LMS算法自适应均衡实验
BPSK调制传输系统LMS算法自适应均衡性能分析

BPSK调制传输系统LMS算法自适应均衡性能分析BPSK调制传输系统中,LMS(Least Mean Square)算法是一种常用的自适应均衡算法。
它通过自适应地调整均衡器的权重系数来实现信道均衡,从而提高系统的性能。
本文将对LMS算法在BPSK调制传输系统中的性能进行分析。
首先,我们需要了解BPSK调制传输系统的基本原理。
BPSK调制是一种二进制调制方式,它将数字信号转换为两个不同的相位信号,分别代表1和0。
在传输过程中,信号会经过信道引起失真和噪声干扰。
为了恢复原始信号,我们需要对接收到的信号进行均衡处理。
LMS算法的核心思想是根据误差信号来调整均衡器的权重系数。
误差信号是接收信号经过均衡器处理后与已知原始信号之间的差异。
通过不断调整权重系数,LMS算法能够逐步减小误差信号,最终实现信道均衡。
在BPSK调制传输系统中,我们可以对LMS算法的性能进行以下几个方面的分析。
1.收敛速度:LMS算法的收敛速度是衡量其性能的重要指标之一、收敛速度越快,均衡器能够更快地适应信道的变化,提高系统的实时性和鲁棒性。
收敛速度受到多种因素的影响,例如步长参数的选择、信道的时变性等。
在实际应用中,需要根据具体情况进行优化。
2.系统误码率:误码率是衡量系统性能的重要指标。
对于BPSK调制传输系统,误码率反映了接收信号正确解码的概率。
通过调整LMS算法的参数,如步长参数和滤波器长度等,可以改善系统的误码率性能。
同时,深度学习等新兴技术也可以结合LMS算法进行优化,进一步降低误码率。
3.资源利用率:BPSK调制传输系统中,LMS算法会引入一定的计算复杂度和存储开销。
因此,需要考虑LMS算法的资源利用率。
通过算法设计和硬件优化,可以减少计算量和存储需求,提高资源利用率。
4.系统可靠性:LMS算法在均衡过程中,由于噪声和失真等因素的存在,可能导致误差信号不断波动,进而影响系统的可靠性。
可以通过优化算法参数、加入先验知识或调整均衡器结构等方法来提高系统的可靠性。
基于LMS算法的光纤信道自适应均衡器的研究

Z 1 .4 0 00
( 第 1 8期 ) 总 5
Hale Waihona Puke (u S m. NO 1 8 . 5 )
光 通 信 系 统 与 网 络 技 术
基于 L MS算 法 的光 纤信 道 自适 应 均衡 器 的研 究
王敬 辉 , 剑 飞 , 蒙 军 , 刘 王 曾祥 烨
( 河北 工 业 大 学 信 息工 程 学 院 , 津 3 0 0 ) 天 0 4 1
sm pl n fiinta d c fe tvey e i n t hei t rs m b Iit r e e c a e y fb r ds r in a lrz i n M o i e a d e fce n an e fc i l lmi a e t n e — y o n e fr n e c us d b ie ipe so nd Poa iato de Dipe so ( s r in PM D ),a r p it orfb rop i o m u c to s s e st tr qur gh e a ia i pe d. pp o ra e f i e tc c m nia in y t m ha e iehi qu lz ton s e
