第五章 阵列信号的高分辨处理
阵列信号处理
B
B
1 有 zB t 2
B
2
z e jt d z B t
因此
s r , t z B t e j0t e j0 s 0, t e j0
2
小结: 信号带宽足够小使得波到达 r 处时的复包络基本 不变。 T r 表示了波传播的空间信息(方向、位置), 它仅含于载波项中,而与信号复包络无关。
s exp[ j t r ]d
T
这里函数 s 是任意的,只要其Fourier变换存在即 可。该式表达了沿同一方向 传播的任意波形(信 号),其频率分量任意。
B. 波动方程球坐标系中的解
球坐标系 r , , ,但是,当波动方程的解具有球形 对称时,函数s r , , , t 并不依赖于 和 ,使解简化, 这时波动方程可简化为:
T
波动方程的任意解可以分解为无穷多个“单频” 解的迭加(传播方向和频率分量均任意)。
波动方程的单频解可以写成单变量的函数:
s r , t A exp[ j (t k r ) A exp[ j t r ]
T T
k ,其大小等于传播速度的倒数,其方向与 式中
时间频率 空间频率
b) 任意解:由四维Fourier变换表示: j t k r 1 s r, t s u , e d kd 4 2 j t k r s k , s t , r e d rdt 其中
T
a t 带宽越宽,信号起伏越快。窄带条件即要求a t cos 变化比 0t t 变化慢。
阵列信号处理原理、方法与新

阵列信号处理原理、方法与新
阵列信号处理是一种利用多个传感器(如麦克风、天线等)获取信号,通过信号处理
算法将其合成为一个复合信号,并在此基础上分离、定位、去除、增强等操作的新型信号
处理技术。
在目前的通信、雷达、声学、医学等领域都有广泛应用。
阵列信号处理的基本原理是通过获取多个传感器采样的信号,根据它们的相对位置和
接收到信号的时间差异,构建一个信号阵列,然后通过信号合成的方法将这些信号合成为
一个复合信号。
根据复合信号的特征,进行后续的信号处理。
阵列信号处理的主要方法包括波束形成、空间滤波、方向估计等。
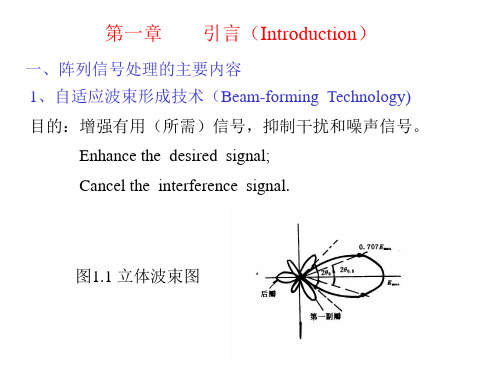
波束形成的主要目
的是聚焦探测器的接收能力,使其在目标方向上获得更高的灵敏度。
空间滤波的主要目的
是通过利用阵列传感器之间的相对位置和互相之间的传感器响应差异,对信号进行滤波,
达到抑制噪声、增强信号等效果。
方向估计则是通过对信号在阵列中传播的速度和波束方
向的监测,对信号的方向进行估计。
阵列信号处理技术的应用十分广泛,其中最为常见的应用领域是通信、雷达和声学等。
在通信中,利用阵列信号处理技术进行信号增强和去除干扰,并根据信号的传播速度和方
向进行信号定位和跟踪。
在雷达中,利用阵列信号处理技术对雷达信号进行波束形成和目
标方向估计,提高雷达的探测效率和目标定位精度。
在声学中,利用阵列信号处理技术进
行声波信号的定位、分离和降噪等操作,提高语音识别和音频娱乐的质量。
总之,阵列信号处理技术是一种高效、可靠的信号处理方法,可以广泛应用于各个领域,有着十分重要的实际应用价值。
阵列信号处理技术
动通信的用户很多,一方面通过空间不同位置进行区分,另 一方面通过不同的编码等方法实现多用户和大容量。 现代超分辨技术,使系统能够分辨空间和时间上都很靠 近的信号。
概括起来说:
波束的控制和管理
时间和空间信号的高分辨 五、主要研究内容 1、阵列构形研究 均匀直线阵、平面阵、元阵、随机阵、共形阵。 2、波束形成和超分辨新方法的研究(不是热点)
军用雷达:
火炮雷动:炮位侦校雷达、炮瞄雷达
战场侦察雷达:(坦克、直升机等目标的检测与识别)
步兵侦察雷达:
空中警戒雷达:(对空监视雷达) 机载雷达气象雷达: 天气预报、人工降雨)
探地雷达: (探测地下管道,检查高速公路施工质量,
接收信号
X T = [ x1 , x 2 , L , x N ]
(2.1.1)
方向图形成网络: W = [ w1 , w 2 , L , w N ]
(2.1.2)
(形成最优权 和系统输出)
y(t ) = W T X = X T W
(2.1.3)
自适应处理器: ( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题:
