GPS低噪声放大器的设计
GPS宽带低噪声放大器及小型化阵列天线研究

本人签名:ຫໍສະໝຸດ 日期导师签名:日期
第一章 绪论
1
第一章
绪论
1.1 研究背景和意义
低噪声放大器是现代微波通信、雷达、电子战系统中的重要部件,它处于接 收系统的前端,对天线接收到的微弱射频信号进行线性放大,同时抑制各种噪声 干扰,提高系统灵敏度。由于LNA在接收系统中的特殊位置和作用,该部件的设 计对整个接收系统的性能指标起着关键作用[1]。 如果在接收系统的前端连接高性能的低噪声放大器,在低噪声放大器增益足 够大的情况下,就能够抑制后级电路的噪声,则整个接收机系统的噪声将主要取 决于放大器的噪声。如果低噪声放大器的噪声系数降低,接收机系统的噪声系数 也会变小,信噪比得到改善,灵敏度大大提高。由此可见微波低噪声放大器的性 能制约了整个接收系统的性能,对于整个接收系统技术水平的提高,也起了决定 性的作用。 随着科技在无线通讯不断进步,人们对天线设计和天线功能的预期值也逐步 提高。要求天线的体积小、效率高、宽频带、造价低廉且易于架设,并且能够很 容易的导入复杂系统中。如果工程师们可以设计出满足这样要求的天线它将可以 满足几代无线通信系统对天线的要求。然而,使用传统的小型化天线技术来设计, 上述的要求往往是互相矛盾的。例如,小型化天线如果不连接匹配网络结构,其 整体效率是很低的。因为在通常情况下,它的输入电阻和电抗与 50欧电源阻抗匹 配很差。设计电抗性和电阻性匹配网络的是一个很有挑战性的工作,因为在天线 系统中加入匹配网络往往会给系统的整体效率带来限制。 同时,随着多媒体时代的到来,人们要求未来的无线通信系统能够承载更大 的信息流量,例如,多元天线的使用就是一种有效的改善天线可靠度和提高信道 频带宽度的方法。但是将多个天线整合在一个狭小的空间内,会导致天线之间强 烈的耦合现象,系统中良好的隔离度是很难保持的。天线之间的耦合现象会导致 信号从一个天线泄露到另一个天线,从而增加了天线之间的信号相关性,导致天 线端口的能量流失现象,进一步降低了天线的辐射效率。通常情况下,天线之间 的信号隔离度可以用增大间距这种手段来提高,但是,在手机终端或者小型飞行 物这种严格限制空间的条件下,距离往往是受到限制的。 对于阵列天线和去耦网络这一模型的设计研究将对无线通信系统之中天线传 输效率的改进产生一定的帮助和推动作用。
射频前端设计中的低噪声放大器设计原则

射频前端设计中的低噪声放大器设计原则在射频前端设计中,低噪声放大器是至关重要的组成部分。
在设计低噪声放大器时,需要遵循一些原则以确保放大器的性能达到最佳状态。
首先,要选择合适的器件。
在设计低噪声放大器时,应选择高品质、低噪声的放大器器件。
常用的低噪声放大器器件包括场效应晶体管(FET)和双极晶体管(BJT)。
这些器件的噪声特性直接影响到整个放大器的性能,因此选择适当的器件至关重要。
其次,要注意电路匹配。
在低噪声放大器设计中,电路匹配是十分重要的。
通过进行合适的匹配,可以降低信号与噪声之间的干扰,从而提高放大器的性能。
电路匹配通常通过使用阻抗匹配网络来实现,确保输入与输出之间的阻抗匹配良好。
此外,要注意布局设计。
在低噪声放大器设计中,良好的布局设计可以有效地减少干扰和噪声。
应尽量减少电路路径长度,降低电路中的电感和电容,以减少信号与噪声之间的相互影响。
此外,应注意良好的接地设计,确保信号的良好接地,避免地线回流和干扰。
另外,要进行合适的偏置设计。
在低噪声放大器设计中,正确的偏置设计可以有效地提高放大器的性能。
合适的偏置电流可以提高放大器的线性度和稳定性,从而减少噪声的影响。
应根据所选用的器件类型和工作频率进行合适的偏置设计,以确保放大器性能的优化。
最后,要进行合适的仿真和测试。
在设计低噪声放大器时,应进行充分的仿真和测试,以验证电路设计的正确性和性能。
