opencv透视变换原理及实例
使用 opencv 中的特征匹配和透视变换
特征匹配和透视变换是计算机视觉领域中的重要技术,它们广泛应用于图像处理、目标识别、机器人导航等领域。
在opencv中,特征匹配和透视变换是两个非常重要的功能模块,能够帮助开发者实现各种复杂的图像处理任务。
本文将为大家介绍opencv中特征匹配和透视变换的相关知识和应用实例。
一、特征匹配特征匹配是计算机视觉领域中的一项基础技术,它的主要作用是在两幅图像中寻找相似的特征点,并将它们进行匹配。
在opencv中,特征匹配主要依靠SIFT(尺度不变特征变换)算法和SURF(加速稳健特征)算法来实现。
这两种算法都能够在图像中提取出关键点和它们的描述子,然后根据描述子的相似度来进行匹配。
特征匹配在图像配准、目标跟踪等领域中有着广泛的应用。
比如在图像配准中,我们可以利用特征匹配来将两幅图像进行配准,使它们在同一坐标系下对齐;在目标跟踪中,我们可以通过特征匹配来实现目标的快速识别和跟踪。
特征匹配是计算机视觉中非常重要的一环,它为图像处理和分析提供了基础支持。
二、透视变换透视变换是一种常用的图像变换技术,它可以将原始图像投影到一个新的空间中,从而实现图像的旋转、放缩、重构等操作。
在opencv 中,透视变换主要依靠透视变换矩阵来实现,该矩阵能够将原始图像的坐标映射到新空间中的坐标。
透视变换在计算机视觉领域中有着广泛的应用。
比如在图像校正中,我们可以利用透视变换来对图像进行校正,使其在视觉上更加真实和准确;在三维重构中,我们可以通过透视变换来还原三维场景的视图,从而实现对场景的深度理解和分析。
透视变换是计算机视觉中一个非常重要的图像处理技术,它为图像的变换和重构提供了重要手段。
三、opencv中的特征匹配和透视变换实例下面我们以一个例子来演示opencv中特征匹配和透视变换的应用。
假设我们有两幅图像A和B,我们希望通过特征匹配和透视变换将图像B对齐到图像A上。
1、我们利用SIFT算法在图像A和B中提取特征点,并计算它们的描述子。
opencv 多点计算透视变换矩阵
1. IntroductionOpenCV (Open Source Computer Vision Library) 是一款开源的计算机视觉和机器学习软件库,它提供了一系列丰富的图像处理和计算机视觉算法。
其中,多点计算透视变换矩阵是在图像处理中应用最为广泛的算法之一。
本文将介绍OpenCV中的多点计算透视变换矩阵的原理和应用。
2. 原理2.1. 透视变换矩阵透视变换矩阵是一个3x3的矩阵,它可以用来对图像进行透视变换,从而实现图像的旋转、缩放和扭曲等操作。
透视变换矩阵可以通过多个点对之间的映射关系来计算得到。
2.2. 多点对之间的映射关系在进行透视变换时,需要提供至少4对点之间的映射关系。
这些点通常表示图像上的四个角和它们在变换后的位置。
通过这些点之间的映射关系,可以计算出透视变换矩阵。
3. 应用3.1. 图像校正在摄影和图像处理中,常常需要对图像进行校正,使其更加符合实际的几何形状。
透视变换矩阵可以用来对图像进行透视矫正,从而达到去除畸变、纠正倾斜等效果。
3.2. 图像拼接在全景图像拼接中,需要对多个图片进行透视变换,使它们在同一个坐标系下显示。
透视变换矩阵可以帮助我们实现这一目标,从而得到完整的全景图像。
3.3. 视角转换在机器人、自动驾驶和增强现实等应用中,需要对图像进行视角转换,使其符合人类的视角或特定的坐标系。
透视变换矩阵可以帮助我们实现这一目标,从而方便后续的图像处理和识别。
4. 实例下面我们给出一个实际的例子来说明多点计算透视变换矩阵的应用。
假设我们有一张包含车牌的图像,现在我们要对车牌进行透视矫正,使其变得平整。
我们可以通过提取车牌的四个角点,并提供它们在矫正后的位置,来计算透视变换矩阵。
然后利用得到的透视变换矩阵,对车牌进行透视矫正,最终得到矫正后的车牌图像。
5. 总结多点计算透视变换矩阵是图像处理中一个重要的算法,它可以帮助我们实现图像的几何校正、图像拼接和视角转换。