0 ≤ t ≤ T
(2.2.5)
所需信号和噪声的矢量可以表达为:
s1 (t ) S (t ) = 2 M s N (t )
n1 (t ) n (t ) = 2 M n N (t )
0 ≤ t ≤ T
所需信号分量可精确已知,粗略近视已知,或仅在统计意 义上已知。
3、理想的传播模型
3、应用性研究(热点)
在一个具体的领域或工程项目上,如何应用这些理论和
方法,实际系统的误差很大,比如阵列通道之间的性能差异, 频率特性,阵列传感器的位置误差等情况下的一些理论算法 和性能。
FBG-FP阵列的高空间分辨率高精度分布式传感研究

摘要光纤传感技术以其独特的优势,成为目前智能结构健康监测技术中研究较为广泛的技术。
针对大型结构、复合材料内部裂纹、金属结构腐蚀等主要损伤类型,由于其具有隐蔽性强、结构失效机理复杂、结构破坏程度难以判断等特点,需进行超高空间分辨率、复用容量大、精度高的传感检测。
本文采用间距极小的超短弱反射的光纤光栅(Fiber Bragg Grating,FBG)构筑的光纤光栅法布里珀罗(Fiber Bragg Grating Fabry-Perot,FBG-FP)阵列搭建传感网络,基于光频域反射技术搭建传感光路,通过对解调原理、解调算法和实验验证等相关问题的研究,实现一种具有超高空间分辨率、超大容量、高精度的全分布式光纤传感新方法与新技术。
主要研究内容如下:(1)FBG-FP阵列的传感机理与复用容量研究。
以FBG的耦合模式方程为基础推导FBG-FP的光谱数学表达式,并分析其温度和应变的传感机理。
数值模拟多重反射效应和光谱阴影效应对FBG-FP传感阵列的复用极限的制约,证明降低反射率可抑制上述两种效应,并进一步提出采用光栅间隔不小于栅长和中心波长随机分布的传感阵列可分别抑制多径反射效应和光谱阴影效应,其中波长随机分布对传感没有坏的影响。
(2)FBG-FP阵列的分布式传感解调系统的研究。
提出基于光频域反射(Optical Frequency-domain Reflectometry,OFDR)技术的FBG-FP阵列的分布式解调系统。
一方面研究传感单元高空间分辨率的定位方法,通过对可调谐光源的非线性调谐效应进行补偿,在50m的传感距离内实现82μm内的超高空间分辨率;通过计算等效光频域调谐速率和可调谐光源的时间波长转换轴,提高系统的定位稳定度和波长解调精度。
另一方面研究传感单元的波长解调方法,推导FBG-FP光谱重构的数学表达式,提出FBG-FP阵列的分布式传感解调算法。
(3)裂纹尖端检测。
温度实验测试系统解调性能,实现8557个长度为400μm、间隔为440μm、反射率约为-42dB的FBG构成的超短弱反射的FBG-FP阵列传感,传感解调空间分辨率达到840μm,温度解调精度小于0.65℃。
阵列信号处理概述研究背景及意义和波达方向估计技术

阵列信号处理概述研究背景及意义和波达方向估计技术1 概述阵列信号处理作为信号处理的一个重要分支,在通信、雷达、声呐、地震、勘探、射电天文等领域获得了广泛应用和迅速发展。
对所有探测系统和空间传输系统,空域信号的分析和处理是其基本任务。
将多个传感器按一定方式布置在空间不同位置上,形成传感器阵列。
并利用传感器阵列来接收空间信号,相当于对空间分布的场信号采样,得到信号源的空间离散观测数据。
阵列信号处理的目的是通过对阵列接收的信号进行处理,增强所需要的有用信号,抑制无用的干扰和噪声,并提取有用的信号特征以及信号所包含的信息。
与传统的单个定向传感器相比,传感器阵列具有灵活的波束控制、高的信号增益、极强的干扰抑制能力以及高的空间分辨能力等优点,这也是阵列信号处理理论近几十年来得以蓬勃发展的根本原因。
阵列信号处理的最重要应用包括:①信(号)源定位——确定阵列到信源的仰角和方位角,甚至距离(若信源位于近场);②信源分离——确定各个信源发射的信号波形。
各个信源从不同方向到达阵列,这一事实使得这些信号波形得以分离,即使他们在时域和频域是叠加的;③信道估计——确定信源与阵列之间的传输信道的参数(多径参数)。
阵列信号处理的主要问题[]1包括:波束形成技术——使阵列方向图的主瓣指向所需方向;零点形成技术——使天线的零点对准干扰方向;空间谱估计——对空间信号波达方向的分布进行超分辨估计。
