为与待测物体速度成正比的电压信号。
通过测量输出电压的变化,我们可以计算出待测物体的速度。
通常,这个电压信号会通过连接到微控制器或其他外部设备的输出引脚进行进一步处理和使用。
需要注意的是,为了确保准确的测速结果,霍尔传感器的位置和磁场源的设置需要仔细考虑和校准。
此外,在实际应用中,还需要考虑到可能存在的电磁干扰和其他因素对测速结果的影响。
因此,在使用霍尔传感器进行测速时,需要进行适当的验证和校准工作,以确保测量结果的准确性。
霍尔传感器测速原理图和程序
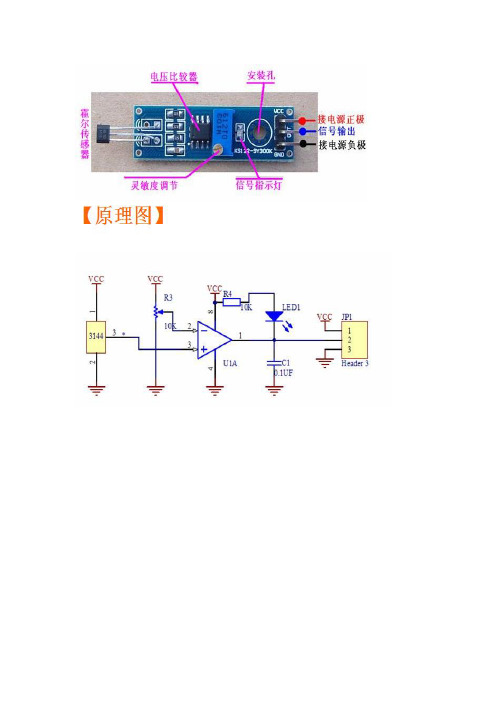
LM393管脚图实现功能:此版配套测试程序使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchunleo网站:淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!*********************************************************************/ /********************************************************************说明:1、当测量浓度大于设定浓度时,单片机IO口输出低电平*********************************************************************/ #include<reg52.h> //库文件#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型/******************************************************************** I/O定义*********************************************************************/ sbit LED=P1^0; //定义单片机P1口的第1位(即P1.0)为指示端sbit DOUT=P2^0; //定义单片机P2口的第1位(即P2.0)为传感器的输入端/********************************************************************延时函数*********************************************************************/ void delay()//延时程序{uchar m,n,s;for(m=20;m>0;m--)for(n=20;n>0;n--)for(s=248;s>0;s--);}/********************************************************************主函数*********************************************************************/ void main(){while(1) //无限循环{LED=1; //熄灭P1.0口灯if(DOUT==0)//当浓度高于设定值时,执行条件函数{delay();//延时抗干扰if(DOUT==0)//确定浓度高于设定值时,执行条件函数{LED=0; //点亮P1.0口灯}}}}/********************************************************************汇诚科技实现功能:0~9999计数器使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchunleo网站:淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!