3自动送料小车控制1
送料小车的自动化控制

送料小车的自动化控制发表时间:2018-12-04T21:28:17.640Z 来源:《基层建设》2018年第29期作者:张琳悦[导读] 摘要:可编程序控制器PLC现已广泛地应用于自动控制领域,运料小车在现代化的工厂中普遍存在,由于PLC 的可靠性高、环境适应性强、灵活通用、使用方便、维修简单,所以PLC 的应用领域在工业自动化控制领域越来越受到重视和普及应用,它的使用提高自动送料系统的自动化水平及可靠性。
华北理工大学电气工程学院河北唐山 063000摘要:可编程序控制器PLC现已广泛地应用于自动控制领域,运料小车在现代化的工厂中普遍存在,由于PLC 的可靠性高、环境适应性强、灵活通用、使用方便、维修简单,所以PLC 的应用领域在工业自动化控制领域越来越受到重视和普及应用,它的使用提高自动送料系统的自动化水平及可靠性。
为了实现自动送料小车的手动和自动化的转化,改善以往小车单纯手动送料,减少大量人力、物力、财力和时间,提高生产效率的可靠性,实现自动化生产。
关键词:PLC;自动化;送料小车可编程序控制器(PLC)是一种用于工业自动化控制的专用计算机,实质上属于计算机控制方式。
PLC 与普通微机一样。
以CPU 作为字处理器,实现字运算和数据存储,另外还有位处理器,进行位运算与控制。
PLC 控制具有可靠性高、易操作、易维修。
编程简单、灵活性强等特点。
现代工厂运用PLC 控制运料小车来代替传统的人力推车运料,使生产自动化、智能化,大大提高了生产效率,降低了劳动成本。
一、控制系统和控制方法及要求自动送料小车可以由可编程控制器或单片机等元器件来设计实现,但由于单片机设计线路较复杂,控制电路中需要加入A/D,D/A转换器,还需要大量的中断口地址,而且单片机控制线路易受到外界环境的干扰,也具有不稳定性,所以根据上述PLC的特点及PLC的运用领域使我选择了PLC来设置自动送料小车的控制,由于PLC的应用和发展迅速、在经济效益上取得了显著的效果。
plc控制小车自动送料
PLC控制送料小车的设计一.自动送料小车概述自动送料小车系统是用于物料输送的流水线设备,主要是用于煤粉、细砂等材料的运输。
自动送料小车系统一般是由给料器、传送带、小车等单体设备组合来完成特定的过程。
送料小车控制系统采用了PLC控制。
此送料小车电气控制系统设计具有手动和自动两种工作方式。
在程序设计上采用了模块化的设计方法。
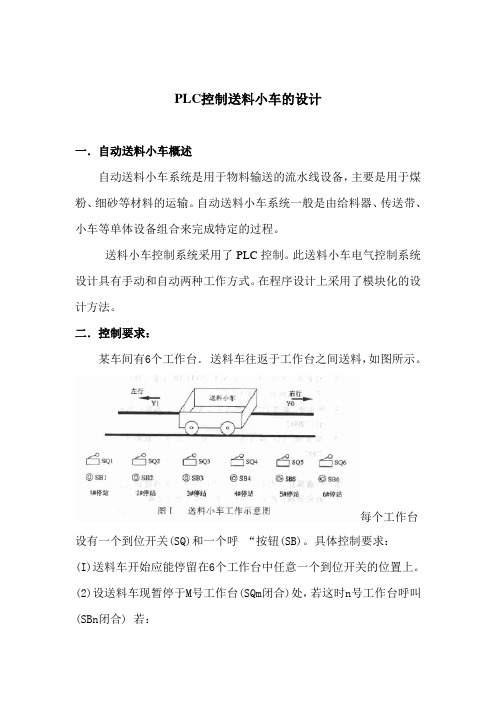
二.控制要求:某车间有6个工作台.送料车往返于工作台之间送料,如图所示。
每个工作台设有一个到位开关(SQ)和一个呼“按钮(SB)。
具体控制要求:(I)送料车开始应能停留在6个工作台中任意一个到位开关的位置上。
(2)设送料车现暂停于M号工作台(SQm闭合)处,若这时n号工作台呼叫(SBn闭合) 若:①m>n,送料车左行,直至SQn动作,到位停车,即送料车停车位置SQ 的编号大于呼叫按钮SB的编号时,送料车往左运行至呼叫位置后停止;②m<n,送料车右行.直至SQn动作,到位停车,即进料车所停位置SQ 的编号小于呼叫按钮SB前编号时,送料车往右运行至呼叫位置后停止;④ m=n,送料车原位不动,即送料车所停位置SQ的编号与呼叫按钮SB 的编号相同时,送科车不动。