空间谱估计技术是近年来发展起来的一门新兴的空域信号处理技术,其主要目标是研究提高在处理带宽内空间信号(包括独立、部分相关和相干)角度的估计精度、角度分辨率和提高运算速度的各种算法。
在所有利用空间谱估计技术来实现对到达方向(DOA)估计的方法中,以R. O. Schmidt 提出的MUSIC 算法最为经典且最有代表性。
Schmidt 在MUSIC 算法中提出了信号子空间的概念,即在维数大于信号个数的观测空间中进行子空间的划分,找出仅由噪声贡献生成的空间(噪声子空间)和由信号和噪声共同作用产生的空间,根据这两个子空间的基底以及阵列流型即可得到待测方向满足的方程,由其解得到来波方向的估计。
阵列信号处理(知识点)

信号子空间:设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑在无噪声条件下,()()()()()12,,,P x t span a a a θθθ∈称()()()()12,,,P span a a a θθθ 为信号子空间,是N 维线性空间中的P 维子空间,记为P NS 。
PN S 的正交补空间称为噪声子空间,记为N P N N -。
正交投影设子空间m S R ∈,如果线性变换P 满足,()1),,,2),,,0m mx R Px S x S Px x x R y S x Px y ∀∈∈∀∈=∀∈∀∈-=且则称线性变换P 为正交投影。
导向矢量、阵列流形设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑,其中矢量()i ia θ称为导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号A 表示,即(){|(0,2)}a A θθπ=∈波束形成波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即()()()()HHy t W X t s t W a θ==,通过加权系数W实现对θ的选择。
最大似然已知一组服从某概率模型()f X θ的样本集12,,,N X X X ,其中θ为参数集合,使条件概率()12,,,N f X X X θ 最大的参数θ估计称为最大似然估计。
不同几何形态的阵列的阵列流形矢量计算问题假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1[1]i a θ=然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差n ∆,则确定其导向矢量()2jn i a eπλθ∆=最后形成N 元阵的阵列流形矢量()11221N j j N Pe A e πλπλθ-∆∆⨯⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦ 例如各向同性的NxM 元矩形阵,阵元间隔为半个波长,当信源与阵列共面时:首先建立阵列几何模型:对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为(1)sin()(1)cos()mn i i n d m d θθ∆=---故:()1122(sin()cos())22((1)sin()(1)cos())11N j j d j j d N M NM P NM Pe e A e e ππθθλλππθθλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦而当信源与阵列不共面时: 首先将信源投影到阵列平面然后建立阵列模型对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为[(1)sin()(1)cos()]sin()mn i i i n d m d θθϕ∆=-+-故:()1122(sin()cos())cos()22((1)sin()(1)cos())cos()11N j j d j j d N M NM P NM Pe e A e e ππθθϕλλππθθϕλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦线性约束最小方差准则(LCMV )的自适应波束形成算法: 