摘要 : 文章 分 析 了影响 光 纤 通信 系统 性 能 的 主要 因素 , 绍 了在 理 论 分析 的 基 础 上 建 立 的 单 模 光 纤 信 道 仿 真 模 型 ; 介 绍 了 介 还 判 决 反馈 均衡 器( F ) 基本 结构 和 最 小均 方( MS 误 差 算 法 , 用 MA AB软 件 仿 真 了采 用 L D E的 L ) 并 TL Ms算 法对 1 i s 纤 0Gbt 光 / 信 道 进 行 自适 应 均 衡 的性 能 。仿 真 结 果表 明 , MS算 法 简单 、 效 , 有效 消 除 光 纤 色散 和偏 振模 色散 ( MD 引起 的 码 间 干 L 高 能 P ) 扰, 比较 适合 对均 衡 速 度要 求较 高的 光 纤通 信 系统 。 关 键 词 : 纤 ;自适应 均 衡 ; 光 色散 补 偿 ; 小 均 方误 差 最 中图 分类 号 : 9 1 5 TN 1 . 文献 标 识 码 : A 文 章 编 号 :0 58 8 ( O 】 2。 1 — 3 1 0 — 7 8 2 1 O 一 0 OO O
自适应均衡算法LMS研究
自适应均衡算法LMS研究一、自适应滤波原理与应用所谓自适应滤波器,就是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。
根据环境的改变,使用自适应算法来改变滤波器的参数和结构。
1.1均衡器的发展及概况均衡是减少码间串扰的有效措施。
均衡器的发展有史已久,二十世纪60年代前,电话信道均衡器的出现克服了数据传输过程中的码间串扰带来的失真影响。
但是均衡器要么是固定的,要么其参数的调整是手工进行。
1965年,Lucky在均衡问题上提出了迫零准则,自动调整横向滤波器的权系数。
1969年,Gerhso和Porkasi,Milier分别独立的提出采用均方误差准则(MSE)。
1972年,ungeboekc将LMS算法应用于自适应均衡。
1974年,Gedard 在kalmna滤波理论上推导出递推最小均方算法RLS(Recursive least-squares)。
LMS类算法和RLS类算法是自适应滤波算法的两个大类。
自适应滤波在信道均衡、回波抵消、谱线增强、噪声抑制、天线自适应旁瓣抑制、雷达杂波抵消、相参检测、谱估计、窄带干扰抑制、系统辨识、系统建模、语音信号处理、生物医学、电子学等方面获得广泛的应用。
1.2均衡器种类均衡技术可分为两类:线性均衡和非线性均衡。
这两类的差别主要在于自适应均衡器的输出被用于反馈控制的方法。
如果判决输出没有被用于均衡器的反馈逻辑中,那么均衡器是线性的;如果判决输出被用于反馈逻辑中并帮助改变了均衡器的后续输出,那么均衡器是非线性的。
图1.1 均衡器的分类1.3自适应算法LMS 算法LMS 算法是由widrow 和Hoff 于1960年提出来的,是统计梯度算法类的很重 要的成员之一。
它具有运算量小,简单,易于实现等优点。
LMS 算法是建立在Wiener 滤波的基础上发展而来的。
Wiener 解是在最小均方误差(MMSE)意义下使用均方误差作为代价函数而得到的在最小误差准则下的最优解。
基于LMS及RLS的自适应均衡算法仿真分析
2 0 年第2 08 期
中图分类号 :N 1 T 91 文献标识码 : A 文章编号 :09 52 2o )2— 14—0 10 —25 (080 02 3
基于 L MS及 R S的 自适 应 均 衡算 法仿真 分 析 L
王 玲 ,韩 红玲
Ab ta t T ee u l ain i h e ev r s te e e t e meh d t e u e itry o ne ee c P icpe sr c : h q ai t n t e rc ies i f c v to o rd c nesmb litr rn e. rn il z o h i f o e t - o i e a iain s p o o e Ad p ie e u lz t n ag r h s bae o L a RL r ft i d man