主要介绍二维图形几何变换三维图形几何变换参数图形几何共43页
合集下载
第六讲二维及三维空间的变换概念及其矩阵表示-精品
20133152013315?几何变换二维变换齐次坐标系和二维变换的矩阵表示二维变换的复合窗口到视口的变换效率问题三维变换的矩阵表示三维变换的复合坐标系的变换二维及三维空间的变换概念矩阵表示三维视图二维三维空间的变换概念及其矩阵表示2013315几何变换本讲介绍计算机图形学经常用到的基本的二维和三维几何变换其中的平移变换比例变换和旋转变换对很多图形应用程序来说极其重要
现在考虑绕任意一点P1旋转物体的问题。 1)将P1点平移到原点; 2)旋转; 3)平移还原P1点。
2019/11/20
二维变换的复合(例二)
关于任意 点P1比例 变换一个 物体。
2019/11/20
二维变换的复合(小结)
假设我们想要使图中的房子以任意点P1为中心进行旋转、平移和缩放(比例)变换 。这时具体步骤与上述类似:先将点P1平移到原点,待完成比例变换和旋转变换后 再将房子从坐标原点平移到新的位置P2,因此记录变换的数据结构可以是包含比例 变换因子、旋转角、平移量和变换顺序的数据结构,或者只是简单地记录复合变换
过除以W)而得到形式为(x,y,1)的
坐标,因此,齐次化的点就形成
平面
了(x,y,W)空间中的一个平面,由等
式W=1定义。图中示出了这种联 系,注意:无穷远点没表示在该 平面中。
XYW齐次坐标系,其中示有W=1的平面和投影 到该平面上的点P(X,Y,W)
2019/11/20
二维变换的矩阵表示
平移变换
0, 10
1
绕x旋转
Rx()
0 0
0
cos sin
0
sin cos
0 0. 0
Байду номын сангаас
0 0 0 01
0 0
现在考虑绕任意一点P1旋转物体的问题。 1)将P1点平移到原点; 2)旋转; 3)平移还原P1点。
2019/11/20
二维变换的复合(例二)
关于任意 点P1比例 变换一个 物体。
2019/11/20
二维变换的复合(小结)
假设我们想要使图中的房子以任意点P1为中心进行旋转、平移和缩放(比例)变换 。这时具体步骤与上述类似:先将点P1平移到原点,待完成比例变换和旋转变换后 再将房子从坐标原点平移到新的位置P2,因此记录变换的数据结构可以是包含比例 变换因子、旋转角、平移量和变换顺序的数据结构,或者只是简单地记录复合变换
过除以W)而得到形式为(x,y,1)的
坐标,因此,齐次化的点就形成
平面
了(x,y,W)空间中的一个平面,由等
式W=1定义。图中示出了这种联 系,注意:无穷远点没表示在该 平面中。
XYW齐次坐标系,其中示有W=1的平面和投影 到该平面上的点P(X,Y,W)
2019/11/20
二维变换的矩阵表示
平移变换
0, 10
1
绕x旋转
Rx()
0 0
0
cos sin
0
sin cos
0 0. 0
Байду номын сангаас
0 0 0 01
0 0
六讲二维及三维空间的变换概念及其矩阵表示-精品
旋转之前
旋转之后
房子的旋转变 换,旋转的同 时也改变了位 置。
旋转矩阵的推导
小结
2020/7/31
r
正向旋转
r
其中:
齐次坐标系和二维变换的矩阵表示
齐次坐标表示
平移矩阵 平移变换
2020/7/31
P=T+P P=S•P P=R•P
希望能用一种一致的方法来表示这三种变换。
将(x,y)附加第三个坐标,于是每个点的坐标都用 一个三元组(x,y,W)来表示,称为点(x,y)的齐次 坐标。在齐次坐标系中,我们认为两组齐次坐标 (x,y,W)和(x,y,W)代表同一点当且仅当(x,y,W)与 (x,y,W)互为倍数,因此(2,3,6)和(4,6,12)是用不同 的三元组坐标表示的同一点。也就是说每个点齐次
