种子包衣机自动控制系统设计与实现
基于PLC的种子包衣机自动控制系统设计与实现
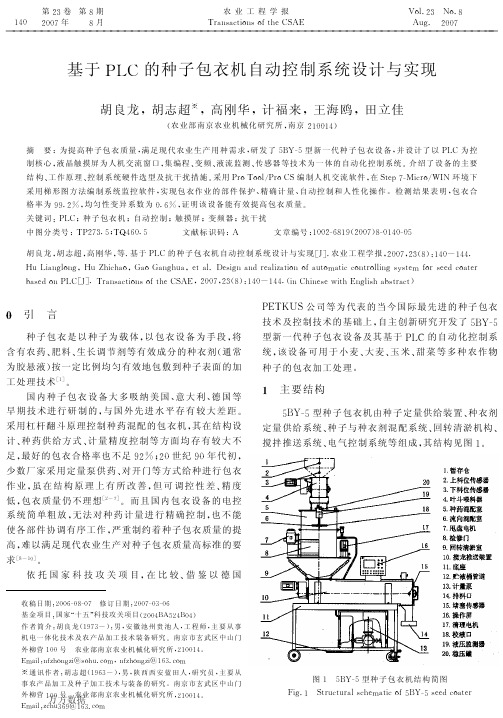
第!"卷第#期!$$%年#月农业工程学报&’()*(+,-.)*./,0123456.78!"9.8#4:;8!$$%基于<=2的种子包衣机自动控制系统设计与实现胡良龙>胡志超?>高刚华>计福来>王海鸥>田立佳@农业部南京农业机械化研究所>南京!A $$A B C摘要D 为提高种子包衣质量>满足现代农业生产用种需求>研发了E F G H E 型新一代种子包衣设备>并设计了以<=2为控制核心>液晶触摸屏为人机交流窗口>集编程I 变频I 液流监测I 传感器等技术为一体的自动化控制系统J 介绍了设备的主要结构I 工作原理I 控制系统硬件选型及抗干扰措施J 采用<’.&..7K <’.23编制人机交流软件>在3,1L %H M-+’.K NO 9环境下采用梯形图方法编制系统监控软件>实现包衣作业的部件保护I 精确计量I 自动控制和人性化操作J 检测结果表明>包衣合格率为P P 8!Q>均匀性变异系数为$8R Q>证明该设备能有效提高包衣质量J 关键词D <=2S 种子包衣机S 自动控制S 触摸屏S 变频器S 抗干扰中图分类号D &<!%"8E S &T BR $8E 文献标识码D 4文章编号D A $$!H R #A P @!$$%C #H $A B $H $E胡良龙>胡志超>高刚华>等8基于<=2的种子包衣机自动控制系统设计与实现U V W 8农业工程学报>!$$%>!"@#C D A B $XA B B 8Y :=-();7.);>Y :Z 0-+0(.>[(.[();0:(>1,(78\1*-;)()]’1(7-^(,-.)./(:,._(,-++.),’.77-);*‘*,1_/.’*11]+.(,1’a (*1].)<=2U V W 8&’()*(+,-.)*./,012345>!$$%>!"@#C D A B $XA B B 8@-)20-)1*1b -,05);7-*0(a *,’(+,C 收稿日期D !$$R H $#H $%修订日期D !$$%H $"H $R 基金项目D 国家c 十五d 科技攻关项目@!$$B F 4E !B F$B C 作者简介D 胡良龙@A P %"XC D 男>安徽池州贵池人>工程师>主要从事机电一体化技术及农产品加工技术装备研究J 南京市玄武区中山门外柳营A $$号农业部南京农业机械化研究所>!A $$A B J5_(-7D )/^0.);^-e *.0:8+._>)/^0.);^-eA R "8+._?通讯作者D胡志超@A P R "XC >男>陕西西安蓝田人>研究员>主要从事农产品加工及种子加工技术与装备的研究J 南京市玄武区中山门外柳营A $$号农业部南京农业机械化研究所>!A $$A B J5_(-7D ^+0:"R P eA R "8+._f 引言种子包衣是以种子为载体>以包衣设备为手段>将含有农药I 肥料I 生长调节剂等有效成分的种衣剂@通常为胶悬液C 按一定比例均匀有效地包敷到种子表面的加工处理技术U A WJ国内种子包衣设备大多吸纳美国I 意大利I 德国等早期技术进行研制的>与国外先进水平存有较大差距J 采用杠杆翻斗原理控制种药混配的包衣机>其在结构设计I 种药供给方式I 计量精度控制等方面均存有较大不足>最好的包衣合格率也不足P !QS !$世纪P $年代初>少数厂家采用定量泵供药I 对开门等方式给种进行包衣作业>虽在结构原理上有所改善>但可调控性差I 精度低>包衣质量仍不理想U !X %W J 而且国内包衣设备的电控系统简单粗放>无法对种药计量进行精确控制>也不能使各部件协调有序工作>严重制约着种子包衣质量的提高>难以满足现代农业生产对种子包衣质量高标准的要求U #X A $WJ依托国家科技攻关项目>在比较I 借鉴以德国<5&g h 3公司等为代表的当今国际最先进的种子包衣技术及控制技术的基础上>自主创新研究开发了E F G H E 型新一代种子包衣设备及其基于<=2的自动化控制系统>该设备可用于小麦I 大麦I 玉米I 甜菜等多种农作物种子的包衣加工处理Ji 主要结构E F G HE 型种子包衣机由种子定量供给装置I 种衣剂定量供给系统I 种子与种衣剂混配系统I 回转清淤机构I 搅拌推送系统I 电气控制系统等组成>其结构见图A J图A E F G HE 型种子包衣机结构简图j -;8A 3,’:+,:’(7*+01_(,-+./EFGH E *11]+.(,1’kk k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k $BA 万方数据!"!种子定量供给装置主要由叶斗式喂料器#减速机#变频器#料位传感器等组成$主要控制加工时的连续精确喂料$并监测暂存仓内物料状态%叶斗喂料器为&片叶片对称结构$采用变频无级调速$转速范围为’()&*+,-.$理论上额定每转容积可达//011,2$充满系数可选1"3%!"4种衣剂定量供给系统主要由贮药桶#柱塞式计量泵#变频器#稳压罐#液体监测器#校液口及管道等组成%变频器控制计量泵从贮药桶精确取液$经稳压罐后流经液体监测器$送至混配室或手动校液口%计量泵额定流量0512+6$采用变频无级调速$泵速范围为/1(73*+,-.8液体监测器用于监测工作过程中药液的有无%!"9种子与种衣剂混配系统主要由混配室#甩盘电机#同步齿形带#抛种甩盘#进液管#药液雾化盘等组成:见图0;$该系统关键部件采用了高速离心同步上下双甩盘结构$转速为/’11*+,-.%种子从进种口落到旋转的抛种甩盘上被均匀抛向四周8药液雾化盘为波纹形结构$种衣剂经进液管流到下甩盘时在离心力作用下被雾化$与其上端均匀散落种子充分接触#混合$有效的提高了包衣均匀度<//=%图0种子与种衣剂混配系统>-?"0@A*B C A B*D E F C6G,D A-C H I F G G J K C H D A-.?D?G.A,-L-.?F M F A G,!"N回转清淤机构主要有清理电机#毛刷#尼龙齿圈组成%尼龙齿圈在清理电机驱动下$带动毛刷将黏附在种子混配室斜壁上的种子及药液刮除$同时也起到一定搅拌作用%!"O搅拌推送系统该系统主要有减速机#搅龙机构#堵料传感器等组成$搅龙轴上安装以螺旋角’5P排列的拨锤和月牙式叶片%种药混合物被搅龙推送$在槽体内进一步的接触#搓擦$使种衣剂在种子表面均匀包敷$最后将物料排出机外%在搅龙出料口处设有阻旋式传感器$用于监测槽体内物料堆堵状况%!"Q电气控制系统本设备电气控制系统是以工业上通用的R2S:可编程序控制器;为控制核心$以液晶触摸屏为人机交流窗口$并结合相应软件#变频装置#液流监测器#料位传感器#堵料传感器及相应的执行元器件对包衣全程作业进行自动控制%4工作原理首先从触摸屏输入生产率#种子容重#种药混配比等参数$R2S接收后$由程序计算出喂料器和计量泵的工作频率$即喂种量和供药量%自动运行时$种衣剂被计量泵从贮液桶吸出$再由泵挤压推送流经稳压罐到液流监测器$后进入混配室内药液雾化盘被离心雾化8液流监测器检测到药液后$系统自动启动其它工作部件8经延时$喂料器开始喂料$种子落入混配室内抛种甩盘被均匀抛撒落下$与已雾化的种衣剂充分接触#混合#下落8黏附在清淤室斜壁上的种药混合物被毛刷刮除落下8种药混合物落入搅拌系统$再充分搅拌$被搅龙推送至出料口排出%如暂存仓无料$下料位传感器发出信号$喂料停止$延时数秒后计量泵停止$为便于物料充分搅拌$再延时数秒后搅龙才停止8有料时$高料位传感器发出信号$供液开始$液流监测器检测到药液$数秒后再启动喂料#搅龙等其它部件%如物料在搅龙槽体内被堵塞$堵料传感器发出指令$启动防堵保护程序$全部工作部件停止$直至故障排除方能启动%9自动控制系统本机自动控制系统主要由系统硬件和软件两部分组成$控制系统原理图见图)所示%9"!硬件的选型系统R2S机选用@T U VU W@@X K011型$共00点输入#/0点输出%其中S R Y为00’型:/’点输入#/1点输出;8数字量输入扩展模块为U V00/型$&点输入8模拟量输出扩展模块为U V0)0型$0点输出8开关电源为输入/01+0)1Z[S$输出0’Z+5[\S8触摸屏选用@T U VU W@]R/X1[型8触摸屏与R2S之间的通讯采用^@’&5口8三相交流变频器选用@T U VU W@’01型$功率分别为1")X_‘#1"55_‘8液流监测器用S a b)110型压力开关8料位传感器为S c[’/K)11&R d型电容接近开关8堵料传感器为R^2K/11型阻旋物位开关% 9"4软件的设计控制软件的设计主要分为人机交流软件和系统监控软件两部分%/’/第&期胡良龙等e基于R2S的种子包衣机自动控制系统设计与实现 万方数据图!自动控制系统原理图"#$%!&’()*+,#’-#+$.+*/0,()1.#2’#13)0/.+4,/*+,#’’/2,./33#2$565,)*!%7%8人机交流软件该软件采用&9:;<9=>./<//3?