东汽风机控制系统样本
风机电气控制系统word精品文档15页
风机电气控制系统新誉风电公司目录1.电气控制系统概述(可参考控制系统使用说明书)2.风机发电控制方法3.风机监视控制4.接线原理图5.机舱柜和塔筒柜6.安全系统的概念7.风机故障(故障等级、引起的停机种类、故障清除的种类)8.风机的自耗功率9.风机的操作1.电气控制系统概述电气控制系统包括如下内容(其中塔筒柜和机舱柜一起构成风机主控系统):塔筒柜、机舱柜、变桨控制系统、变流器、发电机的控制和监视部分、齿轮箱的电气部分、液压站和高速轴刹车的电气部分、偏航电气部分、风机的传感器部分。
塔筒柜部分包括控制器PLC(带中央处理器模块)、控制开关、电网检测、UPS 电源、HMI触摸屏(人机界面)、变流器控制接口。
机舱柜部分包括控制器PLC的远程输入输出模块(不带中央处理器)、控制开关、保护电路、与发电机控制和监视的接口电路、与齿轮箱电气部分的接口电路、液压站和高速轴刹车电气接口电路、偏航控制电路、风机传感器接口、与变桨系统的接口电路。
变桨系统包括变桨控制柜和伺服执行系统,变桨系统作为主控制系统的执行机构,其任务是根据风机主控制器的指令完成执行变桨操作,以及在非安全的情况下(如与风机主控失去通讯,电网故障,安全系统故障等)完成快速收桨动作。
变桨系统本身是一套伺服系统。
整个系统包括伺服驱动器(3套独立的)、电机、备用电池柜(三套独立的)及其他部件如限位开关、传感器、配电柜等。
发电机和变流器是实现机械能往电能转换的机构,控制系统通过控制发电机的转矩和转速来控制风机发电功率。
齿轮箱、液压站和高速轴刹车的电气接口是用来检测这些部件的状态并控制这些部件的运行。
偏航电气部分是用来控制系统的偏航动作的。
风机的传感器是用来检测风速、风向、风机振动、环境温度、风机的扭缆状态、风轮的锁定状态等。
机舱柜和塔筒柜的功能描述见操作说明书2.风机发电控制方法在低风速,转子的速度在定义的范围内是受控制的,这是通过改变发电机的力矩命令,这样的控制能够使风机最大化的捕获风能。
东风DF-J33型风机车电子控制装置说明书

励磁电流从 0 上升到稳态的时间为 2~5s。
4 工作原理:
4.1 概述
4.1.1 恒功率控制:柴油机转速传感器产生的柴油机转速信号,经
F/V 变换、放大后,产生控制信号 En 值,函数发生器产生的 Pref 功
标记 处数 更改文件号 签字 日期 标记 处数 更改文件号 签字 日期
编号
J33 00 000SM
设计文件
北京东风机车电器厂
DF-J33 型机车
电子控制装置使用说明书
编号 代替 页码
J33 00 000SM 共7页 第1页
1 概述 DF-J33 型机车电子控制装置用于东风 7 系列电传动内燃机车的电