坐标不唯一。要求齐次坐标中至少有一个不为零, 即(0,0,0)是不允许的。如果坐标W不为零,那么我 们可以用它作为除数:由(x,y,W)得到(x/W,y/W,1), 它们代表同一点。一般来说,当W不为零时,我们 采用W为1的坐标,并将x/W和y/W称为齐次点 (x,y,W)的笛卡儿坐标。而W=0的点被称为无穷远点 ,在这里我们不讨论此类点。
SHx[x y 1]T=[x+ay y 1] T,表示在 x方向上的比例变化是y的函数。
SHy[x y 1]T=[x bx+y 1] T表示在y 方向上的比例变化是x的函数。
二维变换的复合(例一)
(x1,y1)
(x1,y1)
现在考虑绕任意一点P1旋转物体的问题。 1)将P1点平移到原点; 2)旋转; 3)平移还原P1点。
射变换,只保留线段之间的平行关系,不 保持长度和角度不变。
既不会变成单位边长的菱形,也不会变成非单位边长的正方形。这种变换也被称
第六讲:二维及三维空间的变换概念及其矩阵表示
齐次坐标几何意义
三元组一般用来表示三维空间中
的点,但是此处是用来表示二维
空间的点。这两种表示之间具有
以下联系:如果取所有代表同一
点的三元组,即所有形式为
(tx,ty,W)的三元组(其中t≠0),
便可得到三维空间中的一条直线,
因此,每一个齐次点就代表了三
维空间中的一条直线。又由于我
们可以将一点的坐标齐次化(通
本讲介绍计算机图形学经常用到的基本的二维和三维几何变换,其 中的平移变换、比例变换和旋转变换对很多图形应用程序来说极其 重要。 许多应用程序或图形子程序软件包需要用到各种变换,例如:一个 城市规划程序,利用平移变换将表示建筑物和树木的图符移到合适 的位置,利用旋转变换确定图符的朝向,以及利用比例变换确定图 符的大小。一般来说,很多应用程序在绘图时都要用到几何变换来 改变物体(也称为图符或模板)的位置、方向和大小。本讲还介绍 如何应用三维变换(旋转变换、平移变换和比例变换)作为创建三维 物体的二维显示过程的一部分。
射变换,只保留线段之间的平行关系,不 保持长度和角度不变。
既不会变成单位边长的菱形,也不会变成非单位边长的正方形。这种变换也被称
为刚体变换,因为进行变换的物体不会有任何变形。任意顺序的旋转、平移变换
都等同于这种形式的矩阵。
一系列任意的旋转、平移和比例变换的结果又是如何呢?这些变换称为仿射变换
,它们能够保持直线平行性,但不角和不保长。如上图所示,其中先将一个单位
单位正方体
方体在x方向上错切
正方体在y方向上错切
对单位正方体进行简单的错切变换, 每一种变换情况,斜边的长度都超过了1。
二维的错切变换分为两种:沿x轴的错切变换和沿y轴的错切变换。上图 示出了沿两个轴错切一个单位正方体的效果。
计算机图形学-变换

1
第3章 变换
基本的二维几何变换 二维复合变换 其他二维变换 三维几何变换 OpenGL几何变换函数 三维图形的显示流程 投影 裁剪
2
几何变换
应用于对象几何描述并改变它的位置、方 向或大小的操作称为几何变换(geometric transformation) 基本的二维几何变换包括平移、旋转和缩 放
8
矩阵表示和齐次坐标
许多图形应用涉及到几何变换的顺序 需要用一个通式来表示平移、旋转和缩放
P M1 P M 2
将2×2矩阵扩充为3×3矩阵,可以把二维几 何变换的乘法和平移项组合为单一矩阵表示
9
二维平移矩阵
x 1 0 t x x y 0 1 t y y 1 0 0 1 1
三维坐标轴旋转
X轴坐标不变,循环替代x、y、z三个 轴可以得到绕x轴旋转的公式
z
y ' y cos z sin
y
z ' y sin z cos x' x
x
35
三维坐标轴旋转
y轴坐标不变,循环替代x、y、z三个 轴可以得到绕y轴旋转的公式
x
z
y
z ' z cos x sin x' z sin x cos y' y