三.PLC选型根据控制要求,系统的输入量有:启、停按钮信号,1号位-6 号位的限位开关SQl—SQ6信号,1号位-6号位的呼叫开关SB1~SB6信号:系统的输出信号有:前进、后退控制电机接触器驱动信号,电机运行的声光信号。
共需实际输人点数l7个,输出点数4个,本文选用日本三菱公司的FXON-40MR产品,其输入点数为24,输出点数为I6点。
小车行驶控制系统PLC的I/O资源配置表如表l所示:系统I/O资源配置表(2)外围设备在外围设备方面,采用RS232通信或RS485通信方式,与上位机连接,外部输入设备有光电开关,接近开关,按钮等。
外部输出设备有接触器,电磁阀,指示灯等。
输入/输出点分配如图1所示。
三菱图1 PLC输入/输出点分配图四.控制程序设计本程序设计的关键是处理好呼叫按钮和到位开关的位置关系,为此我们采用了将每个位置的行程开关与每个位置的按钮记录到数据寄存器中去,如将送料小车当前位置送到数据寄存器DO中,将呼叫工作台号送数据寄存器Dl中,然后通过比较DO与Dl中的数据,决定送料小车运行方向和达到的目标位置。
送料小车三地自动往返循环控制系统设计与装调培训PPT课件

2. 常用传感器
光电式接近开关
电感式接近开关
电容式接近开关
常见的几种传感器实物图 a)力传感器 b)温度传感器 c)液位传感器 d)气体传感器 e)湿度传感器
3. 接近开关的图形符号 接近开关的文字符号是SQ,图形符号如图所示。
4. 接近开关的接线
接线 方法
接线示意图(BN:棕,BU:蓝)
作台或送料小车的多地自动往返循环控制 的情况,如图所示为送料小车三地自动往返循环控制工作画面。
送料小车三地自动往返循环控制系统
送料小车三地自动往返循环控制工作示意图
本任务的主要内容是,运用步进逻辑公式设计法,用 PLC控制系统实现对送料小车三地自动往返循环的控制。 其控制要求如下:
送料小车运行程序分步图
2. 列出本任务控制的逻辑代数方程式 根据步进逻辑公式可列出如下方程组:
由于行程开关SQ1、SQ2、SQ3 是小车的反馈输入信号, 若分别用X003、X004 和X005所代替,则上述方程组可转 换成下列方程组:
当要结束这组循环时,则必须增加停止按钮SB1 (X000) 来使系统停止工作。因此,逻辑代数方程组需再次修改为:
由于KM1得电,送料小车向右运行;而KM2得电,送料 小车向左运行,所以程序步与KM1和KM2之间的函数为:
考虑到送料小车正反转的切换都是通过延时5s后开始的, 假设正转延时定时器为T1,反转延时定时器为T2,那么程 序步与定时器T1和T2之间的函数关系为:
分别将输出继电器Y000 (KM1)、Y001 (KM2)和停止按钮 SB1 (X000)及定时器T1、T2带入KM1和KM2的函数表达式, 可得送料小车向左和向右运行的逻辑代数方程组为:
步进控制设计法主要分为步进逻辑公式设计法、顺序 功能图设计法两大类,其中顺序功能图设计法又有三种不 同的基本结构形式的编程设计方法即单序列结构编程设计 法、选择序列结构编程设计法和并行序列结构编程设计法。 本任务主要介绍步进逻辑公式设计法。
送料小车三地自动往返循环控制系统设计与装调培训PPT课件
(2)第i程序步用逻辑代数书写的过程为每一步Mi的产 生都是由前一步压动行程开关或按下按钮(转换条件)Xi 产生,则
Mi XiMi1
产生后应该有一段时间区域保持不变,故应该有自保 (自锁),则:
Mi XiMi1 Mi
每一步的消失都是随后一步的出现而消失:
Mi (XiMi1 Mi)Mi1