qu z t i rp s d. a t q aia i o i m s d n MS nd h me l o v o l t S ae p e e td,u t emo e h p roma c s o h g rtms a o a e fo s v r fco , s c a te rs n e f rh r r te e r n e f te a o h r c mp r d rm e e a a tm f l i e l uh s h c n eg n e te s mb leT rrt d t e c n tl to o v re c , h y o IO ae a o sel in. n h a K e r s: a a t e e aiain; itry o n e ee c y wo d d pi q l z t v u o n es mb litr rn e; LMS ag rtm ; RL lo tm f o h l i S ag r h i
自适应均衡(包括LSM和RLS算法)

自适应均衡实验1、实验内容和目的1)通过对RLS 算法的仿真,验证算法的性能,更加深刻的理解算法的理论。
2)分别用RLS 算法和LSM 算法实现图1中的自适应均衡器,比较两种算法的差异,分析比较算法的性能,从而掌握两种算法的应用。
图1 自适应均衡框图2、基本原理分析1)LMS 算法原理LMS 算法一般来说包括两个基本过程:滤波过程和自适应过程。
滤波过程来计算线性滤波器的输出及输出结果与期望响应的误差。
自适应则是利用误差来自动调节滤波器的参数。
LMS 算法也是一个递推的算法。
设()J n 是滤波器在n 时刻产生的均方误差,其梯度计算如下:()()22n n ∇=-+J p Rw其中R 和p 分别是输入的自相关矩阵和输入与期望输出的互相关矩阵:()()()ˆH n n n =Ru u()()()*ˆn n n =pu d 则梯度向量的瞬态估计为:()()()()()()*ˆˆ22H n n n n n n ∇=-+J u d u u w 由最速下降算法可以得到抽头向量更新的递推关系式:()()()()()()*ˆˆˆ1Hn n n n n n μ⎡⎤+=+-⎣⎦w w u d u w整个LMS 算法归纳总结如下: 参数设置:M=抽头数(滤波器长度) μ=步长参数 m a x20MS μ<<其中max S 是抽头输入功率谱密度的最大值,而滤波器长度M 为中到大 初始化:如果知道抽头权向量()n w 的先验知识,则用它来选择()ˆ0w 的合适值,否则令()ˆ00=w。
更新滤波过程:()()()ˆH y n n n =wu ()()()e n d n y n =- ()()()()*ˆˆ1n n n e n μ+=+ww u 2)RLS 算法原理RLS 算法是一个递归的过程,递归最小二乘问题的正则方程可用矩阵写为()()()ˆn n n =Φwz 其中n 是可测数据的可变长度,()n Φ更新抽头输入的自相关矩阵,()n z 是抽头输入与期望响应之间的互相关向量,()ˆn w 是抽头的权值向量。
一种改进的变步长的LMS自适应滤波算法及其仿真
误 差信 号 ,u 是算法 步长 因子 。该 算法 的收 敛速度 和 步长 因子 是成正 比关 系 ,
本文 提 出的变 步长 自适应 算法 主 要是在 前 人研 究 的基础 上 ,通过 调整 步
长 因子 的表 达式 ,改善 滤波 性 能 ,并在 收 敛速 度 与收 敛精 度之 间 取得较 好 的
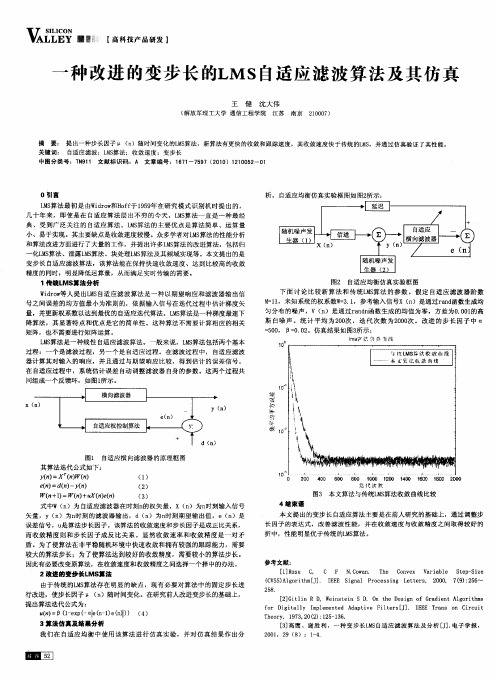
