挖掘机负载敏感系统介绍(中文)
第一讲 负载敏感系统

9/18
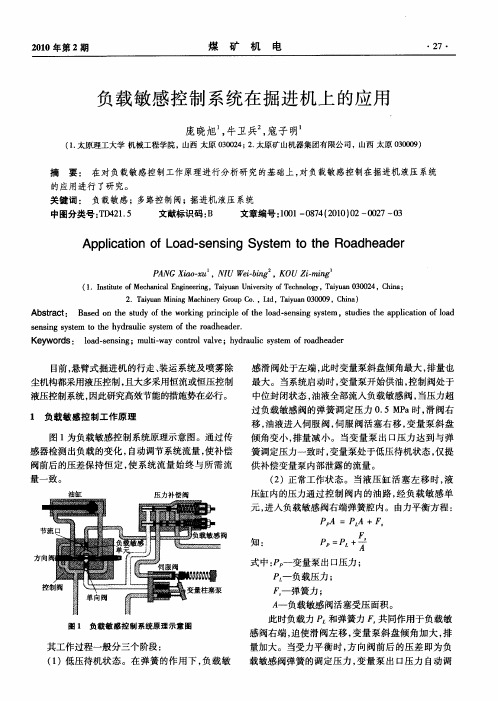
第二节 中川采用的小挖系统方案
中川的小挖系统方案由 负载敏感泵、LUDV主阀和工作装置组成
市场部专题培训
10/18
市场部专题培训
11/18
第二节 中川采用的小挖系统方案
中川系统的优势
➢ 1.按需提供流量,节约能量
➢ 2.各工作装置的流量分配不受负载影响,良好的操作性
➢ 3.在流量不饱和的情况下仍可实现流量分配功能,抗饱和性
➢ 2.如何使各工作装置的流量分配不受负载影响,获得良好操作性
在流量饱和的前提下,复合动作时 对低压负载侧的阀芯进行压力补偿, 使得每根阀芯的前后压差总为一个 固定值,从而使阀芯的流量只和阀 芯的开口面积相关。
市场部专题培训
14/18
第二节 中川采用的小挖系统方案
➢ 2.如何使各工作装置的流量分配不受负载影响,获得良好操作性
市场部专题培训
16/18
第二节 中川采用的小挖系统方案
➢ 3.中川系统抗饱和性说明。
LS = pcHigh
Lastdruck niedrig Low Pressure postion(1)pc = 来自S-System = p'
High
pc = LS-System = p'
High
Lastdruck hoch High Pressure Position
市场部专题培训 ---小挖系统
第一讲 负载敏感系统
主讲:吴绍泽
培训课程安装排
• 第一讲 负载敏感系统 • 第二讲 VS18LUDV主阀 • 第三讲 AP3VO95主泵 • 第四讲 MA45W回转马达及其减速机
市场部专题培训
2/18
第一讲 负载敏感系统
负载敏感控制系统在掘进机上的应用
簧调定压力一致时, 变量泵处于低压待机状态, 仅提 供补偿 变量 泵 内部泄露 的流量 。
( )正 常工作 状 态 。当液 压 缸 活 塞 左 移 时 , 2 液 压 缸 内的压 力通过 控 制 阀 内 的油 路 , 经负 载 敏感 单 元, 进入 负载 敏感 阀右端 弹簧腔 内 。由力平衡 方程 :
K y rs: la —e sn e wo d o d sn ig;mut w y c nrlv le y r ui ytm f a h a e l - a o t av ;h da l s s i o c e o d e d r o r
目前 , 悬臂式 掘进 机 的行走 、 运系统 及 喷雾 除 装
PANG a —, ,NI We— ig Xio XU U ib n ,KOU — n Zimi g
( .Is t eo cai l nier g T i a nvri f eh o g , a un0 0 2 , hn ; 1 ntu f i t Mehnc gnei , a u nU i syo cnl y T i a 30 4 C i aE n y e t T o y a
的应 用进行 了研 究。
关键词 : 负载敏感;多路控制阀; 掘进机液压系统 中图分类号 :I 15 TM2 . 文献标 识码 : B 文章编 号 :01 07 (000 02 0 10 — 84 2 1)2- 07- 3
Ap l a in o o d s n ig Sy t m o t e Ro d e d r p t fL a - e s s e t h a h a e i o c n
伺服 阀 中 , 变量泵 斜盘倾 角趋 于零 , 而使 变量 泵 使 从 排量 降至近乎 为零 的状态 。此时变 量泵仅提 供 高压
负载敏感系统特点

负载敏感系统特点负载敏感系统是一种感受系统压力-流量需求,且仅提供所需求的流量和压力的液压回路。
负载敏感控制系统的功率损耗较低,效率远高于常规液压系统。