>./=&编写@存放于触摸屏内存中@主要实现包衣设备本机参数A喂料器额定容积B转速B计量泵额定流量C B工作信息A变频器频率B加工总量等C B生产参数A生产率B种子容重B种药混比C等的输入B读取和显示@也可调阅相应参考数据D该系统由主菜单A见图E C B本机参数B生产参数B时序设定B校种B校液B参考数据等F幅界面组成@由命令键调入或退出D每幅界面设置数字输入框B信息输出框B按钮命令等@可将相应的命令B数据输送给>G=@也从>G=读出相应参数或状态信息@以此实现人机交流D图E种子包衣机主菜单界面"#$%E92,).0+’)/0*+#2*)24/05))-’/+,).!%7%7系统监控软件该软件A程序框图见图H C是控制系统的核心@在&,)1F I:#’./?J9K编程环境下以梯形图方法在>=机上编制@经调试编辑后下载至>G=机D实现的主要功能如下L8C软件可实现包衣设备各工作部件根据作业中发生的不同状况而有机组合B按序启闭B协调工作D图H系统监控软件程序框图"#$%H"3/M’(+.,/01./$.+*0/.565,)* */2#,/.#2$+2-’/2,./33#2$7E8农业工程学报7N N F年 万方数据!"在软件中设置了可从触摸屏上输入调整的喂料延时#药液从被监测器感知到流至雾化盘的时间"$液泵延时#从喂料停止到抛种盘物料全部落尽的时间"$搅龙延时#喂料停止后%搅龙将全部物料清空的时间"等参数%始终保持种子与药剂同时到达$同步接触和充分混合搅拌后清空%以提高包衣作业质量&’"软件针对故障#如无种$无液$堵料$混配室关闭不严$电源故障$变频器频率设置不合理等"采取报警或最终中止全部工作等方式处理%保障人身及设备安全与作业效果&并针对料位$堵料$液流监测等传感器不同功用编制了相应的软件模块&("该软件更为重要的一个作用是解决种子与种衣剂连续供给与精确控制问题&由于喂料$供药的动力驱动为异步电机%采用变频控制调速后对其输出进行适当的滑差补偿%便可认为喂料$供药的量与变频器工作频率成正比%于是对喂料量$供药量的控制%变为对相应变频器工作频率的控制&因此%只要输入相关参数%软件便可根据如下公式自动进行有关计算%并向相应)*+单元发送数据%通过改变控制变频器工作频率模拟电压的方式%实现对喂料量$供药量的调节&,-./01-2-3-1/-#4喂*5/"67-8#."由式9得到4喂6:’’’’’;7;8*#2;,;3"<=&在)*+单元中%)单元输入数值范围为/>’!///%变频器的最高频率设置值为5/<=%故喂料变频器的工作频率值在向)单元存放前应将4喂-#’!///*5/"%并将其结果圆整后才存放到相应)单元中&经)*+转换后%输出一个在/>./?之间的模拟电压%以控制喂料变频器工作的频率值&@-./’-#4液*5/"67-./0!-A-B#!"由式C得到4液67;A;B*#!///;@"<=%与上述同理%故供药变频器的工作频率值在向)单元存放前应将4液-#’!///*5/"%并将其结果圆整后才存放到相应)单元中&经)*+转换后%输出一个在/>./?之间的模拟电压%以控制供药变频器工作的频率值&式中D4喂EE喂料电机变频器频率%<=F7EE 生产率%G H*I F2EE种子容重%G H*J’F,EE喂料器容积%J K F3EE喂料器在5/<=时转速%L*J M N F 4EE供药电机变频器频率%<=FA EE种药混配比% J K*#.//G H"F@EE计量泵5/<=时流量%K*I F8EE 种子更正系数FBEE种衣剂更正系数&图1为喂料$供药两变频器频率值转换成模拟电压对应数据的一段程序&在启动#O P/Q."或输入修改命令#P!!Q/"后%将喂料$供液的频率值#?R:/$?R:!"写入模拟扩展单元#PR/$PR!"中%后再转换成模拟电压对应的数据#+S R/$+S R!"%从而实现修改变频器工作频率之目的&图1频率值转换的一段程序T M H Q1U L V H L W J X Y Z[M V NV\\L Y]^Y N Z_[L W N X\V L J5"作业中%当U K‘接收到生产率$种子容重$种药混配比等参数的修改命令后%软件即自动运算并修改与之相关的工作数据%从而实现工艺参数的不停机在线修改&1"由于药剂黏度$种子容重的差异会给计量精度带来误差%因此在软件中嵌入了种$液校量模块&启动这一模块%设备就工作在计量校正状态%通过触摸屏将种子$种衣剂预置值与实测量输入%软件将根据二者的比较对误差进行计算%并自动进行误差补偿%一般经一次校正%计量误差可小于!a&b抗干扰措施5c d e5型种子包衣机大多使用在种子加工生产线上%加工线设备众多$电磁环境恶劣$电压不稳定%此外%有些设备还使用较大功率的变频器%会成为严重的干扰源f.!g&如不采取措施%不仅造成U K‘系统程序的失控%而且会使该机的喂料$供药两个变频器时常发生过电压故障而跳闸%影响正常的作业&为此%在硬$软件上都采取了抗干扰措施%主要为D."U K‘机采用独立的开关电源%且其U h点良好接地F!"接触器主触点跨接压敏电阻%消除电源冲击电压与电火花对弱电的影响f.’g F’"在变频器的输入$输出端分别加装电抗器%并且适当调长变频器的斜坡下降时间f.(g F("变频器用屏蔽电缆与电机连结%电缆屏蔽层接地f.5g F5"强电$弱电采用分开走线%间距.5Z J以上F1"各传感器的信号读取后%采用在延时数秒内持续存在方予确认的方式%以剔除偶尔的干扰可能造成的数据误读%故而在软件中设置了无液延时$堵塞延时$有料延时$无料延时等参数项&’(.第:期胡良龙等D基于U K‘的种子包衣机自动控制系统设计与实现 万方数据!结论"#本设备控制系统采用通用$%&技术为平台’以控制软件为手段’实现了对种子与药剂的同步供给和精确控制(各部件有序组合与协调作业(作业质量及安全的保护(参数的优化匹配与在线修改等功能)并以触摸屏为人机交流窗口’便于数据输入调整和读取’实现了人性化操作*+#从软(硬件着手’采取一系列抗干扰措施后’在种子加工线多种负载频繁启闭和工作运行而造成的复杂电磁干扰环境下’本机仍然稳定(可靠地工作*,#+--.年"-月’江苏省农业机械试验鉴定站对本设备进行性能检测’检测结果表明/包衣合格率为001+2’均匀性变异系数为-132’破损率为-1"2’系统设计安全合理*4#.567.型种子包衣设备采用了自动控制与系统结构相结合的一体化设计’并适合于多品种作业’从根本上扭转了传统包衣机电气控制系统粗放简单(机械结构设计不合理(工作协调性差(包衣质量不高的局面’达到了精确包衣和有效提高包衣质量的目的*8参考文献98"9李明’姚东伟’等1我国农作物种子包衣机械应用概况8:91种子’+--.’;"+#/.-<.+18+9张立新’谢志根1.5=><4型种子包衣机的研制8:91石河子大学学报’+--"’;"#/3-<3+18,9乔文德’刘庆国’等1种子包衣机的结构及应用8:91山东农机’+--,’;?#/"+1849唐军红1种子包衣机存在的问题与改进措施8:91石河子科技’+--3’;4#/,?<,@18.9吴文福’赵学笃’等1种子包衣剂定量供给装置8:91农业机械学报’+---’;"#/4+<441839韩豹’申建英’等1种子包衣机的研制8:91农机化研究’+--,’;+#/"."<".+18?9陈寿顺’陈公望1新一代种子包衣机问世8:91农村机械化’"00@’;0#/"+18@9赵德春’赵巍1.5:A <,1-型新型种子包衣机的设计8:91农机化研究’+--3’;,#/0?<0@1809温海江’高春光’等1丹麦&B C5D B E F G B H &&+-型旋转式种子包衣机简介8:91现代化农业’+--+’;""#/4.18"-9沈慎’赵春宇’等1基于%$&+""4的农用种子包衣机嵌入式控制系统设计8:91工业仪表与自动化装置’+--.’;3#/,,<,.18""9吴春生’戈永杰’等1德国$G I J K L&I +<"-型种子包衣机简介8:91现代化农业’+--"’;?#/,?<,@18"+9谢焕雄’高刚华’等1种子丸化机自动控制系统8:91农业机械学报’+--,’;4#/"4?<"4018",9李文雄’陆俭国’等1交流接触器的可靠性技术8:91低压电器’+--.’;@#/,<.18"49陈超苏1$%&控制系统及变频器应用的抗干扰问题8:91世界仪表与自动化’+--.’;"+#/3-<3"18".9刘建国1变频器及常见故障剖析8:91电工技术’+--4’;""#/,4<,.1M N O P Q RS R TU N S V P W S X P Y RY Z S [X Y \S X P ]]Y R X U Y V V P R QO ^O X N \Z Y U O N N T]Y S X N U _S O N TY R‘a bc de f g h i j k h i ’c dl m f n m g k o’p g kp g h i m d g ’q f r d j g f ’sg h ic g f t k d ’u f g he f v f g;wx y z {y |}~!~x "#$%y !&{&’&~()"*|"{#’+&’"x +,~#$x y {-x &{)y ’,{y {!&".)(*|"{#’+&’"~’wx y z {y |+"--"4’/${y x#0_O X U S ]X /E 123745672.567.56824229:;<52=3<492>27;829?1;=92=5;?