1传统 L 算法 分析 MS W do 等 人提 出LS irw M 自适应 滤 波 算法 是 一种 以期 望 响应 和滤 波 器 输 出信 号之 间误 差 的均 方值 最 小为 准则 的,依 据 输入 信 号在迭 代 过程 中估计 梯度 矢 量, 弗更新 权系 数 以达到 最优 的 自适应迭 代 算法 。L S M 算法 是一种 梯度 最速 下
逃 1 淡 数
图3 本 文算法 与传 统L S 法 收敛 曲线 比较 M算
4结束 语
式 中W ( )为 自适 应滤 波器 在 时刻n n 的权 矢量 ,X ( )为n 刻输 入信 号 n 时 矢 量 ,Y ( )为n n 时刻 的滤 波器 输 出 ,d( )为n 刻期 望 输 出值 ,e ( )是 n 时 1 1
LMS算法自适应均衡器实验

LMS 算法自适应均衡器实验08S005073 房永奎一、实验目的1、掌握LMS 算法的计算过程,加深对LMS 算法的理解。
2、研究用LMS 算法自适应均衡引起失真的线性色散信道问题。
3、研究特征值扩散度()R χ和步长参数μ对学习曲线的影响。
二、实验原理1、自适应均衡器)n图1 自适应信道均衡试验原理图自适应均衡器用来纠正存在加性白噪声的信道的畸变,信道均衡器的原理框图如1所示。
随机噪声发生器(1)产生用来探测信道的测试信号序列{n x },本实验中由Bernoulli 序列组成,n x =±1,随机变量n x 具有零均值和单位方差。
随机噪声发生器(2)产生干扰信道的白噪声()n ν,具有零均值,方差为2νσ=0.001。
信道的脉冲响应用升余弦表示为:20.51cos (2)1,2,30n n n h W π⎧⎡⎤⎛⎫+-=⎪ ⎪⎢⎥=⎝⎭⎨⎣⎦⎪⎩(1) 其中,参数W 控制均衡器抽头输入相关矩阵的特征值分布()R χ,并且特征值分布随着W 的增大而扩大。
均衡器具有11M =个抽头。
由于信道的脉冲响应n h 关于n =2时对称,那么均衡器的最优抽头权值on ω在5n =时对称。
因此,信道的输入n x 被延时了257∆=+=个样值,以便提供均衡器的期望响应。
通过选择匹配横向均衡器中点的合适延时∆,LMS 算法能够提供信道响应的最小相位分量和非最小相位分量之逆。
2、均衡器输入相关矩阵在时刻n ,均衡器第1个抽头的输入为()()()31k k u n h x n k v n ==-+∑ (2)其中所有参数均为实数。
因此,均衡器输入的11个抽头(),(1),,(10)u n u n u n --的自相关矩阵R 为一个对称的1111⨯矩阵。
此外,因为脉冲响应n h 仅在1,2,3n =时为非零,且噪声过程()v n 是零均值、方差为2v σ的白噪声,因此相关矩阵R 是主对角线的,有以下特殊结构所示:()()()()()()()()()()()()()()()012001012021010021000000r r r r r r r r r r r r r r r ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦R (3) 其中()22221230v r h h h σ=+++ (4)()12231r h h h h =+ (5)()132r h h = (6)其中方差20.001v σ=。
基于LMS算法的可见光通信自适应均衡技术

L MS ( 最小均方) 算 法 对 信 道 进 行 补 偿 。 实验 结 果 显 示 : 采用改进 的 L MS算 法 后 , 收 敛速度 更快 , 在 系统 趋 于 稳 定 时 , 误 码 率
明显 降低 。均 衡 器对 时 变信 道 跟踪 效 果 更 好 , 系统 稳 态误 差 相 对 减 小 。
无 线 通 信 技 术
基于 L MS算法 的可 见光通信 自适 应均衡技术
陈兰 霞 。 王 辉