高效率、功率损失小意味着燃料的节省以及液压系统较低的发热量。
负载敏感控制技术本应用于构造一种未来的传动及控制系统,其高效的特点使负载敏感控制成为所有传动及控制系统的理想设计方案。
通过负载反馈信号,控制系统的工作与泄荷。
简而言之,负载敏感系统是一种感受系统压力-流量需求,且仅提供所需求的流量和压力的液压回路。
实现负载敏感控制的完整装置由如下元件组成:首先需要一个变量柱塞泵,该泵具有一个压力补偿器,系统不工作时,补偿器使其能够在较低的压(200PSI)下保持待机状态。
当系统转入工作状态时,补偿器感受系统的流量需求并在系统工况变化时根据流量需求提供可调的流量。
同时,液压泵也要感受并响应液压系统的压力需求。
多数液压系统并非在恒定的压力下工作,当外部载荷变化时,液压系统的工作压力是不同的。
然后需要一个具有特殊感应油路和阀口的控制阀,以实现负载敏感系统的完整控制特性。
当液压系统未工作,处于待机状态时,控制阀必须切断作动油缸(或马达)与液压泵之间的压力信号。
这将在系统未工作时导致液压泵自动转入低压等待状态。
当控制阀工作时,先从作动油缸(或马达)得到压力需求,并将压力信号传递给液压泵,使泵开始对系统压力做出响应。
系统所需的流量是由滑阀的开度控制的。
系统的流量需求通过信号道、控制阀反馈给液压泵。
这种负载感应式柱塞泵与负载敏感控制阀的组合使整个液压系统具有根据载荷情况提供作需压力-流量的特性,此即负载敏感系统的基本功能。
负载敏感控制系统的功率损耗较低,效率远高于常规液压系统。
高效率、功率损失小意味着燃料的节省以及液压系统较低的发热量。
单一的液压泵可满足多个回路的压力-流量需求。
传统的中位开方式定量泵液压系统为满足同一系统中不同支路的工作要求,必须采用多联泵或流量分配器。
负载敏感系统

卷扬起落、回转同时动作
连续工作时间长:可连续作业。 故障少:70%故障由于液压油脏引起,液压油温不要超过80度。
节能:能否少耗点油,使用成本低。柴油贵啊!
二、负载敏感技术能解决什么问题:
1. 节能:与传统的节流调速系统的比较。 节能了就减少液压系统发热、延长连续作业时间。 2. 复合动作:不同负载可同时动作。
二、负载敏感系统:以略高于负载压力工作。
节流系统
液压系统关注的速度
速度调速回路:节流调速回路
容积调速回路 节流调速回路: 进油节流调速回路 回油节流调速回路
A1 A2
旁路节流调速回路
具体内容结合一本教材自学
Q = f (Dp, A) Dp1 = Dp2
进油节流调速回路(定压式)
A P q
1 1 1
图8.5 出口节流调速回路
负载敏感工作压力
定量泵(三通压力补偿器)
变量泵系统
变量泵的工作压力=负载压力 +变量泵的Δ p
定量泵工作压力=负载压力+ 三通压力补偿器弹簧压力 (10bar左右)
二、负载敏感:压力补偿方式
阀前补偿
阀后补偿
Q A
Q=f(A, Dp ),
Q
A
Q K A Dp
m
Dp
如果Dp =恒定,则: Q=f (A),流量(即速度)只 与节流口(即阀的开口)面 积有关,而与负载的变化无
流量(即速度)不仅仅与节 流口(即阀的开口)面积 有关,而且,与负载的变 化有关。
关(负荷敏感)。
先导控制阀DQKZF
过载插装单向阀 制动器控制 测压口
过放保护
单向阀的开启压力虽然 只有0.15bar但阻力仍 很大,影响了泄荷
挖掘机负载敏感系统分析