@8=;>24229:;<5?1AB C <7?56<19@2255D 212294E ;=4229C 4<A 29C =?1A@;92=1<A =?:C 75C =<78=;9C :5?;11I D 2<C 5;@<5?::;15=;77?1A46452@E ;=5D 2:;<52=3<44C ::244E C 776924?A 1291$%&;$=;A =<@@<F 72%;A ?:&;15=;772=#3<45<G 21<45D 2:;15=;7:;=2;E 5D 246452@’<19%&H 5;C :D4:=2213<42@87;629E ;=D C @<17:;@8C 52=?152=<:5?;1?152=E <:21I D 246452@?152A =<529G ?194;E52:D 1?B C 24?1:7C 9?1A8=;A =<@@?1A ’E =2B C 21:6:;1>2=4?;1’7?B C ?9E 7C H@;1?5;=?1A<194214;=4’25:1I D 28=?@<=645=C :5C =2’3;=G ?1A8=?1:?872;E 5D 2:;<52=’4272:5?;1;E :;15=;77?1A46452@D <=93<=2<19@2<4C =24E ;=<15?7I <@7@?1A32=2<74;?15=;9C :291F C @<17:;@8C 52=?152=<:5?;14;E 53<=23<48=;A =<@@29F 65D 24;E 53<=2;E $=;I ;;7J $=;&L 1L 6452@:;15=;77?1A4;E 53<=23<48=;A =<@@29?15D 2E ;=@;E 7<992=9?<A =<@F 6L 528?7C ?:=;J K B L ’=2<7?M ?1AG ?194;E E C 1:5?;14?1:7C 9?1A427E 78=;52:5?;1E ;=3;=G ?1A42:5?;14’<::C =<52B C <15?E ?:<5?;1’<C 5;@<5?::;175=;77?1A<19D C @<1?M 29;82=<5?;11I 245=24C 754;13D 2<542294:;<5?1A4D ;3295D <5:;<5?1A<::285<F ?7?56=2<:D 29001+2’:;2E E ?:?215;E ><=?<5?;1;1:;<5?1A C 1?E ;=@?563<4-132’3D ?:D8=;>295D <55D 24229:;<52=:;C 79?@8=;>2:;<5?1AB C <7?562E E 2:5?>2761N N ^O Y U T O /$%&)4229:;<52=)<C 5;@<5?::;15=;77?1A )5;C :D4:=221)5=<149C :2=)<15?7I <@@?1A44"农业工程学报+--?年 万方数据。
种子裹衣机设计

种子裹衣机设计摘要林木种子的裹衣是种子处理中的一项具有开发前景的新技术。
它是利用专业用的配套设备,按着一定特有的工艺流程和物料配方方案所完成的种子规格化处理技术。
它通过粘合剂将物料包裹在种子的表面,形成一定厚度的衣壳,使种子的外形尺寸达到规格化,就可便于实现机械化作业。
采用种子裹衣加工不可以改善种子形状,还能改善其强度等物理特性,为一些小颗粒的种子,还有不规则的种子创造良好的条件,可以促进它们的生长,同时也能节约成本、保护环境,对保障食品的安全起到了重要的意义。
本文首先介绍了种子裹衣技术的背景、概念、意义、目的、设计要求其裹衣技术的加工原理以及其加工工艺过程和发展展望。
然后在此基础上,对所研发设备的关键零部件进行选型,改良设计。
特别介绍了种子裹衣机的结构以及设计重点,介绍了国内外的研究现状。
并对种子裹衣机的发展前景做了简要叙述。
根据其加工工艺,设计供粉装置,进一步完成裹衣整体设备的方案设计。
优化了供粉装置,使其装置更简便,更轻巧。
将原设备上的带传动转动起风改成了鼓风机供风,使其简单化,而且也增强了供风的稳定性。
为了能准确,简单的控制裹衣锅的倾斜角度,从原有的基础上,在减速箱的外壳和轴承端盖上加了档位器,使其简单的控制裹衣裹的倾斜角度。
我国种子裹衣技术才刚刚起步,还需要进行全方位地提高,这是一个任重道远的过程。
可喜的是国家对这个产业的投入不断增加,种子企业对其的关注不断的提高。
我们相信,通过正确的引导,理论的完善,科研水平的不断进步以及整个种子领域对质量要求的不断提高,在不久的将来,我们会逐渐缩短与发达国家的差距,从而为种子公司带来更大的利润,为农民减少投入、增加收益。
关键词:种子;裹衣技术;优化设计;发展展望Forest Seed Coating Machine DesigningAbstractCloak of tree seeds is a new promising technology in seed treatment. Following specific technological process and material formula solution, it is a normalization technology of seed using appropriative corollary equipment. The material is wrapped outside the surface of the seed by adhesive as a capsid in order to normalize the seed shape and realize mechanical operation. Cloak-treating can not only change the seed shape, but also improve its physical properties, such as strength. It can provide a good environment for seeds of small and irregular shape and boost their growing. At the same time, cloak-treating can reduce the cost and protect the environment, which is meaningful to guarantee food security.This paper introduces the background, concept, meaning, aim of cloak-treating, the processing principle the design requires, the operational process and the development prospect. On this basis, key components of the designed equipment are chosen and improved, e.g. gyration kettle, powder-offer device, heating arrangement, the whole frame, etc. This paper especially introduce the structure and design emphasis of cloak-treating equipment, the research status both at home and abroad as well as the brief description of its development prospect.According to its operational process, powder-offer device is designed to complete the whole equipment. It optimizes the powder-offer device, which is made to be more simple and convenient. Wind is blown from turning to fanning, which is more simple and strengthen the stability of wind- supply. In addition, gear position indicator is added outside the reducer and in the bearing end in order to control the gradient of cloak easier and more accurate.Cloak-treating technology is just starting out in our country and still needs improving in all directions, for which we shoulder heavy responsibilities and have a long way to go. The good news is that China is increasing the investment in