( 南 京 工 业 大 学 计 算 机 科 学 与技 术 学 院 , 南京 2 l 1 8 1 6 ) 摘要 : 为 降 低 可 见 光 通 信 系统 的 误 码 率 , 提 高 系统 的 传 输 特 性 , 研 究 了 可 见 光 通 信 系 统 的 信 道 均 衡 技 术 。 建 立 了室 内 可 见 光 通 信 系 统 的信 道 模 型 , 阐述 了信 道 的 直射 冲 激 响 应 和 反 射 冲 激 响 应 。 针 对 多径 效 应 导 致 的 码 问 串扰 问 题 , 采 用一 种 改 进 的
2 0 1 6年
第 3期
光 通 信 研 究
S TUDY oN OPTI CAL COM M UN1 CATI ONS
2 O 1 6 . 0 6
总第 1 9 5期
( S u m. NO j . g t x y j . 2 0 1 6 . 0 3 . 0 2 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Harbin Institute of Technology
自适应信号处理实验
课程名称:自适应信号处理
设计题目:LMS算法自适应均衡器实验院系:电子与信息工程学院
专业:信息与通信工程
设计者:宋丽君
学号:11S005090
指导教师:邹斌
设计时间:2011.4.10
哈尔滨工业大学
一、实验目的
研究用LMS算法自适应均衡未知失真的线性色散信道。
通过本实验加深对LMS算法的理解,并分析特征值扩散度和步长参数对收敛迭代次数的影响。
二、实验原理
最小均方算法(LMS算法)是线性自适应滤波算法,包括滤波过程和自适应过程,这两个过程一起工作组成了反馈环。
图1给出了自适应横向滤波器的框图。
图1 自适应横向滤波器框图
LMS算法是随机梯度算法中的一员,LMS算法的显著特点是实现简单,同时通过对外部环境的自适应,它可以提供很高的性能。
由于LMS算法在计算抽头权值的迭代计算的过程中移走了期望因子,因此抽头权值的计算会受到梯度噪声的影响。
但是因为围绕抽头权值起作用的反馈环像低通滤波器,平均时间常数与步长参数μ成反比,所以通过设置较小的μ可以让自适应过程缓慢的进行,这样梯度噪声对抽头权值的影响在很大程度上可以滤除,从而减少失调的影响。
LMS算法在一次迭代中需要2M+1次复数乘法和2M次复数加法,计算的复杂度为O(M),M 为自适应滤波器中抽头权值的数目。
LMS算法广泛地应用于自适应控制、雷达、系统辨识及信号处理等领域。
主要应用有:处理时变地震数据的自适应反卷积,瞬态频率的测量,正弦干扰的自适应噪声消除,自适应谱线增强,自适应波束形成。
三、 实验内容
在实验中假设所使用的数据是实数,进行研究的系统框图如下图2所示。
随机数发生器1产生用来探测信道的测试信号n x ;随机数发生器2用来干扰。
信道输出的白噪声源()v n 。
这两个随机数发生器是彼此独立的。
自适应均衡器用来纠正存在加性白噪声的信道畸变。
经过适当延迟,随机数发生器1也提供用做训练序列的自适应均衡器的期望响应。
)
n
图2 自适应均衡实验框图
加到信道输入的随机序列{}n x 由伯努利序列组成,1n x =±,随机变量n x 具有零均值和单位方差。
信道的脉冲响应用升余弦表示为:
20.51cos (2)1,2,30n n n h W n π⎧⎡⎤⎛⎫+-=⎪ ⎪⎢⎥=⎝⎭⎨⎣
⎦⎪⎩
为其他
(1)
其中参数W 控制均衡器抽头输入的相关矩阵的特征值分布()R χ,并且特征值分布随着W 的增大而扩大。
随机数发生器2产生的序列n v 具有零均值,方差
20.001v σ=。
均衡器具有11M =个抽头。
由于信道的脉冲响应n h 关于2n =对称。
那么均衡器的最优抽头权值on w 在5n =对称。
