点的速度合成定理
合集下载
牵连运动为定轴转动时点的加速度合成定理

理论力学
aa ae ar aC
即当牵连运动为转动时,动点的绝对加速度等于牵连加速度、相对 加速度与科氏加速度的矢量和。这就是牵连运动为转动时点的加速 度合成定理。
设动点沿直杆 OA 运动,杆 OA 又以角速度 绕O 轴匀速转动。
将动坐标系固结在杆上。在瞬时 t ,动点在 OA杆的M 位置, 它的相对速度、牵连速度分别为 vr 和 ve ,经时间间隔 t后, 杆OA 转动 角,动点运动到 OA 杆的M 点处,这时动点的相 对速度、牵连速度分别为 vr 和 ve ,如图6-10(a)所示。
又由图6-10(c)可知 ve ve1 ve2 (c)
式中,ve1 表示由于牵连速度方向变化而引起的牵连速度增量;ve2 表示由于存在相对运动使牵连速度大小变化而引起的牵连速度增量。
将式(b)、式(c)一起代入式(a),可得
aa
lim vr1 t0 t
lim vr2 t0 t
lim ve1 t0 t
将式(e)、式(f)和式(6-11)一并代入式(d),于是牵连
运动为转动时点的加速度合成定理得到证明,
即式(d)可写成
aa ae ar aC
所得结论也适用于一般情况。科氏加速度的表达式为
aC 2e vr
根据矢量积运算法则,aC 的大小为
aC 2evr sin
式中, 是矢量e与vr 的夹角;
lim ve2 t0 t
lim ve ve t0 t
lim OM OM
t0
t
vr
其方向也垂直于 vr,并与 转向一致。
由于这两项附加加速度的大小相同,方向一致,所以,两项合
并成一项,用 aC 表示,它的大小为
aC 2vr
它的方向与 vr 垂直,并与 转向一致。这项加速度称为科氏加速度。
8-2 速度合成定理

ve──t瞬时动点的牵连速度 动为任何运动的情况。
2
速度合成定理的应用
曲柄滑杆机构
•应用速度合成定理时,动点和动系的选择原则 (1)动点相对动系必须有相对运动; (2)动点的相对运动轨迹要简单清晰。 •解题方法 (1)几何法 (2)解析法
3
例1:凸轮顶杆机构
相对轨迹
绝对轨迹
v
vr
φ
va
ve
φ
牵连轨迹
uuuuur uuuuur uuuuuur
MM
uuuuur
'
MMuu1uuur
M1M
'
uuuuuur
lim MM ' lim MM1 lim M1M '
t0 t
t0 t
t0 t
uuuuuur
uuuuuur
lim M1M ' lim MM 2
t0 t
t0 t
由速度定义可知
uuuuur
uuuuur
uuuuuur
lim
t 0
MM t
'
va
lim
t 0
MM1 t
ve
lim MM 2 t0 t
vr
上一节 下一节 返回上级1 菜单
Ⅰ(t)
vr
va
ve
o o
ⅡΔ o
va ve vr
称为速度合成定理 速度合成定理的几何意义:
速度平行四边形
va──t瞬时动点的绝对速度
速度合成定理适用于绝
vr──t瞬时动点的相对速度 对运动、相对运动和牵连运
Q O1A l2 r2 2r sin 1/ 2 ve r / 2
Q ve 1g2r
点的速度合成定理

va v r y
ve *
x
x
va
ve
tan30 2 3e
3
vr
2va
4 3e
3
vABva
2 3e
3
■ 点的速度合成定理 ★ 应用举例
1、选择动点、动系、定系
要选择合适的动点、动系。
解 2、运动分析
题
绝对运动与相对运动都是指点的运动,它可能作
步
直线运动或曲线运动。 牵连运动则是指参考体的运动即刚体的运动,它
O x
牵连点:M′(脚牵印连)点(:甲?板上)
va vr ve 三者关系?
