单闭环反馈控制系统的基本组成
1-直流调速系统-单闭环
单闭环直流调速系统 -- 有静差系统
单闭环直流调速系统 -- 有静差系统
在假设忽略各种非线性因素等条件下,系统中各环节
的稳态关系为:
➢ 电压比较器 UnUn *Un
➢ 放大器 ➢ 晶闸管触发整流装置 ➢ 调速系统开环机械特性
➢ 测速发电机
UcKpUn
Ud0KsUc nUd0 IdR
Ce
Unn
单闭环直流调速系统 -- 有静差系统
Ce
转速 n 随触发角 变化, 改变 角,即可得到一簇 平行的机械特性曲线。
单闭环直流调速系统 -- 一般概念
转速控制基本要求: 1. 调速:在一定的速度范围内分级或无级调速; 2. 稳速:以一定的精度在所需转速上运行,尽量不受
负载变:频繁起动、制动的生产机械要求尽量缩
单闭环直流调速系统 -- 有静差系统
用阶跃函数表示晶闸管整流和触发装置的输入、输出
关系: U d0K sU c(tT s)
做拉氏变换得到晶闸管整流触发装置传递函数:
Ud0( s) Uc( s)
KseTss
因 Ts 远小于系统其它环节时间常数,故将其近似为
一阶惯性环节:
Ud0( s) Ks Uc(s) Tss1
单闭环直流调速系统 -- 有静差系统
由动态结构图可以得到系统开环传递函数:
W (s)C e(T ss1)K T (p m K T ss2T m s1)
假设 IdL=0 (不考虑负载变化对稳定性的影响),得
到系统闭环传递函数:
KpKs
Wcl(s)TmTTs
Ce(1K) s3Tm(TTs)s2TmTs s1
ans = 1.1695
>> syms a U2 t
(完整版)转速负反馈单闭环直流调速系统.
例2.2 对于例2.1所示的开环系统,采用转 速负反馈构成单闭环系统,且已知晶闸管
整流器与触发装置的电压放大系数 Ks = 30,
= 0.015V·min/r,为了满足给定的要求,
计算放大器的电压放大系数KP 。
IdR
U*n +
_
∆Unn
Uct Kp
Ud0 + _ E Kss
1/Ce
n
Un
解:在例2.1中已经求得
IdR
U*n +
_
∆Unn
Uct Kp
Ks
Ud0 + _ E
1/Ce
n
Un
n
开环机械特性
闭环静特性
B
C
A
A’
D
Ud4 Ud3 Ud2 Ud1
O
Id1
Id2
Id3
Id4
Id
图2.19 闭环系统静特性和开环机械特性的关系
由此看来,闭环系统能够减少稳态速 降的实质在于它的自动调节作用,在于它 能随着负载的变化而相应地改变电枢电压, 以补偿电枢回路电阻压降。
运动控制系统
第2 章
直流调速系统
2.3 转速负反馈单闭环直流调速系统
2.3.1 单闭环调速系统的组成及静特性 2.3.2 单闭环调速系统的动态分析 2.3.3 无静差调速系统的积分控制规律 2.3.4 单闭环调速系统的限流保护
2.3.1 单闭环调速系统的组网 功率驱动装置 电动机
3. 开环系统机械特性 和闭环系统静特性的关系
比较一下开环系统的机械特性和闭环系统的静 特性,就能清楚地看出反馈闭环控制的优越性。如
果断开反馈回路,则上述系统的开环机械特性为
n Ud0 IdR Ce
自动控制系统:1.2 反馈闭环控制调速系统的稳态分析
注意: 闭环调速系统的静特性表示闭环系统电动机转速与负载 电流(或转矩)间的稳态关系,它在形式上与开环机械特性 相似,但本质上却有很大不同,故定名为“静特性”。
1.2.4 开环机械特性和闭环静特性的关系
系统的开环机械特性为 (1)闭环系统速降小,静特性硬
n
Ud0
IdR
K
p
K
sU
* n
RId
Ce
Ce
系统的开环机械特性为 (1)闭环系统速降小,静特性硬
n
Ud0
IdR
