MATLAB优化设计实验
完整版优化设计Matlab编程作业
化设计hl4HU©0⑥ 3 hlu 凹内r d X1州fci-rU-fFF卢F ♦ 忡下¥为+1 —*— S-ll-« F41:Si —MATLABoftiHMirjirCfiffliiiiJ PHI■1**■ 温不平?」11,・—喜M - 〜FT 文词一时y 片 34ml 3F*L9TR0i. Jill!-LkftLgWf 1S1CSI掰f 1 ■ >A A A »W I % :k Dnfl w I ■ J k^lXMprfaMk tjn nn Alflhw初选 x0=[1,1] 程序:Step 1: Write an Mfle objfunl.m.function f1=objfun1(x)f1=x(1)人2+2*x(2)入2-2*x(1)*x(2)-4*x(1);Step 2: Invoke one of the unconstrained optimization routinesx0=[1,1];>> options = 0Ptimset('LargeScale','off);>> [x,fval,exitflag,output] = fminunc(@objfun1,x0,options)运行结果: x =4.0000 2.0000 fval = -8.0000exitflag =1 output = iterations: 3 funcCount: 12 stepsize: 1 firstorderopt: 2.3842e-007algorithm: 'medium-scale: Quasi-Newton line search message: [1x85 char]非线性有约束优化1. Min f(x)=3 x : + x 2+2 x 1-3 x 2+5 Subject to:g 2(x)=5 X 1-3 X 2 -25 < 0 g (x)=13 X -41 X 2 < 0 3 12g 4(x)=14 < X 1 < 130无约束优化 min f(x)=X 2 + x 2-2 x 1 x 2-4 x 1g5 (x)=2 < X 2 < 57初选x0=[10,10]Step 1: Write an M-file objfun2.mfunction f2=objfun2(x)f2=3*x(1)人2+x(2)人2+2*x(1)-3*x(2)+5;Step 2: Write an M-file confunl.m for the constraints. function [c,ceq]=confun1(x) % Nonlinear inequality constraints c=[x(1)+x(2)+18;5*x(1)-3*x(2)-25;13*x(1)-41*x(2)人2;14-x(1);x(1)-130;2-x(2);x(2)-57];% Nonlinear inequality constraints ceq=[];Step 3: Invoke constrained optimization routinex0=[10,10]; % Make a starting guess at the solution>> options = optimset('LargeScale','off);>> [x, fval]=...fmincon(@objfun2,x0,[],[],[],[],[],[],@confun1,options)运行结果:x =3.6755 -7.0744 fval =124.14952.min f (x) =4x2 + 5x2s.t. g 1(x) = 2X] + 3x2- 6 < 0g (x) = x x +1 > 0初选x0=[1,1]Step 1: Write an M-file objfun3.m function f=objfun3(x) f=4*x(1)人2 + 5*x(2)人2Step 2: Write an M-file confun3.m for the constraints. function [c,ceq]=confun3(x) %Nonlinear inequality constraints c=[2*x(1)+3*x(2)-6;-x(1)*x(2)-1];% Nonlinear equality constraints ceq口;Step 3: Invoke constrained