3. 逻辑代数方程式转换成梯形图的方法 将逻辑代数方程式转换成梯形图的方法是根据逻辑代 数方程式,利用“启—保—停”电路,通过PLC的基本指 令,画出对应的梯形图。
步进控制设计法主要分为步进逻辑公式设计法、顺序 功能图设计法两大类,其中顺序功能图设计法又有三种不 同的基本结构形式的编程设计方法即单序列结构编程设计 法、选择序列结构编程设计法和并行序列结构编程设计法。 本任务主要介绍步进逻辑公式设计法。
二、步进逻辑公式设计法
步进逻辑公式设计法就是利用步进逻辑公式,列出 每个程序步的逻辑代数式后,梯形图的 方法。
送料小车三地自动往返循环控制 系统设计与装调
送料小车三地自动往返循环控制系统设计与 装调
1.掌握步进逻辑公式设计法的含义。 2.能用步进逻辑公式设计法进行步进顺序控制系统的设计。 3.能根据控制要求画出程序分步图,并能灵活地运用步进 逻辑公式设计法,完成小车三地自动往返循环控制的梯形图程 序设计。 4.能正确安装、调试送料小车三地自动往返循环控制系统 的控制线路。
由于KM1得电,送料小车向右运行;而KM2得电,送料 小车向左运行,所以程序步与KM1和KM2之间的函数为:
考虑到送料小车正反转的切换都是通过延时5s后开始的, 假设正转延时定时器为T1,反转延时定时器为T2,那么程 序步与定时器T1和T2之间的函数关系为:
分别将输出继电器Y000 (KM1)、Y001 (KM2)和停止按钮 SB1 (X000)及定时器T1、T2带入KM1和KM2的函数表达式, 可得送料小车向左和向右运行的逻辑代数方程组为:
送料小车PLC控制

PLC 控制技术课程设计1 设计任务与要求 (1)1.1 课程设计任务 (1)1.2 课程设计要求 (1)2 设计方案 (3)2.1 运料小车的运动分析 (3)2.2 设备控制要求 (4)2.3 整体方案论证 (4)2.4 系统资源分配 (5)2.4.1 I\ O 地址分配 (5)2.4.2 数字量输入部份 (5)2.4.3 数字量输出部份 (6)3 硬件电路设计 (7)4 软件设计 (9)4.1.1 梯形图 (9)4.1.2 指令表 (12)5 调试过程 (15)5.1 呼叫按钮 (15)5.2 行程开关 (15)5.3 比较 (15)5.4 向左运动 (15)5.5 向右运动 (15)5.6 调试操作 (16)6 结论 (18)参考文献 (19)PLC 控制技术课程设计任务描述某自动生产线上运料小车的运动如图所示,运料小车由一台三相异步电动机拖动电动机正转,小车右行,机电反转,小车左行。
在生产线上有5 个编码为1~5 的站点供小车停靠,在每一个停靠站安装一个行程开关以监测小车是否到达该站点。
对小车的控制除了启动按钮和住手按钮之外,还设有 5 个呼叫开关(SB1~SB5)分别与5 个停靠点相对应。
(1)按下启动按钮,系统开始工作,按下住手按钮,系统住手工作;(2)当小车当前所处停靠站的编码小于呼叫按钮SB 的编码时,小车向右运行,运行到呼叫按钮 SB 所对应的停靠站时住手;(3)当小车当前所处停靠站的编码大于呼叫按钮SB 的编码时,小车向左行,运行到呼叫按钮 SB 所对应的停靠站时住手;(4)当小车当前所处停靠站的编码等于呼叫按钮SB 的编码时,小PLC 控制技术课程设计车保持不动;(5)呼叫按钮开关 SB1~SB5 应具有互锁功能,先按下者优先。
(6)设计 PLC 硬件电器连接图。
(7)设计 PLC 控制程序(梯形图或者指令程序)。