在OpenCV中,我们可以通过提供多个点对之间的映射关系来计算透视变换矩阵,然后利用得到的矩阵对图像进行透视变换。
透视投影(Perspective_Projection)变换推导
透视投影是3D固定流水线的重要组成部分,是将相机空间中的点从视锥体(frustum)变换到规则观察体(Canonical View Volume)中,待裁剪完毕后进行透视除法的行为。
在算法中它是通过透视矩阵乘法和透视除法两步完成的。
透视投影变换是令很多刚刚进入3D图形领域的开发人员感到迷惑乃至神秘的一个图形技术。
其中的理解困难在于步骤繁琐,对一些基础知识过分依赖,一旦对它们中的任何地方感到陌生,立刻导致理解停止不前。
没错,主流的3D APIs如OpenGL、D3D的确把具体的透视投影细节封装起来,比如gluPerspective(…) 就可以根据输入生成一个透视投影矩阵。
而且在大多数情况下不需要了解具体的内幕算法也可以完成任务。
但是你不觉得,如果想要成为一个职业的图形程序员或游戏开发者,就应该真正降伏透视投影这个家伙么?我们先从必需的基础知识着手,一步一步深入下去(这些知识在很多地方可以单独找到,但我从来没有在同一个地方全部找到,但是你现在找到了)。
我们首先介绍两个必须掌握的知识。
有了它们,我们才不至于在理解透视投影变换的过程中迷失方向(这里会使用到向量几何、矩阵的部分知识,如果你对此不是很熟悉,可以参考可以找到一组坐标(v1,v2,v3),使得v = v1 a + v2 b + v3 c (1)而对于一个点p,则可以找到一组坐标(p1,p2,p3),使得p – o = p1 a + p2 b + p3 c (2)从上面对向量和点的表达,我们可以看出为了在坐标系中表示一个点(如p),我们把点的位置看作是对这个基的原点o所进行的一个位移,即一个向量——p – o(有的书中把这样的向量叫做位置向量——起始于坐标原点的特殊向量),我们在表达这个向量的同时用等价的方式表达出了点p:p = o + p1 a + p2 b + p3 c (3)(1)(3)是坐标系下表达一个向量和点的不同表达方式。
这里可以看出,虽然都是用代数分量的形式表达向量和点,但表达一个点比一个向量需要额外的信息。
python-opencv几何变换--仿射变换、透视变换
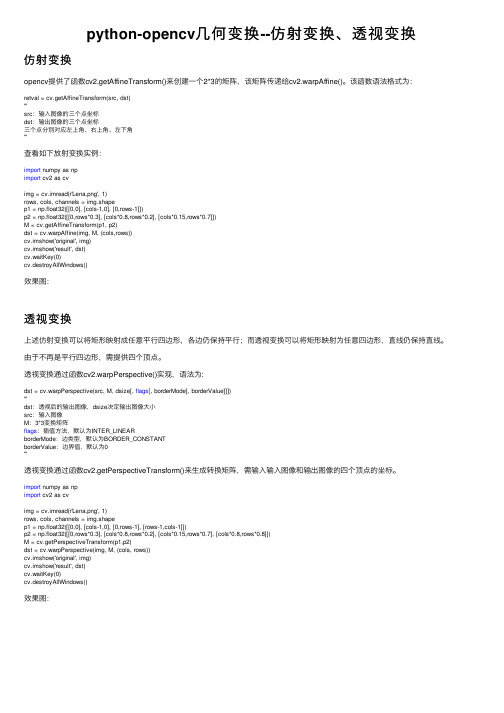
python-opencv⼏何变换--仿射变换、透视变换仿射变换opencv提供了函数cv2.getAffineTransform()来创建⼀个2*3的矩阵,该矩阵传递给cv2.warpAffine()。
该函数语法格式为:retval = cv.getAffineTransform(src, dst)'''src:输⼊图像的三个点坐标dst:输出图像的三个点坐标三个点分别对应左上⾓、右上⾓、左下⾓'''查看如下放射变换实例:import numpy as npimport cv2 as cvimg = cv.imread(r'Lena.png', 1)rows, cols, channels = img.shapep1 = np.float32([[0,0], [cols-1,0], [0,rows-1]])p2 = np.float32([[0,rows*0.3], [cols*0.8,rows*0.2], [cols*0.15,rows*0.7]])M = cv.getAffineTransform(p1, p2)dst = cv.warpAffine(img, M, (cols,rows))cv.imshow('original', img)cv.imshow('result', dst)cv.waitKey(0)cv.destroyAllWindows()效果图:透视变换上述仿射变换可以将矩形映射成任意平⾏四边形,各边仍保持平⾏;⽽透视变换可以将矩形映射为任意四边形,直线仍保持直线。
由于不再是平⾏四边形,需提供四个顶点。