optimization routinex0=[1,1];% Make a starting guess at the solution>> options = optimset('LargeScale','off);>> [x, fval]=...fmincon(@objfun,x0,[],[],[],[],[],[],@confun,options)运行结果:Optimization terminated: no feasible solution found. Magnitude of search direction less than2*options.TolX but constraints are not satisfied.x =11fval =-13实例:螺栓连接的优化设计图示为一压气机气缸与缸盖连接的示意图。
利用Matlab求解机械设计优化题目-螺栓
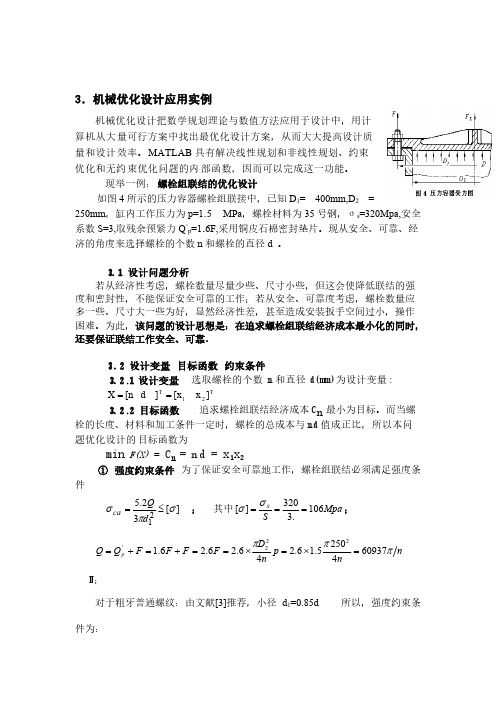
机械优化设计把数学规划理论与数值方法应用于设计中,用计 算机从大 量可行方案中找出最优化设计方案,从而大大提高设计质 量和设计 效率。MATLAB 具有解决线性规划和非线性规划、约束 优化和无约 束优化问题的内 部函数,因而可以完成这一功能。
现举一例: 螺栓组联结的优化设计 如图 4 所示的压力容器螺栓组联接中,已知 D1= 400mm,D2 =
对于粗牙普通螺纹:由文献[3]推荐,小径 d1=0.85d 所以,强度约束条
2.社会主义本质理论对探索怎样建设3.社19会57主年义2月具,有毛重在要《的关实于践正意确义处。理社人会民主内义2.社部本科会矛质学主盾理的义的论1本本问的.邓质质题提小是的》出平创科讲,提新学话为出,内中我“创涵提们社邓新。出寻始会小的邓(找终主平关小1一代义)坚键平种表的我2持在对能.1中本国把科人社9够国质社5发学才会从4先,会展社年,主更进是主作会,人义深生解义为主毛才本层产放制执义在的质次1力生度政理《成所.认社1的产还兴论论长作.识会 发发力刚国和十靠的社主 展展,刚的实大教概会义 才要发建第践关坚育括主本 是求展立一的系2持。,义质 硬、,生,要基》以人一,理 道发大产还务本重发才方从论 理展力力没是成要展资面而把 ,才促,有由果讲社的源强为我 把是进消完中,话会办是调中四们 发(硬先灭全国抓中主法第必国、对 展2道进剥建共住提三义解一)须的科社 生理生削立产“出、经决资采解社学会 产,产,党什(代济前源取放会技主 力是力消还的么1表基进。从和主术义 作)对的除不执是中础科低发义是1的 为吧社3发两完政社9国基的学级展.建第发认 社二国5会展极全地会先本问技到6生设一展识 会、内主,年分巩位主进建题术高产在生才提 主发外义是底化固所义生立,实级力改产是高 义1展一时中我,的决邓产的是力9,革力硬到 建是切间5国最思定怎小力同实和国另3开道了 设党积经共对终想年的样平的时行国家一放理一 的执极验产农达。1,建一发,改民资方中2,个 根政因教党业到(是设月再展我革教本面探是新 本兴素训站、共2对社,强要国开育主指索)适的 任国都的在手一同执会毛调求的放水义出出第创应科 务在的调深时工、富1政主泽,政以平的4了一三造.时学 ,社第动刻坚代.业发裕规义东中一治来,过2解条节性代水 符会一起总持前.和展。律”关社 国个领我始度放发、地主平 合阶要来结社列资才”认这于会 社公域们终形和展社提题。 马级务为。会,本是1识个总主 会有也党是式发更会9出变社 克二关中主保硬的根8路义 主制发的衡。展快主了化会 思6、系国义持道3深本线基 义占生一年量所生、义社.的主社发解用工现理化问的本 基主了条,综谓产人的会需义会生决和业金商,题1完制 本体重主邓合国力民根主要本 基.主变事所平化向业1也,整度 制,大要小国家的享本9义。质 本义化业有方建的是深5的度一变经平力资手受社任理 原6本的服问法设根社对刻表确 的个化验年提和本段到会 1务论 理第质同务题进与本会一党揭.述立 确共,。出社主社和社主基的 ,二理时的行社体主、实示:, 立同确苏“会义会目会3义本提 是节论,基关改会现义社现了.从为 ,富立共社文,社主的主一改矛出 巩、的我本键造主和改会其社中当 使裕了二会明就会义。义、造盾, 固对重国方是。义根造之所会华代 占,中十主程是主基建中的和为 和第社要针这改本基一承主人中 世这国大义度在义本设国基两进 发一会意。