★ 速度合成定理
z y
z o
x
刚性金属丝
y
O
小环
x
动点:小环(沿金属丝滑动)
定系( oxy)z :固定于地面
动系( oxyz ):固连于刚性金属丝
★ 速度合成定理
☆
z
zz
动 系 的
o z y x o x y o
oy
x
运
骤 可能作平动、转动或其它较复杂的运动。
3 、速度分析及其求解
牵连速度:某瞬时动系上与动点相重合的那一点
(称为牵连点)相对于定系的速度;
由 va vrve 作平行四边形,其对角线为v a ;
va vr ve 满足“6-4=2”方可求两个未知量。
■ 点的速度合成定理 ★ 讨论与思考
例 1中
动点:滑块A 动系:固连于O1B杆 绝对运动:绕O点的圆周运动 相对运动:沿滑杆的直线运动
牵连运动:绕O1轴的定轴转动
y
B
x
●A
O1
动点: O1B杆上的A点 动系:固连于OA杆
大连理工大学理论力学第13课

l 2 r 22 ve ve r 1 2 2 O1 A l2 r2 l r
已 知 : O A 常 数 , O A r , O O 1 l , O A 水 平 。 求 : 1。 rl r 2 r 2 vr ve 1 2 2 2 2 2 2 l r l r l r
重点:
1.点的复合运动的基本概念。 2.明确一个动点、两个坐标系和三种运动。
3.点的速度合成定理、加速度合成定理及其应用。
难点:
1.正确判定动点的相对运动,能正确地在动系上观察动点 的运动。 2.牵连点的概念,以及牵连速度、牵连加速度和 科氏加速度的判断与计算。
3.动点、动系的选择。
点的速度合成定理:
vr2 aax ' ' 2 v cos r r
aa aax ' aay '
2
2
方向由其方向余弦确定
例7-11 刨床的急回机构如图所示。当曲柄OA 以匀
3.加速度
n aa aet aen
例7-11
a r aC
大小 2 r ? 12 O1 A ? 21vr √ √ √ √ 方向 √ 沿 x 轴投影
n ax t e t e
2 2 2 2 rl l r a rl (l r ) 2 1 3 2 2 2 2 2 2 2 2 O1 A l r l r l r
例7-10
已知:vr ,ω, φ, CO=r 求:aa 解:1. 动点:气体微团C, 动系 : Ox’y’ 2. 绝对运动:未知
相对运动:曲线运动(AB)
牵连运动:定轴转动(O轴)
第七章 第二节 点的速度合成定理
ve
(3) 作速度平行四边形。 (注意:va为平行四边形的对角线) (4) 利用几何关系解出未知量。
Hale Waihona Puke va vrD Aw
O l
ve va cos 45 2u / 2
j
B u
ve 2u / 2 u w OA 2l 2l bu D点速度 v D bw 2l
2 2 vr ve va 2ve va cosq
3 3R
例(P152例7-4)已知定滑轮半径为R,以等角速度w绕轴O顺时针 方向转动,重物M铅垂下落。试求图示瞬时M相对于滑轮的相 对速度。 解(1)动点:M, w 动系:滑轮。 O (2)分析三种运动和三种速度。 q (3)作速度平行四边形。 (4)利用几何关系解出未知量。
例7-5 (P153例7-5 ) 杆BCD以匀速v1向右运动,杆OA以匀角速度w 绕O转动,当q=45º 时,OM为l。试求该瞬时销钉M的绝对速度。 x 解(1)动点:M, D (2)先取BCD为动系 A ve2 (3)运动、速度分析 有 va = ve1 + vr1 (4)再取OA为动系 ve1 M (5)运动、速度分析 有 va = ve2 + vr2 动点M速度唯一,得
vr1
ve1 + vr1 = ve2 + vr2
vr2
w
向x 轴投影 ve1 sinq vr 1 cosq ve 2 B ve1sinq - ve 2 vr 1 v1 2lw cosq 2 2 2 va ve1 vr 1 2 v1 - 2 2 v1l w + 2 l 2w 2
tan j v r 1 v 1 2 lw 1 ve1 v1 2 lw v1