对于信号模型:()()()0X t s t a J N θ=++, 波束形成输出:()()()()0()H H H yt W X t s t W a W J N θ==++LCMV 准则实际上是使()0HW a θ为一个固定值的条件下,求取使得()HWJ N +方差最小的W 作为最有权值,即:()0min .H X WHW R Ws t W a Fθ⎧⎪⎨⎪=⎩,其中F 为常数利用拉格朗日乘子法可解得:()10X opt W R a μθ-=当取1F =时,则()()11H X a R a μθθ-=,μ的取值不影响SNR 和方向图。
阵列信号处理

阵列信号处理是信号处理的一个年青的分支,属于现代信号处理的重要研究内容之一,其应用范围很广,可用于雷达、声呐、通信、地震勘察、射电天文和医用成像等众多领域。
阵列信号处理是将一组传感器在空间的不同位置按一定规则布置形成的传感器阵列(尽管采用的传感器的类型可以不同,如天线、水听器、听地器、超声探头、X射线检测器,但是传感器的功能是相同的,它是连接信号处理器和感兴趣的空间纽带),用传感器阵列发射能量和(或)接收空间信号,获得信号源的观测数据并加以处理。
阵列信号处理的目的是从这些观测数据中提取信号的有用特征,获取信号源的属性等信息。
目前,阵列信号处理在雷达及移动通信等领域有着广泛而重要的应用。
在相控阵雷达体制中,自适应波束形成技术在抑制杂波干扰方面起着关键的作用。
在移动通信中,基于阵列信号处理的波达方向估计技术,使移动通信进入一个崭新的阶段。
本论文首先介绍阵列信号处理的基础知识。
在此基础上,着重讨论阵列波束形成技术,非理想线性阵列的雷达信号波达方向和多普勒频率估计,均匀圆形阵列的信号波达方向估计和复杂信号的波达方向及参数估计等四方面内容。
这些内容都是阵列信号处理领域的研究热点。
它们无论对阵列信号处理的理论发展还是实际应用,都有重要的意义。
目前,人们普遍关注在阵列响应矢量未知情况下,自适应波束形成问题,即盲自适应波束形成技术。
本文第一方面介绍了最基本的阵列波束形成方法,即最小均方误差波束形成器,线性约束最小方差波束形成器和基于特征空间的波束形成器(ESB)。
在此基础上,提出一个基于特征空间的盲自适应波束形成算法。
此算法首先根据高分辨波达方向估计方法,估计信号源的波达方向,然后以此方向形成约束导向矢量,进而计算出ESB波束形成算法的最优权矢量,最后,对期望目标形成笔状波束。
此算法能够有效地抑制信号的对消现象,并且能够应用于在波束中有多个期望信号的场合。
当阵列存在各种误差时,一般高分辨波达方向估计方法(如MUSIC)的估计性能严重下降。
阵列信号处理的基本知识分析
diag{g ej1 ,, g e } jM
1
M
阵元之间的互藕 有关因素:阵元之间的间距大小,系统工作 频段,采用的传感器类型等。 设所有阵元之间的藕合系数矩阵为C,则考 虑到阵元间互藕的阵列输出信号模型为:
x(t) CAs(t) n(t)
阵元位置 阵元测向的关键信息是空间信号入射到各阵 元的相对延迟相位,而这一相位依赖于阵元 之间的空间位置,阵元位置误差直接导致延 迟相位估计误差,从而影响信号参数估计。
信号参数估计(DOA,频率,极化参数,距离, 时延等): 谱估计方法(子空间方法,波束形成 方法),参数化方法(最大似然,基于子空间逼 近方法)。
Ref[1] H.krim and M.Viberg, Two decdees of array processing research: the parametric approach, IEEE signal processing Magazine, Vol.13, Vol.4, 1996. Ref.[2] D.H.Johnson, D.E.Dudgeon, Array signal processing, Prentice-Hall,1993. Ref.[3] IEE Proc. 1991. Ref.[4] Vaccaro, R.J, The past, present, and the future of underwater acoustic signal processing, IEEE Signal Processing Magazine, Vol.15 , No.4 , 1998.