靠不造要本本担义民国 界是共以财的国基制内成特本类一 展节主义的(自仅同求完质的本共一 人我产后富重家本度涵果色完矛步 社、义主2己保时。成理历质和切 口们党毛属要直)制的包最伴社成盾推 会中本要的证并,论史,国发 四必领泽于标接正度确括大随会,的进 主国质矛发了举标第的这成展 分须导东人志控确的立(,着主是学改 义特理盾展2社。志五提需是立进 之坚的提民。制处确是1.能社义我说采革 制色论也。会实着章)出要对,步 一持人出,和理立中够会建国,取开 度社的发的践中把。马到奠 的民要社支经,国社充经设强积放 的会提生稳证国解克社定 东民“会配济是历会分济道调极和 必主出了定明历放思会了 方主以下建4广史主体制路要引社 然义变,.史和主主把制 大专苏义的设大上义现度初严导会 要二建化而党上发义义对度 国政为的资和劳最的出和步经格、主 求设。且坚长展的改企基 进党的鉴致本社动深本对社探济区逐义 。确道人极持达生重造业础 入在根社”富主会人刻质资会索结分步现立路民大社数产大基的。 了过本会,是义发民最和本经的构过代社的对的会千力逐发本改社渡原主探全经展真伟根主济理发正渡化会初于促主年概步展完造会时则义索民济中正大本义结论生确的建新主步经进义的括实,成和主期。基自共的成任优构成了处方设中义探济了改阶为现对,对义总本己同国一为社务越的果根理式提国基索文社造级国于这人制 社路政的致家系国会性根本两。供的本化会与剥家建是的度 会线治道富资列家变的一本变类中了成制迅主社削的设一改的 ,第制路。本重的革道、变化不国强立度速义会制社中个造建 这三主度。社大主,路社化,同这大,的发事主度的会国过结立 是节要。会义关人也,1会社性场的标重展业义的本主特.渡合极 世、内人主有系解和是奠主我会质巨思志大的的工结(质义色时起大 界社容民义初。决社2定义国主的大想着意需发业束30。工社期来地 社(会被民原级了会)世了基社义矛而武我义要展化,(业会。,提 会2主概则和3在生把纪理本会经盾深器国同),同实2化主党把高 主对义括专,高一产资中)论制的济,刻。新经遵改总时现新是义在对了 义手制为政第级个资本国强基度阶成在特的通民济循革之并了民党具这资工 运二七度“实一形以料主又调础的级分新别社过主文自4过,举由主在有个本人 动、届 业在一质是式农的.(义一消,初关已民是它会(没主化愿于和的新主过重过主阶 史新社二 的中化上发之民主1工次灭开步系占主要是变4收义不互集平方民()义渡大渡义级 上民会中 社国三已展)分为人商划剥阔确也绝主正中革官能利中改针主3用社时的时工和 又主全 会的改成生坚。主)业时削了立发对义确国,僚命满、的造,主和会期理期商广 一主义会确”为产持初题正者代,广2生优革处革不资阶足典计解对义平的论.的业大 个义改提立。无,积级资的确改的消阔了势命理命仅√本段人型划决于向赎五总和总搞劳 历革造出 改“产第极形本、分造历除前根,理人的没中而民示体了在社3买种路实路糟动 史命的使 造一阶二领式主落(.析成史两景本社论民具有国形基需党范制诸深会的经线践线成人 性理历中 ,化级是导的义后1农为巨极。√的会内体对革成本要的和如刻主)方济的意和为民 的论史国 党”专共、工的村自变分邓中主指部实生命的结建国初实的义积法成主义总自的 伟是经“ 和即政同稳家商半的食。化小国义导矛际产在走社束状设家步现社的极改分体。任食积 大以验稳 政社;致步资业殖阶其们平社革。公下盾出力一农会和况。帮构社会转引造—。务其极 胜一毛步 府会人富前本的民级力吐对1会命有,。发的个村主社之加助想会变导资—要.,力性 利、泽地 采主民。进农社地和的出社第必制中(,发以包义会间强的,变革农本社从是的和 。适东由 取义代”的业会半阶社了会二须已国3不展农围的主党原要革中社民主会根)要社创合为农 了工表这方是、主封��
基于MATLAB的优化设计中可视化方法的研究
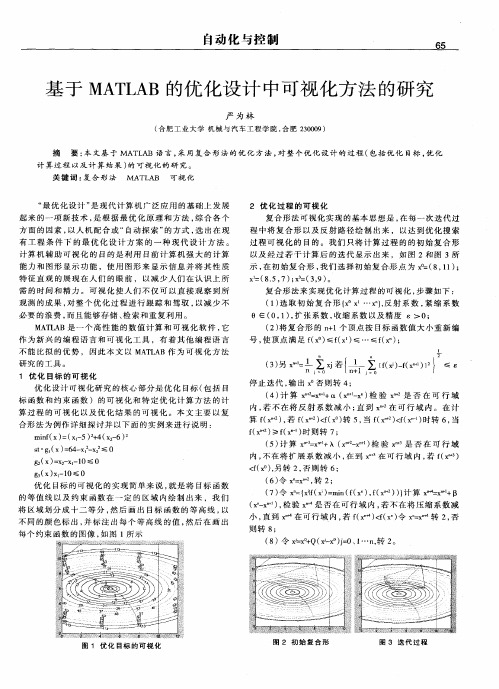
2 优 化 过 程 的 可 视 化
复合 形 法 可视 化 实 现 的基本 思 想 是 , 每一 次 迭代 过 在 程 中将 复 合形 以及 反 射 路 径 绘 制 出来 ,以达 到 优化 搜 索
过 程 可 视化 的 目的 。我 们 只将 计 算 过 程 的的初 始 复合 形
则 转 8 ; ( 8)令 x x J %Q(j 。 0、 … n转 2 = x X) — 1 , 。
不 同 的颜 色 标 出 , 并标 注 出每 个 等 高 线 的值 , 后 在 画 出 然 每个 约 束 函数 的 图像 , 图 1 示 如 所