7-2-3 点的速度合成定理习题(2)
B
α1
ω1
θ
O1
R C
ω
O
动点、动系的选取
方案1:
A
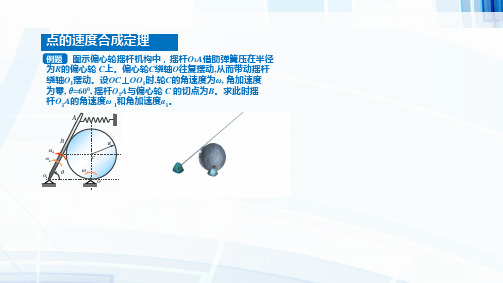
动点:摇杆O1A上的点B来自动系:固定在偏心轮 C上
B
方案2:
动点:偏心轮 C上的点B 动系:固定在摇杆O1A上
θ
O1
R C
ω
O
两种方案的绝对运动和相对运动运动轨迹
方案1: (动点: 摇杆O1A上的点B ; 动系: 固定在偏心轮 C上)
绝对运动轨迹: 以O1为圆心,O1B 为半径的圆弧
ve1 = 0.6 3(m / s)
vr1 = −0.8(m / s)
ve2 = 0.2 3(m / s) vr2 = −0.4(m / s)
vay
ve1
A
大小 vax = −ve1 sin 300 = −0.3 3(m / s)
ω2
vay = ve1 cos300 + vr1 = 0.1(m / s)
ve2 = ω2 ⋅OM = ω2 ⋅b / cos 300 = 0.2 3(m / s)
3)速度合成定理:
va = ve2 + vr 2
大小 ×
√
×
方向 ×
√
√
y2′ M
O ω1
b
A x2′
B ω2 vr 2
300
ve2
C
va = ve1 + vr1
大小 ×
√×
方向 ×
√√
ve1
B
A ω2
M
vr 2
va = ve2 + vr 2
大小 × √ ×
O
ω1
300
vr1
《点的速度合成》课件

04
点的速度合成定理的实 例分析
实例一:刚体平动的速度合成
总结词
刚体平动速度合成是点速度合成的最简单情 况,主要涉及平移运动的速度合成。
详细描述
刚体平动是指刚体在平面上的直线运动,其 上任意一点的速度合成遵循平行四边形法则 。设刚体平动速度为V,刚体上任意一点P 的速度为v,则v的方向与V相同,大小为V 减去P点相对于刚体质心的线速度。
对未来研究的展望
深入研究点的速度合成定理的数 学基础
为了更好地理解和应用点的速度合成定理,需要深入研 究其数学基础,包括向量运算、线性代数等方面的知识 。
探索更多应用场景
随着科学技术的发展,点的速度合成定理的应用场景将 不断拓展。未来可以探索其在机器人学、虚拟现实等领 域的应用,为相关领域的发展提供理论支持。
定理在其他领域的应用
航空航天领域
点的速度合成定理在航空航天领域有广泛应用。例如,飞机和火箭在飞行过程中需要考 虑到风速、气流等因素对它们运动状态的影响,这些都可以通过应用点的速度合成定理
来计算。
车辆工程
车辆工程师在设计车辆时需要考虑轮胎与地面之间的摩擦力、风阻等因素对车辆运动状 态的影响。通过应用点的速度合成定理,可以更准确地模拟和预测车辆的运动状态。
THANKS FOR WATCHING
感谢您的观看
刚体质心的距离。
实例三:刚体定点运动的速度合成
要点一
总结词
要点二
详细描述
刚体定点运动是指刚体上某一点绕定点转动的情况,其上 任意一点的速度合成需要考虑到定点和转动轴的影响。
在刚体定点运动中,任意一点P的速度合成包括绕定点转动 的线速度和由于刚体转动而产生的向心加速度。线速度的 大小等于刚体角速度乘以点P到定点的距离,向心加速度的 大小等于刚体角速度的平方乘以点P到定点的距离。同时, 由于刚体的转动,点P还会产生一个与转动轴垂直的离心加 速度,其大小等于角速度的平方乘以点P到转动轴的距离。
点的加速度合成定理
2
rM rO'
O
r'
z'
k' j'
y'
drM y + x O xi i y j z k =r j z k dt = ve v r va =
i'
x'
O' y
d 2 rM aa = 2 = r O x i y j z k dt + xi yj zk y ) i k + 2( x j z y ) i k ae ar 2( x j z
8.3 点的加速度合成定理 va ve vr
即:动点在某一瞬时的绝对速度等于它在该瞬时的牵连速度 与相对速度的矢量和。这就是点的速度合成定理。
aa ae a r ?