透视变换通过函数cv2.warpPerspective()实现,语法为:dst = cv.warpPerspective(src, M, dsize[, flags[, borderMode[, borderValue]]])'''dst:透视后的输出图像,dsize决定输出图像⼤⼩src:输⼊图像M:3*3变换矩阵flags:插值⽅法,默认为INTER_LINEARborderMode:边类型,默认为BORDER_CONSTANTborderValue:边界值,默认为0'''透视变换通过函数cv2.getPerspectiveTransform()来⽣成转换矩阵,需输⼊输⼊图像和输出图像的四个顶点的坐标。
opencv透视变换原理

opencv透视变换原理OpenCV中的透视变换(Perspective Transformation)是一种将图像从一种透视投影变换到另一种透视投影的技术。
在计算机视觉中,透视变换通常用于对图像进行校正或将图像投影到平面上,以便后续处理。
透视变换的原理基于投影几何学中的矩阵变换。
在OpenCV中,透视变换通过使用cv2.getPerspectiveTransform()函数来计算一个3x3的变换矩阵,该矩阵可以将原始图像中的四个点映射到目标图像中的四个点,从而实现透视变换。
具体来说,假设我们有原始图像中四个关键点的坐标(x1,y1)、(x2,y2)、(x3,y3)和(x4,y4),以及目标图像中对应的四个关键点的坐标(x1',y1')、(x2',y2')、(x3',y3')和(x4',y4'),那么我们可以使用cv2.getPerspectiveTransform()函数来计算透视变换矩阵:schemeCopyM =cv2.getPerspectiveTransform(np.float32([(x1,y1),(x2,y2),(x3,y3),(x4,y4)]),np.float32([(x1',y1'),(x2',y2'),(x3',y3'),(x4',y4')])) 然后,我们可以使用cv2.warpPerspective()函数将原始图像应用于透视变换:Copydst = cv2.warpPerspective(img, M, (width, height))其中,img是原始图像,M是透视变换矩阵,width和height是目标图像的宽度和高度。
总之,OpenCV中的透视变换是一种将图像从一种透视投影变换到另一种透视投影的技术,它基于投影几何学中的矩阵变换。
通过使用cv2.getPerspectiveTransform()函数计算透视变换矩阵,然后使用cv2.warpPerspective()函数将原始图像应用于透视变换。
opencv 透视变换原理

透视变换(Perspective Transformation)是OpenCV中的一种变换方法,其原理是通过找到原始平面和目标平面之间的转换矩阵来实现的。
这个转换矩阵由四个点的坐标对确定,其中原始平面上的四个点对应于目标平面上的四个点。
具体来说,首先需要手动标记原始图像上的四个点,或者使用计算机视觉中的特征检测算法来自动找到这四个点。
接下来,确定目标平面上的四个点的坐标。
通常,目标平面是一个矩形或正方形,因此可以通过定义一个矩形或正方形的四个顶点来确定目标平面上的四个点的坐标。
一旦获得了原始平面和目标平面上的四个点的坐标,就可以使用这些坐标来计算透视变换的转换矩阵。
OpenCV提供了一个函数“cv2.getPerspectiveTransform()”来计算这个转换矩阵。
这个函数需要原始平面上的四个点的坐标和目标平面上的四个点的坐标作为输入,并返回一个3x3的转换矩阵。
有了转换矩阵,就可以使用OpenCV中的另一个函数“cv2.warpPerspective()”来实施透视变换。
这个函数需要原始图像、转换矩阵和目标图像的大小作为输入,并返回一个经过透视变换的图像。
透视变换的过程可以总结为以下几个步骤:1)找到原始平面上的四个点的坐标;2)找到目标平面上的四个点的坐标;3)使用这些坐标来计算透视变换的转换矩阵;4)使用转换矩阵对原始图像进行透视变换。
透视变换在计算机视觉中有广泛的应用,其中一个常见的应用是校正图像中的透视畸变,例如校正从一个角度拍摄的文档图像。