PLC 控制技术课程设计某自动生产线上运料小车的运动如图 2-1 所示:图 2-1 运料小车示意图运料小车由一台三相异步电动机拖动,机电正转,小车向右行,电 机反转,小向左行。
送料小车自动控制系统(“小车”文档)共3张

控制系统的主回路与电动机正反转控制主回路系统如图5-16所示。
输入输出X0 Nhomakorabea正转启动SB1
Y0 控制电动机正转接触器KM1
X1
反转启动SB2
Y1 控制电动机反转接触器KM2
X2
停止SB3
X3
右限位SQ1
X4
左限位SQ2
X5
中限位SQ3
表5-2小车控制系统I/O分配图
控制电动机正转接触器KM1 送料小车自动控制系统 图控5制-3系1统P的LC主I/回O端路子与接电线动图机正反转控制主回路系统如图5-16所示。 控制电动机正反转接触器KM12 表5-2小车控制系统I/O分配图 控表制5-2系小统车的控主制回系路统与I/电O分动配机图正反转控制主回路系统如图5-16所示。 图系5统-3的1起P动LC(I/SOB端1子、接SB线2)图、停止(SB3)需要三个按钮,起点和终点处的两个行程开关是用来自动控制小车的往复运动。
表这控系5里制统-2用 电 的小两动起车个机动控接正(制触转S系B器接1统、分触I/S别器OB分控K2M配)制1图、小停车止左(行S(BK3M)2需)要右三行个(按K图钮M1,5)-起3。1点和P终L点CI处/O的端两子个接行线程图开关是用来自动控制小车的往复运动。
只送要料对 小小车车自的动拖控动制电系动统机实现正反转控制即可。 控只制要电 对动小机车反的转拖接动触电器动机KM实2现正反转控制即可。 控图制5-3电1动P机LC正I/转O端接子触接器线KM图1 控制系统要实现送料小车在限位开关X4处装料,10S后装料结束,开始右行,碰到X3后停下来卸料,15S后左行,碰到X4后又停下来装料, 如此循环往复。 控送制料电 小动车机自正动转控接制触系器统KM1 只这要里对 用小两车个的接拖触动器电分动别机控实制现小正车反左转行控(制KM即2可)。右行(KM1)。 控制系统要实现送料小车在限位开关X4处装料,10S后装料结束,开始右行,碰到X3后停下来卸料,15S后左行,碰到X4后又停下来装料, 如此循环往复。
送料小车自动化控制
哈尔滨职业技术学院印制
毕业论文正文
第 1页
绪
论
近年来,随着科学技术的进步和微电子技术的迅速发展,可编程序 控制技术已广泛应用于自动化控制领域,可编程序控制器(PLC)以其高 可靠性和操作简便等特点,已经形成了一种工业趋势。
而随着企业现代化生产规模的不断扩大和深化,使得生产物的输送 成为生产物流系统中的一个重要环节。运料小车自动控制正是用来实现 输送生产物的控制系统,随着 PLC 的发展,国外生产线上的运输控制系 统非常广泛的采用该控制系统,而且有些制造厂还开发研制了出了专用 的逻辑处理控制芯片,我国的大部分工控企业的运料小车自动控制系统 都是从国外引进的,成本高,为了满足现代化生产流通的需要,让 PLC 技术与自动化技术相结合,并结合组态王软件完成数据通信、网络管理、 人机界面(HMI)和数据处理,充分的利用到我国的工控企业生产线上, 让该系统在各种环境下都能够工作,而且成本低,易控制,安全可靠, 效率高。
(三)控制要求............................................................................................................ 8