挖掘机负载敏感系统分析丘伟平【期刊名称】《流体传动与控制》【年(卷),期】2014(0)5【摘要】Load sensing system in closed center of excavator has the advantages of superior control and energy sav-ing performance, and it is increasing favor by the majority of users. The working principle, composition, characteris-tics of load sensing system in closed center of excavators are introduced in this paper. Besides, the hydraulic control system of the multi-way valve and the pump is focused on.%介绍了挖掘机闭中心负载敏感系统组成及其工作原理、特性。
重点分析了多路阀压力补偿液压系统和液压泵控制系统的工作原理和特性。
【总页数】3页(P6-8)【作者】丘伟平【作者单位】龙工上海精工液压有限公司上海 201612【正文语种】中文【中图分类】TH137【相关文献】1.液压挖掘机负载敏感液压系统能耗特性研究 [J], 陈莛;孟令新;崔爽2.液压挖掘机多路阀同步性能负载敏感性分析 [J], 旷水章3.挖掘机阀前补偿负载敏感系统特性分析 [J], 胡鑫乐4.基于负载敏感和普通节流复合的挖掘机平地性能提升 [J], 薛源;张飞;翟海燕;邢红兵5.挖掘机先导控制负载敏感液压系统节能特性研究 [J], 曾亿山;吕安庆;赵志学;刘旺;刘常海;胡敏因版权原因,仅展示原文概要,查看原文内容请购买。
负载敏感和压力补偿的定义讲解

解决办法:一
是回转单独使用 单泵供油, 二是回转压力补 偿阀采用K<1的 压力补偿结构。
A2=A3=A1, K=A/A1 压力平衡式 Pin×A1=PL×A3=PLS ×A2 Pin=K×( PL +PLS )
多路阀主阀芯压降: ΔP=Pin-PL=K*PLS-(1-K)* PL 上式中,除回转K<1外,其余K=1,即ΔP=PLS
负载敏感和压力 补偿的定义
广西玉柴工程机械有限责任公司 易友南
一、负载敏感
通过感应检测出负载压力、流量和功率变化信号,向 液压系统进行反馈,实现节能控制、流量和调速控制、 恒力矩控制、力矩限制、恒功率控制、功率限制,转速 限制,同时动作和原动机动力匹配等控制的总称。
控制方式包括液压控制和电子控制。 负载敏感系统的液压元件: 负载敏感阀-----将压力、流量和功率变化信号向阀进行 反馈,实现控制功能的阀; 负载敏感泵-----将压力、流量和功率变化信号向泵进行 反馈,实现控制功能的泵和马达;
复合动作时,各阀的负载压力PL不同,但由于压 力相同补的偿,阀而都经受各相压同力的补P偿LS作阀用的,压因差此Pin-PL=ΔP是
Δ差P,’=起P-P到in了=负P-载PL均S-衡PL器此的压。差正好补偿了负载压力
PL+ΔP+ΔP’= PL+ PLS+P- PL-PLS=P
四、NACHI(不二越)负载敏感系统
发动机转速感受阀门F: P成r=正P2比H1,-P2帮L0P等r大式小右随边转即速节而流改件变S。的P压r作降用,于其H与阀通,过P的r↑,流量则
Qp↑。Pr=0.25~1.96Mpa
由于油泵调节阀H的目标压差随发动机转速而变, 使系统与发动机工况相匹配,在发动机转速范围
力士乐闭中心负载敏感压力补偿挖掘机液压系统
力士乐闭中心负载敏感压力补偿挖掘机液压系统主要内容介绍了力士乐闭中心负载敏感压力补偿挖掘机液压系统组成及其工作原理、特性。
重点分析了多路阀液压系统、液压泵控制系统、各主要液压作用元件液压回路及多路阀先导操纵系统等。
目前液压挖掘机有两种油路: 开中心直通回油六通阀系统和闭中心负载敏感压力补偿系统, 我国国产液压挖掘机大多采用”开中心”系统, 而国外著名的挖掘机厂家基本上都采用”闭中心”系统。
闭中心具有明显的优点, 但价格较贵。