K
p
K
sU
* n
RId
(2)系统的静差率小,稳速精度高
Ce
Ce
Ce 开环和闭环系统的静差率分别为
n0op nop
而闭环时的静特性可写成
n
K
p
K
sU
* n
RI d
Ce (1 K ) Ce (1 K )
scl
ncl , nocl
sop
2)静特性
(1)只考虑给定un*作用 时的闭环系统
un
闭环系统的开环放大系数(增益)K K p Ks
闭环系
Ce
统的稳
态结构
框图
n Kp Ks / Ce
U
* n
1 K p Ks / Ce
n
K
p
K
sU
* n
Ce (1 K )
(2)只考虑扰动-IdR作
用时的闭环系统
n
1
RI d Ce (1 K )
1.2.4 开环机械特性和闭环静特性的关系
系统的开环机械特性为 (1)闭环系统速降小,静特性硬
n
Ud0
IdR
单闭环直流调速系统介绍课件

智能化:引入 人工智能技术, 实现系统的自 适应控制和自 学习能力
网络化:通过 互联网和物联 网技术,实现 远程监控和故 障诊断
集成化:将多 个子系统集成 为一个整体, 提高系统的集 成度和可靠性
节能和环保的发展趋势
01
提高能源利用率:通过优化控制策略和算法,降低能耗,提高能源利用率
02
减少污染排放:采用环保材料和工艺,减少生产过程中的污染排放
单闭环直流调速 系统介绍课件
目录
01. 单闭环直流调速系统的基本 概念
02. 单闭环直流调速系统的控制 方式
03. 单闭环直流调速系统的应用 领域
04. 单闭环直流调速系统的发展 趋势
1
单闭环直流调速 系统的基本概念
直流调速系统的组成
01
整流器:将交流 电转换为直流电
02
滤波器:去除直 流电中的交流成
04
应用场合:适用于对转速要求不高,但对响应速度要求较高的场合
电流控制方式
STEP1
STEP2
STEP3
STEP4
电压控制方式: 通过控制电压 来调节电流, 实现调速
电流控制方式: 通过控制电流 来调节电压, 实现调速
速度控制方式: 通过控制速度 来调节电流, 实现调速
位置控制方式: 通过控制位置 来调节电流, 实现调速
网络化:实现远程监控 和控制,提高系统的可 维护性和可扩展性
谢谢
速度控制方式
1
电压控制方式:通过调节直流电源的输出电压来控制电机的转速
2
电流控制方式:通过调节直流电源的输出电流来控制电机的转速
3
转速控制方式:通过调节电机的转速来控制电机的转速
4
位置控制方式:通过调节电机的位置来控制电机的转速
试验二实验指导
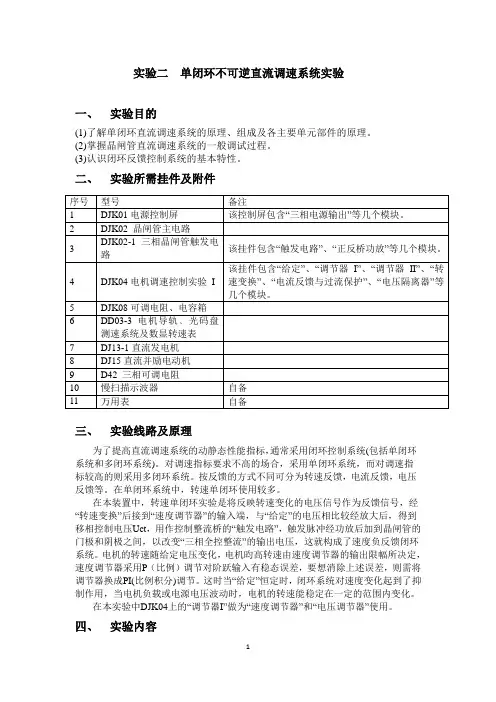
实验二单闭环不可逆直流调速系统实验一、实验目的(1)了解单闭环直流调速系统的原理、组成及各主要单元部件的原理。
(2)掌握晶闸管直流调速系统的一般调试过程。
(3)认识闭环反馈控制系统的基本特性。
二、实验所需挂件及附件三、实验线路及原理为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。
对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。
按反馈的方式不同可分为转速反馈,电流反馈,电压反馈等。
在单闭环系统中,转速单闭环使用较多。
在本装置中,转速单闭环实验是将反映转速变化的电压信号作为反馈信号,经“转速变换”后接到“速度调节器”的输入端,与“给定”的电压相比较经放大后,得到移相控制电压Uct,用作控制整流桥的“触发电路”,触发脉冲经功放后加到晶闸管的门极和阴极之间,以改变“三相全控整流”的输出电压,这就构成了速度负反馈闭环系统。
