理论力学(14)
《理论力学》第十三章--虚位移试题及答案
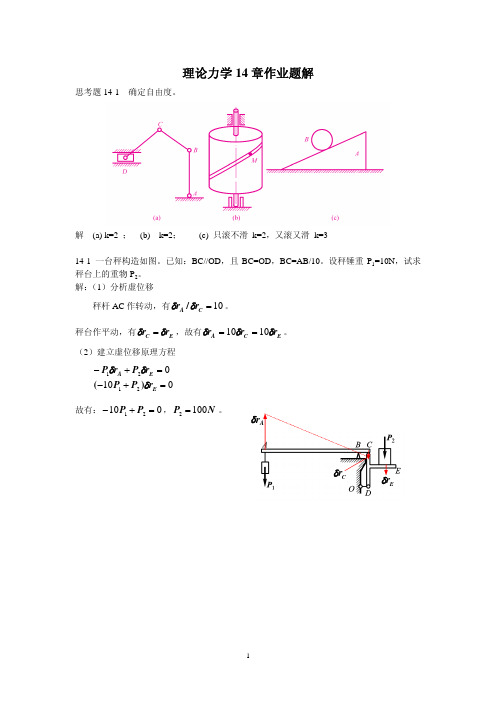
理论力学14章作业题解思考题14-1 确定自由度。
解 (a) k=2 ; (b) k=2; (c) 只滚不滑 k=2,又滚又滑 k=314-1 一台秤构造如图。
已知:BC//OD ,且BC=OD ,BC=AB/10。
设秤锤重P 1=10N ,试求秤台上的重物P 2。
解:(1)分析虚位移 秤杆AC 作转动,有10=C A r r d d /。
秤台作平动,有E C r r d d =,故有E C A r r r d d d 1010==。
(2)建立虚位移原理方程1002121=+-=+-E E A r P P r P r P d d d )(故有:01021=+-P P ,N P 1002=。
Cr d Er14-5 OA=l ,OC=R满足的条件。
解: (用虚位移原理求解)(1) 运动分析(虚位移关系分析)A 处虚位移关系用合成运动的理论分析。
A 为动点,OC 为动系。
r e A r r r r r r d d d +=f d d cos A e r r =另外:R r l r C e /d d = (2) 虚功方程fd f f d d d d cos /)cos /(cos /R l F F r R l F F R r l F r F r F r F C C C A C 21212121000==-=-=-14-9 已知:AC=BC=EC=GC=DE=DG=l ,荷载F 2。
求平衡时的F 1。
解 用解析法,1个自由度,选q 为广义坐标。
建立坐标,如图。
(1) 计算虚位移qdqd q qdq d q sin ,cos cos ,sin l y l y l x l x A A D D 2233-====(2) 计算力的投影 2211F F F F x y -=-= , (3) 建立虚位移原理方程qqdq q q d d sin cos )cos sin (230320212121F F l F l F x F y F D x A y ==×-×=+Oxy14-12 F=4kN, AO=OE=5m. 求D 解:(1) 接触D 处水平约束,代之约束力。
理论力学

1、运动分析。----说明机构中主要构件的运动形式。 2、作速度分析,需要画出相关速度,求一点速度或图形角
速度。(若要分析加速度,一般需要求图形的角速度)
画速度 (1)沿点的运动轨迹切线,与相关的角速度方向协调。
(2)要符合速度投影定理。
3、作加速度分析,需要画出相关加速度,求一点加速度 或图形角加速度。 画加速度
例8-10
如图所示,在椭圆规的机构中,曲柄OD以匀角速度ω绕O 轴转动。
OD=AD=BD=l。求:当 60 时,尺AB的角加速度和点A的加速度。
B ABC AB D
O O
O
A A
vD
O
aA
n a BA
a A B
aD
v A
aD
n a AD y’ a AD
n a AD l 2
n x’ a A cos aD cos 2 a AD
y’ n a A 0 aD sin aAD cos a AD sin
x’
若OD变速转动,有什么变化?