this industry and seed enterprises are paying more attention to this technology. We believe we will gradually shorten the gap with developed countries in the coming future through proper guidance, impeccable theory, progressive science technology and elevated requirements for seed quality, thus seed enterprises will gain more profits, and farmers can also cut inputs and increase revenues.Key Words: seed, cloak-treating technology, optimized design, development prospect目录第一章绪论 (1)1.1引言 (1)1.2 国内外种子裹衣机发展现状 (2)1.2.1 国内种子裹衣机现状 (3)1.2.2 国外种子裹衣机现状 (5)1.3 本文研究的目的及其展望 (6)第二章种子裹衣机整体设计方案确定 (9)2.1 种子裹衣机的设计要求及类型 (9)2.1.1 种子裹衣机的设计要求 (9)2.1.2 种子裹衣机的类型及比较 (9)2.1.3 种子裹衣机使用时应注意的问题 (9)2.2 裹衣机整体设计方案确定 (10)2.2.1 裹衣机的工作原理 (10)2.2.2 裹衣机总体结构设计与创新 (10)第三章种子裹衣机结构设计 (11)3.1传动机构设计与选型 (11)3.1.1电机的选型 (11)3.1.2 同步带传动设计 (11)3.1.3减速器的选型 (15)3.2 关键部位选型与设计 (16)3.2.1 回转釜装置选型 (16)3.2.2 供热装置设计 (17)3.2.3 供粉装置设计 (20)3.3 整体机构的设计 (23)第四章结构强度校核 (29)第五章总结和展望 (31)5.1总结 (31)5.2展望 (31)致谢 (32)参考文献 (33)附录 (34)第一章绪论1.1 引言种子是特殊的林业生产资料,是林业科技转化为生产力的载体,对林业生产和农村经济的发展起着至关重要的作用[1]。
播种机的自动化设计及控制优化

播种机的自动化设计及控制优化自动化技术在农业生产中的应用日益广泛。
其中一个重要的应用领域就是播种机的自动化设计及控制优化。
通过自动化技术,可以提高播种的精度、效率和可靠性,从而提升农作物的产量和质量。
本文将从机械设计、感知系统、控制系统等方面探讨播种机的自动化设计及控制优化。
首先,机械设计是自动化播种机设计的关键。
在机械设计方面,需要考虑播种机的结构设计、工作原理、材料选择等因素。
播种机应具备自动化播种所需的功能和特点,例如能够根据播种种类和要求进行不同类型的播种、能够适应不同土壤环境和地形条件、能够自动完成播种深度和行距的调节等。
同时,要保证机械的稳定性、可靠性和耐用性,以确保持续的播种效果。
其次,感知系统的设计对播种机的自动化起着重要作用。
感知系统主要包括传感器、监测系统和识别系统。
传感器可以用来感知播种机与环境之间的关系,例如土壤水分、土壤肥力、气候环境等因素。
监测系统可以实时监测播种机的运行状态,例如播种速度、震动、温度等指标。
识别系统可以用来识别播种目标,例如播种行、播种孔、种子等。
通过感知系统的数据采集和处理,可以为自动控制系统提供准确的输入信息,从而实现精确的控制和调节。
最后,控制系统的优化是实现播种机自动化的关键。
控制系统主要包括控制策略、控制算法和控制装置。
控制策略是指根据播种机的工作要求和目标,在不同时间和场景下选择合适的控制方式和方法。
控制算法是指根据播种机的动态特性和外部环境变化,设计合适的控制算法来实现自动化控制和调节。
控制装置是指实现控制算法的硬件设备,例如传动装置、执行器、计算机控制系统等。
通过优化控制系统的设计和实现,可以提高播种机的自动化水平,实现自动播种的目标。
综上所述,播种机的自动化设计及控制优化涉及机械设计、感知系统和控制系统等多个方面。
通过合理的设计和优化,可以实现播种机的自动化播种,提高生产效率和农作物的产量和质量。
然而,在实际应用中,还需要考虑成本、可行性和适用性等因素,以确保自动化技术的有效应用和推广。
自动控制论文题目选题参考
自动控制论文题目一、最新自动控制论文选题参考1、基于PLC的种子包衣机自动控制系统设计与实现2、无线数据传输在节水灌溉自动控制中的应用3、自动控制在污水处理中的应用4、基于SCADA的无功电压自动控制系统5、高炉热风炉全自动控制专家系统6、智能交通系统及其车辆自动控制技术7、智能温室自动控制系统的设计与应用8、基于PLC的煤矿主排水泵自动控制系统设计9、列车运行自动控制(ATO)算法的研究10、自动变速器(十一)——变速器的自动控制系统(下)11、自动控制技术——汽车动力学稳定性控制系统研究现状及发展趋势12、循环流化床锅炉热工自动控制系统13、温室节点式渗灌自动控制系统设计与实现14、SBR法计算机自动控制系统的研究15、主动式自动控制烤房研制与试验报告16、盾构机自动控制技术现状与展望17、自动控制中的矩阵理论18、高炉热风炉全自动控制专家系统19、自动变速器(九)——变速器的自动控制系统(上)20、楼宇自动控制网络通信协议BACnet实现模型的研究二、自动控制论文题目大全1、冷连轧板形自动控制2、冷连轧机张力自动控制系统3、复卷机张力自动控制系统4、"自动控制原理"课程讲授的几个要点5、变电站电压无功综合自动控制的实现与探讨6、自动变速器(十)——变速器的自动控制系统(中)7、自动控制原理立体化教学新体系的探索与实践8、论间歇式活性污泥法的自动控制9、用于水果实时分级系统的同步跟踪自动控制装置10、《自动控制原理》课程的教学改革与实践11、DCS自动控制系统软件体系的设计与实现12、Proteus软件在自动控制系统仿真中的应用13、烧结生产自动控制新技术(上)14、电力传动与自动控制系统15、活性污泥法污水处理过程自动控制的研究现状16、模糊参数自整定PID控制技术在推土机自动控制系统中的应用17、烧结生产自动控制新技术(下)18、波浪能独立稳定发电自动控制系统19、鱼雷自动控制系统20、自动控制原理课程体系结构和教学方法探讨三、热门自动控制专业论文题目推荐1、基于组态王的锅炉自动控制系统2、火电厂各机组间负荷调度实时优化自动控制系统的研究3、温室小气候要素的计算机自动控制效果分析4、Matlab在自动控制原理实验中的应用5、倒立摆与自动控制技术研究6、基于PLC和力控组态软件的沼气生产自动控制系统7、基于激光导航的果园拖拉机自动控制系统8、灌溉明渠自动控制设计方法研究9、废水处理中pH值的PLC自动控制系统10、污水处理厂溶解氧自动控制系统的运行优化11、联合收割机自动控制研究现状与展望12、柑橘园水肥一体化滴灌自动控制装置的研制13、农业车辆导航系统中自动控制技术的研究进展14、下游常水位水力自动控制渠道运行动态过程及数学模型的研究15、智能型变电站电压、无功综合自动控制装置16、现代电网自动控制系统及其应用17、基于专家智能的循环流化床锅炉自动控制系统18、大型变压器风冷却系统的自动控制19、MATLAB在自动控制理论实验中的应用20、智能大功率电弧炉自动控制系统四、关于自动控制毕业论文题目1、基于ANN的变电站电压和无功综合自动控制2、变电站电压无功综合自动控制问题探讨3、温室计算机分布式自动控制系统的开发4、电压无功自动控制软件及其应用5、汽车离合器局部恒转速起步自动控制研究6、基于全自动控制显微镜的自动聚焦算法研究7、节水灌溉自动控制系统的研究8、自动控制理论发展综述9、遗传算法在自动控制领域中的应用综述10、自动控制技术——间歇过程的统计建模与在线监测11、自动垂直钻井工具的设计及自动控制方法12、冷连轧厚度自动控制13、循环流化床锅炉热工自动控制系统与展望14、稀土串级萃取分离过程的自动控制系统15、稀土萃取分离过程自动控制研究现状及发展趋势16、自动控制原理教学改革与实践17、MATLAB语言与自动控制系统设计18、变风量空调系统的自动控制19、蒸发冷却空调系统自动控制方案的探讨20、温室的自动控制设计及实现五、比较好写的自动控制论文题目1、烤烟烘烤智能化自动控制系统的设计与应用研究2、灌溉施肥自动控制系统的研究与开发3、工厂化蔬菜生产成套装备及自动控制系统的研究4、基于图像处理的单张纸胶印机对角线套准及自动控制系统5、基于HMI和PLC的立体车库自动控制系统6、自动控制在污水处理中的应用7、混凝剂加注量的自动控制新方法8、自动控制原理双语教学改革的实践与探讨9、联合收获机梳脱台高度自动控制系统的设计10、基于太阳能的微灌系统恒压供水自动控制装置研制11、基于LabVIEW的自动控制原理虚拟实验系统12、"自动控制原理"课程的教学研究与实践13、计算机自动控制的条件性位置偏爱实验系统14、“水迷宫”自动控制仪的研制及在神经药理研究中的应用15、建立开放式自动控制实验中心的探讨16、从IFAC′96世界大会看自动控制发展的若干动向17、废水中和处理pH值自动控制系统18、"自动控制原理"课程的探究性教学实践19、梳脱式联合收获机脱粒输送装置自动控制系统20、工厂化水产养殖水体的pH值在线自动控制系统。