气控制系统。通过 PIU 传感器、柴油机转速传感器输入信号,可以实 现牵引控制(恒功率、低恒速、防空转)、柴油机无级调速控制、故 障励磁等功能。 2 结构特点 2.1 电子控制装置控制箱采用双层结构,内层为国际标准机箱:3U ×84TE ;外层尺寸:168×460×281。 2.2 控制箱由 14 块插件组成,其结构及各插件布置见图 1。
编制 校核
标准化 主管
审核
批准
标记 处数 更改文件号 签字 年月日 (职务) (签名) (年月日) (职务) (签名) (年月日)
编号
J33 00 000SM
共7页第2页
3.1.1 工作电源:输入 DC77~132V;
输出±12V;
3.1.2 传感器
牵引电流传感器 输入:0~75mV(0-1000A);
不合适; c) 功率给定电路给定值偏移; d) 有不正常的空转信号 Pk 值 e) 扣功开关位置不对
a) 调整 PIU 传感器上相应电位 器;
b) 调整间距; c) 修理或更换调节插件 d) 检修三块测流插件和空转
东汽FD70,FD77风机变频器系统原理和应用
东汽FD70/FD77风机变频器系统原理和应用东汽风电事业部高级工程师-杨雄杰摘要:本文详细分析了1.5MW风力发电机变速恒频发电系统的工作原理,对东汽FD70/FD77风机变频器系统的主要电路特性给出重点分析,变频器运行中的典型故障给出处理案例。
对风机变频器系统的实际应用具有指导意义。
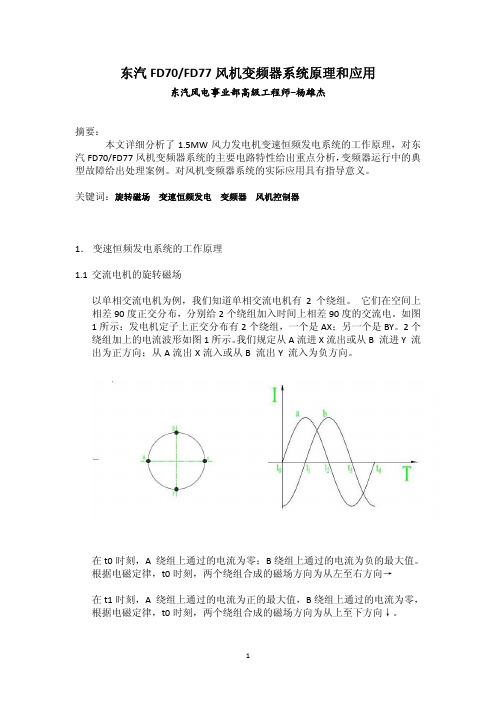
关键词:旋转磁场 变速恒频发电 变频器 风机控制器1.变速恒频发电系统的工作原理1.1交流电机的旋转磁场以单相交流电机为例,我们知道单相交流电机有2个绕组。
它们在空间上相差90度正交分布,分别给2个绕组加入时间上相差90度的交流电。
如图1所示:发电机定子上正交分布有2个绕组,一个是AX;另一个是BY。
2个绕组加上的电流波形如图1所示。
我们规定从A流进X流出或从B 流进Y 流出为正方向;从A流出X流入或从B 流出Y 流入为负方向。
在t0时刻,A 绕组上通过的电流为零;B绕组上通过的电流为负的最大值。
根据电磁定律,t0时刻,两个绕组合成的磁场方向为从左至右方向→在t1时刻,A 绕组上通过的电流为正的最大值,B绕组上通过的电流为零,根据电磁定律,t0时刻,两个绕组合成的磁场方向为从上至下方向↓。
在t2时刻,A 绕组上通过的电流为零,B绕组上通过的电流为正的最大值,根据电磁定律,t2时刻,两个绕组合成的磁场方向为从右至左方向←。
在t3时刻,A 绕组上通过的电流为负的最大值,B绕组上通过的电流为零,根据电磁定律,t3时刻,两个绕组合成的磁场方向为从下至上方向↑。
在t4时刻,正好回到t0时刻的状态,两个绕组合成的磁场方向为从左至右方向→ 。
电流变化一个周期,两个绕组合成的磁场旋转一周。
旋转磁场的转速n = 60 f / p 。
同理,如果三相绕组在空间上按120度对称分布,三相绕组在时间上分别加上相位相差120度的三相交流电。
同样要在转子铁芯周围形成一个旋转磁场。