通过仿真可以提前发现潜在问题并进行调整,从而减少后期调试的时间和成本。
在实际测试中,应使用专业的测试设备和方法进行性能测试,确保放大器的性能达到设计要求。
综上所述,在设计射频前端中的低噪声放大器时,需要遵循一些设计原则,包括选择合适的器件、注意电路匹配、注意布局设计、进行合适的偏置设计以及进行充分的仿真和测试。
通过遵循这些原则,可以设计出性能优异的低噪声放大器,从而提高整个射频前端系统的性能和可靠性。
GPS与北斗二代双频接收机低噪放模块设计实现
GPS与北斗二代双频接收机低噪放模块设计实现摘要设计并实现了一款覆盖gpsl1波段和北斗二代b1波段的低噪放模块。
该模块中的低噪声放大器使用分立元件搭建,匹配电路调试灵活,满足了模块对输入输出驻波的高要求。
测试结果表明,低噪放模块增益为26db,带内增益平坦,输入输出驻波<1.5,噪声系数<2db,带外抑制度80dbc,输出1db压缩点8dbm,满足了导航系统接收机前端对低噪放模块的要求。
全球定位系统(gps)是20世纪70年代由美国陆、海、空3军联合研制的新一代空间卫星导航定位系统,其主要目的是为陆、海、空3大领域提供实时、全天候和全球性的导航服务。
北斗导航系统是我国自主研发、拥有独立知识产权的全球卫星导航系统。
根据全球卫星导航系统的定位原理及卫星信号特征,为实现接收机快速、连续、精确定位,多个卫星导航系统组合使用是未来发展的趋势。
本文就gps和北斗二代导航系统在接收机前端的组合应用进行了探索。
高噪放模块的主要功能就是将天线所发送至的射频信号展开低噪声压缩,滤波后输入至接收机。
本文设计同时实现了一款全面覆盖gpsl1波段(1575.42±1.023mhz)和北斗二代b1波段(1561.098±2.046mhz)的低噪摆模块,其具备输入输出驻波大、增益低、噪声系数大、拎外复制度低、输入1db放大点高等优点,可以用作导航系统的接收机前端。
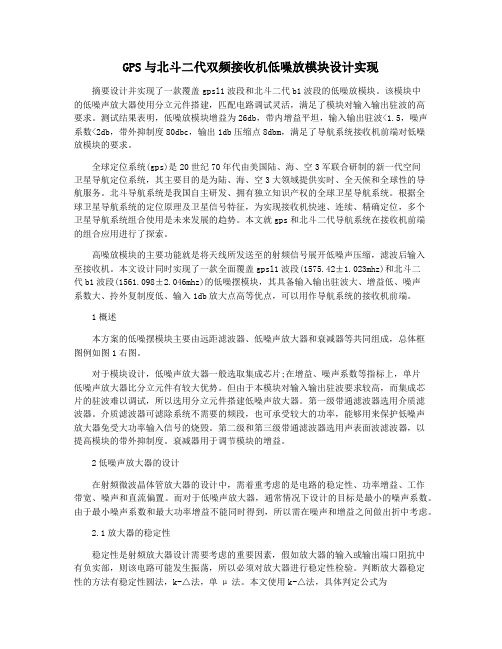
1概述本方案的低噪摆模块主要由远距滤波器、低噪声放大器和衰减器等共同组成,总体框图例如图1右图。
对于模块设计,低噪声放大器一般选取集成芯片;在增益、噪声系数等指标上,单片低噪声放大器比分立元件有较大优势。
但由于本模块对输入输出驻波要求较高,而集成芯片的驻波难以调试,所以选用分立元件搭建低噪声放大器。
第一级带通滤波器选用介质滤波器。
介质滤波器可滤除系统不需要的频段,也可承受较大的功率,能够用来保护低噪声放大器免受大功率输入信号的烧毁。
一种适用于卫星通信的低噪声放大器设计

Technology Study技术研究DCW0 引言在卫星通信系统中,矩形波导有较低的差损特性。
在天线溃电网络、接收机等设备中,矩形波导作为三维结构的无源器件,得到广泛使用。
有源电路如固态芯片一般是基于二维微带电路设计,在有源电路和无源波导集成的系统中,需要二维结构和三维结构之间的过渡,一般采用波导微带过渡的形式。
说到卫星通信,不得不说接收机,它是卫星通信下行链路建立的关键设备,接收机的噪声系数指标和天线的增益指标,直接决定系统的G/T值。
而G/T值是衡量卫星通信系统下行链路的关键指标,决定系统接收信号的好坏,决定系统接收质量的好坏。
接收机设计的关键就是低噪声放大器的设计,而低噪声放大器设计的关键,就是噪声系数指标和输入驻波特性。
低噪声放大器设计,需要根据低噪声管的管芯阻抗特性参数,设计相应的输入匹配以及相应的噪声匹配。
设计一种匹配,设计起来比较容易实现,难就难在怎么把输入匹配和噪声匹配都设计好[1]。
实现噪声匹配的时候,输入匹配也不差,这是一个矛盾的两个参数,往往把一个指标匹配好了,另一个指标要变差,反之也是如此。
所以设计时需要找到一个平衡点,让两者离最佳匹配点尽可能近,两者的指标都可以接受。
本文给大家介绍一种适用于卫星通信的Ku扩展频段低噪声放大器,采用波导到同轴再到微带线的形式设计无源过渡部分;采用最佳噪声匹配,同时优化输入匹配,设计有源放大部分。