******************************************************************/#include <reg52.h>#define uchar unsigned char#define uint unsigned intuchar duan[10]={0xc0,0Xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //所需的段的位码//uchar wei[4]={0XEf,0XDf,0XBf,0X7f}; //位的控制端(开发板) uchar wei[4]={0X80,0X40,0X20,0X10}; //位的控制端(仿真)uint z,x,c,v, date; //定义数据类型uint dispcount=0;/******************************************************************延时函数******************************************************************/void delay(uchar t){uchar i,j;for(i=0;i<t;i++){for(j=13;j>0;j--);{ ;}}}/********************************************************************** 数码管动态扫描*********************************************************************/void xianshi(){/*****************数据转换*****************************/z=date/1000; //求千位x=date%1000/100; //求百位c=date%100/10; //求十位v=date%10; //求个位P2=wei[0];P0=duan[z];delay(50);P2=wei[1];P0=duan[x];delay(50);P2=wei[2];P0=duan[c];delay(50);P2=wei[3];P0=duan[v];delay(50);}/*************************************************************************中断函数**************************************************************************/ void ExtInt0() interrupt 0 //中断服务程序{dispcount++; //每按一次中断按键,计数加一if (dispcount==9999) //计数范围0-9999{dispcount=0;}}/*************************************************************************主函数**************************************************************************/ void main(){TCON=0x01; //中断设置IE=0x81;while(1){date=dispcount;xianshi();}}。
霍尔元件测速原理说明及应用
霍尔元件测速原理说明及应用霍尔元件是一种具有特殊结构和特殊材料的电子元件,是由半导体材料组成的。
霍尔元件的测速原理是基于霍尔效应。
霍尔效应是指当电流通过垂直于磁场的导体时,导体两侧产生电压差。
霍尔元件利用霍尔效应,可以将电流和磁场转换为电压信号。
霍尔元件的结构一般由霍尔片和固定在霍尔片上的金属触点组成。
霍尔片一般是在P型或N型半导体上叠加一层接近绝缘的金属层,这两个结构相对于磁场磁通线垂直。
当通过霍尔元件的电流流过时,霍尔片两侧会产生电压差。
这个电压差与磁场的强度、电流的大小及方向,以及霍尔元件的几何尺寸相关。