a A l
2
a 0 AD AD
a AD 0 AD
解:
(1)动点:OA上的A点
动系:摇杆O1B
(2)运动分析: 绝对运动: 圆周运动。 相对运动: 直线运动。 牵连运动: 摇杆转动。
(3)速度分析与计算
v a r
ve
O ω
va
B vr
A ω1
vr va cos
ve va sin
r 2 O1 1 2 2 O1 A l r ve
理论力学解答9-14

ϕ
mg
v 1 2 gR sin ϕ d ϕ = ∫0 ∫0 v ⋅ dv , 2 v = − gR(cos ϕ − 1) 故 an = 2 g (1 − cos ϕ ) ,即 mg cos ϕ − FN = 2mg (1 − cos ϕ )
小球脱离半圆柱时, FN = 0 , cos ϕ = 2(1 − cos ϕ ) , cos ϕ = 2 / 3 , ϕ = 48.2
故物块 A 相对小车运动停止时滑动的时间,由冲量定理
p2 − p1 = − f (30 + 0.3) g ⋅ t (30 + 0.3) × 1.84 − (30 + 0.3) × 3.96 = −0.5 × (30 + 0.3) gt
, t = 0.432s
2
小车匀加速直线运动,其加速度为 a = f (30 + 0.3) g / 35 = 4.242m/s ,由质点相对运动动力学方程
o
1
理 论 力 学 作 业 解 答 5-25 一质量为 m 的小球 M 套在半径 R 的光滑大圆环上,并可沿大圆环滑动。如大圆环在水平面内以匀角 速 ω 绕通过 O 的铅直轴转动,求小球 M 相对于大圆环运动的运动微分方程。 FIC 解:小球水平面内受力分析如图 FN FIe 相对运动为圆周运动 aen vr
y
dt
= ∑ Fiy = FN − W − 2 P 2P eω sin ωt g
py =
2P 2 eω cos ωt = dt g 2P 2 FN = eω cos ωt + W + 2 P g
7-6
dp y
W P P
理论力学复习题答案

理论力学复习题1一、 是非题1、 力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。
( √)2、 在理论力学中只研究力的外效应。
( √)3、 两端用光滑铰链连接的构件是二力构件。
( × )4、 作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。
( √ )5、 作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。
(× )6、 三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
( × )7、 平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。
(√ )8、 约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。
( × )9、 在有摩擦的情况下,全约束力与法向约束力之间的夹角称为摩擦角。
(× )10、 用解析法求平面汇交力系的平衡问题时,所建立的坐标系x ,y 轴一定要相互垂直。
( × )11、 一空间任意力系,若各力的作用线均平行于某一固定平面,则其独立的平衡方程最多只有3个。
( × )12、 静摩擦因数等于摩擦角的正切值。
( √ )13、 一个质点只要运动,就一定受有力的作用,而且运动的方向就是它受力方向。
( × )14、 已知质点的质量和作用于质点的力,质点的运动规律就完全确定。
(× )15、 质点系中各质点都处于静止时,质点系的动量为零。
于是可知如果质点系的动量为零,则质点系中各质点必都静止。
( × )16、 作用在一个物体上有三个力,当这三个力的作用线汇交于一点时,则此力系必然平衡。
( × )17、 力对于一点的矩不因力沿其作用线移动而改变。
( √ )18、 在自然坐标系中,如果速度υ = 常数,则加速度α = 0。
( × )19、 设一质点的质量为m ,其速度 与x 轴的夹角为α,则其动量在x 轴上的投影为mvx =mvcos a 。
理论力学第14章
双侧约束
单侧约束
单侧约束
双侧约束
定常约束
非定常约束
2.虚位移 在某瞬时,质点系在约束允许的条件下,可能实现的 任何无限小的位移称为虚位移。与约束条件有关。
虚位移用变分符号 δ表示
虚位移: δ r , δx, δ
实位移是质点系真实实现的位移,它与约束条件、 时间、主动力以及运动的初始条件有关 .