1 低噪声放大器设计低噪声放大器设计原理图如图1所示。
它由两部分组成:一个是无源电路部分——波导同轴微带过渡;另外一个是有源电路部分——低噪声放大。
无源电路实现波导三维结构与微带平面二维结构之间的过渡;有源电路实现对高频微弱信号的低噪声放大。
图1 低噪声放大器设计原理图在三维高频电磁仿真软件 HFSS里,建立了一种波导同轴微带探针过渡的 HFSS仿真模型,如图 2(a)所示,波导选用 WR-75标准波导。
该模型在波导的E面中心插入同轴探针,通过调整同轴探针距波导短路面的距离、同轴探针插入的深度、同轴探针的尺寸等参数,优化端口输入驻波。
北斗导航接收通道低噪声放大器设计
(5)
1 - ISJ2 - %|2 + IAI2
2IS12I IS211
(6)
其中K为稳定系数。当满足公式(5)和公式(6)
时,放大器无条件稳定。当放大器不稳定时,通常引入
负反馈或在输入输出端串联小电阻,此类方法均是牺
牲增益和噪声系数来换取稳定m。
4低噪声放大器设计与仿真
4. 1偏置电路设计 偏置电路决定了放大器的静态工作点,关系到噪
声系数需小于2.3dBo 3.2增益
北斗卫星信号通过放大、滤波和下变频成为中频
Hale Waihona Puke 信号,北斗基带芯片采样时要求中频信号功率大于
OdBm⑹。所以,当输入信号功率为-127. 6dBm时,接
收通道增益需要大于127. 6dBo 接收通道上的射频集成芯片自带低噪声放大器、
混频器和中频放大器。其中低噪声放大器的增益为
42dB,混频器和中频放大器的增益为60dB。因此,接
收通道前端的低噪声放大器增益需要大于25. 6dB0 考虑到天线朝向、房屋遮挡和地球纬度等因素,增益设
为28dBo
3.3稳定性 放大器的稳定性决定了其能否正常工作,当反射
波超出稳定范围时放大器会出现震荡现象。放大器的
稳定性由各端口的S参数决定:
IAI = ISnS22 -S125211 <1
《电扎卄矣》(2019. No.3)
经过滤波器抗干扰设计,极大提高了对环境的适 应性。经过理论分析和计算,噪声系数为1.29,增益 为30dBo
-116.8 dBm的QPSK调制信号。为了满足接收通道
< 电气什矣〉(2019. No. 3)
39
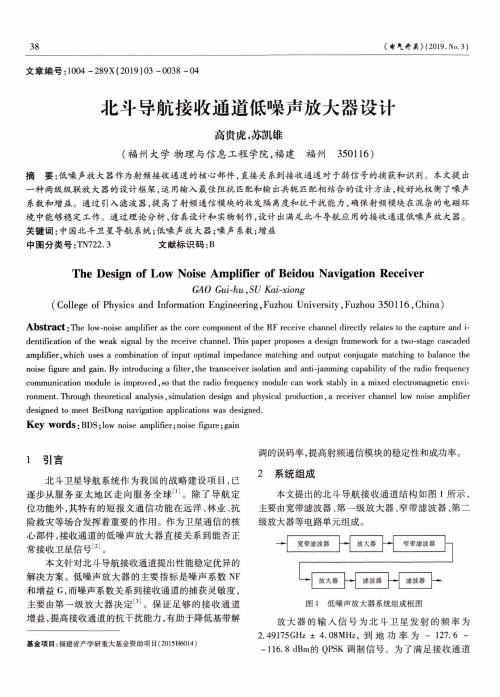
增益的要求,本文设计成两级级联放大的结构,第一级 采用pHEMT晶体管ATF-54143,该类晶体管具有低 噪声、超高速等优点,第二级选用固定增益射频芯片 ABA-31563提供足够的增益。同时,接收通道输入 端插入低插损的宽带滤波器,级间插入高带外抑制的 窄带滤波器,放大器后级联滤波器。本文的抗干扰设 计能够保证接收通道对WIFI、蓝牙等相近频点的信号 有足够的抑制度,同时抑制北斗L频点频率为 1.61568GHz ±4. 08MHz的信号,避免收发干扰。
GPS的低噪声放大器的设计

GPS的低噪声放大器的设计
秦岭;商锋
【期刊名称】《西安邮电学院学报》
【年(卷),期】2010(015)004
【摘要】论述应用于GPS的低噪声放大器的设计原理,并通过ADS仿真软件,设计出低噪声放大器.给出噪声系数、增益和输入端匹配的仿真结果.通过优化,可以使得噪声系数达到1.2以下、增益值达到30dB以上的指标.
【总页数】4页(P8-11)
【作者】秦岭;商锋
【作者单位】江苏无线电厂有限公司,江苏,南京,210022;西安邮电学院电子工程学院,陕西,西安,710121
【正文语种】中文
【中图分类】TN722.3
【相关文献】
1.面向GPS、北斗和TD-LTE-A的多模可重构低噪声放大器设计 [J], 刘章发;陈杰
2.基于ADS应用于GPS的低噪声放大器设计与仿真 [J], 唐海玲;赵春雨;宋家友
3.应用于GPS频段低噪声放大器的设计 [J], 商锋;黄荣礼