国内厂家对开中心系统比较熟悉, 而对闭中心系统不太了解,因此有必要来介绍一下闭中心系统, 本文重点分析力士乐闭中心负载敏感压力补偿(LUDV) 挖掘机油路。
LUDV 意为与负载无关的分配阀。
LUDV系统力士乐挖掘机液压系统可以看作由以下4 部分组成:①多路阀液压系统(主油路) ;②液压泵控制液压系统(包括与发动机综合控制) ;③各液压作用元件液压子系统, 包括动臂、斗杆、铲斗、回转和行走液压系统, 还包括附属装置液压系统;④多路阀操纵和控制液压系统。
LUDV系统是力士乐等公司在改进负荷传感技术的基础上发展起来的,它是不受负载影响的流量分配系统,它将常开式压力补偿改为常闭式,泵所提供的流量与负载所需相匹配,避免了不必要的空流和节流损失。
即使泵的流量小于系统复合动作所需的流量,各动作的相对速度也不会发生变化,从而保证动作的协调性,避免动作冲击。
1 多路阀液压系统多路阀液压系统是液压挖掘机的主油路, 它确定了液压泵如何向各液压作用元件的供油方式, 决定了液压挖掘机的工作特性。
力士乐采用的闭中位负载敏感压力补偿多路阀液压系统的工作原理见图1 (因换向阀不影响原理分析, 故未画出) 。
图1 挖掘机力士乐主油路简图挖掘机力士乐主油路由工装油路和回转油路二个负载敏感压力补偿系统组成。
1.1 工装油路工作装置和行走油路(除回转外) 简称工装油路,用阀后补偿分流比负载敏感压力补偿(LUDV)系统, 具有抗饱和功能。
挖掘机负载敏感系统介绍(中文)

并能防止液压执行机构产生停滞。
LUDV功能
中位
(1)行程限制块(2)二次压力释放/防蚀阀(3)负载保持阀(4) LUDV压力补偿阀(5)先导梭阀
(6)控制阀杆(7)输入测流口pA (8)输入测流口pB (9)输出测流口BT (10)输出测流口AT
这个LUDV部件压力补偿阀安排在控制阀芯测流口的下游,它包含有一个控制阀芯(13)和一个能限定稳固初始位置的微压缩弹簧(14)。
独立操纵或最高负载执行机构
先导控制装置的先导压力使得控制阀芯(6)克服弹簧力相应按比例的移动。这个图中,A口的先导压力推着阀芯克服B侧控制盖内的弹簧力向右移动。控制阀芯的测流输入节流口(7)打开了从泵来的P口与P‘通道的连接。该压力使得压力补偿阀(13)打开并且被施加到单向阀(3)上。
在LUDV系统中,所有执行机构部分的p测流节流口总相同。但不是一个恒定值。根据非饱和状态的程度,它可能在设定值pLS控制器和大约2 bar的压力之间变化(见表:p依赖需求的流量),在这个范围内,LUDV系统按比例相应地分配流量。
由于这个原因,即使在非饱和状态下,LUDV系统内负载压力最高的执行机构也将不会陷入停顿状态,所有使用中的执行机构的速度根据ቤተ መጻሕፍቲ ባይዱ启的通流面积按比例减小。
说明:不同负载压力情况下的压力补偿阀的功能
如果在非饱和状态范围内的同步动作中,执行机构的速度减小,也就是测流节流口关闭,非饱和程度减少,如果其它的仍还起作用的部件的p测流节流口增加,执行机构动作速度的也就相应增加。
给机器的指令控制信号由液压或电子的控制装置动作产生,并立即响应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三位六通换向控制阀块 (open center)
液压控制技术
在液压控制技术起初,加工机械厂的加工运动的速度取决于控制阀的横截面及液压流体的粘度。
对于速度的灵敏控制只能通过严格操纵才能实现。
接着,根据3位6通换向阀的原理对第一个控制阀块做一个重大改进,就使得一个机床工人同时相应地控制几个加工运动成为可能。
下面用M1控制阀块的例子来图解这个工作原理
M1单阀块截面图
在阀杆中位,油液通过铸造的通道无压的从P口流到T口(中位循环),泵和执行机构工作油路的接口A和B连接切断。