δ xC
hδ sin2
Fh
M sin 2
例14-5
求图所示无重组合梁支座A的约束力.
解:解除A处约束,代之 FA ,给虚位移,如图
列虚功方程:
δWF FAδsA F1δs1Mδ F2δs2 0
δ δsA ,
8
δs1
3δ
3 8
δsA,
δsM
11δ
11 8 δsA
δs2
4 7
δ
sM
约束方程中不包含坐标对时间的导数,或者约 束方程中的积分项可以积分为有限形式的约束为 完整约束.
例如:车轮沿直线轨道作纯滚动时
xA r 0 微分形式
积分 xA r C
完整约束
约束方程是等式的,称双侧约束(或称固执约束). 约束方程为不等式的,称单侧约束(或称非固执单 侧约束)
本章只讨论定常的双侧、完整、几何约束.
FBx
3 2
F
cot
k 0
cot
例14-3
已知:如图所示椭圆规机构中,连杆AB长为l,滑
块A ,B与杆重均不计,忽略各处摩擦,机构在图示
位置平衡.
求:主动力 F与A F之B 间的关系。
解: (1)几何法 给虚位移 δrA , δrB ,
由虚功方程 Fi δ,r有i :0
理论力学复习题试题库及答案
理论力学试题静力学部分一、填空题:(每题2分)1、作用于物体上的力的三要素是指力的 大小 、 方向 和 作用点 。
2、当物体处于平衡状态时,作用于物体上的力系所满足的条件称为 平衡条件 ,此力系称为 平衡 力系,并且力系中的任一力称为其余力的 平衡力 。
3、力的可传性原理适用于 刚体 ,加减平衡力系公理适用于 刚体 。
4、将一平面力系向其作用面内任意两点简化,所得的主矢相等,主矩也相等,且主矩不为零,则此力系简化的最后结果为 一个合力偶5、下列各图为平面汇交力系所作的力多边形,试写出各力多边形中几个力之间的关系。
A 、 0321=++F F F 、B 、 2341F F F F =++C 、 14320F F F F +++=D 、 123F F F =+ 。
6、某物体只受三个力的作用而处于平衡状态,已知此三力不互相平行,则此三力必 并且 汇交于一点、共面7、一平面力系的汇交点为A ,B 为力系作用面内的另一点,且满足方程∑m B =0。
若此力系不平衡,则其可简化为 作用线过A 、B 两点的一个合力 。
8、长方形平板如右图所示。
荷载集度分别为q 1、q 2、q 3、q 4的均匀分布荷载(亦称剪流)作用在板上,欲使板保持平衡,则荷载集度间必有如下关系: q 3=q 1= q 4=q 2 。
9、平面一般力系平衡方程的二力矩式为 ∑F x = 0、∑M A = 0、∑M B = 0 ,其适用条件是 A 、B 两点的连线不垂直于x 轴10、平面一般力系平衡方程的三力矩式为 ∑M A =0、∑M B=0、∑M C =0 ,其适用条件是 A 、B 、C 三点不共线 。
、正方形平板受任意平面力系作用,其约束情况如下图所示,则其中 a b c f h属于静定问题; d e g 属于超静定问题。
12、已知平面平行力系的五个力(下左图示)分别为F 1 = 10 N ,F 2 = 4 N ,F 3 = 8 N ,F 4 = 8 N 和F 5 = 10 N ,则该力系简化的最后结果为 大小0.4 N ·m 、顺时针转的力偶 。
理论力学课件 虚位移原理
N
设AB杆与BC杆在B点用光滑
铰链连接.由N = -N 得
A
C Nr + Nr = Nr - Nr = 0
24
(3)连接两质点的无重刚杆
连接两质点的刚杆由于不
计自重,均为二力杆. 设质点
M1和M2的虚位移分别为 r1
M2
与r2 则有:
r1cos 1 = r2cos 2 N1r1 + N2r2
n
Fi ri 0
i 1
n
或:
Fxixi Fyiyi 0
i 1
27
五、虚位移原理的应用 1.求解复杂系统(运动机构)的平衡条件.