电机的转速随给定电压变化,电机昀高转速由速度调节器的输出限幅所决定,速度调节器采用P(比例)调节对阶跃输入有稳态误差,要想消除上述误差,则需将调节器换成PI(比例积分)调节。
这时当“给定”恒定时,闭环系统对速度变化起到了抑制作用,当电机负载或电源电压波动时,电机的转速能稳定在一定的范围内变化。
在本实验中DJK04上的“调节器I”做为“速度调节器”和“电压调节器”使用。
四、实验内容(1)DJK04上的基本单元的调试。
(2)Uct不变时直流电动机开环特性的测定。
(3)Ud不变时直流电动机开环特性的测定。
(4)转速单闭环直流调速系统。
五、预习要求(1)复习自动控制系统(直流调速系统)教材中有关晶闸管直流调速系统、闭环反馈控制系统的内容。
(2)掌握调节器的基本工作原理。
(3)根据实验原理图,能画出实验系统的详细接线图,并理解各控制单元在调速系统中的作用。
(4)实验时,如何能使电动机的负载从空载(接近空载)连续地调至额定负载?图2-1 晶闸管直流调速系统原理图图2-2 转速单闭环系统原理图六、实验方法(1)DJK02和DJK02-1上的“触发电路”调试①打开DJK01总电源开关,操作“电源控制屏”上的“三相电网电压指示”开关,观察输入的三相电网电压是否平衡。
转速负反馈单闭环直流调速系统
为负载电流。
传递函数
在零初始条件下,取等式两侧的拉氏变换,得 电压与电流间的传递函数
Id(s) 1/ R Ud0 (s) E(s) Tls 1
电流与电动势间的传递函数
E(s) R Id (s) IdL (s) Tms
动态结构图
Ud0
+
- E(s)
1/R Tl s+1
Id (s)
Id (s)
检测精度——反馈检测装置的误差也是反馈控制 系统无法克服的,因此检测精度决定了系统输出 精度。
2.3.2 单闭环调速系统的动态分析
通过稳态性能的研究可知:引入转速负 反馈并使放大倍数 K 足够大,就可以减少稳 态速降,满足系统的稳态要求。但是放大系 数过大,会使闭环系统动态性能变差,甚至 造成不稳定,因此有必要对系统进行动态性 能的分析。
例2.2 对于例2.1所示的开环系统,采用转 速负反馈构成单闭环系统,且已知晶闸管
整流器与触发装置的电压放大系数 Ks = 30,
= 0.015V·min/r,为了满足给定的要求,
计算放大器的电压放大系数KP 。
IdR
U*n +
_
∆Unn
Uct Kp
Ud0 + _ E Kss
1/Ce
n
Un
解:在例2.1中已经求得
失控时间Ts的分析
u
2
O
ud
Ud01
t Ud02
O
Uc
Uc1
O
1
1
Ts
Uc2
t
2
2 t
O
t
图2.23 晶闸管触发与整流装置的失控时间
最大失控时间Tsmax的计算
显然,失控制时间是随机的,它的大小随发 生变化的时刻而改变,最大可能的失控时间就是 两个相邻自然换相点之间的时间,与交流电源频 率和整流电路形式有关,由下式确定
第二章 单闭环直流调速系统ppt课件
由于反馈电压与给定电压同为负,成为正反馈,只要给定电压稍大 于零,经反馈电压叠加后,偏差电压会越来越大,电机转速急速升高,造 成飞车事故。
在转速单闭调速实验中表现为:给定从零增加一点,电机转速急速 升高,再减小给定,电机转速不减小,失控。
四、闭环调速与开环调速的比较
静特性方程: nCKep1KsUKn*Ce1RKId 闭环转速降
nb
IdR
1 K Ce
机械特性方程: n U d I d R
Ce
开环转速降
nk
IdR Ce
① 闭环静特性比开环机械特性硬得多。负载电流相等时
nb
nk
1 K
②
闭环系统的静差率要比开环小得多。理想空载转速相等时,
1、开环调速系统采用正给定电压,为什么单闭环调速系统要采用负 给定电压?改变给定电压时调节哪个旋钮?