农业机械自动化生产系统设计与实现
农业机械自动化生产系统设计与实现随着科技的不断发展,农业机械化生产已成为现代农业的重要组成部分。
而自动化生产系统的出现,更是为农业机械化生产带来了巨大的提升。
设计和实现一个高效稳定的农业机械自动化生产系统,既可以提高农业生产效率,也可以降低人为操作错误带来的生产成本。
那么,该如何进行农业机械自动化生产系统设计和实现呢?1. 设计方案在农业机械自动化生产系统的设计中,需要考虑农业生产特点和实际需求,制定出相应的系统设计方案。
首先,应该确定自动化生产系统主要的技术指标和功能需求。
这包括生产效率、自动化程度、可靠性、安全性等方面。
其次,根据具体的农产品生产要求,分析生产过程中的问题和瓶颈,并考虑如何通过自动化生产系统来解决这些问题。
2. 硬件系统农业机械自动化生产系统的硬件系统包括传感器、执行器、控制器等各种设备。
其中,传感器是自动化生产系统的最基本组成部分。
传感器可以感知到物理量和状态信息,并将其转化为电信号输出,从而实现对农业生产过程的监测和控制。
执行器则是在控制信号的指引下,将农业机械实际操作所需的力和动作执行出来。
而控制器则是控制整个自动化生产系统的中枢,可以自动感应、控制和校准各种情况,根据各种控制算法实现农业生产全自动化。
3. 软件系统农业机械自动化生产系统的软件系统是控制器的核心组成部分。
软件系统应该为控制器提供控制算法、工作模式和管理界面。
可以通过编程实现自动化机械的驱动和控制。
同时软件系统应该有高效的控制算法,能够快速响应农业生产中出现的各种问题,如灌溉、施肥、除草等等。
4. 数据传输和存储在自动化生产系统的实际操作中,需要将各种物理数据、状态信息和控制信号及时和准确地传输到各个设备中,保障各个设备之间的协同合作。
因此,自动化生产系统中需要有可靠的数据传输环节。
数据的传输可以采用各种通讯协议,例如ModBus、CAN、以太网等等。
同时,对于系统运行数据的存储和管理,还需要设计合理的数据库结构和存储方式,并进行定期的数据备份和恢复。
玉米播种机智能控制系统设计与试验
报警电路模块是玉米播种机智能控制系统中
重要的一部分,用于监测和报警关键事件或异常情
况。 电路设计关键技术如表 3 所示。
3 自动控制算法的实现
本文使用 Python 的 matplotlib 库编写控制算法
程序,结果在控制显示台进行显示,控制算法控制
逻辑和操作代码如下,“ record_state” 用于记录每个
35 cm,间距合格率、漏播率和重播率的控制是确保
播种精确性和效率的关键因素。 合格的间距合格
率表示绝大多数种子都被按照所需间距播种,而较
低的漏播率和重播率则表明减少了种子的浪费和
不均匀分布。 这些要求有助于提高产量、降低生产
成本,并促进玉米种植的可持续性。
1. 2 控制方案
针对玉米播种机控制要求,本文采用基于 PLC
def start_motor( self, speed) :
print( f" 启动电机,速度:{ speed} " )
self. motor_speed = speed
种子流量 等 信 息, 这 些 数 据 用 于 实 时 监 测 播 种 过
程,并作为基础数据用于后续的控制决策;控制算
指标
合格参数
法用于分析传感器数据、计算目标参数( 如株距、振
最佳间距 / cm
30 ~ 35
幅等) 并制定控制策略,同时考虑土壤条件、作物需
间距合格率 / %
≥ 95
漏播率 / %
≤5
0 引言
玉米作为世界上重要的粮食作物之一,是一种
多用途的作物,不仅为人类提供主要食物来源,还
用于饲料、工业原料和生物能源的生产 [1 - 3] 。 玉米
在全球粮食供应中占有显著地位,在农业经济的可
基于PLC的种子包衣机自动控制系统设计与实现_胡良龙
第23卷第8期2007年8月农业工程学报T r ansactions of the CSA E V ol.23 N o.8A ug. 2007基于PLC 的种子包衣机自动控制系统设计与实现胡良龙,胡志超※,高刚华,计福来,王海鸥,田立佳(农业部南京农业机械化研究所,南京210014)摘 要:为提高种子包衣质量,满足现代农业生产用种需求,研发了5BY -5型新一代种子包衣设备,并设计了以PL C 为控制核心,液晶触摸屏为人机交流窗口,集编程、变频、液流监测、传感器等技术为一体的自动化控制系统。
介绍了设备的主要结构、工作原理、控制系统硬件选型及抗干扰措施。
采用Pr o T o ol/P ro CS 编制人机交流软件,在Step 7-M icr o/WIN 环境下采用梯形图方法编制系统监控软件,实现包衣作业的部件保护、精确计量、自动控制和人性化操作。
检测结果表明,包衣合格率为99.2%,均匀性变异系数为0.6%,证明该设备能有效提高包衣质量。
关键词:P L C ;种子包衣机;自动控制;触摸屏;变频器;抗干扰中图分类号:T P273.5;T Q 460.5 文献标识码:A 文章编号:1002-6819(2007)8-0140-05胡良龙,胡志超,高刚华,等.基于P LC 的种子包衣机自动控制系统设计与实现[J ].农业工程学报,2007,23(8):140-144.Hu L ianglo ng ,Hu Zhichao ,G ao Ga ng hua ,et al.Desig n and rea lization of aut omatic contr olling system for seed co ater based on P L C[J].T ransactio ns o f the CSA E,2007,23(8):140-144.(in Chinese w it h Eng lish abstr act)收稿日期:2006-08-07 修订日期:2007-03-06基金项目:国家“十五”科技攻关项目(2004BA524B04)作者简介:胡良龙(1973-):男,安徽池州贵池人,工程师,主要从事机电一体化技术及农产品加工技术装备研究。
基于变频器的种子包衣机电气控制系统
·57·大部分农作物都是从种子形态慢慢生长的,因此种子的质量直接影响农作物的收获。
而种子加工就是种子质量提高的重要手段之一,只有种子的质量提高了,才能促进粮食的增产。
据调查得知,种子经过加工处理后,长出的苗不仅整齐强壮,而且数量还多,平均单产可提高5%-10%,因此越发受到各个国家的重视。
种子包衣技术能够有效提高种子的质量,促进种子的生长,有效驱避害虫对已播种子及幼苗的侵害,并且对环境的污染较小,很符合当前农业绿色发展的战略。
种子包衣是一种以种子为载体,将按照一定的比例混合而成的含有农药、微肥和植物生长调节剂等成分的种衣剂,均匀包敷到种子外层,从而使种子得到再加工,提高种子质量的一项加工处理技术。
种子包衣的方式有两种:一种是人工包衣,另一种便是机械包衣。
人工包衣,简而言之,就是工人或农民自己动手,将种子和种衣剂装进较小的盒子或盆中,用手翻动搅拌是两者混合在一起,但这样的操作效率太低,并且人的皮肤也很容易受到种衣剂的毒害,因此,不适宜大面积的种植。
而机械包衣主要是机器代替人工操作,利用独特的机器部件将种衣剂和种子完成混合,如此一来就节约了人力资源,减少了人工使用,大大提高了操作效率,既做到了不伤人,也尽量做到了不污染环境,在当前被普遍采用。
目前,我国种子包衣机虽然发展很快,但起步却较晚,因此相关的设计思想有限,技术水平还无法达到国际一流水准,导致国内生产的种子包衣机自动化程度不高,每次作业时包衣剂损失量大,最后效率却不高,造成了双重资源浪费, 所以,国内种子包衣机的推广应用一直没有太大的进展。
但是,归根结底,想要提高种子包衣机的整体性能,关键就在于控制系统的升级。
所以,本文着重研究了基于变频器的种子包衣机电气控制系统。
1.总体设计概述电气控制系统以5B-5型种子包衣机为安装平台,这型种子包衣机采用甩盘雾化式,对于大豆和小麦等作物的种子加工具有极高的作业效率,生产能力可达到6t/h。
播种机设计及自动控制技术研究
播种机设计及自动控制技术研究本文将针对播种机的设计及自动控制技术进行研究,为农业生产提供高效、自动化的解决方案。
播种机是农机具中的重要设备,其设计和自动控制技术的研究对于提高农作物的播种效率和质量具有重要意义。
在本文中,我们将重点讨论播种机的结构设计和自动控制技术的研究进展。
首先,对于播种机的结构设计,我们需要考虑以下几个关键因素:播种深度、行距、保持稳定、适应不同土壤类型等。
播种深度的控制对于种子的生长影响重大,因此在设计中要充分考虑播种深度的可调节性,并确保在播种过程中能够保持一致。
行距的控制对于后续作物的管理和收割非常重要,因此播种机设计中应提供不同行距的设置选项。
保持稳定是确保播种质量的关键因素之一,因此在设计中应考虑重心平衡和减震装置。
此外,播种机应适应不同土壤类型,如砂壤土、黏土和粘土等。
其次,关于播种机的自动控制技术研究,我们可以考虑以下几个方面:无人驾驶技术、传感器技术和数据分析技术。