应用方面,霍尔元件主要用于测速和位置检测。
以下是几个常见的应用示例:1.汽车速度传感器:霍尔元件可以用来检测汽车轮胎凹凸不平引起的震动,从而测量汽车的速度。
它可以代替传统的速度传感器,具有精度高、反应快和不易受环境影响等优点。
2.磁盘驱动器:霍尔元件可用于检测磁盘的转速。
通过检测旋转磁盘上的磁头是否通过霍尔元件附近的磁场来测量转速。
这对于磁盘驱动器的控制和数据读取非常重要。
3.电动机控制:霍尔元件可以用于检测电动机的转速。
通过将霍尔元件固定在电动机旋转轴上,可以通过检测每个霍尔元件通过磁场所产生的电压来测量电动机的转速。
4.位置检测:通过将霍尔元件固定在物体上,可以实时检测物体的位置。
这在一些自动控制系统中很有用,比如门禁系统、自动灯光调节和行车记录仪。
霍尔元件在工业和生活中有很广泛的应用。
它具有高灵敏度、快速响应、抗干扰能力强等优点,可以实现非接触测量和控制。
随着科技的进步和应用领域的扩大,霍尔元件的应用将会更加广泛。
霍尔测速原理
霍尔测速原理
霍尔测速原理指的是利用霍尔效应测量物体的速度的原理。
霍尔效应是指在某些材料中,当电流通过时,材料内部出现电子运动的现象,这种电子受到外部磁场影响,使它们的运动轨迹发生弯曲,从而在材料表面产生电压。
利用这种原理,可以利用霍尔元件将速度转换成电压信号,进而测量物体的速度。
具体来说,霍尔元件是一种利用霍尔效应实现电子测速的传感器,它通常由一段金属引线和一个半导体芯片组成。
当物体运动时,霍尔元件所在位置的磁场随着物体运动而变化,从而在霍尔元件上产生电压信号,这个信号与物体的速度成正比。
通过测量这个电压信号的大小,就可以计算出物体的实际速度。
霍尔测速原理具有速度范围广、测量精度高的优点,因此被广泛应用于机械制造、汽车、航空航天等领域的速度测量中。
霍尔编码器测速原理
霍尔编码器测速原理霍尔编码器是一种常见的测速装置,它通过检测旋转物体上的磁场变化来测量物体的转速。
霍尔编码器的测速原理是基于霍尔效应的,它可以将旋转物体上的运动转化为电信号输出,从而实现对物体转速的测量。
霍尔编码器的工作原理是基于霍尔效应的。
霍尔效应是指当电流通过一定材料时,会产生一定的磁场,而当磁场通过一定材料时,会产生一定的电势差。
霍尔编码器利用这种效应,通过在旋转物体上安装磁铁,当旋转物体转动时,磁铁会产生磁场变化,从而在霍尔编码器上产生电势差,进而输出电信号。
霍尔编码器通常由霍尔元件、磁铁和信号处理电路组成。
霍尔元件是一种半导体器件,它可以检测磁场变化并将其转化为电信号输出。
磁铁通常安装在旋转物体上,当旋转物体转动时,磁铁会产生磁场变化,从而在霍尔元件上产生电势差。
信号处理电路则负责将霍尔元件输出的电信号进行处理,从而得到物体的转速。
霍尔编码器的测速精度高、稳定性好,因此在工业生产中得到广泛应用。
它可以用于测量各种旋转物体的转速,如电机、风扇、轮胎等。
同时,霍尔编码器还可以用于测量线速度,只需要将磁铁安装在运动物体上即可。
在使用霍尔编码器进行测速时,需要注意一些问题。
首先,磁铁的安装位置和方向应该正确,否则会影响测速精度。
其次,霍尔编码器的输出信号需要进行滤波和放大处理,以提高信号质量和稳定性。
最后,霍尔编码器的工作环境应该干燥、无尘、无油,以保证其正常工作。
总之,霍尔编码器是一种常见的测速装置,它利用霍尔效应将旋转物体的运动转化为电信号输出,从而实现对物体转速的测量。
霍尔编码器具有测速精度高、稳定性好等优点,在工业生产中得到广泛应用。
霍尔传感器测速原理
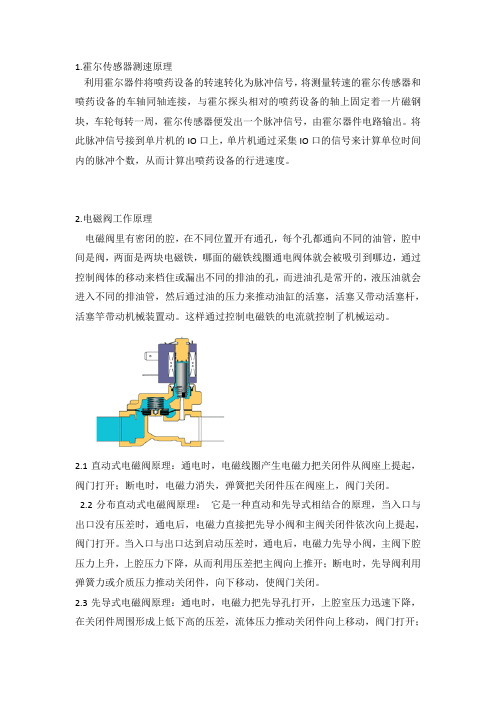
1.霍尔传感器测速原理利用霍尔器件将喷药设备的转速转化为脉冲信号,将测量转速的霍尔传感器和喷药设备的车轴同轴连接,与霍尔探头相对的喷药设备的轴上固定着一片磁钢块,车轮每转一周,霍尔传感器便发出一个脉冲信号,由霍尔器件电路输出。
将此脉冲信号接到单片机的IO口上,单片机通过采集IO口的信号来计算单位时间内的脉冲个数,从而计算出喷药设备的行进速度。