4.用于GPS卫星导航系统的低噪声放大器设计 [J], 项勇;周仁杰;段炼;甘业兵;马成炎;叶甜春
5.用于GPS的低噪声放大器设计 [J], 付小明
因版权原因,仅展示原文概要,查看原文内容请购买。
GPS接收机低噪声放大器设计
GPS接收机低噪声放大器设计低噪声放大器(Low Noise Amplifier,LNA)广泛应用于射电天文、卫星接收、雷达通信等收信机灵敏度要求较高的领域,主要作用是放大所接收的微弱信号、降低噪声、使系统解调出所需的信息数据。
而噪声系数(Noise Figure,NF)作为其一项重要的技术指标直接反映整个系统的灵敏度,所以LNA 设计对整个系统的性能至关重要。
1 GPS 接收机低噪声放大器的设计设计的LNA 主要指标为:工作频率为1 520~1 600 MHz;噪声系数NFO.50 dB;增益G16.0 dB;输入驻波比2;输出驻波比1.5。
1.1 器件选择选择合适的器件,考虑到噪声系数较低、增益较高,所以选择PHEMT GaAsFET 低噪声晶体管。
在设计低噪声放大器前,首先要建立晶体管的小信号模型,一般公司都会提供具有现成模型的放大器件。
这里选择Agilent 公司的生产的ATF-54143。
1.52~1.60 GHz 频带内,设计反τ型匹配网络,该匹配网络由集总元件电感、电容构成。
选择电感时,要选择高Q 电感。
为了在模拟仿真中能够与实际情况相符合,选用Murata 公司的电感和电容模型。
这里选用贴片电感型号为LQWl8,贴片电容型号为GRMl8,电感LQWl8 在1.6 GHz 典型Q 值为80。
1.2 直流偏置在设计低噪声放大器中,设计直流偏置的目标是选择合适的静态工作点,静态点的好坏直接影响电路的噪声、增益和线性度。
由电阻组成的简单偏置网络可以为ATF-54143 提供合适的静态工作点,但温度性较差。
可用有源偏置网络弥补温度性差的缺点,但有源偏置网络会使电路尺寸增加,加大了电路板排版的难度以及增加了功率消耗。
在设计实际电路中,要根据具体情况选择有源偏置网络,或是电阻偏置网络。
就文中的LNA 而言,考虑到结构和成本,这里选择电阻无源偏置网络。
采用Agilenl 的ATF54143,根据该公司给出的datasheet 指标,设计Vds=3.8 V、Ids=ll mA 偏置工作点。
gps放大器工作原理
gps放大器工作原理
GPS放大器(GPS amplifier)是一种电子设备,其工作原理是
通过增加输入GPS信号的幅度来提高信号的质量和强度。
它
利用放大器的增益特性,将输入的弱GPS信号放大到一个更
高的水平,以便GPS接收器可以更好地捕获和处理信号。
GPS放大器通常由一个低噪声放大器(LNA)和一个功率放
大器(PA)组成。
首先,低噪声放大器(LNA)将输入的弱信号放大,同时尽
量减小噪声的引入。
LNA通常使用高品质的低噪声晶体管来
增加信号的强度。
这样可以提高GPS接收器的灵敏度,使其
能够捕获到更远距离的GPS信号。
然后,功率放大器(PA)进一步放大信号的幅度,以确保在
传输信号时保持恰当的信号强度。
PA通常使用功率晶体管或
集成电路来提供更高的信号功率。
GPS放大器还会对放大的信号进行滤波和调整,以确保只有GPS频率范围内的信号被放大,并且没有其他干扰信号进入。
因此,GPS放大器通过将弱信号放大到一个更高的水平,使GPS接收器能够更好地接收和处理GPS信号,从而提高定位
的准确性和灵敏度。
低噪声放大器的两种设计方法与低噪声放大器设计实例
低噪声放大器的两种设计方法与低噪声放大器设计实例低噪声放大器的两种设计方法低噪声放大器(LNA)是射频收发机的一个重要组成部分,它能有效提高接收机的接收灵敏度,进而提高收发机的传输距离。
因此低噪声放大器的设计是否良好,关系到整个通信系统的通信质量。