1)画虚位移图.
2)利用几何法或解析法求各虚位移之 间的关系.
3)计算各主动力的虚功. 4)利用虚位移原理求解平衡条件.
28
例题5. 套筒分别置于光 滑水平面上互相垂直的 滑道中,受力分别为P和 Q如图所示.长为 l 的连 杆和水平方向夹角为 , 摩擦均不计.求系统的平 衡条件.
以Ni表示质点系中质点Mi的约束力的合 力 , ri表示该质点的虚位移 , 则质点系的理想 约束条件可表示为
n
Ni·ri = 0
i 1
23
(1)光滑接触面
光滑接触面的约束反力恒垂直
N
于接触面的切面 , 而被约束质点的
r
虚位移总是沿着切面的 , 即N r
Nr = 0
r B N (2)连接两刚体的光滑铰链
l
A(x,y) x 图1-3
6
O
y 左图中摆锤A的约束方程为
l
(细绳)
x2 + y2 l 2
A(x,y) x
图1-4
理论力学课后习题及答案
应按下列要求进行设计(D )A.地震作用和抗震措施均按8度考虑B.地震作用和抗震措施均按7度考虑C.地震作用按8度确定,抗震措施按7度采用答题(共38分)1、什么是震级什么是地震烈度如何评定震级和烈度的大小(6分)震级是表示地震本身大小的等级,它以地震释放的能量为尺度,根据地震仪记录到的地震波来确定(2分)地震烈度是指某地区地面和各类建筑物遭受一次地震影响的强弱程度,它是按地震造成的后果分类的。
(2分)震级的大小一般用里氏震级表达(1分)地震烈度是根据地震烈度表,即地震时人的感觉、器物的反应、建筑物破坏和地表现象划分的。
(1分)D.地震作用按7度确定,抗震措施按8度采用4.关于地基土的液化,下列哪句话是错误的(A)A.饱和的砂土比饱和的粉土更不容易液化B.地震持续时间长,即使烈度低,也可能出现液化C.土的相对密度越大,越不容易液化D.地下水位越深,越不容易液化5.考虑内力塑性重分布,可对框架结构的梁端负弯矩进行调幅(B )A.梁端塑性调幅应对水平地震作用产生的负弯矩进行B.梁端塑性调幅应对竖向荷载作用产生的负弯矩进行C.梁端塑性调幅应对内力组合后的负弯矩进行D.梁端塑性调幅应只对竖向恒荷载作用产生的负弯矩进行6.钢筋混凝土丙类建筑房屋的抗震等级应根据那些因素查表确定( B )A.抗震设防烈度、结构类型和房屋层数B.抗震设防烈度、结构类型和房屋高度C.抗震设防烈度、场地类型和房屋层数D.抗震设防烈度、场地类型和房屋高度7.地震系数k与下列何种因素有关( A )A.地震基本烈度B.场地卓越周期一、 C.场地土类1.震源到震中的垂直距离称为震源距(×)2.建筑场地类别主要是根据场地土的等效剪切波速和覆盖厚度来确定的(√)3.地震基本烈度是指一般场地条件下可能遭遇的超越概率为10%的地震烈度值(×)4.结构的刚心就是地震惯性力合力作用点的位置(×)5.设防烈度为8度和9度的高层建筑应考虑竖向地震作用(×)6.受压构件的位移延性将随轴压比的增加而减小C.地震作用按8度确定,抗震措施按7度采用答题(共38分)1、什么是震级什么是地震烈度如何评定震级和烈度的大小(6分)震级是表示地震本身大小的等级,它以地震释放的能量为尺度,根据地震仪记录到的地震波来确定(2分)地震烈度是指某地区地面和各类建筑物遭受一次地震影响的强弱程度,它是按地震造成的后果分类的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
23
取B为基点.