2.电磁阀工作原理电磁阀里有密闭的腔,在不同位置开有通孔,每个孔都通向不同的油管,腔中间是阀,两面是两块电磁铁,哪面的磁铁线圈通电阀体就会被吸引到哪边,通过控制阀体的移动来档住或漏出不同的排油的孔,而进油孔是常开的,液压油就会进入不同的排油管,然后通过油的压力来推动油缸的活塞,活塞又带动活塞杆,活塞竿带动机械装置动。
这样通过控制电磁铁的电流就控制了机械运动。
2.1直动式电磁阀原理:通电时,电磁线圈产生电磁力把关闭件从阀座上提起,阀门打开;断电时,电磁力消失,弹簧把关闭件压在阀座上,阀门关闭。
2.2分布直动式电磁阀原理:它是一种直动和先导式相结合的原理,当入口与出口没有压差时,通电后,电磁力直接把先导小阀和主阀关闭件依次向上提起,阀门打开。
当入口与出口达到启动压差时,通电后,电磁力先导小阀,主阀下腔压力上升,上腔压力下降,从而利用压差把主阀向上推开;断电时,先导阀利用弹簧力或介质压力推动关闭件,向下移动,使阀门关闭。
2.3先导式电磁阀原理:通电时,电磁力把先导孔打开,上腔室压力迅速下降,在关闭件周围形成上低下高的压差,流体压力推动关闭件向上移动,阀门打开;断电时,弹簧力把先导孔关闭,入口压力通过旁通孔迅速腔室在关阀件周围形成下低上高的压差,流体压力推动关闭件向下移动,关闭阀门。
3.光电耦合器光电偶合器件(简称光耦)是把发光器件(如发光二极体)和光敏器件(如光敏三极管)组装在一起,通过光线实现耦合构成电—光和光—电的转换器件.它对输入、输出电信号有良好的隔离作用.当电信号送入光电耦合器的输入端时,发光二极体通过电流而发光,光敏元件受到光照后产生电流,CE导通;当输入端无信号,发光二极体不亮,光敏三极管截止,CE不通。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
霍尔测速测速是工农业生产中经常遇到的问题,学会使用单片机技术设计测速仪表具有很重要的意义。
要测速,首先要解决是采样的问题。
在使用模拟技术制作测速表时,常用测速发电机的方法,即将测速发电机的转轴与待测轴相连,测速发电机的电压高低反映了转速的高低。
使用单片机进行测速,可以使用简单的脉冲计数法。
只要转轴每旋转一周,产生一个或固定的多个脉冲,并将脉冲送入单片机中进行计数,即可获得转速的信息。
下面以常见的玩具电机作为测速对象,用CS3020设计信号获取电路,通过电压比较器实现计数脉冲的输出,既可在单片机实验箱进行转速测量,也可直接将输出接到频率计或脉冲计数器,得到单位时间内的脉冲数,进行换算即可得电机转速。
这样可少用硬件,不需编程,但仅是对霍尔传感器测速应用的验证。
1 脉冲信号的获得霍尔传感器是对磁敏感的传感元件,常用于开关信号采集的有CS3020、CS3040等,这种传感器是一个3端器件,外形与三极管相似,只要接上电源、地,即可工作,输出通常是集电极开路(OC)门输出,工作电压范围宽,使用非常方便。
如图1所示是CS3020的外形图,将有字面对准自己,三根引脚从左向右分别是Vcc,地,输出。
图1 CS3020外形图使用霍尔传感器获得脉冲信号,其机械结构也可以做得较为简单,只要在转轴的圆周上粘上一粒磁钢,让霍尔开关靠近磁钢,就有信号输出,转轴旋转时,就会不断地产生脉冲信号输出。
如果在圆周上粘上多粒磁钢,可以实现旋转一周,获得多个脉冲输出。
在粘磁钢时要注意,霍尔传感器对磁场方向敏感,粘之前可以先手动接近一下传感器,如果没有信号输出,可以换一个方向再试。
这种传感器不怕灰尘、油污,在工业现场应用广泛。
2 硬件电路设计测速的方法决定了测速信号的硬件连接,测速实际上就是测频,因此,频率测量的一些原则同样适用于测速。
通常可以用计数法、测脉宽法和等精度法来进行测试。
所谓计数法,就是给定一个闸门时间,在闸门时间内计数输入的脉冲个数;测脉宽法是利用待测信号的脉宽来控制计数门,对一个高精度的高频计数信号进行计数。
由于闸门与被测信号不能同步,因此,这两种方法都存在±1误差的问题,第一种方法适用于信号频率高时使用,第二种方法则在信号频率低时使用。
等精度法则对高、低频信号都有很好的适应性。