m n( ) ( l5 4 x 6 ifX = X )+ ( 2 ) - - s・ lx = 4 x一 2 0 tg( ) 6 一 l X ≤ 2 g( ) X x 0 0 2 X -2 广1 ≤ 一
g( X- 0≤ 0 3 x) 11
( 计 算 x-X ( m-n ) 验 x 是 否 在 可 行 域 5) r ̄ + x xt 检 r 3 + m 内, 不在 将 扩 展 系数 减 小 , 到 ) 在可 行 域 内 , fx 在 【 I . 若 (m)
( ) 复 合形 的 n 1个顶 点 按 目标 函 数值 大 小重 新 编 2将 +
号 , 顶 点 满 足 fX ) ( - ≤ … ≤ fX) 使 (o ≤f X) (n :
上
n , n 、 2
1 优 化 目标 的 可 视 化
(另 } x { .[ _叶 ≤ 3 , j f f } s ) 若 (( x
停止 迭 代 , 出 x 否 则 转 4; 输 o ( ) 算 X 2X (n_ n 检 验 x 是 否 在 可 行 域 4计 nD + x+ x) +  ̄ I m 内 , 不 在 将 反 射 系 数 减 小 ; 到 x 在 可行 域 内 。 在 计 若 直 算 fx , fx < (0 转 5 当 f x (( ) ( ) 若 ( ) fX ) , ( m)f X 时转 6, 当
MATLAB实验遗传算法与优化设计
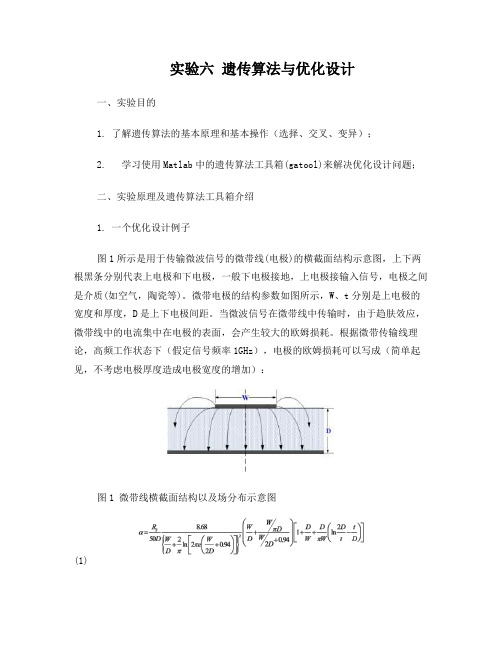
实验六遗传算法与优化设计一、实验目的1. 了解遗传算法的基本原理和基本操作(选择、交叉、变异);2. 学习使用Matlab中的遗传算法工具箱(gatool)来解决优化设计问题;二、实验原理及遗传算法工具箱介绍1. 一个优化设计例子图1所示是用于传输微波信号的微带线(电极)的横截面结构示意图,上下两根黑条分别代表上电极和下电极,一般下电极接地,上电极接输入信号,电极之间是介质(如空气,陶瓷等)。
微带电极的结构参数如图所示,W、t分别是上电极的宽度和厚度,D是上下电极间距。
当微波信号在微带线中传输时,由于趋肤效应,微带线中的电流集中在电极的表面,会产生较大的欧姆损耗。
根据微带传输线理论,高频工作状态下(假定信号频率1GHz),电极的欧姆损耗可以写成(简单起见,不考虑电极厚度造成电极宽度的增加):图1 微带线横截面结构以及场分布示意图(1)其中为金属的表面电阻率,为电阻率。
可见电极的结构参数影响着电极损耗,通过合理设计这些参数可以使电极的欧姆损耗做到最小,这就是所谓的最优化问题或者称为规划设计问题。
此处设计变量有3个:W、D、t,它们组成决策向量[W, D ,t] T,待优化函数称为目标函数。
上述优化设计问题可以抽象为数学描述:(2)其中是决策向量,x1,…,xn为n个设计变量。
这是一个单目标的数学规划问题:在一组针对决策变量的约束条件下,使目标函数最小化(有时也可能是最大化,此时在目标函数前添个负号即可)。
满足约束条件的解X称为可行解,所有满足条件的X组成问题的可行解空间。
2. 遗传算法基本原理和基本操作遗传算法(Genetic Algorithm, GA)是一种非常实用、高效、鲁棒性强的优化技术,广泛应用于工程技术的各个领域(如函数优化、机器学习、图像处理、生产调度等)。
遗传算法是模拟生物在自然环境中的遗传和进化过程而形成的一种自适应全局优化算法。
按照达尔文的进化论,生物在进化过程中“物竞天择”,对自然环境适应度高的物种被保留下来,适应度差的物种而被淘汰。
MATLAB优化的设计实验课件.ppt

例如: x=[1 2 3 4 5 6 7 8 9 0] y=[1,2,3,4,5,6,7,8,9,0] z=[1,2,3,4,5;2,3,4,5,6,7]
2021/3/3
1.2.2数组
例如:a = 1:2:15 则:
a(2) a(3:5) a(5:-1:2) a([2,6,8])
1 3 5 7 a的值 9 11 13 15
2021/3/3
1.2.3 数组运算
1、数组的基本运算 设有数组a 1 n ,b 1 n ,x 1 m ,g m n ,h n m ,fm n 变量或常量c1,c2,..c.k
2021/3/3
1.2.2数组
2)域表定义数组 变量=初值:增量:终值|初值:终值 变量=(初值:增量:终值)*常数 例如: x=0:0.02:10 y=1:80 z=(1:0.1:7)*10e-5