A
vA
aC aB aCnB aCB
(2)
an CB
= r B2
a CB
=
r
B
把(2)式向水平方向投影得:
0
=
aB
sin
-
a CB
B = 18 rad/s2
l
AB
a CB aB
O
BO
an R
r CB B B B
C
aB
24
阅读材料和作业
• 阅读材料 – (1)P366---P387 – (2)P418---P439
A
O1
O2
C
B
10
解:杆O1A和杆O2B 作定轴转动.滑块C作直线动.AB 杆和BC杆作平面运动.其瞬心分别为C1和C2
A
O1
C1
O2
C
B
C2
11
例题11-7.图示瞬时滑块A以速度 vA 沿水平直槽向左 运动, 并通过连杆AB 带动轮B 沿园弧轨道作无滑动
的滚动.已知轮B的半径为r ,园弧轨道的半径为R ,滑
置时连杆AB和BD的角速
D
度及冲头D的速度.
A
30 O
14
解:杆AB和BD杆作平面运动.
C
C1为AB杆的瞬心.
C2为BD杆的瞬心.
vA= (OA) = 6m/s vB
AB
vA C1 A
=8.66rad/s
B
BD
vB=(C1B)AB
=(C2B)BD
C1 30
AB
vD
30
vD=(C2D)BD C2
D
O1
OD .
16
解:等边三角形构件ABC作
D
平面运动 C1为其瞬心.
OD
vB= (O1B) = a
A
C1
O2
ve
C
vAcos30 = vBcos60 vr
3 vA 3 a
O 60 vA B
vB
ve
1 2 vA
3 a 6
OD
ve OA
3 6
O1
17
11-5.平面图形上各点的加速度
aM = ae + ar ae = aO´
A
vA
A
vA
vB
B
C
C
vB B
8
(d)已知在某瞬时图形上A
和 B两点的速度的方位互 A
相平行,但不垂直于A B的
连线.此时瞬心在无穷远处. O
B
这种情况称为瞬时平动.
此时: AB = 0
AB 0
9
例题11-6.在图示结构中,已知曲柄O1A的角速度.图 中O1A = r, O2B= BC= l .确定平面运动杆件的瞬心.
a
n
O
MO
ar = aMO´
S
a an
MO
MO
aO aMO aM
M
a aO MO
平面图形上任一点的加速度等于基点的加速度 与该点随图形绕基点转动的切向加速度和法向加 速度三者的矢量和.
a a a an
M
O
MO
MO
18
例题11-10.半径为R的车轮沿直线轨道作无滑动的 滚动,如图所示.已知轮心 A在图示瞬时的速度为vA 及加速度为aA .求该瞬时车轮边缘上瞬心 C的加速 度aC .
点,问题将大大的简化.(1)式将变为:
vM = vMO
(2)
那么, 在某一瞬时,图形上速度等于零的点如何
确定?
3
设在某一瞬时,已知图形上A点
的速度为vA图形的角速度为.
L
若沿速度vA的方向取半直线 AL. vCA C
vA
将此半直线绕A点按 的转向转
过90到AL的位置.
则在AL上由长度AC = vA/ 所定
BD= 5.77rad/s vD= 3.46m/s
A
30 O
vA
15
例题11-9. 图示为一平面
D
连杆机构,等边三角形构
件 ABC 的边长为a 三个
A
顶点 A,B 和分别与套筒
O2 C
A,杆O1B 和O1C铰接,套
筒又可沿着杆OD 滑动. O 60
B
设杆O1B长为a并以角速
度转动,求机构处于图
示位置时杆OD的角速度
N
vN
vM
M
图形上任一点的速度大小与该点到速度瞬心C的
距离成正比,其速度方位垂直于该点与速度瞬心C的
连线. C又称为平面图形的瞬时转动中心. CM和 CN
称为瞬时转动半径.
5
速度瞬心可在平面图形内,也可在平面图形外.且 它的位置不是固定不变,而是随着时间变化的.