旋转磁场的转速n = 60 f / p 。
f : 三相交流电频率。
东汽风力发电机主控系统 起动

2.1.5自检
风机启动后,先依据上一次最高级别的刹车状态(LastBP),进行相应的系统 自检。如果上一次是高级别的刹车状态导致停机,则需要进行自检,以检查 风机是否处于正常状态。 l 刹车测试1: 1) 机械刹车2激活(DiscBrake2=0),延时10s,监测高速轴转速。 2) 机械刹车1激活(DiscBrake1=0),叶片以0.5 度/s 的速度变桨到90度。 3) 延时5s,监测高速轴转速(HighShaftRPM)是否为0rpm,如果是, 进入下一测试阶段,否则,状态报警:刹车打滑。 l 刹车测试2: 1) 叶片以2度/秒变桨到启动桨角70度(StartAngle)。
2.1.3待机
风机从停机状态进入待机状态必须满足以下条件: 1) 检查当前的刹车状态,在正常范围内,即ActiveBP=0。 2) 盘刹1、盘刹2 处于打开状态,即iBrake1Open=1 且iBrake2Open =1。 3) 主控给出旁路极限开关指令,三支桨叶以0.5 度/秒减小到90 度。极限开 关被脱开后,进入待机状态。
2.1.6增速
进入增速状态后,桨角以启动变桨速率2度/秒,由70度往0度方向靠近。 当实际转速(ActualRPM)大于最小启动转速300rpm (pRn_MinStartRPM) 时,由GH算法控制方式启动,并快速通过塔筒的共振范围。如果风速减 小或通过共振区超时将中断启动程序,叶片回到启动桨角(StartAngle)进 入待机状态。 增速过程分为阶段1 增速1100rpm(pRn_RPMRamp1End)和阶段2增速 目标1200rpm(pRn_RPMRamp2End)两个过程。 1) 转速在0rpm-1100rpm阶段,主控控制变桨距系统以40rpm/s的增 速使转子转速迅速提升至1100rpm附近。另外,在此期间,转子转速会 迅速的通过共振区,如果说转子转速在共振转速的时间超时,那么主控 会要求风机停机,长时间运行在共振区可能导致风机受损 2) 转速在1100rpm-1200rpm阶段,主控控制变桨距系统以10rpm/s 的增速使转子转速缓慢的靠近1200rpm附近
东汽风机控制系统
第一章风机控制系统概述风机所有的监视和控制功能都通过控制系统来实现,它们通过各种连接到控制模块的传感器来监视、控制和保护。
控制系统给出叶片变桨角度和发电机系统转矩值,因而作用给电气系统的分散控制单元的上位机和旋转轮毂的叶片变桨调节系统。
采用最优化的能量场算法,使风机不遭受没必要的动态压力。
它包括电网电压、频率、相位、转轴转速、齿轮箱、发电机、现场的各种温度、摆动、振动、油压、刹车衬套的磨损、电缆的弯曲和气象数据的监视。
危机故障的冗余检查,以及在紧急1对风,2(6)电缆扭曲到一定值后,能自动解缆。