glMatrixMode (GL_MODELVIEW); glColor3f (0.0, 0.0, 1.0); glRecti (50, 100, 200, 150); //显示蓝色矩形
glColor3f (1.0, 0.0, 0.0); glTranslatef (-200.0, -50.0, 0.0); glRecti (50, 100, 200, 150); //显示红色、平移后矩形
第3章 变换
基本的二维几何变换 二维复合变换 其他二维变换 三维几何变换 OpenGL几何变换函数 三维图形的显示流程 投影 裁剪
2
几何变换
应用于对象几何描述并改变它的位置、方 向或大小的操作称为几何变换(geometric transformation) 基本的二维几何变换包括平移、旋转和缩 放
8
矩阵表示和齐次坐标
许多图形应用涉及到几何变换的顺序 需要用一个通式来表示平移、旋转和缩放
P M1 P M 2
将2×2矩阵扩充为3×3矩阵,可以把二维几 何变换的乘法和平移项组合为单一矩阵表示
9
二维平移矩阵
x 1 0 t x x y 0 1 t y y 1 0 0 1 1
三维坐标轴旋转
X轴坐标不变,循环替代x、y、z三个 轴可以得到绕x轴旋转的公式
z
y ' y cos z sin
y
z ' y sin z cos x' x
x
35
三维坐标轴旋转
y轴坐标不变,循环替代x、y、z三个 轴可以得到绕y轴旋转的公式
x
z
y
z ' z cos x sin x' z sin x cos y' y
glMatrixMode (GL_MODELVIEW); glColor3f (0.0, 0.0, 1.0); glRecti (50, 100, 200, 150); //显示蓝色矩形
glColor3f (1.0, 0.0, 0.0); glTranslatef (-200.0, -50.0, 0.0); glRecti (50, 100, 200, 150); //显示红色、平移后矩形
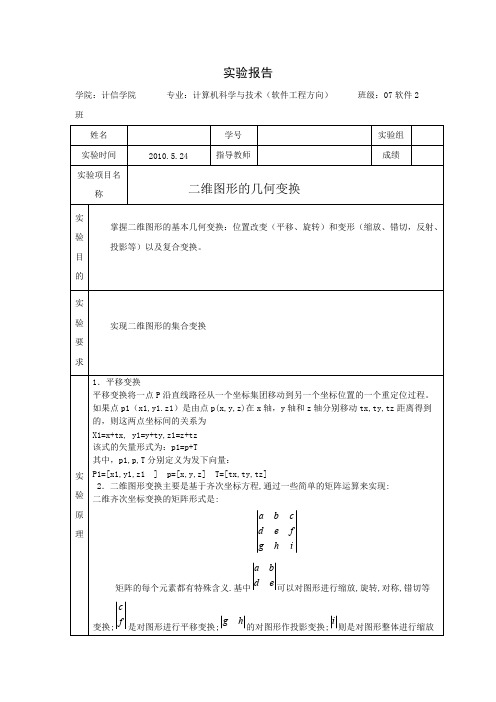
二维图形的几何变换
pDC->MoveTo(xy1[0][0]+200,xy1[0][1]+160);//画对称轴 pDC->LineTo(xy1[1][0]+200,xy1[1][1]+160); //对称变换,利用斜率特性,若两直线垂直,则 k1=-1/k2 //只针对三角形 for(int i=0;i<3;i++){
实
验
硬件平台:PC
环
运行环境:Windows 平台,Visual C++
境
实 1.编写程序完成实验内容的要求
验 2.实验总结。
步
骤
1.设有一三角形 ABC,其中三个顶点为 A(5,10),B(1,2),C(8,5),如三角形的顶点 A 不 实
变,将 AB 和 AC 边缩小一倍后,求缩小后的三角形对于直线-2x+4y+3=0 的对称变换后
xy[3][0]=120; xy[3][1]=100; } void CMyDlg::OnPaint() { CWnd* pWnd=GetDlgItem(IDC_STATIC); CDC* pDC=pWnd->GetDC(); pDC->SetViewportOrg(200,160); pDC->MoveTo(0,-150);//控制纵向坐标
y
ty
T
(tx, ty)
y
1 0 0 1 1 1
1
其中:x1,y1 是变换后的坐标,x,y 是变换前的坐标,通过上述变换,(x,y)被平移了
P(tx,ty). 在二维平面上任何复杂的变换都可以通过上述基本变换的组合来实现.级合方式在计算机上 主要体现在矩阵的乘法运算,即将各个简单变换的矩阵逆序相乘,就可以得到一个总的变换 矩阵.利用这个总的变换矩阵就可以对图形进行复合变换.