无人驾驶技术可以实现播种机的自主导航和路径规划,大大提高作业效率和准确性。
传感器技术可以实时感知土壤湿度、温度和营养情况等参数,从而调整播种机的工作状态和播种量。
数据分析技术可以对播种过程中所获得的数据进行处理和分析,帮助农户进行决策和优化管理。
当然,为实现以上设计和技术要求,我们需要从材料选择、动力源和控制系统等方面进行综合考虑。
材料选择应注重耐用性和可维修性,并且要符合农业机械的安全要求。
动力源的选择可以考虑内燃机或电动机等,需要根据播种机的尺寸和作业要求进行合理配置。
控制系统则需要设计和开发相应的软硬件,确保播种机的稳定性和自动化程度。
总之,播种机的设计及自动控制技术的研究对于提高农业生产效率和质量具有重要意义。
通过合理的结构设计和自动控制技术的应用,可以实现播种的高效、精准和自动化。
未来的发展方向包括进一步提升播种机的智能化程度、优化播种工艺和集成农业信息技术等。
相信随着科技的进一步发展,我们将能够设计出更加智能和高效的播种机,为农业带来更大的发展和利益。
玉米播种机械的智能化设计与实现
玉米播种机械的智能化设计与实现目录1. 内容概览 (2)1.1 研究背景 (2)1.2 研究目的和意义 (3)1.3 文献综述 (4)2. 智能化播种机械的概述 (6)2.1 播种机械的发展历史 (7)2.2 智能化播种机械的定义和特点 (8)2.3 智能化播种机械的技术优势 (9)3. 玉米播种机械的自动化与智能化技术 (10)3.1 种子供给系统的自动化 (12)3.2 播种深度调节的智能化 (13)3.3 故障诊断与预测维护 (14)3.4 数据采集与远程监控 (16)4. 玉米播种机械的智能化设计思路 (17)4.1 设计目标与关键技术 (18)4.2 系统的功能模块划分 (19)4.3 机械结构与电子控制解决方案 (21)5. 智能化播种机械的实现方法 (22)5.1 控制系统硬件选型 (24)5.2 传感器与执行器选择 (25)5.3 数据处理与算法实现 (26)5.4 遥感与GPS辅助导航 (28)6. 智能化播种机械的试验与数据分析 (29)6.1 实验设计 (30)6.2 实验结果 (31)6.3 数据分析与性能评估 (32)7. 结论和未来展望 (33)7.1 智能化播种机械的实际应用效果 (35)7.2 展望与未来的研究方向 (36)1. 内容概览本文档旨在介绍玉米播种机械的智能化设计与实现,首先,我们将对当前玉米播种机械的现状进行分析,以便了解其存在的问题和改进空间。
接着,我们将详细介绍智能化设计的基本原则和方法,以及在玉米播种机械中应用这些原则和方法的具体步骤。
我们将通过实际案例展示智能化设计的成果,并对未来发展趋势进行展望。
本文档共分为五个部分:第一部分为引言,简要介绍玉米播种机械的重要性和智能化设计的意义;第二部分为现状分析,对现有玉米播种机械的技术水平、性能和使用效果进行评价;第三部分为智能化设计原则与方法,阐述智能化设计的基本原理和在玉米播种机械中的应用;第四部分为智能化设计实例,通过具体案例展示智能化设计的实际成果;第五部分为结论与展望,总结全文内容并对未来发展趋势进行预测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第!"卷第#期!$$%年#月农业工程学报&’()*(+,-.)*./,0123456.78!"9.8#4:;8!$$%基于<=2的种子包衣机自动控制系统设计与实现胡良龙>胡志超>高刚华>计福来>王海鸥>田立佳@农业部南京农业机械化研究所>南京!A $$A B C摘要D 为提高种子包衣质量>满足现代农业生产用种需求>研发了E F G H E 型新一代种子包衣设备>并设计了以<=2为控制核心>液晶触摸屏为人机交流窗口>集编程I 变频I 液流监测I 传感器等技术为一体的自动化控制系统J 介绍了设备的主要结构I 工作原理I 控制系统硬件选型及抗干扰措施J 采用<’.&..7K <’.23编制人机交流软件>在3,1L %H M-+’.K NO 9环境下采用梯形图方法编制系统监控软件>实现包衣作业的部件保护I 精确计量I 自动控制和人性化操作J 检测结果表明>包衣合格率为P P 8!Q>均匀性变异系数为$8R Q>证明该设备能有效提高包衣质量J 关键词D <=2S 种子包衣机S 自动控制S 触摸屏S 变频器S 抗干扰中图分类号D &<!%"8E S &T BR $8E 文献标识码D 4文章编号D A $$!H R #A P @!$$%C #H $A B $H $E胡良龙>胡志超>高刚华>等8基于<=2的种子包衣机自动控制系统设计与实现U V W 8农业工程学报>!$$%>!"@#C D A B $XA B B 8Y :=-();7.);>Y :Z 0-+0(.>[(.[();0:(>1,(78\1*-;)()]’1(7-^(,-.)./(:,._(,-++.),’.77-);*‘*,1_/.’*11]+.(,1’a (*1].)<=2U V W 8&’()*(+,-.)*./,012345>!$$%>!"@#C D A B $XA B B 8@-)20-)1*1b -,05);7-*0(a *,’(+,C 收稿日期D !$$R H $#H $%修订日期D !$$%H $"H $R 基金项目D 国家c 十五d 科技攻关项目@!$$B F 4E !B F$B C 作者简介D 胡良龙@A P %"XC D 男>安徽池州贵池人>工程师>主要从事机电一体化技术及农产品加工技术装备研究J 南京市玄武区中山门外柳营A $$号农业部南京农业机械化研究所>!A $$A B J5_(-7D )/^0.);^-e *.0:8+._>)/^0.);^-eA R "8+._通讯作者D胡志超@A P R "XC >男>陕西西安蓝田人>研究员>主要从事农产品加工及种子加工技术与装备的研究J 南京市玄武区中山门外柳营A $$号农业部南京农业机械化研究所>!A $$A B J5_(-7D ^+0:"R P eA R "8+._f 引言种子包衣是以种子为载体>以包衣设备为手段>将含有农药I 肥料I 生长调节剂等有效成分的种衣剂@通常为胶悬液C 按一定比例均匀有效地包敷到种子表面的加工处理技术U A WJ国内种子包衣设备大多吸纳美国I 意大利I 德国等早期技术进行研制的>与国外先进水平存有较大差距J 采用杠杆翻斗原理控制种药混配的包衣机>其在结构设计I 种药供给方式I 计量精度控制等方面均存有较大不足>最好的包衣合格率也不足P !QS !$世纪P $年代初>少数厂家采用定量泵供药I 对开门等方式给种进行包衣作业>虽在结构原理上有所改善>但可调控性差I 精度低>包衣质量仍不理想U !X %W J 而且国内包衣设备的电控系统简单粗放>无法对种药计量进行精确控制>也不能使各部件协调有序工作>严重制约着种子包衣质量的提高>难以满足现代农业生产对种子包衣质量高标准的要求U #X A $WJ依托国家科技攻关项目>在比较I 借鉴以德国<5&g h 3公司等为代表的当今国际最先进的种子包衣技术及控制技术的基础上>自主创新研究开发了E F G H E 型新一代种子包衣设备及其基于<=2的自动化控制系统>该设备可用于小麦I 大麦I 玉米I 甜菜等多种农作物种子的包衣加工处理Ji 主要结构E F G HE 型种子包衣机由种子定量供给装置I 种衣剂定量供给系统I 种子与种衣剂混配系统I 回转清淤机构I 搅拌推送系统I 电气控制系统等组成>其结构见图A J图A E F G HE 型种子包衣机结构简图j -;8A 3,’:+,:’(7*+01_(,-+./EFGH E *11]+.(,1’kk k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k k $BA 万方数据!"!种子定量供给装置主要由叶斗式喂料器#减速机#变频器#料位传感器等组成$主要控制加工时的连续精确喂料$并监测暂存仓内物料状态%叶斗喂料器为&片叶片对称结构$采用变频无级调速$转速范围为’()&*+,-.$理论上额定每转容积可达//011,2$充满系数可选1"3%!"4种衣剂定量供给系统主要由贮药桶#柱塞式计量泵#变频器#稳压罐#液体监测器#校液口及管道等组成%变频器控制计量泵从贮药桶精确取液$经稳压罐后流经液体监测器$送至混配室或手动校液口%计量泵额定流量0512+6$采用变频无级调速$泵速范围为/1(73*+,-.8液体监测器用于监测工作过程中药液的有无%!"9种子与种衣剂混配系统主要由混配室#甩盘电机#同步齿形带#抛种甩盘#进液管#药液雾化盘等组成:见图0;$该系统关键部件采用了高速离心同步上下双甩盘结构$转速为/’11*+,-.