(7)当机组运行过程中,能对电网、风况和机组的运行状况进行检测和记录,对出现的异常情况能够自行判断并采取相应的保护措施,并能够根据记录的数据,生成各种图表,以反映风力发电机组的各项性能。
(8)对在风电场中运行的风力发电机组还应具备远程通信的功能。
风机控制系统图第二章控制系统及安全规范1主控系统主控系统位于塔顶的机舱主控制柜内,控制模块通过光纤数据传输电缆和RS485串口分别与塔基变频器开关柜上的显示操作屏和变桨控制系统相连。
主控柜中包含有高度集成的控制模块WP3100、超速模块、转速模块、各种空气开关、电机启动保护开关、继电器、接触器等。
图2.1主控柜主控系统连续不断的发出转矩给定值到变频器控制系统,发出叶片角度给定值到变桨控制系统,变桨控制系统的同步控制器驱动轮毂中的变浆控制电机来进行各种调节和控制。
23率外,还作为三重冗余保护。
每个叶片多安装有一个角度编码器,每个电机也装有一个编码器,在运行中,L+B控制还监视变桨电机的电流和温度,三个蓄电池循环充电控制,蓄电池电压检测,并通过串口与控制器WP3100通讯进行数据传输。
4安全刹车风机装有两个刹车卡钳,通过作用在装在高速轴上的刹车盘来止动。
刹车卡钳直接安装在齿轮箱壳体上。
止动时靠弹簧力,张开时靠液压力。
为了防止驱动装置过度拉紧,液压回路上的刹车卡钳可以通过不同压力等级产生刹车转矩。
东汽机组主控系统介绍(DEIF)

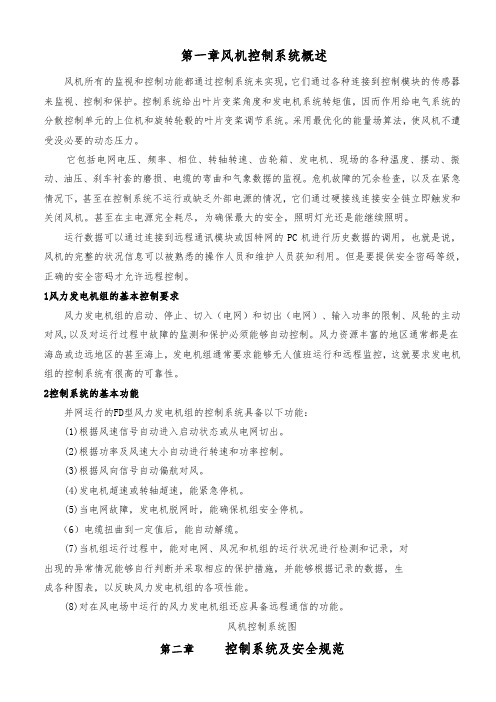
状态码
状态码包括:
级别 状态码 名称 延时 报警程序 刹车程序 偏航程序 复位方式 复位延时
状态码
级别:是指相应状态码所属的等级,DEIF控制系统 共定义了21个等级,依次从等级0至等级20。 状态码名称:是指风机状态码的文字说明,每个状 态码对于一个中文说明。用户可以根据状态码的名称来 识别状态码的信息。 延时:是指激活相应状态码时所设置的延时时间。 报警程序:是指风机控制系统的处理策略,它包括 停机和报警两种处理策略:停机控制风机执行停机程序 ;报警只执行报警而不执行停机程序,所以风机可以继 续运行。 偏航程序:偏航程序是指风机控制系统所所采用的 偏航策略。
Y
存在停机故障码? ßrefer由桨角闭环控制输 出 的桨角 目标参考值 Trefer由转矩闭环控制输 的转矩目标参考值
N
风机运行/固定桨角
执行相应刹车程序
风机桨角设定值ßset =ßrefer 发电机转矩设定值Tset = Trefer
Y
高速轴转速< 1010rpm?
变流器欠速转 速 = 990/ 1000rpm
风力不足
高速轴转速 > 1200rpm?
N
转速 < 950rpm 且 持续时间 > 15s
手动设置是否允许并网
Y
风机减速到塔筒 共振区下
发电机运行设置 = 发电机运行 [02.024]
N
Y
齿轮油入口温度 > *-1°[11.014]?
N
Y
变流器加热未激活?