图2是测速电路的信号获取部分,在电源输入端并联电容C2用来滤去电源尖啸,使霍尔元件稳定工作。
HG表示霍尔元件,采用CS3020,在霍尔元件输出端(引脚3)与地并联电容C3滤去波形尖峰,再接一个上拉电阻R2,然后将其接入LM324的引脚3。
用LM324构成一个电压比较器,将霍尔元件输出电压与电位器R P1比较得出高低电平信号给单片机读取。
C4用于波形整形,以保证获得良好数字信号。
LED便于观察,当比较器输出高电平时不亮,低电平时亮。
微型电机M可采用型,通过电位器R P1分压,实现提高或降低电机转速的目的。
C1电容使电机的速度不会产生突变,因为电容能存储电荷。
电压比较器的功能:比较两个电压的大小(用输出电压的高或低电平,表示两个输入电压的大小关系):当“+”输入端电压高于“-”输入端时,电压比较器输出为高电平;当“+”输入端电压低于“-”输入端时,电压比较器输出为低电平;比较器还有整形的作用,利用这一特点可使单片机获得良好稳定的输出信号,不至于丢失信号,能提高测速的精确性和稳定性。
C1图.2 测速电路原理图3 测速程序测量转速,使用霍尔传感器,被测轴安装有1只磁钢,即转轴每转一周,产生1个脉冲,要求将转速值(转/分)显示在数码管上。
用C语言编制的程序如下://硬件:老版STC实验版//P3-5口接转速脉冲#include <STC12C5410AD.H> // 单片机内部专用寄存器定义#define uchar unsigned char#define uint unsigned int //数据类型的宏定义uchar code LK[10]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,} ;//数码管0~9的字型码uchar LK1[4]={0xfe,0xfd,0xfb,0xf7}; //位选码uint data z,counter; //定义无符号整型全局变量lk//====================================================void init(void) //定义名为init的初始化子函数{ //init子函数开始,分别赋值TMOD=0X51; //GATE C/T M1 M0 GATE C/T M1 M0 计数器T1 定时器T0// 0 1 0 1 0 0 0 1TH1=0; //计数器初始值TL1=0;TH0=-(50000/256); //定时器t0 定时50msTL0=-(50000%256);EA=1; // IE=0X00; //EA - ET1 ES ET1 EX1 ET0 EX0 ET0=1; // 1 0 0 0 0 0 1 0TR1=1;TR0=1;TF0=1;}//=============================================void delay(uint k) //延时程序{uint data i,j;for(i=0;i<k;i++){for(;j<121;j++) {;}}}//================================================void display(void) //数码管显示{P1=LK[z/1000];P2=LK1[0];delay(10);P1=LK[(z/100)%10];P2=LK1[1];delay(10);P1=LK[(z%100)/10];P2=LK1[2];delay(10);P1=LK[z%10];P2=LK1[3];delay(10);}//=========================================void main(void) //主程序开始{uint temp1,temp2;init(); //调用init初始化子函数for(;;){temp1=TL1;temp2=TH1;counter=(temp2<<8)+temp1; //读出计数器值并转化为十进制//z=counter;display();} //无限循环语句结束} //主程序结束//=================================================== // uint