因此,信道的输入n x 被延时了257∆=+=个样值,以便提供均衡器的期望响应。
通过选择匹配横向均衡器中点的合适延时
∆,LMS 算法能够提供信道响应的最小相位分量和非最小相位分量之逆。
实验分为相同的两个部分,用来估计基于LMS 算法的自适应均衡器的响应,
以便改变特征值扩散度()R χ与步长参数μ。
在描述这个结果之前,我们首先计算11个抽头均衡器相关矩阵R 的特征值。
在时刻n ,均衡器第1个抽头输入为:()()()3
k 1n n k u h x n k v ==-+∑
其中所有参数均为实数。
因此,均衡器输入的11个抽头
()()()n-1,,10u n u n -,u 相关矩阵R 是一个对称的1111⨯矩阵。
此外,因为其
脉冲响应n h 仅当n=1,2,3时是非零的,且噪声过程()v n 是零均值、方差为2v σ的白噪声,因此相关矩阵是R 是主对角线的,如以下特殊结构所示:
()()()
()()()()()()()()()()()()0120010120210100
2100
0000r r r r r r r r r r r R r r r r ⎡⎤
⎢
⎥⎢⎥⎢⎥=⎢
⎥⎢⎥⎢⎥⎢
⎥⎢⎥⎣⎦
其中 ()222
21230v r h h h σ
=+++ ()12231r h h h h =+ ()132r h h =
由信道脉冲响应可知道参数123,,h h h 由参数W 的值来确定。
下表1列出了自适应均衡实验参数小结:
表1:自适应均衡实验参数小结
具体的两部分实验内容如下:
1. 特征值扩散度的影响
步长参数固定为0.075μ=。
选择这个值的根据是:步长参数μ必须小于
max 1λ,其中max 1λ表示相关矩阵R 的最大特征值。
2. 步长参数的影响
固定参数W 的值为3.1,从而均衡器抽头输入相关矩阵的特征值扩散度为11.1238。
步长参分别取0.075、0.025、0.0075。
四、 程序框图
主程序流程框图 LMS 算法流程图
图3实验程序流程和LMS 算法流程图
五、实验结果
图4中四条线,由下至上分别对应参数W值:2.9,3.1,3.3,3.5
μ=,改变特征值扩散度] 图4 自适应均衡LMS算法学习曲线[0.075
k
W=2.9
024
681012
W=3.1
W=3.3k
W=3.5
图5 四个不同特征值扩散度的自适应均衡器的集平均脉冲响应
0500
10001500
10
-3
10
-2
10
-1
10
10
1
迭代次数
集平均平方误差
图6 改变步长时LMS 算法学习曲线
图6中,蓝线对应步长为0.0075,红线对应步长为0.025,绿线对应步长0.075。
六、 结果分析
图4中四条线,由上至下分别对应参数W 值:3.5,3.3,3.1,2.9。
对于每一个特征值扩散度,经过200次独立计算机实验,通过对瞬时误差()2e n 与n 的
关系曲线平均,可获得自适应滤波器的集平均学习曲线。
由图可以看出,特征值扩散度变化范围的扩大降低了自适应均衡器的收敛速率,同时也提高了平均平方误差的稳态值。
在图5中,对于四个感兴趣的特征值分布,我们画出了1000次迭代后自适应均衡器的集平均脉冲响应。
这个结果基于200次独立实验。
我们看到,在每种情况下自适应均衡器的脉冲响应关于中心抽头对称,这正是我们希望看到的。
从一个特征值扩散度到另一个特征值扩散度,其脉冲响应的变化仅仅反映信道脉冲响应相应变化的影响。
通过图6显示,证明了自适应均衡器收敛速率在很大程度上取决于步长参数。
当步长参数较大时(如0.075),均衡器收敛到稳态需120次迭代。
当步长较小时(如0.0075),收敛速率降低超过一个数量级。
该结果也表明平均均方误差稳态值随着步长参数值的变大而增大。