N
Y
10min平均风速> *3.0m/s[02.005] & 20s平均风速> *3.5m/s[02.006]
状态码
DEIF 风能介绍--AWC500和PPM

Page 22/20
THANKS
Page 23/20
Page 16/20
DEIF低电压穿越 – 在禾望的测试报告
Page 17/20
DEIF风能产品质量保证和信誉
所有产品的设计寿命按20年
Deif实验室可以完成所有和 产品相关的测试,并经过检验 机构的认证,具有第三方检验 资格,所处出具的报告可以直 接得到包括GL,UL等在内多家 机构的认可。 – 测试项目包括: – 温度、湿度测试 – 震动和冲击测试 – 电磁兼容性测试 – 安全性测试 – HALT 测试
Indian: Pioneer (250kW) stall turbine Pioneer (750kW) stall turbine Shriram (250kW) stall turbine RRB Energy (India) 600kW pitch turbine (Vestas V47) with main controller and pitch control (hydraulic pitch) 850KW – main controller and pitch control RRB Energy (India) 1800kW pitch turbine with main controller and pitch controller. Garuda (India) 750kW pitch turbine with main controller and pitch controller. Garuda (India) 1800kW pitch turbine with main controller and pitch controller
China: DFST, DFEM, United Power, Hewind, Huide, Sewind 国内已超过1000台风机主控系统和超过20个风场运行,包括多个大型特许权 项目,如甘肃昌马,甘肃干河口等。
风力发电机组控制系统及SCADA系统参考文档

环境温度:存储温度-400C-700C(低温型)运行温度:0-600C;相对湿度:5-95% 适合于振动环境
► 高性能的CPU,大容量的存储器
intel 80386EX,33MHZ,8M内存,最大64M程序存储区,适合于复杂的算法,兼具传统DCS和PLC的优点
► 灵活的通讯方式,简洁的网络结构
轮毂控制柜
► 安装于柜体中,分3个部分,每个部分负责一个叶片 ► 轮毂PLC站
CAN SLAVE模块 轮毂转速编码器模块 叶片角度编码器模块 I/O模块(DIO,AIO)
► 伺服驱动单元 ► 紧急变桨蓄电池及监视单元 ► 紧急变桨模块 ► 超速保护继电器 ► 小型断路器,各种继电器及端子板 ► 各种按钮,指示灯及维护开关
存储器,4MB内部闪存用于系统软件
DIO数字量输ห้องสมุดไป่ตู้输出模块
► 可配置输入/输出比 ► 可从数字传感器读取信号 ► 数字执行机构切换 ► 提供输入与输出I/O电位间的插针
,并与总线电隔离 ► 防止输出短路,过载热保护 ► 数字输入/输出模块DIO2XX可用于
驱动执行机构、如接触器、继电器 ,气动阀和液压阀,还可用于读取 数字工作设备的信号,如传感器, 光电管设备和各种开关。
自动运行控制要求
►7、对风控制 风机在工作风速区时,应根据机舱的控制灵
敏度,确定每次偏航的调整角度。由风向标 判定机舱与风向的偏离角度,根据偏离的程 度和风向传感器的灵敏度,时刻调整机舱偏 航电机的运行状态。
自动运行控制要求
►8、功率调节 当风机在额定风速以上并网运行时,一旦发
生过载,必须进行变距调节,减小风轮的捕风 能力,以便达到调节功率的目的,通常桨距 角的调节范围在0°—90°
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章风机控制系统概述
风机所有的监视和控制功能都经过控制系统来实现, 它们经过各种连接到控制模块的传感器来监视、控制和保护。
控制系统给出叶片变桨角度和发电机系统转矩值, 因而作用给电气系统的分散控制单元的上位机和旋转轮毂的叶片变桨调节系统。
采用最优化的能量场算法, 使风机不遭受没必要的动态压力。