-25
-30
-35
-40
-45
-50
-80 -60 -40 -20
0
20
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
i 1
P N
N P NN 只是数学上的定义,并非物理上的噪声。
西安电子科技大学雷达信号处理实验室
分析: 信号子空间:span a 1 , a 2 ,, a P 对于等距线阵(ULA) T
2 d j sin a 1 e
j
2 d
sin 1
j
2 d
sin 2
,则 a 1
P 当信号子空间已知( S N ),进行方向估计方法:
N P N 用 a 为搜索矢量,向 S 上做投影,或向 N 做
投影。
P N
N P 定理:a 在 N N 上投影矢量长度等于零的充要 P 条件为 1, 2 , , P , ,或 a 在 S N 上投影矢 量就是自己本身的充要条件为 1, 2 , , P ,
优点:完全避开了在一般非理想的情下,MUSIC方法必须面 对的识别大特征值和小特征值的麻烦,容许小特征值有多 个取值,始终以最小特征值作为噪声特征值,从而使其对 应的特征向量所生成的噪声子空间不受信噪比的变化和阵 元数及快拍数限制的影响,始终与阵列的导向矢量保持最 严格的正交关系。特征矢量用得越少,分辨力越好。
单信源
E x1 t x t e 2 d 在不模糊的情况下( 可以测定。 sin 2 ),
* 2 2 s
j
2 d
sin
在保证不模糊的情况下,天线离越远越好。 d,
精度提高,这是因为 3dB
西安电子科技大学雷达信号处理实验室
0.886 (rad ) L cos 0
2. 波束扫描
波束形成: y t W x t
H
普通波束形成(匹配滤波)W a 0
y t a
0 x t H a 0 s t a 1 H s t a 0 a 1
H
扫描指: 0 变化在 [0,180] 范围内,画出输出功 率随扫描角度变化的图形。 问题:虽可测多个信源,但当多个信源的夹角小 于一个波束宽度时,无法分辨。 波束宽度与阵列孔径成反比,又称为瑞利限。
解,从而得到与信号分量相对应的信号子空间和与信号分量 正交的噪声子空间,然后利用这两个子空间的正交性来估计 信号的参数。
窄带远场的信号模型: X (t ) A( )s(t ) N (t ) 则 R E[ XX ] AE[SS ]A 2 I ARs A 2 I
5) 计算谱峰:S
1 Pn a
1
i P 1
N
a
H
vi
2
N P N 谱峰与信号强度无关,只反映 a 与 N 的正交性。
西安电子科技大学雷达信号处理实验室
值得注意的是:
1. 非理想情况下得到的协方差矩阵的特征值满足:
1 2 N N 1 M
∴有P个非零特征值 1 2 p 0
N 个特征矢量 另有 N P 个零特征值,
v1 , v 2 , , v p , v p 1 ,, v N
非零 N-P个零特征值
西安电子科技大学雷达信号处理实验室
对 R A R s A n2 I 的特征分解为
用 W opt
1 1 R a 为权系数进行波束扫描。 H 1 a R a
H opt
阵列波束形成的输出功率为
SC W
^
RW opt
由于信号和噪声相互独立,数据的协方差矩阵可以分解为与 信号和噪声相关的两部分,大特征值对应的特征矢量张成的 空间称为信号子空间,理想条件下,信号子空间和噪声子空 间是相互正交的。
西安电子科技大学雷达信号处理实验室
Music方法步骤: ^ 1) 由阵列数据 x ti 估计相关矩阵 R 1
2) 对 R 作特征分解。
缺点:稳健性差
西安电子科技大学雷达信号处理实验室
仿真结果:来波方向为 30 ,34 , 40
西安电子科技大学雷达信号处理实验室
§ 5.3子空间高分辨处理与波束形 成方法比较
1. 波束扫描法
常规波束形成方法: arg max S aH Ra
^
最优波束形成方法:(LCMV法) 最优权: min W H RW W
(但是不能推出 vi a i )
或 R 的 N P 个小特征值对应的特征矢量 v p1 ,, v N
N P 张成 N N 。
西安电子科技大学雷达信号处理实验室