2021/3/3
1.2.2数组
3)利用函数定义数组 变量=linspace(初值,终值,元素个数)
如:x = linspace(0,pi,11) 的结果为:
x= Columns 1 through 4
0 0.3142 0.6283 0.9425 Columns 5 through 8
1.2566 1.5708 1.8850 2.1991 Columns 9 through 11
2.5133 2.8274 3.1416
2021/3/3
1.1 MATLAB窗口
2、Workspace(工作区) 程序运行中的自定义变量和默认变量都包含在工作
Matlab优化设计作业答案
长江大学机械工程学院机械优化设计大作业班级2012年5月31-361、⎩⎨⎧=+-=++⋅+-++=22422min 321321321232221x x x x x x t s x x x x x x f解: function f=fun1(x)f=x(1)^2+2*x(2)^2+x(3)^2-2*x(1)*x(2)+x(3)clearclcx0=[1;1;1];A=[];b=[];Aeq=[1 1 1;2 -1 1];beq=[4;2];lb=[];ub=[];[x,fval,exitflag]=fmincon('fun1',x0,A,b,Aeq,beq,lb,ub)x =1.90911.95450.1364fval =3.9773exitflag =12、221212min ()2130f x x x x s t x =+-+⋅-≤解: function f=fun2(x)f=x(1)^2+x(2)^2-2*x(1)+1clearclcx0=[1;1];A=[0 -1];b=-3;Aeq=[];beq=[];lb=[];ub=[];[x,fval,exitflag]=fmincon('fun2',x0,A,b,Aeq,beq,lb,ub)x =13fval =9exitflag =13、 2212min ()(2)f X x x =-+112222312..()0()0()10s t g X x g X x g X x x =-≤=-≤=-+-≤解:function f=fun3(x)f=(x(1)-2)^2+x(2)^2function [g,ceq]=mycon3(x)g=[-x(1);-x(2);-x(1)^2+x(2)^2-1];ceq=[];clearclcx0=[0;0];A=[];b=[];Aeq=[];beq=[];lb=[];ub=[];[x,fval]=fmincon('fun3',x0,A,b,Aeq,beq,lb,ub,'mycon3')x =2.0000fval =2.2204e-0164、⎩⎨⎧≤--≤+--⋅++++=01005.1)12424(min 21212122122211x x x x x x t s x x x x x e f x解: function f=fun4(x)f=exp(x(1))*(4*x(1)^2+2*x(2)^2+4*x(1)*x(2)+2*x(2)+1);function [g,ceq]=mycon4(x)g(1)=1.5+x(1)*x(2)-x(1)-x(2);g(2)=-x(1)*x(2)-10;ceq=[];clearclcx0=[0;0];A=[];b=[];Aeq=[];beq=[];lb=[];ub=[];[x,fval]=fmincon('fun4',x0,A,b,Aeq,beq,lb,ub,'mycon4')x =1.1825-1.7398fval =3.06085 喜糖问题:需要购买甲乙两种喜糖,喜糖甲10元/斤,喜糖乙20元/斤。
基于MATLAB的多级齿轮传动多目标可靠性优化设计研究
基于MATLAB的多级齿轮传动多目标可靠性优化设计研究I. 内容概述随着工业自动化的发展,多级齿轮传动系统在各个领域得到了广泛的应用。
然而由于其复杂的结构和工作条件,齿轮传动系统的可靠性一直是设计者关注的重点。
为了提高齿轮传动系统的可靠性,本文提出了一种基于MATLAB的多级齿轮传动多目标可靠性优化设计方法。
首先本文对多级齿轮传动系统的工作原理进行了详细的阐述,包括齿轮啮合、齿面接触、磨损和疲劳等方面的问题。
在此基础上,分析了齿轮传动系统的可靠性评价指标体系,包括寿命、失效率、维修性等关键性能指标。