chushi=60;void timer0(void) interrupt 1 using 1{TH0=-(50000/256); //定时器t0 定时50msTL0=-(50000%256);// chushi--;// if(chushi<=0){z=counter /0.5 ; //读出速度//}TH0=0; //每50MS清一次定时器TL1=0;}霍尔测速测速是工农业生产中经常遇到的问题,学会使用单片机技术设计测速仪表具有很重要的意义。
要测速,首先要解决是采样的问题。
在使用模拟技术制作测速表时,常用测速发电机的方法,即将测速发电机的转轴与待测轴相连,测速发电机的电压高低反映了转速的高低。
使用单片机进行测速,可以使用简单的脉冲计数法。
只要转轴每旋转一周,产生一个或固定的多个脉冲,并将脉冲送入单片机中进行计数,即可获得转速的信息。
下面以常见的玩具电机作为测速对象,用CS3020设计信号获取电路,通过电压比较器实现计数脉冲的输出,既可在单片机实验箱进行转速测量,也可直接将输出接到频率计或脉冲计数器,得到单位时间内的脉冲数,进行换算即可得电机转速。
这样可少用硬件,不需编程,但仅是对霍尔传感器测速应用的验证。
1 脉冲信号的获得霍尔传感器是对磁敏感的传感元件,常用于开关信号采集的有CS3020、CS3040等,这种传感器是一个3端器件,外形与三极管相似,只要接上电源、地,即可工作,输出通常是集电极开路(OC)门输出,工作电压范围宽,使用非常方便。
如图1所示是CS3020的外形图,将有字面对准自己,三根引脚从左向右分别是Vcc,地,输出。
图1 CS3020外形图使用霍尔传感器获得脉冲信号,其机械结构也可以做得较为简单,只要在转轴的圆周上粘上一粒磁钢,让霍尔开关靠近磁钢,就有信号输出,转轴旋转时,就会不断地产生脉冲信号输出。
如果在圆周上粘上多粒磁钢,可以实现旋转一周,获得多个脉冲输出。
在粘磁钢时要注意,霍尔传感器对磁场方向敏感,粘之前可以先手动接近一下传感器,如果没有信号输出,可以换一个方向再试。
这种传感器不怕灰尘、油污,在工业现场应用广泛。
2 硬件电路设计测速的方法决定了测速信号的硬件连接,测速实际上就是测频,因此,频率测量的一些原则同样适用于测速。
通常可以用计数法、测脉宽法和等精度法来进行测试。
所谓计数法,就是给定一个闸门时间,在闸门时间内计数输入的脉冲个数;测脉宽法是利用待测信号的脉宽来控制计数门,对一个高精度的高频计数信号进行计数。
由于闸门与被测信号不能同步,因此,这两种方法都存在±1误差的问题,第一种方法适用于信号频率高时使用,第二种方法则在信号频率低时使用。
等精度法则对高、低频信号都有很好的适应性。
图2是测速电路的信号获取部分,在电源输入端并联电容C2用来滤去电源尖啸,使霍尔元件稳定工作。
HG表示霍尔元件,采用CS3020,在霍尔元件输出端(引脚3)与地并联电容C3滤去波形尖峰,再接一个上拉电阻R2,然后将其接入LM324的引脚3。
用LM324构成一个电压比较器,将霍尔元件输出电压与电位器R P1比较得出高低电平信号给单片机读取。
C4用于波形整形,以保证获得良好数字信号。
LED便于观察,当比较器输出高电平时不亮,低电平时亮。
微型电机M可采用型,通过电位器R P1分压,实现提高或降低电机转速的目的。
C1电容使电机的速度不会产生突变,因为电容能存储电荷。
电压比较器的功能:比较两个电压的大小(用输出电压的高或低电平,表示两个输入电压的大小关系):当“+”输入端电压高于“-”输入端时,电压比较器输出为高电平;当“+”输入端电压低于“-”输入端时,电压比较器输出为低电平;比较器还有整形的作用,利用这一特点可使单片机获得良好稳定的输出信号,不至于丢失信号,能提高测速的精确性和稳定性。
C1图.2 测速电路原理图3 测速程序测量转速,使用霍尔传感器,被测轴安装有1只磁钢,即转轴每转一周,产生1个脉冲,要求将转速值(转/分)显示在数码管上。