本文以晶体管ATF-54143为例,说明两种不同低噪声放大器的设计方法,其频率范围为2~2.2 GHz;晶体管工作电压为3 V;工作电流为40 mA;输入输出阻抗为50 Ω。
1、定性分析1.1、晶体管的建模通过网络可以查阅晶体管生产厂商的相关资料,可以下载厂商提供的该款晶体管模型,也可以根据实际需要下载该管的S2P文件。
本例采用直接将该管的S2P文件导入到软件中,利用S参数为模型设计电路。
如果是第一次导入,则可以利用模块S-Params进行S参数仿真,观察得到的S参数与S2P文件提供的数据是否相同,同时,测量晶体管的输入阻抗与对应的最小噪声系数,以及判断晶体管的稳定性等,为下一步骤做好准备。
1.2、晶体管的稳定性对电路完成S参数仿真后,可以得到输入/输出端的mu在频率2~2.2 GHz之间均小于1,根据射频相关理论,晶体管是不稳定的。
通过在输出端并联一个10 Ω和5 pF的电容,m2和m3的值均大于1,如图1,图2所示。
晶体管实现了在带宽内条件稳定,并且测得在2.1 GHz时的输入阻抗为16.827-j16.041。
同时发现,由于在输出端加入了电阻,使得Fmin由0.48增大到0.573,Γopt为0.329∠125.99°,Zopt=(30.007+j17.754)Ω。
其中,Γopt是最佳信源反射系数。
1.3、制定方案如图3所示,将可用增益圆族与噪声系数圆族画在同一个Γs平面上。
通过分析可知,如果可用增益圆通过最佳噪声系数所在点的位置,并根据该点来进行输入端电路匹配的话,此时对于LNA而言,噪声系数是最小的,但是其增益并没有达到最佳放大。
因此它是通过牺牲可用增益来换取的。
低噪放声放大器设计教学课件
1 高输入阻抗
低噪声放大器具有高输入阻抗,能够最大限 度降低对信号源的负载影响。
2 高增益
低噪声放大器能够提供高增益,有效放大信 号并降低噪声。
3 宽带
低噪声放大器具有宽带性能,能够处理多种 频率范围内的信号。
4 低噪声
低噪声放大器通过优化电路设计和使用低噪 声元件,降低放大器的噪声水平。
低噪声放大器的应用
低噪声放大器的常用技术
原型技术
通过建立原型进行实验和测试,验证设计的有 效性。
数字技术
应用数字电路设计和信号处理算法,提高放大 器的灵活性和可调节性。
模拟技术
利用模拟电路设计方法,优化放大器的性能和 噪声特性。
射频电路板设计
考虑高频特性和电磁兼容性,设计满足射频要 求的电路板。
低噪声放大器的特点
设计案例分享
设计案例一
韦尔奇放大器设计:通过反馈控 制实现低噪声和高增益。
设计案例二
表面贴装低噪声放大器设计:采 用SMT技术实现紧凑布局。
设计案例三
射频前端放大器设计:应用于无 线通信系统中的接收机。
总结
1 设计过程回顾
低噪声放大器的设计流程包括电路预算、低噪声设计、放大器设计、稳定性分析和PCB设 计。
低噪声放大器的设计流程
1
电路预算
明确设计参数和要求,计算电路的主要参数和性能。
2
低噪声设计
选择合适的元件和电路拓扑,以降低放大器的噪声水平。
3
放大器设计
确定放大器的增益和带宽,优化电路以满足要求。
4
稳定性分析
分析和评估放大器的稳定性,确保在各种工作条件下都能正常工作。
5
PCB设计
进行放大器的电路板布局和布线设计,保证信号的良好传输和接地。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
低噪声放大器的设计姓名:#### 学号:################ 班级:1########一、设计要求1. 中心频率为1.45GHz ,带宽为50MHz ,即放大器工作在1.40GHz-1.50GHz频率段;2. 放大器的噪声系数NF<0.8dB , S11<-10dB ,S22<-15dB ,增益Gain>15dB 。
二、低噪声放大器的主要技术指标低噪声放大器的性能主要包括噪声系数、合理的增益和稳定性等。