计算机图形学之图形变换
4 T
3
2 p
1
0
012 34 567 8
线段和多边形的平移可以通过顶点的
平移来实现。同样线段和多边形的其它几 何变换也可以通过对顶点的几何变换来实 现。
2. 旋转变换(Rotation) 二维旋转有两个参数:
旋转中心: 旋转角:
?
6 P’
5
4
3
P
2
1
0
012 34 567 8
设OP与x轴的夹角为 则:
由于采用齐次坐标矩阵表示几何变换, 多个变换的序列相应地可以用矩阵链乘来表 示。
需要注意:先作用的变换其矩阵在右边, 后作用的变换其矩阵在左边。
变换函数
平移变换 void glTanslate{fd}(TYPE x, TYPE y, TYPE z);
旋转变换 void glRotate{fd}(TYPE angle, TYPE x, TYPE y, TYPE z); 绕矢量v=(x,y,z)T逆时针方向旋转angle指定的角度。 旋转角度的范围是0~360度。当angle=0时, glRotate()不起作用。
二维旋转有两个参数: 旋转中心: 旋转角:
上述变换可以分解为三个基本变换:
•平移:
•旋转:
•平移: 回原位。
使旋转中心移到坐标原点; 使旋转中心再移
二维旋转有两个参数: 旋转中心: 旋转角:
因此上述变换可以写成矩阵乘积形式:
4. 5 基本三维几何变换(Basic three-dimensional geometric transformation)
1. 矩阵表示(Matrix representation) 前面三种变换都可以表示为如下的矩
阵形式
第六讲二维及三维空间的变换概念及其矩阵表示-精品
窗口到视口的变换
2019/11/20
所期望的结果点坐标由 P =Mwv •[x y 1]T
P 代表了视口内新点坐标,[x,y,1] 代表了窗口内点坐标.
视图变换:就是把用户坐标系表 示的点在视口坐标系表示出来。 将一个空间坐标系的窗口变换到 视口的步骤:
窗口到视口的变换步骤
2019/11/20
窗口的剪切和视口的关系
பைடு நூலகம்
x=xr11+y r12+tx y=xr21+y r22+ty
如果有些硬件的矩阵乘法器具有并行加法器和乘法器,那么无需考虑这一效率问 题。
旋转方程R()需要进行四次乘法和两次加法,当θ 角非常小时(只有几度), cosθ 非常接近于1,根据这一点可减少计算量,因此旋转变换公式可近似地表示 成:
矩阵的数据结构:
T(x2,y2) ·R() ·S(sx,sy) ·T(-x1,-y1)
如果M1和M2分别代表一个基本的平移变换、比例变换或旋转变换,那么在什么情 况下有M1·M2=M2·M1呢?或者说,何时M1和M2可交换呢?当然,一般来说矩阵乘 法是不可交换的,但是,在下面的特殊情况下,是可以进行交换的:
这种近似上一个公式要好。
2019/11/20
三维变换的矩阵表示(坐标系)
在齐次坐标系中,二维变换可以用3×3的矩阵表示,假定我们也用 齐次坐标来表示三维空间中的点,那么三维变换便可用4×4的矩阵 表示。因此,我们用(x,y,z,W)而不是(x,y,z)来表示三维空间中的一
点,其中若一个四元组是另一个四元组的非零倍数,则认为它们代 表同一点,并且四元组(0,0,0,0)是不允许的。和二维空间一样,任 意点(x,y,z,W)(W≠0)的标准表示为(x/W,y/W,z/W,1),将坐标转化 成这种形式被称为齐次化,而W为零的点则称为无穷远点。同样,
二维图形几何变换
矩阵表示法的定义和意义
矩阵表示法的具体形式和计算方法
矩阵表示法在二维图形几何变换中的应用和实现
定义:矩阵的加法运算是指将两个矩阵的对应元素相加,得到一个新的矩阵。