2、为什么要求触发电路中Ulf端接地? 3、接线前,设备初始状态检查和调整包含哪些注意事项? 4、什么是触发电路的最大移相控制电压?如何测出该电压值? 5、主电路中为什么要串入电抗器?值取多大? 6、怎样将两个可调电阻并联使用? 7、怎样判断转速反馈是负负馈?如果接成了正反馈,怎样改正? 8、怎样测试调节器放大系数、整流装置放大系数和转速反馈系数?
② 被控量总是跟随给定量变化。 即转速跟随给定电压变化。 ③ 闭环系统对作用于闭环内前向通道上的干扰有调节作用。 而作用于 闭环外或非前向通道上的干扰没有调节作用。
.
14
.
15
思考题:
1.什么是有静差调速系统?
2.闭环调速系统对什么样的干扰有调节作用? 试举例说明。
.
16
单闭环直流调速系统
第十七单元 晶闸管直流调速系统第二节单闭环直流调速系统一.转速负反馈宜流调速系统转速负反馈直流调速系统的原理如图17-40所示。
转速负反馈直流调速系统由转速给左、转速调节器ASR 、触发器CF 、晶闸管变流器U 、 测速发电机TG 等组成。
直流测速发电机输出电压与电动机转速成正比。
经分圧器分圧取出与转速n 成正 比的转速反馈电压Ufn 0转速给定电压Ugn 与Ufn 比较,其偏差电压A U=Ugn-Ufn 送转速调节器ASR 输入 端。
ASR 输出电圧作为触发器移相控制电压Uc,从而控制晶闸管变流器输出电压Udo 本闭环调速系统只有一个转速反馈环,故称为单闭环调速系统.1. 转速负反馈调速系统工作原理及其静特性设系统在负载T L 时,电动机以给定转速nl 稳定运行,此时电枢电流为Idl,对应 转速反馈电圧为Ufnl,晶闸管变流器输出电压为Udi 。
当电动机负载T L 增加时,电枢电流Id 也增加,电枢回路压降增加,电动机转速下 降,则Ufn 也相应下降, 而转速给定电压Ugn 不变,A U=Ugn-Ufn 加。
转速调节器ASR 输出电压Uc 增加,使控制角a 减小,晶闸管整流装置输出电压Ud 增加,于是电动机转速便相应自动回升,其调节过程可简述为:T L t — Id t — ld (R 》+Rd ) t I -*Ufn I U t — Uc t -* a | —Ud t -*n t 。
图17-41所示为闭坏系统静特性和开环机械特性的关系。
n亠 =H o + A//图17—41闭环系统静特性和开环机械特性的关系.图中①②③④曲线是不同Ud之下的开环机械特性。
假设当负载电流为Idl时,电动机运行在曲线①机械特性的A点上。
当负载电流增加为Id2时,在开环系统中由于Ugn不变,晶闸管变流器输出电压Ud 也不会变,但由丁•电枢电流Id增加,电枢回路压降增加,电动机转速将由A点沿着曲线①机械特性下降至&点,转速只能相应下降。
晶闸管-直流电动机单闭环调速系统
1.直流调速系统的动态指标对于一个调速系统,电动机要不断地处于启动、制动、反转、调速以及突然加减负载的过渡过程,此时,必须研究相关电机运行的动态指标,如稳定性、快速性、动态误差等。
这对于提高产品质量和劳动生产率,保证系统安全运行是很有意义的。
(1)跟随指标:系统对给定信号的动态响应性能,称为“跟随”性能,一般用最大超调量σ,超调时间t和震荡次数N三个指标来衡量,图s2.1是突加给定作用下的动态响应曲线。
最大超调量反映了系统的动态精度,超调量越小,则说明系统的过渡过程进行得平稳。
不同的调速系统对最大超调量的要求也不同。
一般调速系统σ可允许10%~35%;轧钢机中的初轧机要求小于10%,连轧机则要求小于2%~5%,;而在张力控制的卷曲机反映了系统的快速性。
系统(造纸机),则不允许有超调量。
调整时间ts为0.2s~0.5s,造纸机为0.3s。
振荡次数也反映了系统的例如,连轧机ts稳定性。
例如,磨床等普通机床允许震荡3次,龙门刨及轧机则允许振荡1次,而造纸机不允许有振荡。
图2.1突加给定作用下的动态响应曲线(2)抗扰指标:对扰动量作用时的动态响应性能,称为“抗扰”性能。