1. 噪声系数NF放大器的噪声系数(用分贝表示)定义如下:()10lg in inout out S NNF dB S N ⎛⎫= ⎪⎝⎭式中NF 为射频/微波器件的噪声系数;in S ,in N 分别为输入端的信号功率和噪声功率;out S ,out N 分别为输出端的信号功率和噪声功率。
噪声系数的物理含义是,信号通过放大器后,由于放大器产生噪声,使得信噪比变坏,信噪比下降的倍数就是噪声系数。
2. 放大器的增益Gain在微波设计中,增益通常被定义为传输给负载的平均功率与信号源的最大资用功率之比:SLP P Gain =增益的值通常是在固定的频率点上测到的,低噪声放大器都是按照噪声最佳匹配进行设计的。
噪声最佳匹配点并非最大增益点,因此增益Gain 要下降。
噪声最佳匹配情况下的增益称为相关增益。
通常,相关增益比最大增益大概低2~4dB.3.稳定性一个微波管的射频绝对稳定条件是221112212212211,1,1K S S S S S S ><-<-。
只有当3个条件都满足时,才能保证放大器是绝对稳定的。
三、低噪声放大器的设计步骤1.下载并安装晶体管的库文件(1)由于ADS2008自带的元器件库里并没有ATF54143的元器件模型,所以需要从Avago公司的网站上下载ATF54143.zap,并进入ADS主界面,点击【File】——【Unarchive Project】进行安装。
(2)新建工程ATF54143_LNA_1_prj,执行菜单命令【File】——【Include/RemoveProjects】将ATF54143_prj添加到新建工程中,这样新建工程就能使用器件ATF54143了。
2.确定直流工作点低噪声放大器的设计的第一步是设置晶体管的直流工作点。
(1)在ADS中执行菜单【File】——【New Design】,在弹出的对话框中的Schematic Design Templates下拉列表中选择“DC_FET_T”模板,在Name 文本框中输入DC_FET_T,单击【OK】,这样DC_FET控件就被放置在原理图中了。
(2)在原理图中放置器件ATF54143,设置DC_FET控件的参数并连接原理图如图1所示。
图1 完整DC_FET_T原理图(3)仿真得到ATF54143的直流特性图如图2所示。
(4)根据ATF54143的数据手册,如图3所示,在900MHz时,当Vds=3V,Ids=30mA时Fmin接近最小值,此时增益约为23dB,能满足设计要求,故设置晶体管的直流工作点为Vds=3V,Ids=30mA.图2 ATF54143的直流特性图图3 ATF54143直流偏置曲线3.偏置电路的设计(1)创建一个新的原理图biascircuit,并在原理图中放入ATF54143的模型和DA_FETBias控件,放入直流源,连接各部件,如图4所示。
图4 完成后的偏置电路原理图(2)执行菜单命令【Design Guide】——【Amplifier】,在弹出的对话框中选择Transistor Bias Utility,单击【OK】,在弹出的对话框中设置相关参数(Vdd=5V,Vds=3V,Ids=30mA),单击【Design】将会弹出Bias Network selection 对话框,单击【OK】,ADS将自动生成一个偏置电路,如图5所示。
图5 偏置子电路(3)取R1=33Ohm,R2=224Ohm,R4=26Ohm,新建原理图biascircuit1,画出最终的偏置电路原理图如图6所示。
图6 偏置电路原理图4. 放大器的稳定性分析使用稳定系数也就是K 的“StabFact ”控件来判断电路的稳定性。
只有绝对稳定系数K>1,放大器电路才稳定。
(1)新建原理图LNA_schematic_1,在该原理图中添加各种元器件并设置相应参数。
注意在放大器的直流和交流通路之间要添加射频扼流电路(直流通路实质上是一个无源低通电路,使直流偏置信号能传输到晶体管引脚,而要抑制射频信号,实际中一般是一个电感加一个旁路电容接地,在此先用扼流电感【DC_Feed 】代替。