(四)方案论证............................................................................................................ 9
自动仓库运料小车的PLC控制系统
摘要PLC用存储逻辑代替接线逻辑,大大减少了控制设备外部的接线,使控制系统设计及建造的周期大为缩短,同时日常维护也变得容易起来,更重要的是使同一设备经过改变程序而改变生产过程成为可能。
本次课程设计为基于PLC的自动仓库运料小车控制系统的设计。
系统构成有10个仓库,每个仓库有一个呼叫指示灯,运料小车停在任意位置。
当呼叫指示灯亮时允许呼叫,当呼叫指示灯灭时呼叫无效。
当呼叫仓库小于小车位置,小车后退,当呼叫仓库大于小车位置,小车前行。
运料小车在被呼叫仓库位置时,要停留30分钟后允许呼叫。
本次课程设计中通过各仓库行程开关的通断情况判断小车当前位置,以便了解呼叫位置和小车当前位置的相对情况,从而控制电动机的正转、反转和停止,达到了对运料小车自动控制的设计要求。
关键词:行程开关;PLC;指示灯目录第1章绪论 (1)第2章课程设计的方案 (2)2.1概述 (2)2.2系统组成总体结构 (2)第3章硬件设计 (4)3.1模块选择 (4)3.2模块连接 (5)3.3行程开关的选择 (5)3.4系统功能及I/O分配表 (6)3.5PLC外部接线 (6)3.6电动机正反转控制设计及其选型 (7)第4章软件设计 (9)4.1程序设计流程图 (9)4.2梯形图程序设计 (10)第5章系统测试与分析/实验数据及分析 (15)第6章课程设计总结 (16)参考文献 (17)第1章绪论早期运料小车电气控制系统多为“继电器—接触器”组成的复杂系统,这种系统存在设计周期长、体积大、成本高等缺陷,几乎无数据处理和通信功能,必须有专人负责操作。
后期系统通常把PLC控制技术与变频器调速相结合,利用PLC 控制变频器,再通过变频器优良的调速性能,可实现运料小车的自动化控制。
在工业快速发展,科技日新月异的今天,运料小车应该逐渐向智能化发展。
运料小车在现代化的工厂中普遍存在。
传统的工厂依靠人力推车运料,这样浪费了大量的人力物力,降低了生产效率,不满足社会发展趋势。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参考资料 三菱FX 系列PLC 应用技能实训
教学过程
引入:自动送料系统在工业生产总应用的比较广泛。
现有一小车自动
往返循环控制设备,其传统的控制是由继电器控制系统来实现的,电气控制原理图如下图。
(学生分析其工作原理,教师补充)
由于采用继电器控制,所用的继电器较多,控制线路也较为复杂,加上行业生产环境等方面的因素限制,故障率较高,且不便于维修,为此需要设计一种以PLC 为核心的自动控制系统对其进行改造。
分析过程:小车自动往返循环工作示意图如下图。
小车的前进、后退电动机通过丝杆驱动。
控制要求为:①自动循环工作;②点动控制(供调试用)。
小车的前进与后退是通过电动机的正反转来控制,所以完成这一动作只要用电动机正反转控制基本程序即可。
进行PLC 设计 ①I/O 分配表
参考资料 三菱FX 系列PLC 应用技能实训
教学过程 ②PLC 接线图
③梯形图设计(采用功能添加法设计梯形图并做讲解,做GX软件程序输入)
实训调试。