可利用机械式的手柄或依靠液压方式在a1或b1口引入先导压力,使阀杆离开中位而移动。
依靠阀杆的换向和对阀杆的控制,减少P口到T口连接的通道,随着其进一步位移,进一步减少流通面积,使流阻增大(流通面积的缩减导致流阻的增加),以至于压力因此增加。
随着从P口到T口的流通面积减少,P口到A口或P口到B口的连接通道将打开,液体将流到执行器接口。
当由于压力和液压缸面积产生的力超过作用在液压缸上的负载外力时,油缸开始移动。
P→A(或P→B)的流通面积直接决定了流量,从而也决定了液压缸或液压马达的速度。
安全阀限制系统最高压力,活塞上单向阀能防止阀杆在中位时油缸下降。
以上所述的工作原理同样适用于几个阀杆,根据液压泵提供有效流量,所有操作能从停止到最大速度相应并行地受到控制。
三位六通换向阀的控制原理,也称作“节流控制”,它在元件布置方面是简单的,操作可靠,经济划算,系统可使用定量或变量泵。
缺点是节流调速时,有部分多余的压力油直接回油箱,造成功率损失。
而且,其控制特点是与压力相关的,在并联油路几个执行机构同时动作时,可能彼此互相影响。
这就是开发与负载压力无关的负载传感系统的决定性原因。
负载传感系统
同样就负载传感系统而言,执行机构的速度是由控制块主阀芯的位置决定的。
打开的通量截面较大也就意味着速度较高。
最基本的差异是用负载传感,流量是可控的。
泵只需要提供当前所需的流量,其功能是通过把从液压控制系统的压力反馈到泵上来实现的。
该泵设计成控制器在系统能以恒定的标准值来保持一定的压力差,以输出所需的流量。
负载传感控制阀0块设计为每个阀杆上都带有一个额外的流量控制部件。
压力补偿阀使
Steuer
-
Regl
流量控制阀在负载压力不同的情况下,也能给执行机构以恒定的流量。
压力补偿阀用一个给定的压力差作为检测变量,主阀芯的压力上下波动被检测,并且控制压力补偿阀的阀杆。
所述的这种形式的负载传感控制操作非常可靠和精确,操作人员可以获得一致的控制特
性。
给机器的指令控制信号由液压或电子的控制装置动作产生,并立即响应。
由于压力不同或粘度造成的影响能很大程度上得到补偿。
然而,如果几个执行机构同时需求的流量比泵能输出的最大流量高时,系统的性能可能就会受到限制。
因压力控制所需的压力差不能再被建立起来,即使用最高压力供给单独的执行机构也无法满足时,这就可能导致这些功能的停止。
Main spool
Pressure compensator
LS control block M4-15
LUDV 控制
LUDV 代表与负载压力无关的流量分配器,系统是一个特殊形式的负荷传感控制系统。
为了消除供给不足这一缺点,根据LUDV原理,控制块要有一个不同的设计形式。
当用在LS控制块情况下时,压力补偿阀不是安置在泵和主阀杆之间,而是安置在主阀
Druckwaage
LUDV 控制模块 M7-22
杆和执行端口之间。
所有相关的压力补偿阀都互相连接而且用相同的压力差操纵,其中最高的负载压力适用于所有压力补偿器。
当LUDV系统部协调,即按要求的速度操作所有执行机构所需流量大于泵的最大流量时,其通过所有压力补偿阀产生的压力差来实现,所有动作功能的速度均匀地减小能。
并能防止液压执行机构产生停滞。
LUDV 功能
中位
(3)(14)(4)(13)
(1)行程限制块 (2)二次压力释放/防蚀阀 (3) 负载保持阀 (4) LUDV 压力补偿阀 (5) 先导梭阀
(6) 控制阀杆 (7) 输入测流口 p → A (8) 输入测流口p → B (9) 输出测流口 B → T (10) 输出测流口 A → T
(11) 通道 p c→ A (12) 通道 p c→ B (13) 压力补偿控制阀杆 (14) 压缩弹簧
在控制阀中位时(a、b口无先导压力),从泵到P’通道的连接被阀芯封闭,负载保持