同时直流偏置信号也不能传到两端的Term ,需加隔直电容,在此先用隔直电容【DC_Block 】代替。
)。
仿真结果如图7所示。
图7 最大增益和稳定系数K 的曲线从图7中可看出,在1.45GHz 时,最大增益为18.89dB,稳定系数为K=1.145,小于1,可见该放大器稳定。
(2)使系统稳定的常用方法是添加负反馈,本次设计中将在ATF54143的两个源极m1freq, GHzS t a b F a c t 1m1freq=StabFact1=1.1451.450GHz m2freq, GHz M a x G a i n 1m2freq=MaxGain1=18.8911.450GHz加小电感作为负反馈。
一般情况下要反复调节反馈电感,使其在整个工作频率范围内稳定。
本次设计中Ls 最终选为1.28nH 。
电路图如图8所示。
图8 晶体管加负反馈后的电路图(3)将理想的DC_Feed 、DC_Block 元器件改成实际器件,在本设计中选用MuRata(日本村田公司)的电容和电感。
(4)将源极的两个电感换成微带线的形式(这两个电感值太小,实际很难做到,而且只要这两个电感有稍微改变会对整个电路的稳定性产生很大的影响。
)。
利用公式rZLl ε081.11=计算得微带线的实际长度为1.09mm 。
(5)全部换成实际器件后的原理图如图9所示。
图95. 噪声系数圆和输入匹配(1)利用ADS进行仿真得到噪声系数圆和增益圆如图10所示。
图10 噪声系数圆和增益圆其中,m4是LNA有最大增益时的输入端阻抗,m5是LNA有最小噪声系数时的输入端阻抗,但是这两点并不重合,在设计时必须在增益和噪声系数间做一个权衡。
对于低噪声放大器首先要考虑的是最小噪声,那么这里最优的输入端阻抗为m5点的阻抗Z*(0.081+j*0.261),其中Z定为50Ohm,则输入端的阻抗为4.05+j*13.05 Ohm。
为了达到最小噪声系数,在晶体管输入端要满足最佳源反射系数optΓ的要求,而整个电路的输入阻抗为Z=50 Ohm,所以需要输入匹配网络把*Γopt(*Γopt为m5处阻抗的共轭,即4.05-j*13.05 Ohm)变换到输入阻抗50 Ohm,输入匹配框图如图11所示。
图11 输入匹配框图(2)利用ADS进行仿真,采用微带线匹配,得到输入匹配电路。
(3)将输入匹配子电路复制到原理图中,并将隔直电容移到源端,此时噪声最优m4m6m5cir_pts (0.000 to 51.000)GaCirclem4m6cirdeDatam5indep(m4)=GaCircle=0.467 / -148.101gain=19.286286impedance = Z0 * (0.389 - j0.245)51indep(m6)=GaCircle=0.406 / -78.133gain=18.286286impedance = Z0 * (0.837 - j0.797)47indep(m5)=cirdeData=0.130 / 65.603ns figure=0.450435impedance = Z0 * (1.081 + j0.261)51化点已经偏离50 Ohm ,现在需要调节输入匹配电路微带线的长度来补偿。
(4) 用Tuning 工具来调节两段传输线的长度,在Tuning 时观察数据窗口的相关曲线的变化以达到理想效果。
最后,把TL3和TL4的电长度分别调到194.894deg 和129.368deg 时可以得到一个好的噪声系数和输入反射系数,结果如图12所示。
图12 Tuning 后的S 参数曲线6. 最大增益的输出匹配(1) 在ADS 中利用Zin 控件得到电路的输出阻抗为150.998-j*16.276 Ohm ,为了达到最大增益,需要利用输出匹配电路将50 Ohm 匹配到150.998+j*16.276 Ohm 。