(2)速度瞬心的确定
(a)当平面图形沿某一固定面作无滑动的滚动时, 图形上与固定面的接触点C即为该图形的瞬心.
• 作业 – (1)9---19 ; 9---21 ; – (2)11---11 ; 11---14 ; 11---16
25
再见
26
l
A
vA
O
R
r
B
21
l
解: 轮B作平面运动 vA C为瞬心.
A
sin = 0.6
cos = 0.8
杆AB为瞬时平动.
vB
vB = vA
AB = 0
B
vB r
12 6 rad / s 2
BO
vB Rr
12 4 rad / s 52
O
BO
R
r
B
B
C
22
l
取A为基点.
A
vA
aB aA aBnA aBA
aA = 0
a = n BA
0
AB
a = BA
(AB)
AB
aB = (AB) AB
vB
O
anBRO
r
B
a
B
aB an a
an (R r) 2BO
C
a BA
aBA an a (1) 把(1)式向CBO方向投影得:
a cos BA
=
an
5AB × 0.8 = (5 - 2)×42
AB = 12 rad/s2
块A 离园弧轨道中心O 的距离为l .求该瞬时连杆AB
的角速度及轮B边缘上M1和M2点的速度.
l
A
vA
O
M1 R
r
B
M2
12
l
解:轮B和杆AB作
A
平面运动,C为轮 vA
B的瞬心. 杆AB作瞬时平动. AB = 0
vA = vB
vM1 vB
B
vB r
vA r
vM1 = 2 vB = 2 vA
O
r M1vM2R
A vA L
出的一点 C,就是此瞬时图形上速度等于零的一点.
证明: vC = vA - vCA = vA - (AC)
= vA -(vA/) = 0
4
一般情况下,在平面图形中,
每一瞬时 都唯一地存在着速
度等于零的点.该点称为平面
C
图形 在此瞬时的瞬时速度中 心.简称速度瞬心. 记为C.
vM =(CM) vN =(CN)
A
vA
aA
19
解:轮A作平面运动C
为其瞬心.
vA R
aA R
A
a
an
vA
aA
CA
ห้องสมุดไป่ตู้
CA
aA
C
aC aA aC A aCnA
aCA
R
R
aA R
aA
aCnA
R2
R
vA R
2
v
2 A
R
aC
v
2 A
R
20
例题11-11.图示瞬时滑块A以匀速度vA= 12 cm/s 沿水平直槽 向左运动,并通过连杆AB带动轮B沿园弧轨道作无滑动的滚 动.已知轮B的半径为r = 2cm,园弧轨道的半径为R = 5cm, 滑 块A离园弧轨道中心 O的距离为l = 4cm .求该瞬时连杆AB的 角加速度及轮B的角加速度.
B
M2
B
C
vM 2 (CM 2 ) B 2 r B 2 vA
13
例题11-8. 图示曲柄肘式
C
压床,已知曲柄OA的角速
30
度 = 40rad/s ,OA=15cm,
AB=80cm,CB=BD=60cm. 当曲柄与水平线成 30角 B
时连杆AB处于水平位置,
而肘杆 CB与铅垂线也成
30
30角.求此机构在图示位
理论力学
(14)
1
内容提要
十一.刚体的平面运动
11-4.速度瞬心 11- 5.平面图形上各点的加速度
2
11-4.速度瞬心
(1)问题的提出
vM = vo + vMO
(1)
(1)式是应用基点法求平
面图形上任一点速度的合
y
y
vM
vMO
vo
M
O
vo x
成公式.
o
x
既然基点是任选的,若选取速度等于零的点为基
A
vA
C
vA
A
C
6
(b) 已知在某瞬时图形
C
上任意两点A和B速度的
方位且它们互不平行.则
通过两点A和B分别作速
A
度vA 和 vB 的垂线其交点
O
C即为瞬心.
B
7
(c)已知在某瞬时图形上A和B两点的速度互相平
行,且垂直于A B的连线 ,但速度大小不等.则此时