性质:矩阵的加法满足交换律和结合律,即A+B=B+A,(A+B)+C=A+(B+C)。
பைடு நூலகம்
运算规则:两个矩阵相加时,必须保证它们的维度相同,即行数和列数分别相等。
添加标题
添加标题
添加标题
矩阵变换的基本概念:介绍矩阵和几何变换的基本概念,以及它们之间的关系。
添加标题
矩阵变换的种类:列举常见的二维图形几何变换,如平移、旋转、缩放、错切等,并解释如何通过矩阵运算实现这些变换。
添加标题
矩阵变换的步骤:详细介绍如何通过矩阵运算实现二维图形的平移、旋转、缩放和错切等几何变换的步骤,包括变换前后的矩阵表示和计算过程。
汇报人:
,a click to unlimited possibilities
01
02
03
04
05
二维图形几何变换是指对二维图形进行旋转、平移、缩放等操作,使其在几何上发生变化的过程。
通过二维图形几何变换,可以实现图形的重新排列、调整和优化,从而满足不同的设计需求。
二维图形几何变换的基本要素包括原点、方向、角度和比例等,这些要素决定了变换的具体效果。
性质:逆矩阵与原矩阵的乘积为单位矩阵
应用:在二维图形几何变换中,矩阵的逆运算可用于还原图形的原始位置和形状
图像处理:平移变换常用于图像处理中的缩放、旋转等操作,以提高图像质量和分辨率。
动画制作:在动画制作中,平移变换可以用来实现角色或物体的移动、缩放等效果,增强视觉效果和表现力。
矩阵表示法的具体形式和计算方法
矩阵表示法在二维图形几何变换中的应用和实现
定义:矩阵的加法运算是指将两个矩阵的对应元素相加,得到一个新的矩阵。
性质:矩阵的加法满足交换律和结合律,即A+B=B+A,(A+B)+C=A+(B+C)。
பைடு நூலகம்
运算规则:两个矩阵相加时,必须保证它们的维度相同,即行数和列数分别相等。
添加标题
添加标题
添加标题
矩阵变换的基本概念:介绍矩阵和几何变换的基本概念,以及它们之间的关系。
添加标题
矩阵变换的种类:列举常见的二维图形几何变换,如平移、旋转、缩放、错切等,并解释如何通过矩阵运算实现这些变换。
添加标题
矩阵变换的步骤:详细介绍如何通过矩阵运算实现二维图形的平移、旋转、缩放和错切等几何变换的步骤,包括变换前后的矩阵表示和计算过程。
汇报人:
,a click to unlimited possibilities
01
02
03
04
05
二维图形几何变换是指对二维图形进行旋转、平移、缩放等操作,使其在几何上发生变化的过程。
通过二维图形几何变换,可以实现图形的重新排列、调整和优化,从而满足不同的设计需求。
二维图形几何变换的基本要素包括原点、方向、角度和比例等,这些要素决定了变换的具体效果。
性质:逆矩阵与原矩阵的乘积为单位矩阵
应用:在二维图形几何变换中,矩阵的逆运算可用于还原图形的原始位置和形状
图像处理:平移变换常用于图像处理中的缩放、旋转等操作,以提高图像质量和分辨率。
动画制作:在动画制作中,平移变换可以用来实现角色或物体的移动、缩放等效果,增强视觉效果和表现力。
计算机图形学第讲图形变换详解演示文稿
图形的拓扑关系不变
3
第3页,共46页。
本讲内容
齐次坐标表示法
常见的二维图形几何变换
平移变换 比例变换 旋转变换 对称变换 错切变换
变换矩阵的功能分区 图形的复合变换
4
第4页,共46页。
齐次坐标表示法
将一个原本是n维的向量用一个n+1维向量表示
(x1, x2 ,..., xn )
a
1
0
y
y
ax
1 0 0 1 1 1
➢ 简写为: p = Tp
x
26
第26页,共46页。
本讲内容
齐次坐标表示法 常见的二维图形几何变换
平移变换 比例变换 旋转变换 对称变换 错切变换