单向阀和压力补偿阀关闭。
在这个位置,P’通道和负载保持阀下游的压力通过阀芯的间隙减少到回油箱压力。
由于控制阀芯的重叠,密封长度使执行机构接口在壳体中封闭,执行机构因此保持在这个位置。
这个LUDV部件压力补偿阀安排在控制阀芯测流口的下游,它包含有一个控制阀芯(13)和一个能限定稳固初始位置的微压缩弹簧(14)。
独立操纵或最高负载执行机构
先导控制装置的先导压力使得控制阀芯(6)克服弹簧力相应按比例的移动。
这个图中,A口的先导压力推着阀芯克服B侧控制盖的弹簧力向右移动。
控制阀芯的测流输入节流口(7)打开了从泵来的P口与P‘通道的连接。
该压力使得压力补偿阀(13)打开并且被施加到单向阀(3)上。
执行机构A口压力Pc通过控制阀芯的(11)通道使左边的单向阀(3)关闭。
当P‘压力升至高于Pc时,单向阀打开,泵和执行机构之间的通道打开,执行机构开始动作。
执行机构排出的油从B口通过输出测流节流口(9)流回到油箱,只要执行机构口的压力低于设定压力,二次压力安全阀(2)保持关闭。
在外负荷作用力造成的执行机构气穴现象的情况下,与A口连接的过载阀(压力释放/防气蚀阀)的补油锥阀芯打开,进行补油,防止吸空。
9
在单独动作情况下或当执行机构的负载压力Pc在系统中处于最高,通过来自P‘通道的压力补偿阀的孔产生负载传感(LS)压力,并且反馈到泵控制器和带有较低负载压力的压力补偿阀部件。
从负载保持阀上游,P‘通道提供的LS信号,确保达到需要的工作压力,执行机构端口才打开,这可以防止由于LS供给从执行机构油路中分流油液而导致执行机构短暂下降。
压力补偿阀完全打开后, P‘通道与执行机构Pc接口连接而没有压降。
饱和系统
在饱和系统的操作中,经由测流节流口需求的流量小于或等于泵的流量
∑ Q 执行机构≤ Maximum Q 泵 (功率控制围)
∆p节流口基本上与泵的流量控制器上设定的∆p LS控制器相一致,两个值得差异是由于从泵到测流口的补油路上的损失造成的。
带有更高负载压力执行机构的同步动作
LS信号关闭压力补偿阀起作用
典型的例子就是动臂的提升和铲斗的同步动作,动臂回路中更高的负载压力使得铲斗部分的压力补偿阀中的节流口通流面积减少,在这种控制状态下,压力补偿阀的控制端产生一个从P‘通道到执行机构端口Pc的压降,通过测流节流口(7)的∆p是相同的。
因此,执行机构的速度与负载压力的差别无关。
当系统是非饱和状态时,由打开着的测流节流孔通流面积总和决定的油量将超过泵的最大流量,压力控制器不再能通过进一步转动泵的变量调节器来提供先前的系统压力,当泵已经提供根据泵特性曲线设定的最大流量时,泵的压力就减小。
在非饱和状态下,泵的排量只由功率控制器决定。
∑ Q
执行机构
> Maximum Q 泵
当系统是非饱和状态时,负载压力最高的执行机构的压力补偿阀完全打开,并且LS 压力 = p’,因此系统/泵的压力、 ∆p
测流节流口
和流量也随着非饱和状态程度的增加而下降。
在LUDV 系统中,所有执行机构部分的∆p 测流节流口
总相同。
但不是一个恒定值。
根据非饱
和状态的程度,它可能在设定值∆p LS 控制器 和大约2 bar 的压力之间变化(见表:∆p 依赖需求的流量),在这个围,LUDV 系统按比例相应地分配流量。
由于这个原因,即使在非饱和状态下,LUDV 系统负载压力最高的执行机构也将不会陷入停顿状态,所有使用中的执行机构的速度根据开启的通流面积按比例减小。
说明:不同负载压力情况下的压力补偿阀的功能
如果在非饱和状态围的同步动作中,执行机构的速度减小,也就是测流节流口关闭,非饱和程度减少,如果其它的仍还起作用的部件的∆p 测流节流口
增加,执行机构动作速度的也就相
应增加。
LS = p c
High
.rexroth.。