通过应用透视变换,可以使文档图像看起来像是平面上的正视图。
透视变换也可以用于图像合成,将一个平面上的图像合成到另一个平面上的图像中。
opencv 逆透视变换原理
opencv 逆透视变换原理
逆透视变换(inverse perspective transform)也称为鱼眼矫正,
是指将透视变换后的图像还原成原始视角的图像。
在计算机视觉中,逆透视变换被广泛应用于自动驾驶、机器人导航等领域。
逆透视变换的实现要用到相机模型和坐标变换。
相机模型可以描述相机的内参(标定矩阵、畸变参数等)和外参(相机的位置和姿态等),而坐标变换则可以将图像坐标转换为世界坐标或相机坐标。
具体来说,逆透视变换的实现步骤如下:
1. 读取原始图像,并提取感兴趣区域(ROI)。
2. 根据相机模型,计算出透视变换矩阵。
3. 对ROI进行逆透视变换。
4. 使用缩放和平移等操作将变换后的ROI放回原始图像的位置。
5. 将整张图像中不相关的区域填充为黑色,从而得到逆透视变换后的图像。
逆透视变换的原理比较复杂,需要涉及到很多数学知识和图像处理技术。
但是,OpenCV提供了丰富的函数和类库,使得开
发者可以快速地实现逆透视变换,并将其应用于各种实际应用场景中。
透视变换和仿射变换应用案例
透视变换和仿射变换应用案例一、透视变换应用案例。
1. 摄影中的矫正。
你有没有拍过那种建筑照片,就是把相机仰着拍高楼大厦的时候,大楼看起来是斜的,就像要倒了似的。
这时候啊,透视变换就超级有用啦。
比如说你拍埃菲尔铁塔,从塔下面往上拍,塔脚宽塔顶窄。
通过透视变换呢,就能把这个照片矫正过来,让塔看起来就像正正地立在那儿,四条边都是垂直和平行的,就像你把眼睛放在和塔底平行的位置去看它一样。
2. 车牌识别。
你想啊,摄像头拍车牌的时候,因为拍摄角度的问题,车牌在图像里可能是歪歪扭扭的。
这个时候如果要识别车牌上的字,就很麻烦。
透视变换就像一个魔法,它可以把这个歪着的车牌图像变成那种看起来就像是正对着车牌拍的图像。
就好比把一个斜着的纸牌给掰正了,这样计算机识别车牌上的数字和字母就容易多啦。
3. 增强现实 (AR) 游戏。
在那些超酷的AR游戏里,透视变换也有大作用。
比如说你在玩一个把虚拟的小精灵放在现实场景里的游戏。
如果你的手机摄像头拍的现实场景有透视变形,小精灵放上去就会看起来很奇怪,像是站在斜面上或者扭曲的空间里。
通过透视变换把现实场景的图像矫正成正常的视角,小精灵就能很自然地出现在场景里啦,就好像它真的在你的客厅里一样,而不是在一个歪歪扭扭的异次元空间。
4. 室内设计软件。
当你用室内设计软件的时候,你可能从一个角落拍摄了房间的照片,然后想把新的家具模型放进去看看效果。
但是照片里房间的形状因为透视是变形的。
透视变换可以把这个照片变成好像是从正上方或者正前方拍摄的样子,这样家具模型就能准确地放到房间里合适的位置了。
就像给房间的照片做了一个整形手术,让它变得规规矩矩的,方便你摆弄那些虚拟的家具。
二、仿射变换应用案例。
1. 图像缩放与旋转。
想象你有一张超搞笑的表情包,但是它太大了,你想把它变小一点放到聊天框里。
仿射变换就像一个小魔法师,它可以把这个表情包按照比例缩小,而且不会让表情包里的图案变形得很奇怪。
还有啊,如果你想把这个表情包旋转一下,比如把一个正着的猫猫表情包转成斜着的,看起来更俏皮,仿射变换也能轻松搞定。
透视变换原理
透视变换原理
透视变换是一种用于图像处理和计算机视觉的技术,用于将平面图像转换为透视或透视投影的效果,以模拟人眼所感知到的透视效果。
透视变换的原理是基于成像原理和相机模型的基础上进行的。
在相机模型中,通过视点、投影面和物体之间的关系来描述透视效果。
在成像原理中,相机通过光线将物体的信息投影到感光元件上,形成一个二维的图像。
透视变换主要涉及到三个方面的变换:位移、旋转和缩放。
位移变换用于调整图像在平面上的位置,旋转变换用于调整图像在平面上的方向,而缩放变换则是调整图像在平面上的大小。
通过这些变换,可以将平面上的图像映射到一个透视投影的效果上。
透视变换的过程中,首先需要确定相机的参数,包括视点位置、投影面的位置和大小等。