变换矩阵的功能分区
图形的复合变换
27
第27页,共46页。
变换矩阵的功能分区
变换矩阵可用3×3矩阵来描述
连续平移变换
得到连续平移变换的复合矩阵T为:
1 0 tx2 1 0 tx1 1 0 tx2 tx1
T T2T1 0
1
t
y
2
0
1
t
y1
0
1
tx
2
t
y1
0 0 1 0 0 1 0 0 1
即连续的平移变换是平移量的相加
37
第37页,共46页。
连续比例变换
设点P(x,y)经过第一次比例变换T1(Sx1,Sy1)和第二次比 例变换T2(Sx2,Sy2)后的坐标为P'' (x'',y'')
y
'
y
Ty
0
1
Ty
y
1 1 0 0 1 1
3
第3页,共46页。
本讲内容
齐次坐标表示法
常见的二维图形几何变换
平移变换 比例变换 旋转变换 对称变换 错切变换
变换矩阵的功能分区 图形的复合变换
4
第4页,共46页。
齐次坐标表示法
将一个原本是n维的向量用一个n+1维向量表示
(x1, x2 ,..., xn )
a
1
0
y
y
ax
1 0 0 1 1 1
➢ 简写为: p = Tp
x
26
第26页,共46页。
本讲内容
齐次坐标表示法 常见的二维图形几何变换
平移变换 比例变换 旋转变换 对称变换 错切变换
变换矩阵的功能分区
图形的复合变换
27
第27页,共46页。
变换矩阵的功能分区
变换矩阵可用3×3矩阵来描述
连续平移变换
得到连续平移变换的复合矩阵T为:
1 0 tx2 1 0 tx1 1 0 tx2 tx1
T T2T1 0
1
t
y
2
0
1
t
y1
0
1
tx
2
t
y1
0 0 1 0 0 1 0 0 1
即连续的平移变换是平移量的相加
37
第37页,共46页。
连续比例变换
设点P(x,y)经过第一次比例变换T1(Sx1,Sy1)和第二次比 例变换T2(Sx2,Sy2)后的坐标为P'' (x'',y'')
y
'
y
Ty
0
1
Ty
y
1 1 0 0 1 1
第6章 二维图形变换
可以看出,a>1, d=1,变换后图形沿X方向放大, 显然,当0<a<1,d=1时,使图形沿X方向缩小 当a=1,d>1时,则使图形沿Y方向放大
17
a>1, d=1,变换后
图形沿X方向放大
当a=1,d>1时,则使 图形沿Y方向放大
18
②若取a=1,d=0,图形沿Y方向压缩成线段,如下图所示 x y x ' y'
即
意一点(x,y)变换后坐标为: a b x y ax cy bx dy c d
式中
x'
y'
15
x'
y' 是变换后的坐标
x' ax cy 这是我们熟悉的关于直角坐标变换因子。 y' bx dy a b 由上式可知,变换矩阵 T c d 中各元素决定着图形
则
x'
y' x
cos sin y sin cos
25
0 1 逆时钟旋转=90度时,变换矩阵 T 1 0 0 1 顺时针旋转= -90度时, T 1 0 1 0 T =180度时, 0 1
ty tx
7
(2)比例变换 一个图形中的坐标点(x,y),若在X轴方向有一个比 例系数 Sx,在 Y 轴方向有一个比例系数 Sy,则该图形的新 坐标点(x',y')的表达式为 x' = xSx y' = ySy; 这一变换称为比例变换。 比例变换不仅改变图形的位臵,而且改变图形的大小
8
(3)旋转变换 若图形中的坐标点( x,y)绕坐标原点逆时针旋转一 个角度θ ,则该点变换后的新坐标( x‘,y’)与交换前 的坐标(x,y)的关系为: x' = xcosθ - ysinθ y' = xsinθ + ycosθ 旋转变换只能改变图形的方位,而图形的大小和形状 不变,