%种子从进种口落到旋转的抛种甩盘上被均匀抛向四周8药液雾化盘为波纹形结构$种衣剂经进液管流到下甩盘时在离心力作用下被雾化$与其上端均匀散落种子充分接触#混合$有效的提高了包衣均匀度<//=%图0种子与种衣剂混配系统>-?"0@A*B C A B*D E F C6G,D A-C H I F G G J K C H D A-.?D?G.A,-L-.?F M F A G,!"N回转清淤机构主要有清理电机#毛刷#尼龙齿圈组成%尼龙齿圈在清理电机驱动下$带动毛刷将黏附在种子混配室斜壁上的种子及药液刮除$同时也起到一定搅拌作用%!"O搅拌推送系统该系统主要有减速机#搅龙机构#堵料传感器等组成$搅龙轴上安装以螺旋角’5P排列的拨锤和月牙式叶片%种药混合物被搅龙推送$在槽体内进一步的接触#搓擦$使种衣剂在种子表面均匀包敷$最后将物料排出机外%在搅龙出料口处设有阻旋式传感器$用于监测槽体内物料堆堵状况%!"Q电气控制系统本设备电气控制系统是以工业上通用的R2S:可编程序控制器;为控制核心$以液晶触摸屏为人机交流窗口$并结合相应软件#变频装置#液流监测器#料位传感器#堵料传感器及相应的执行元器件对包衣全程作业进行自动控制%4工作原理首先从触摸屏输入生产率#种子容重#种药混配比等参数$R2S接收后$由程序计算出喂料器和计量泵的工作频率$即喂种量和供药量%自动运行时$种衣剂被计量泵从贮液桶吸出$再由泵挤压推送流经稳压罐到液流监测器$后进入混配室内药液雾化盘被离心雾化8液流监测器检测到药液后$系统自动启动其它工作部件8经延时$喂料器开始喂料$种子落入混配室内抛种甩盘被均匀抛撒落下$与已雾化的种衣剂充分接触#混合#下落8黏附在清淤室斜壁上的种药混合物被毛刷刮除落下8种药混合物落入搅拌系统$再充分搅拌$被搅龙推送至出料口排出%如暂存仓无料$下料位传感器发出信号$喂料停止$延时数秒后计量泵停止$为便于物料充分搅拌$再延时数秒后搅龙才停止8有料时$高料位传感器发出信号$供液开始$液流监测器检测到药液$数秒后再启动喂料#搅龙等其它部件%如物料在搅龙槽体内被堵塞$堵料传感器发出指令$启动防堵保护程序$全部工作部件停止$直至故障排除方能启动%9自动控制系统本机自动控制系统主要由系统硬件和软件两部分组成$控制系统原理图见图)所示%9"!硬件的选型系统R2S机选用@T U VU W@@X K011型$共00点输入#/0点输出%其中S R Y为00’型:/’点输入#/1点输出;8数字量输入扩展模块为U V00/型$&点输入8模拟量输出扩展模块为U V0)0型$0点输出8开关电源为输入/01+0)1Z[S$输出0’Z+5[\S8触摸屏选用@T U VU W@]R/X1[型8触摸屏与R2S之间的通讯采用^@’&5口8三相交流变频器选用@T U VU W@’01型$功率分别为1")X_‘#1"55_‘8液流监测器用S a b)110型压力开关8料位传感器为S c[’/K)11&R d型电容接近开关8堵料传感器为R^2K/11型阻旋物位开关% 9"4软件的设计控制软件的设计主要分为人机交流软件和系统监控软件两部分%/’/第&期胡良龙等e基于R2S的种子包衣机自动控制系统设计与实现 万方数据图!自动控制系统原理图"#$%!&’()*+,#’-#+$.+*/0,()1.#2’#13)0/.+4,/*+,#’’/2,./33#2$565,)*!%7%8人机交流软件该软件采用&9:;<9=>./<//3?>./=&编写@存放于触摸屏内存中@主要实现包衣设备本机参数A 喂料器额定容积B 转速B 计量泵额定流量C B 工作信息A 变频器频率B 加工总量等C B 生产参数A 生产率B 种子容重B 种药混比C 等的输入B 读取和显示@也可调阅相应参考数据D 该系统由主菜单A 见图E C B 本机参数B 生产参数B 时序设定B 校种B 校液B 参考数据等F 幅界面组成@由命令键调入或退出D 每幅界面设置数字输入框B 信息输出框B 按钮命令等@可将相应的命令B 数据输送给>G =@也从>G =读出相应参数或状态信息@以此实现人机交流D图E 种子包衣机主菜单界面"#$%E 92,).0+’)/0*+#2*)24/05))-’/+,).!%7%7系统监控软件该软件A 程序框图见图H C 是控制系统的核心@在&,)1F I :#’./?J9K 编程环境下以梯形图方法在>=机上编制@经调试编辑后下载至>G =机D 实现的主要功能如下L8C 软件可实现包衣设备各工作部件根据作业中发生的不同状况而有机组合B 按序启闭B 协调工作D图H 系统监控软件程序框图"#$%H "3/M ’(+.,/01./$.+*0/.565,)**/2#,/.#2$+2-’/2,./33#2$7E 8农业工程学报7N N F年万方数据!"在软件中设置了可从触摸屏上输入调整的喂料延时#药液从被监测器感知到流至雾化盘的时间"$液泵延时#从喂料停止到抛种盘物料全部落尽的时间"$搅龙延时#喂料停止后%搅龙将全部物料清空的时间"等参数%始终保持种子与药剂同时到达$同步接触和充分混合搅拌后清空%以提高包衣作业质量&’"软件针对故障#如无种$无液$堵料$混配室关闭不严$电源故障$变频器频率设置不合理等"采取报警或最终中止全部工作等方式处理%保障人身及设备安全与作业效果&并针对料位$堵料$液流监测等传感器不同功用编制了相应的软件模块&("该软件更为重要的一个作用是解决种子与种衣剂连续供给与精确控制问题&由于喂料$供药的动力驱动为异步电机%采用变频控制调速后对其输出进行适当的滑差补偿%便可认为喂料$供药的量与变频器工作频率成正比%于是对喂料量$供药量的控制%变为对相应变频器工作频率的控制&因此%只要输入相关参数%软件便可根据如下公式自动进行有关计算%并向相应)*+单元发送数据%通过改变控制变频器工作频率模拟电压的方式%实现对喂料量$供药量的调节&,-./01-2-3-1/-#4喂*5/"67-8#."由式9得到4喂6:’’’’’;7;8*#2;,;3"<=&在)*+单元中%)单元输入数值范围为/>’!///%变频器的最高频率设置值为5/<=%故喂料变频器的工作频率值在向)单元存放前应将4喂-#’!///*5/"%并将其结果圆整后才存放到相应)单元中&经)*+转换后%输出一个在/>./?之间的模拟电压%以控制喂料变频器工作的频率值&@-./’-#4液*5/"67-./0!-A-B#!"由式C得到4液67;A;B*#!///;@"<=%与上述同理%故供药变频器的工作频率值在向)单元存放前应将4液-#’!///*5/"%并将其结果圆整后才存放到相应)单元中&经)*+转换后%输出一个在/>./?之间的模拟电压%以控制供药变频器工作的频率值&式中D4喂EE喂料电机变频器频率%<=F7EE 生产率%G H*I F2EE种子容重%G H*J’F,EE喂料器容积%J K F3EE喂料器在5/<=时转速%L*J M N F 4EE供药电机变频器频率%<=FA EE种药混配比% J K*#.//G H"F@EE计量泵5/<=时流量%K*I F8EE 种子更正系数FBEE种衣剂更正系数&图1为喂料$供药两变频器频率值转换成模拟电压对应数据的一段程序&在启动#O P/Q."或输入修改命令#P!!Q/"后%将喂料$供液的频率值#?R:/$?R:!"写入模拟扩展单元#PR/$PR!"中%后再转换成模拟电压对应的数据#+S R/$+S R!"%从而实现修改变频器工作频率之目的&图1频率值转换的一段程序T M H Q1U L V H L W J X Y Z[M V NV\\L Y]^Y N Z_[L W N X\V L J5"作业中%当U K‘接收到生产率$种子容重$种药混配比等参数的修改命令后%软件即自动运算并修改与之相关的工作数据%从而实现工艺参数的不停机在线修改&1"由于药剂黏度$种子容重的差异会给计量精度带来误差%因此在软件中嵌入了种$液校量模块&启动这一模块%设备就工作在计量校正状态%通过触摸屏将种子$种衣剂预置值与实测量输入%软件将根据二者的比较对误差进行计算%并自动进行误差补偿%一般经一次校正%计量误差可小于!a&b抗干扰措施5c d e5型种子包衣机大多使用在种子加工生产线上%加工线设备众多$电磁环境恶劣$电压不稳定%此外%有些设备还使用较大功率的变频器%会成为严重的干扰源f.!g&如不采取措施%不仅造成U K‘系统程序的失控%而且会使该机的喂料$供药两个变频器时常发生过电压故障而跳闸%影响正常的作业&为此%在硬$软件上都采取了抗干扰措施%主要为D."U K‘机采用独立的开关电源%且其U h点良好接地F!"接触器主触点跨接压敏电阻%消除电源冲击电压与电火花对弱电的影响f.’g F’"在变频器的输入$输出端分别加装电抗器%并且适当调长变频器的斜坡下降时间f.(g F("变频器用屏蔽电缆与电机连结%电缆屏蔽层接地f.5g F5"强电$弱电采用分开走线%间距.5Z J以上F1"各传感器的信号读取后%采用在延时数秒内持续存在方予确认的方式%以剔除偶尔的干扰可能造成的数据误读%故而在软件中设置了无液延时$堵塞延时$有料延时$无料延时等参数项&’(.第:期胡良龙等D基于U K‘的种子包衣机自动控制系统设计与实现 万方数据!结论"#本设备控制系统采用通用$%&技术为平台’以控制软件为手段’实现了对种子与药剂的同步供给和精确控制(各部件有序组合与协调作业(作业质量及安全的保护(参数的优化匹配与在线修改等功能)并以触摸屏为人机交流窗口’便于数据输入调整和读取’实现了人性化操作*+#从软(硬件着手’采取一系列抗干扰措施后’在种子加工线多种负载频繁启闭和工作运行而造成的复杂电磁干扰环境下’本机仍然稳定(可靠地工作*,#+--.年"-月’江苏省农业机械试验鉴定站对本设备进行性能检测’检测结果表明/包衣合格率为001+2’均匀性变异系数为-132’破损率为-1"2’系统设计安全合理*4#.567.