然后,利用相机模型和成像原理,计算出每个像素在透视投影平面上的位置。
最后,根据计算得到的位置信息,将原始图像上的像素映射到透视投影平面上,得到最终的透视变换效果。
透视变换在计算机图形学、虚拟现实、增强现实等领域有着广泛的应用。
它可以用于场景重建、虚拟漫游、物体跟踪等任务中,能够为用户提供更加真实、直观的图像体验。
图像透视变换原理与实现
图像透视变换原理与实现仿射变换和透视变换仿射变换是把⼀个⼆维坐标系转换到另⼀个⼆维坐标系的过程,转换过程坐标点的相对位置和属性不发⽣变换,是⼀个线性变换,该过程只发⽣旋转和平移过程。
因此,⼀个平⾏四边形经过仿射变换后还是⼀个平⾏四边形。
所以,仿射= 旋转 + 平移透视变换是把⼀个图像投影到⼀个新的视平⾯的过程,该过程包括:把⼀个⼆维坐标系转换为三维坐标系,然后把三维坐标系投影到新的⼆维坐标系。
该过程是⼀个⾮线性变换过程,因此,⼀个平⾏四边形经过透视变换后只得到四边形,但不平⾏。
透视变换的变换关系如下:下⾯是通过变换关系和调⽤opencv得到的透视变换的代码例⼦:import cv2import numpy as nppath = 'img/a.png'def show(image):# image = cv2.resize(image, (0, 0), fx=0.5, fy=0.5)cv2.imshow('image', image)cv2.waitKey(0)cv2.destroyAllWindows()def pointInPolygon(x, y, point):j = len(point) - 1flag = Falsefor i in range(len(point)):if (point[i][1] < y <= point[j][1] or point[j][1] < y <= point[i][1]) and (point[i][0] <= x or point[j][0] <= x):if point[i][0] + (y - point[i][1]) / (point[j][1] - point[i][1]) * (point[j][0] - point[i][0]) < x:flag = not flagj = ireturn flagdef draw_line(image, point, color=(0, 255, 0), w=2):image = cv2.line(image, (point[0][0], point[0][1]), (point[1][0], point[1][1]), color, w)image = cv2.line(image, (point[1][0], point[1][1]), (point[2][0], point[2][1]), color, w)image = cv2.line(image, (point[2][0], point[2][1]), (point[3][0], point[3][1]), color, w)image = cv2.line(image, (point[3][0], point[3][1]), (point[0][0], point[0][1]), color, w)return imagedef warp(image, point1, point2):h, w = image.shape[:2]print(h, w)img1 = np.zeros((int(point2[2][0]), int(point2[2][1]), 3), dtype=np.uint8)M = cv2.getPerspectiveTransform(point1, point2)for i in range(h):for j in range(w):# if pointInPolygon(j, i, point1):x = (M[0][0]*j + M[0][1]*i + M[0][2]) / (M[2][0]*j + M[2][1]*i + M[2][2]) + 0.5y = (M[1][0]*j + M[1][1]*i + M[1][2]) / (M[2][0]*j + M[2][1]*i + M[2][2]) + 0.5x, y = int(x), int(y)# print(x, y)if 1 <= x < point2[2][0]-1 and 1 <= y < point2[2][1]-1:img1[y, x, :] = image[i, j, :]img1[y, x-1, :] = image[i, j, :]img1[y, x+1, :] = image[i, j, :]img1[y-1, x, :] = image[i, j, :]img1[y+1, x, :] = image[i, j, :]img2 = cv2.warpPerspective(image, M, (300, 300))img = np.hstack((img1, img2))show(img)def main():image = cv2.imread(path)img = image.copy()point1 = np.float32([[348, 183], [549, 191], [580, 613], [332, 618]]) point2 = np.float32([[0, 0], [300, 0], [300, 300], [0, 300]])warp(image, point1, point2)img = draw_line(img, point1)images = np.hstack((image, img))show(images)# point1 = np.float32([[348, 183], [549, 191], [580, 613], [332, 618]]) # point2 = np.float32([[0, 0], [300, 0], [300, 300], [0, 300]])# M = cv2.getPerspectiveTransform(point1, point2)# print(M.shape)# print(M)# img = cv2.warpPerspective(image, M, (300, 300))# show(img)if __name__ == '__main__': main()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
所以,已知变换对应的几个点就可以求取变换公式。反之,特定的变
换公式也能新的变换后的图片。简单的看一个正方形到四边形的变换:
变换的4组对应点可以表示成:
根据变换公式得到:
定义几个辅助变量:
都为0时变换平面与原来是平行的,可以得到:
不为0时,得到:
求解出的变换矩阵就可以将一个正方形变换到四边形。反之,四边形
cvtColor(im,gray,CV_BGR2GRAY);
Canny(gray,gray,100,150,3);
opencv透视变换原理及实例
透视变换(PerspecTIveTransformaTIon)是将图片投影到一个新的视
平面(ViewingPlane),也称作投影映射(ProjecTIveMapping)。通用的变换
公式为:
u,v是原始图片左边,对应得到变换后的图片坐标x,y,其中
x=x/w,y=y/w。变换矩阵
变换到正方形也是一样的。于是,我们通过两次变换:四边形变换到正方形+
正方形变换到四边形就可以将任意一个四边形变换到另一个四边形。
具体流程为:
a)载入图像→灰度化→边缘处理得到边缘图像(edgemap)
cv::Matim=cv::imread(filename);
cv::MatLeabharlann ray;可以拆成4部分,(a11,a12,a13,a14)表示线性变换,比如
scaling,shearing和ratoTIon。(a31,a32)用于平移,(a13,a23)T产生透
视变换。所以可以理解成仿射等是透视变换的特殊形式。经过透视变换之后
的图片通常不是平行四边形(除非映射视平面和原来平面平行的情况)。