其中输出匹配框图如图13所示。
图13 输出匹配框图(2)利用ADS 进行仿真,采用微带线匹配,得到输出匹配电路。
(3) 将输出匹配子电路复制到原理图中,并将输出端的耦合电容放到输出端,利用Tuning 工具进一步调节,仿真结果如图14所示,此时TL6=0.151572deg ,m14freq, GHzd B (S (1,1))m14freq=dB(S(1,1))=-11.2551.450GHzm80.81.01.21.41.61.80.62.0freq, GHz d B (S (2,2))m8freq=dB(S(2,2))=-17.0181.450GHzm110.81.01.21.41.61.80.62.001020freq, GHzd B (S (2,1))m11freq=dB(S(2,1))=17.9471.450GHz 0.81.01.21.4 1.61.80.62.0-80-70-60-50-40-30-90-20freq, GHzd B (S (1,2))TL5=9.59764deg。
图14 输出匹配后的仿真结果7.匹配网络的实现(1)利用LinCale工具计算出四段匹配微带线的物理长度如下表所示:其中实际微带线的宽度为1.846290mm。
(2)将所有的理想微带线全部换为实际物理长度的微带线。
微带线换成实际物理尺寸后仍然可以通过Tuning来进行微调。
(4)在电源处加3个电容,分别为1uF,0.01uF,10pF。
原理图如图15所示,仿真结果如图16和图17所示。
m7m14-12-10-14freq, GHzdB(S(1,1))m7m14freq=dB(S(1,1))=-10.0751.400GHzfreq=dB(S(1,1))=-11.5061.500GHzm8m160.8 1.0 1.2 1.4 1.6 1.80.6 2.0-24-22-20-18-16-14-12-10-26freq, GHzdB(S(2,2))m8m16freq=dB(S(2,2))=-16.0961.400GHzfreq=dB(S(2,2))=-16.3581.500GHzm11m130.8 1.0 1.2 1.4 1.6 1.80.6 2.0-20-1010-3020freq, GHzdB(S(2,1))m11m13freq=dB(S(2,1))=17.9171.400GHzfreq=dB(S(2,1))=17.6561.500GHz0.8 1.0 1.2 1.4 1.6 1.80.6 2.0-70-60-50-40-30-80-20freq, GHzdB(S(1,2))图15 完整的LNA 电路原理图图16 最终S 参数曲线m7m14-10-12freq, GHzd B (S (1,1))m7m14freq=dB(S(1,1))=-10.0131.400GHz freq=dB(S(1,1))=-10.3471.500GHzm8m160.81.01.21.41.61.80.62.0-25-20-15-10-30freq, GHz d B (S (2,2))m8m16freq=dB(S(2,2))=-17.1331.400GHzfreq=dB(S(2,2))=-17.3971.500GHzm11m13-30-20-10010-4020freq, GHzd B (S (2,1))m11m 13freq=dB(S(2,1))=18.1061.400GHz freq=dB(S(2,1))=17.7451.500GHz 0.81.01.21.4 1.6 1.80.62.0-80-70-60-50-40-30-90-20freq, GHzd B (S (1,2))图17 最终稳定系数和噪声参数曲线8. 版图的设计对于分立的电容、电感、电阻等器件,可以采用ADS 软件自带的分立器件的封装。