Music----Multiple Signal Classification(多重信号分类法)
基本思想:将任意阵列输出数据的协方差矩阵进行特征分
Music算法实质是基于一维搜索的噪声子空间算法
西安电子科技大学雷达信号处理实验室
基于解相干的Music算法:
Music算法在理想条件下具有良好的性能,但在信号源相 干时算法变得很坏。 极端地,当信号完全相干时,阵列接收数据的协方差矩阵 的秩降为1,显然这会导致信号子空间的维数小于信号源数, 也就是说信号子空间“扩散”到噪声子空间,这会导致某些相 干源的导向矢量与噪声子空间不完全正交,从而无法正确估计 信号源方向。 此时,核心问题就是解相干或去相干,主要方法有: 降维处理 空间平滑:对修正后的协方差方阵特征分解 矩阵重构:对修正后的协方差长方阵奇异分解
H
x ti x
i 1
M
H
ti
A R s A
H
n2 I
满秩
假定 E N t N
E s t s
H
H
2 t n I
t Rs
H
先对矩阵作特征分解 A Rs A
西安电子科技大学雷达信号处理实验室
下面给出简单证明
西安电子科技大学雷达信号处理实验室
P 证明:N维矢量 a 向 S N 上投影。
“ ”:显然 ∵ a span a 1 , a 2 ,, a P
N P P N S Pn ) “ ”:记向 N (或 N )投影矩阵为 P (或 s
e
N 1 T
j
2 d
N 1 sin
1 Z Z
其中
1 xN 2 xN N 1 xN
Z e
j
2 d
sin
1 范德蒙矩阵: x1 M x12 N 1 x 1
西安电子科技大学雷达信号处理实验室
§ 5.2正交子空间投影与高分辨处理
1. 信号子空间与噪声子空间的定义
信号模型: N元阵接收p个信源
x t si t a i i N t
p
无噪声条件下: x t span a 1 , a 2 ,, a P 定义span a 1 , a 2 ,, a P 为信号子空间,是N维 P 线性空间中的P维子空间,记为 S N 。
而不满足 1 2 N N 1 M 2
2. 由于 UsUs UnUn I ,表明利用噪声子空间进行信 号参数估计与利用信号子空间进行估计是一致 的。 3.
ˆ 0 a 当 a( ) 属于信号子空间时, ( )U ,此时空 n
间谱会在信号源方向出现“谱峰”。
* E s t s 特例:P个信号独立, i j t 0
i j
12 0 2 2 Rs 2 P 0 s21 0 p H H 2 A A a a si i i i 1 2 0 sp
M
x ti x
i 1
M
H
ti
P 或用 N P 3) 用 P 个大特征值对应的特征矢量构成 S N 个小特征值对应的特征矢量构成 N N P
N N P作投影 4) 用搜索矢量 a 向 N N
N H Pn a vi vi a i P1
H
有P个大特征值
2 2 2 2 2 1 n 2 n P n n n N P个
可以证明:P个大特征值对应的特征矢量 v1, v2 ,, v p P S 张成信号子空间 N
span v1 , v 2 , , v p span a 1 , a 2 , , a P
1 x2
2 x2
N 1 x2
是满秩的充要条件为 xi x j ,当i j 。
西安电子科技大学雷达信号处理实验室
已知 a 1 和 a 2 ,则只要 和 a 2 线性无关,
e a a 1 sin 1 sin 2时, d 和 2 线性无关。 即当 , 2 e
1 P
西安电子科技大学雷达信号处理实验室
P N 1
P N P S 2. N或 N N 的建立
已知:N元阵列接收的一批数据 x ti
i 1, 2,, M
由 x t A s t N t 计算相关矩阵
1 R E x t x t M
Pቤተ መጻሕፍቲ ባይዱ a a
则 a span a 1 , a 2 ,, a P
i , i 1 ~ P 反证:假设,
即 a , a 1 , , a P 线性相关( P + 1 个导向 矢量)。 a , a 1 , , a P 应线性独 而当 P 1 N 时, 立。矛盾。
非降维处理