一般用最大动态速降Δnmax ,恢复时间tf和振荡次数N三个指标来衡量。
用图2.2是突加负载时的动态响应曲线。
最大动态速降反映了系统抗扰动能力和系统的稳定性。
由于最大动态速降及扰动量的大小是有关的,因此必须同时注明扰动量的大小。
恢复时间反映了系统的抗扰动能力和快速性。
振荡次数N同样代表系统的稳定性及抗扰动能力图2.2突加负载时的动态响应曲线2.晶闸管电动机直流调速系统存在的问题图2.3 V-M系统的运行范围晶闸管整流器也有它的缺点。
首先,由于晶闸管的单向导电性,它不允许电流反向,给系统的可逆运行造成困难。
由半控整流电路构成的V-M 系统只允许单象限运行(图2.3a),全控整流电路可以实现有源逆变,允许电动机工作在反转制动状态,因而能获得二象限运行(图2.3b)。
转速单闭环直流调速系统(45页)
3 开环系统机械特性与闭环系统静特性的比较
机械特性比较: n
开环机械特性
闭环静特性
A
B
C
D
A"
U d04 U d03 U d02 U d01
O
Id
1
Id 2
Id3
Id 4
Id
图 4.3.4 闭环系统静特性与开环系统机械特性的关
开环机械特性
n
?
K
pK
s系U
* n
Ce
?
RId Ce
?
n0,op ? ? nop
? 电动机轴上的转矩和转速应服从电力拖动系统的运动方程式 (在忽略粘性摩擦的情况下,即第三章 3.2.1节的转矩平衡方
程式(3.2-4)):
Te -TL =
GD 2 375
dn dt
(4.3-11)
单闭环调速系统的动态数学模型?
考虑到在额定励磁条件下Te ? C m Id ,e ?C en ,定义下列时间常数:
K ? ? nop ? 1= 275 ? 1=103.6
? nc1
2.63
由 K ? K pK s? /C e ,可以求得放大器的放大系数为
Kp
?
KC e
K s?
?
103.6? 0.2? 30 ? 0.015
46
转速负反馈自动调速系统 静态参数的计算?
转速负反馈自动调速系统静态参数的计算(例题4.2-2 )
Un ?
图 4.3.8 转速单闭环调速系统的动态结构图(基于假 ? c ? 1/3Ts )
设
? 转速负反馈单闭环调速系统的传递函数:
K pK s
W
c1 ?s??
n(s) ?
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单闭环反馈控制系统是一种常见的控制系统结构,用于实现对被控对象(如物理过程或系统)的控制。
它由以下基本组成部分组成:
1.参考输入信号:参考输入信号是我们期望系统输出达到的目标值或期望值。
它是控制系统的输入信号,用来驱动系统进行控制动作。
2.传感器:传感器用于测量系统的实际输出信号,并将其转换为电信号或其他形式的可操作信号。
传感器是控制系统的反馈元件,通过提供对系统实际状态的反馈信息,用于与参考输入信号进行比较。
3.误差检测器:误差检测器比较传感器输出信号与参考输入信号,计算它们之间的误差(即误差信号)。
误差信号代表了实际输出与期望输出之间的差异。
4.控制器:控制器是决定如何调整系统行为以减小误差的关键组件。
它接收误差信号作为输入,并使用控制算法来计算控制器输出信号。
5.执行器:执行器是根据控制器输出信号来实际执行控制动作的元件。
它将控制器输出信号转化为合适的形式(如电信号、液压或机械力等)来操纵被控对象。
6.被控对象:被控对象是需要进行控制的物理过程或系统。
它可以是任何需要被调节或控制的系统,如温度控制系统、机器人臂、电动机等。
7.反馈回路:反馈回路将被控对象的输出信号通过传感器传回到误差检测器,形成闭环反馈控制系统。
反馈信号提供了系统实际输出的信息,用于修正误差并调整控制器输出,以使系统逼近期望值。
基于这些基本组成部分,单闭环反馈控制系统能够实现对被控对象的准确控制和调节,通过不断测量和校正误差,使系统能够在一定精度的范围内达到期望的状态或运行条件。