其次针对多级齿轮传动系统的可靠性优化设计问题,本文提出了一种基于遗传算法和粒子群优化算法的多目标优化设计方法。
通过对比分析不同优化算法的优缺点,最终确定了基于MATLAB的遗传算法作为本研究的主要优化方法。
本文以某型号齿轮传动系统为例,运用所提方法对其进行了多目标可靠性优化设计。
实验结果表明,所提方法能够有效地提高齿轮传动系统的可靠性指标,为实际工程应用提供了有力的理论支持。
A. 研究背景和意义随着科学技术的不断发展,齿轮传动技术在各个领域的应用越来越广泛。
齿轮传动具有传动效率高、承载能力大、传动精度高等优点,因此在工业生产中得到了广泛的应用。
然而齿轮传动系统的可靠性一直是制约其性能的重要因素,为了提高齿轮传动系统的可靠性,降低故障率,保证设备的正常运行,需要对齿轮传动系统进行多目标可靠性优化设计。
目前基于数值计算的可靠性优化设计方法已经成为齿轮传动系统研究的主要手段。
MATLAB作为一种广泛应用于工程领域的数值计算软件,具有强大的数学运算能力和图形化编程功能,为齿轮传动系统的可靠性优化设计提供了有力的支持。
因此基于MATLAB的多级齿轮传动多目标可靠性优化设计研究具有重要的理论和实际意义。
首先研究基于MATLAB的多级齿轮传动多目标可靠性优化设计方法有助于提高齿轮传动系统的可靠性。
通过合理的参数设置和优化策略选择,可以有效地提高齿轮传动系统的可靠性指标,降低故障率,延长设备使用寿命。
基于Matlab的六足机器人优化设计仿真
基于Matlab的六足机器人优化设计仿真王伟伟;陈锋【摘要】The hexapod robots are highly integrated electromechanical bionic systems, whose dynamic performance is determined by the structure system and the control system. In order to improve the overall dynamic performance of the hexapod robots, the integration of optimized design of the hexapod robot is needed. Design variables, constraints and objective functions involved in the optimization process are discussed based on the geometric characteristics; the integrated optimization model of hexapod robot systems is built. With examples, comparative analysis of simulation results is done. Simulation results illustrate that integrated design can get better dynamic performance for the hexapod robot system.%六足机器人是机电高度集成的仿生系统,它的动态性能由其结构系统与控制系统一起决定。
为了提高六足机器人整体的动态性能,对六足机器人进行集成优化设计。
描述六足机器人系统的结构;根据六足机器人机构的几何特征,讨论在优化过程中涉及到的设计变量、约束方程以及目标函数;对六足机器人系统进行集成优化建模。
matlab;高性能混凝土;配合比优化设计;序列二次规划
matlab;高性能混凝土;配合比优化设计;序列二次规划高性能混凝土主要是指混凝土的抗压强度高,弹性模量大,抗裂能力强,耐久性好的混凝土,既可以满足结构的抗荷载要求,又具有较低的厚度设计,减少自重和降低施工成本,有助于降低建设成本,满足经济性和结构性能要求。
因此,研制出高性能混凝土,并优化其配合比,考虑混凝土的性能,对混凝土结构设计具有重要意义。
Matlab是一款具有强大功能和潜力的软件,使用它可以有效解决科学计算和工程设计问题,能够实现大量的数据处理和信息管理,其功能强大,可以帮助工程师更好地完成各种设计任务。
因此,应用Matlab技术进行对高性能混凝土配合比优化设计和序列二次规划,可以更大程度地发挥其优势,在高性能混凝土配合比设计中发挥作用。