型种子包衣设备采用了自动控制与系统结构相结合的一体化设计’并适合于多品种作业’从根本上扭转了传统包衣机电气控制系统粗放简单(机械结构设计不合理(工作协调性差(包衣质量不高的局面’达到了精确包衣和有效提高包衣质量的目的*8参考文献98"9李明’姚东伟’等1我国农作物种子包衣机械应用概况8:91种子’+--.’;"+#/.-<.+18+9张立新’谢志根1.5=><4型种子包衣机的研制8:91石河子大学学报’+--"’;"#/3-<3+18,9乔文德’刘庆国’等1种子包衣机的结构及应用8:91山东农机’+--,’;?#/"+1849唐军红1种子包衣机存在的问题与改进措施8:91石河子科技’+--3’;4#/,?<,@18.9吴文福’赵学笃’等1种子包衣剂定量供给装置8:91农业机械学报’+---’;"#/4+<441839韩豹’申建英’等1种子包衣机的研制8:91农机化研究’+--,’;+#/"."<".+18?9陈寿顺’陈公望1新一代种子包衣机问世8:91农村机械化’"00@’;0#/"+18@9赵德春’赵巍1.5:A <,1-型新型种子包衣机的设计8:91农机化研究’+--3’;,#/0?<0@1809温海江’高春光’等1丹麦&B C5D B E F G B H &&+-型旋转式种子包衣机简介8:91现代化农业’+--+’;""#/4.18"-9沈慎’赵春宇’等1基于%$&+""4的农用种子包衣机嵌入式控制系统设计8:91工业仪表与自动化装置’+--.’;3#/,,<,.18""9吴春生’戈永杰’等1德国$G I J K L&I +<"-型种子包衣机简介8:91现代化农业’+--"’;?#/,?<,@18"+9谢焕雄’高刚华’等1种子丸化机自动控制系统8:91农业机械学报’+--,’;4#/"4?<"4018",9李文雄’陆俭国’等1交流接触器的可靠性技术8:91低压电器’+--.’;@#/,<.18"49陈超苏1$%&控制系统及变频器应用的抗干扰问题8:91世界仪表与自动化’+--.’;"+#/3-<3"18".9刘建国1变频器及常见故障剖析8:91电工技术’+--4’;""#/,4<,.1M N O P Q RS R TU N S V P W S X P Y RY Z S [X Y \S X P ]]Y R X U Y V V P R QO ^O X N \Z Y U O N N T]Y S X N U _S O N TY R‘a bc de f g h i j k h i ’c dl m f n m g k o’p g kp g h i m d g ’q f r d j g f ’sg h ic g f t k d ’u f g he f v f g;wx y z {y |}~!~x "#$%y !&{&’&~()"*|"{#’+&’"x +,~#$x y {-x &{)y ’,{y {!&".)(*|"{#’+&’"~’wx y z {y |+"--"4’/${y x#0_O X U S ]X /E 123745672.567.56824229:;<52=3<492>27;829?1;=92=5;?@8=;>24229:;<5?1AB C <7?56<19@2255D 212294E ;=4229C 4<A 29C =?1A@;92=1<A =?:C 75C =<78=;9C :5?;11I D 2<C 5;@<5?::;15=;77?1A46452@E ;=5D 2:;<52=3<44C ::244E C 776924?A 1291$%&;$=;A =<@@<F 72%;A ?:&;15=;772=#3<45<G 21<45D 2:;15=;7:;=2;E 5D 246452@’<19%&H 5;C :D4:=2213<42@87;629E ;=D C @<17:;@8C 52=?152=<:5?;1?152=E <:21I D 246452@?152A =<529G ?194;E52:D 1?B C 24?1:7C 9?1A8=;A =<@@?1A ’E =2B C 21:6:;1>2=4?;1’7?B C ?9E 7C H@;1?5;=?1A<194214;=4’25:1I D 28=?@<=645=C :5C =2’3;=G ?1A8=?1:?872;E 5D 2:;<52=’4272:5?;1;E :;15=;77?1A46452@D <=93<=2<19@2<4C =24E ;=<15?7I <@7@?1A32=2<74;?15=;9C :291F C @<17:;@8C 52=?152=<:5?;14;E 53<=23<48=;A =<@@29F 65D 24;E 53<=2;E $=;I ;;7J $=;&L 1L 6452@:;15=;77?1A4;E 53<=23<48=;A =<@@29?15D 2E ;=@;E 7<992=9?<A =<@F 6L 528?7C ?:=;J K B L ’=2<7?M ?1AG ?194;E E C 1:5?;14?1:7C 9?1A427E 78=;52:5?;1E ;=3;=G ?1A42:5?;14’<::C =<52B C <15?E ?:<5?;1’<C 5;@<5?::;175=;77?1A<19D C @<1?M 29;82=<5?;11I 245=24C 754;13D 2<542294:;<5?1A4D ;3295D <5:;<5?1A<::285<F ?7?56=2<:D 29001+2’:;2E E ?:?215;E ><=?<5?;1;1:;<5?1A C 1?E ;=@?563<4-132’3D ?:D8=;>295D <55D 24229:;<52=:;C 79?@8=;>2:;<5?1AB C <7?562E E 2:5?>2761N N ^O Y U T O /$%&)4229:;<52=)<C 5;@<5?::;15=;77?1A )5;C :D4:=221)5=<149C :2=)<15?7I <@@?1A44"农业工程学报+--?年 万方数据基于PLC的种子包衣机自动控制系统设计与实现作者:胡良龙, 胡志超, 高刚华, 计福来, 王海鸥, 田立佳, Hu Lianglong, Hu Zhichao,Gao Ganghua, Ji Fulai, Wang Haiou, Tian Lijia作者单位:农业部南京农业机械化研究所,南京,210014刊名:农业工程学报英文刊名:TRANSACTIONS OF THE CHINESE SOCIETY OF AGRICULTURAL ENGINEERING年,卷(期):2007,23(8)引用次数:3次1.李明.姚东伟.万丽.杨晓峰我国农作物种子包衣机械应用概况[期刊论文]-种子 2005(12)2.张立新.谢志根5BGF-4型种子包衣机的研制[期刊论文]-石河子大学学报(自然科学版) 2001(1)3.乔文德.刘庆国.王桂玲种子包衣机的结构及应用[期刊论文]-山东农机 2003(7)4.唐军红种子包衣机存在的问题与改进措施[期刊论文]-石河子科技 2006(4)5.吴文福.赵学笃.马中苏.徐振国种子包衣剂定量供给装置[期刊论文]-农业机械学报 2000(1)6.韩豹.申建英.范伟种子包衣机的研制[期刊论文]-农机化研究 2003(2)7.陈寿顺.陈公望新一代种子包衣机问世 1998(9)8.赵德春.赵巍5BJZ-3.0型新型种子包衣机的设计[期刊论文]-农机化研究 2006(3)9.温海江.高春光.梁全.马文军丹麦CIMBRIA HEID CC20型旋转式种子包衣机简介[期刊论文]-现代化农业 2002(11)10.沈慎.赵春宇.陈大跃基于LPC2114的农用种子包衣机嵌入式控制系统设计[期刊论文]-工业仪表与自动化装置2005(6)11.吴春生.戈永杰.梁全.佟富强德国PETKUS CT2-10型种子包衣机简介[期刊论文]-现代化农业 2001(7)12.谢焕雄.高刚华.田立佳.彭宝良.胡良龙种子丸化机自动控制系统[期刊论文]-农业机械学报 2003(4)13.李文雄.陆俭国.刘明生交流接触器的可靠性技术[期刊论文]-低压电器 2005(8)14.陈超苏PLC控制系统及变频器应用的抗干扰问题 2005(12)15.刘建国变频器及常见故障剖析[期刊论文]-电工技术 2004(11)1.期刊论文胡志超.计福来.高刚华.王海鸥.彭宝良.胡良龙5B-5型智能化种子包衣机-农业机械学报2007,38(9)简述了5B-5型智能化种子包衣机基本结构、工作过程及技术特点.种子和种衣剂供给系统分别采用叶轮式喂料器和计量泵,用变频驱动实现种子和种衣剂的精确、稳定地供给及在线调整与计量校准.包衣和混合机构采用双甩盘式离心雾化装置、复式柔性搅拌装置,破损率低、包衣效果好.控制系统以PLC为核心,配置液晶触摸屏和多种传感器,实现智能化操作与监控.对小麦包衣的试验结果表明:实际生产率5.2 t/h、破损率0.1%、均匀性变异系数0.6%、包衣合格率96.5%、自动清机度99.5%.2.学位论文胡良龙种子包衣机PLC控制系统的设计与实现2008针对我国现有种子包衣设备电控系统简单粗放,严重制约种子包衣质量提高的现状,为提升包衣质量,满足现代农业生产对用种的高标准需求,本选题结合国家“十五”科技攻关计划项目,研究设计了5B-5型新一代种子包衣设备自动控制系统。