它包括电网电压、频率、相位、转轴转速、齿轮箱、发电机、现场的各种温度、摆动、振动、油压、刹车衬套的磨损、电缆的弯曲和气象数据的监视。
危机故障的冗余检查, 以及在紧急情况下, 甚至在控制系统不运行或缺乏外部电源的情况, 它们经过硬接线连接安全链立即触发和关闭风机。
甚至在主电源完全耗尽, 为确保最大的安全, 照明灯光还是能继续照明。
运行数据能够经过连接到远程通讯模块或因特网的PC机进行历史数据的调用, 也就是说, 风机的完整的状况信息能够被熟悉的操作人员和维护人员获知利用。
可是要提供安全密码等级, 正确的安全密码才允许远程控制。
1 风力发电机组的基本控制要求
风力发电机组的启动、停止、切入( 电网) 和切出( 电网) 、输入功率的限制、风轮的主动对风,以及对运行过程中故障的监测和保护必须能够自动控制。
风力资源丰富的地区一般都是在海岛或边远地区的甚至海上, 发电机组一般要求能够无人值班运行和远程监控, 这就要求发电机组的控制系统有很高的可靠性。
2 控制系统的基本功能
并网运行的FD型风力发电机组的控制系统具备以下功能:
(1)根据风速信号自动进入启动状态或从电网切出。
(2)根据功率及风速大小自动进行转速和功率控制。
(3)根据风向信号自动偏航对风。
(4)发电机超速或转轴超速, 能紧急停机。
(5)当电网故障, 发电机脱网时, 能确保机组安全停机。
( 6) 电缆扭曲到一定值后, 能自动解缆。
(7)当机组运行过程中, 能对电网、风况和机组的运行状况进行检测和记录, 对出现的异常情况能够自行判断并采取相应的保护措施, 并能够根据记录的数据, 生成各种图表, 以反映风力发电机组的各项性能。
(8)对在风电场中运行的风力发电机组还应具备远程通信的功能。
风机控制系统图
第二章控制系统及安全规范
1 主控系统
主控系统位于塔顶的机舱主控制柜内, 控制模块经过光纤数据传输电缆和RS485串口分别与塔基变频器开关柜上的显示操作屏和变桨控制系统相连。
主控柜中包含有高度集成的控制模块WP3100、超速模块、转速模块、各种空气开关、电机启动保护开关、继电器、接触器等。
图2.1 主控柜
主控系统连续不断的发出转矩给定值到变频器控制系统, 发出叶片角度给定值到变桨控制系统, 变桨控制系统的同步控制器驱动轮毂中的变浆控制电机来进行各种调节和控制。
每个系统都带有自己的监视功能, 变频器能独立工作且能自行停止, 它也给定模拟信
号到主控系统, 主控系统在给定相应的信号到变桨系统, 然后驱动叶片变化角度。
在变浆控制系统中, 系统自身监视只对故障起作用, 象下列故障: 叶片和叶片角度偏差等。
它能够经过通讯电缆请求主控系统快速停机。
2 安全链
安全链是一个硬回路, 由所有能触发紧急停机的触点串联而成, 任何一个触发都会导致紧急停机。
以下是构成紧急停机的信号点:
位于机舱控制柜上的紧急停机按钮, 机舱内便携式控制盒停机按钮, 变频器控制柜上的紧急停机按钮。
低速轴超速信号, 发电机转速超速信号。
超过额定功率的1.5倍。
振动超限
主控系统触发的变浆控制失败
电缆扭曲: ±4旋转
3 变浆控制
三个叶片变桨分别由三个带变频控制的三个直流电机驱动, 经过L+B控制器同步调整动作。
如果是电网故障或安全停机, 每个电机的电源由各自的后备蓄电池提供。
变桨控制除了调节功率外, 还作为三重冗余保护。
每个叶片多安装有一个角度编码器, 每个电机也装有一个编码器, 在运行中, L+B控制还监视变桨电机的电流和温度, 三个蓄电池循环充电控制, 蓄电池电压检测, 并经过串口与控制器WP3100通讯进行数据传输。
4 安全刹车
风机装有两个刹车卡钳, 经过作用在装在高速轴上的刹车盘来止动。
刹车卡钳直接安装在齿轮箱壳体上。
止动时靠弹簧力, 张开时靠液压力。
为了防止驱动装置过度拉紧, 液压回路上的刹车卡钳能够经过不同压力等级产生刹车转矩。
为了刹车时转轴能停下来, 刹车转矩等于100%额定转轴转矩( 刹车力矩等级1) 。
大约6.5s后刹车制动程序开始执行, 刹车转矩增加到等级2, 此时刹车器持续施加等于2倍额定转轴转矩的压力。
刹车器张开的最大要求压力: 120bar
运行压力: 140~160bar
最大压力: ( 极限值) 200bar
第三章传感器
1 转速传感器
风力发电机组转速的测量点有三个: 即发电机输入端转速、齿轮箱输出端转速和风轮转速, 发电机输入端转速一个, 齿轮箱输出端转速一个, 风轮转速两个, 还有两个转速传感器安装在机舱与塔筒连接的齿轮上, 用来识别偏航旋转方向。
图3.1 转速传感器。