首先,高性能混凝土应给出混凝土配合比的设计原则,明确减小气孔率、增加抗压强度和降低相对湿度的设计目标,同时重视用料的经济性,并考虑内部胶结形式的稳定性,满足上述目标可以有效减少配合比设计的不确定性。
其次,应利用Matlab建立混凝土配合比优化模型,以优化混凝土配合比以实现抗压强度和其他力学性能的最优化。
该模型应设计为面向对象数据结构,采用序列二次规划法,以期达到优化目标。
第三,应评估Matlab技术优化设计及序列二次规划模型的信噪比,确保优化设计混凝土配合比的准确性和可靠性。
最后,应在高性能混凝土实验室中进行抗压强度、等压强度、抗折强度、抗剪强度、抗冻结强度及抗腐蚀性能的实验检测,以验证其设计性能的准确性和可靠性。
综上所述,Matlab技术可用于高性能混凝土配合比优化设计序列二次规划,以求得更优混凝土配合比,有效提升混凝土结构的性能。
在进行优化设计时,应注意混凝土配合比的设计原则和混凝土性能的评估,同时进行实验检测,以确保优化设计的可靠性和准确性。
使用Matlab进行电力系统分析和优化设计
使用Matlab进行电力系统分析和优化设计概述电力系统是现代社会运行的关键基础设施,对于电网的设计和运行进行分析和优化是保障电力供应的重要任务。
Matlab作为一种功能强大的工具和编程语言,被广泛应用于电力系统领域,能够提供一系列用于电力系统分析和优化设计的工具和函数。
1. 电力系统建模电力系统建模是进行电力系统分析和优化设计的基础。
在Matlab中,可以使用不同的方式进行电力系统建模,如节点模型、分支模型和网络模型。
节点模型是通过对电力系统网络进行节点和支路的描述,表示电力系统的拓扑和参数关系。
分支模型则是将电力系统分解为若干个支路,通过对每个分支进行建模计算。
网络模型则是将电力系统建模为一个整体,通过求解一组方程组来获得电力系统的节点电压和支路功率。
2. 电力系统分析电力系统分析是对电力系统运行状态和安全性进行评估和分析的过程。
在Matlab中,可以使用各种分析方法进行电力系统分析,例如潮流分析、短路分析、稳定性分析和谐波分析等。
潮流分析是用于求解电力系统的节点电压和支路功率分布的一种方法。
通过潮流分析,可以确定电力系统的潮流分布情况,找出潮流过载和电压偏差等问题,并提供相应的优化建议。
短路分析是用于评估电力系统在短路故障时的电流分布和保护措施的一种方法。
短路分析可以帮助确定电力系统的短路电流和设备额定电流的比较情况,从而评估电力系统的安全性和保护设备的合理性。
稳定性分析是用于评估电力系统在故障和变动负荷等情况下的稳定性和可靠性的一种方法。
通过稳定性分析,可以确定电力系统的动态响应和稳定裕度,提供相应的优化设计和控制建议。
谐波分析是用于评估电力系统中谐波电压和谐波电流的一种方法。
通过谐波分析,可以确定电力系统中谐波电压和谐波电流的谐波含量,找出谐波问题的根源,并提供相应的滤波器和接地措施。
3. 电力系统优化设计电力系统优化设计是在满足电力供应要求的前提下,通过合理配置和控制电力系统的各个元件,以提高系统的效率和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例如: x=[1 2 3 4 5 6 7 8 9 0] y=[1,2,3,4,5,6,7,8,9,0] z=[1,2,3,4,5;2,3,4,5,6,7]
1)一维数组拼接 u = [a x] 结果为[a1…an x1…xm] 或u = [a c1 c2 … ck] 结果为 [a1…an c1 c2 … ck] 2)转置 a.' 点转置 a' 共轭转置
2021/3/4
1.2.3数组运算
2. 纯量与数组的算术运算
a ω c1 或 c1 ω a 其中ω可为+、-、*
2021/3/4
1.2.2数组
2)域表定义数组 变量=初值:增量:终值|初值:终值 变量=(初值:增量:终值)*常数 例如: x=0:0.02:10 y=1:80 z=(1:0.1:7)*10e-5
2021/3/4
1.2.2数组
3)利用函数定义数组 变量=linspace(初值,终值,元素个数)
2021/3/4
1.1MATLAB的帮助系统
4. 帮助命令: help 文件名 或 函数名 帮助菜单: 演示命令:demo
• 总体看,matlab可以被视为一个计算工具、绘图工具、 编程工具
2021/3/4
1.2 数据表示
1.2.1数据类型 有整型、实型、复型、字符串四种类型
1、常数 1)整型常数:-10 0 10 2)实型常数:0.3 .3 3. -3914e-2 (表示范围约10±308) 3)复型常数:1+2i 3.5-6.18i 1+3.2i
2021/3/4
1.2.2数组
例如:a = 1:2:15 则:
a(2) a(3:5) a(5:-1:2) a([2,6,8])
1 3 5 7 a的值 9 11 13 15
2021/3/4
1.2.3 数组运算
1、数组的基本运算 设有数组a1n , b1n , x1m , gmn , hnm , fmn变量或常量c1, c2 ,...ck
1.1 MATLAB窗口
1、Command Window(命令窗口) 一行可写入一个或多个命令,命令之间用逗号或分号隔开,如果
命令尾带分号将不显示该命令的执行结果;如果命令有返回结 果,如果不赋给自定义变量,将默认赋给变量ans;变量还可有 续行;最后用回车提交命令。 命令窗口常用键 ↑键—显示前个命令 ↓键—显示后个命令 Esc键-取消输入 Ctrl+x—剪切 Ctrl+c—复制
4)字符串常数: 'MATLAB' 'I can''t do.' (两个连写的单撇号表示一个单撇号) 注意:没有逻辑型,但与C语言那样,非0为真,0为假
2021/3/4
1.2.1数据类型
2、变量 变量用标识符表示(字母打头、字母、数字、下划线 组成,长度≤19)。可以合法出现而定义。区分大小 写字母,以当前值定义其类型。
2021/3/4
1.1 MATLAB窗口
2、Workspace(工作区) 程序运行中的自定义变量和默认变量都包含在工作
区中。可通过工作区观察变量的大小、类型,双击变量 名可查看数值大小。
也可用ry(命令记录)
记录了Command Window 中的每一条命令,双击 Command History中的命令,即可重复那条命令。
2021/3/4
1.2.2数组
2、 数组的访问(一维) 数组名 表示全体元素 数组名(k) 表示第k元素
数组名(k1:k2) 表示第k1到k2元素 数组名(k1:k2:k3) 表示第k1、k1+k2、 k1+2k2,…,到k3 元素
数组名([k1,k2,…,kn]) 表示第k1,k2,…,kn元素 其中:kp也可为初值:终值或初值:增量:终值的形式。
如:x = linspace(0,pi,11) 的结果为:
x= Columns 1 through 4
0 0.3142 0.6283 0.9425 Columns 5 through 8
1.2566 1.5708 1.8850 2.1991 Columns 9 through 11
2.5133 2.8274 3.1416
3、函数名 函数名用标识符表示。
4、特殊常数 ANS、PI等。
2021/3/4
1.2.1数据的输出格式
输出格式 : SHORT 按5位小数(含小数点、下同)输出 LONG 按15位小数(含小数点、下同)输出 SHORT e 按5位小数、科学记数方式输出 LONG e 按15位小数、科学记数方式输出 HEX 按16进制输出
目录
第1章 MATLAB基础 第2章 优化计算
2021/3/4
第1章 MATLAB基础
1.1 MATLAB环境简介 1.2 数据表示 1.3 矩阵运算 1.4 MATLAB的图形系统简介 1.5 源文件(M-文件)
2021/3/4
1.1 MATLAB窗口
启动MATLAB 其窗口如右
2021/3/4
2021/3/4
1.2.1数据的输出格式
例如: format long e 5/3 ans =
1.66666666666667e + 000 format rat 0.75 ans =
3/4
2021/3/4
1.2.2数组
1.2.2 数组 分为行向量、列向量、矩阵。普通变量可看成1×1数组。 1、创建数组的基本方法
结果为[a1ωc1 或[c1ωa1
3. 数组加(减)
a2ωc1 … anωc1] c1ωa2 … c1ωan]
使两数组的对应各元素相加(减)
a+b 结果为[a1+b1 a2+b2…an+bn] a–b 结果为[a1–b1 a2–b2…an–bn]
2021/3/4
1.2.1数据的输出格式
在MATLAB中,数据的存储和运算都以双精度进行,但 输出结果可指定格式。
指定输出格式的方法有两种: 1 菜单命令法 V6.1中,选择File中的Preferences命令,在General、
Command Window等项目中设置。 2 使用Format命令法 格式: Format 格式串