8.3 点的加速度合成定理
一、当牵连运动是定轴转动时,动系
i, j, k
(2) 动点相对于动参考系的运动,称为相对运动;
(3) 动参考系相对于定参考系的运动,称为牵连运动。
8.1 相对运动· 牵连运动· 绝对运动
定参考系
牵连运动
动参考系
动点
一点、二系、三运动
8.1 相对运动· 牵连运动· 绝对运动
(1) 动点相对于定参考系的速度、加速度和轨迹, 称为动点的绝对速度va、绝对加速度aa和绝对轨迹。 (2) 动点相对于动参考系的速度、加速度和轨迹, 称为动点的相对速度vr、相对加速度ar和相对轨迹 。 由于动参考系的运动是刚体的运动而不是一个点 的运动,所以除非动参考系作平动,否则其上各点的 运动都不完全相同。因为动参考系与动点直接相关的 是动参考系上与动点相重合的那一点 ( 牵连点 ) ,因此 定义:
rM rO'
O
r'
z'
k' j'
y'
drM y + x O xi i y j z k =r j z k dt = ve v r va =
i'
x'
O' y
d 2 rM aa = 2 = r O x i y j z k dt + xi yj zk y ) i k + 2( x j z y ) i k ae ar 2( x j z
8.3 点的加速度合成定理 va ve vr
即:动点在某一瞬时的绝对速度等于它在该瞬时的牵连速度 与相对速度的矢量和。这就是点的速度合成定理。
aa ae a r ?
8.3 点的加速度合成定理
一、当牵连运动是定轴转动时,动系
i, j, k
(2) 动点相对于动参考系的运动,称为相对运动;
(3) 动参考系相对于定参考系的运动,称为牵连运动。
8.1 相对运动· 牵连运动· 绝对运动
定参考系
牵连运动
动参考系
动点
一点、二系、三运动
8.1 相对运动· 牵连运动· 绝对运动
(1) 动点相对于定参考系的速度、加速度和轨迹, 称为动点的绝对速度va、绝对加速度aa和绝对轨迹。 (2) 动点相对于动参考系的速度、加速度和轨迹, 称为动点的相对速度vr、相对加速度ar和相对轨迹 。 由于动参考系的运动是刚体的运动而不是一个点 的运动,所以除非动参考系作平动,否则其上各点的 运动都不完全相同。因为动参考系与动点直接相关的 是动参考系上与动点相重合的那一点 ( 牵连点 ) ,因此 定义:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MM ′ lim t = va t →0
MM 1 lim t = ve t →0
M 1M ′ MM 2 = lim lim t t →0 t = vr t →0
9.2
点 的 速 度 合
于是可得: 于是可得:
M2
B
va ve
M′
B′
va = ve + vr
vr
M
M1
A
A′
即:动点在某一瞬时的绝对速度等于它在该 瞬时的牵连速度与相对速度的矢量和。 瞬时的牵连速度与相对速度的矢量和。这就 是点的速度合成定理。 点的速度合成定理。
例2
9.2
点 的 速 度 合
x′ ω ve = 180 × 0.083 = 15m / s = 54km / s R
vA 45 × 103 ω= = = 0.083rad / s y′ R 3600 ×150 O
vA
vB A vr 2 B
ve
vr 2 = v + v = 80.72km / h
2 B 2 e
例2
9.2
点 的 速 度 合
如图车A沿半径为150m vA 的圆弧道路以匀速vA = 45km h 行驶, vB O 车B沿直线道路以匀速 vB = 60km h B A R 行驶 ,两车相距30m,求:(1) A车相对B车的速度;(2)B车相 对A车的速度。 解:(1)以车A为动点,静系取在地面上, 动系取在车B上。动点的速度合成矢量图如图。 由图可得:
下面研究点的绝对速度、 下面研究点的绝对速度、牵连速度和相对速 9.2 度的关系。 点 度的关系。 B M ′ B′ M2 如图,由图中矢量关系可得: 如图,由图中矢量关系可得: 的
速 度 合
MM ′ = MM 1 + M 1M ′
将上式两端同除 t ,并
M
M1
A
A′
令 t → 0 ,取极限,得 取极限, MM ′ MM 1 M 1M ′ lim t = lim t + lim t t →0 t →0 t →0 由速度的定义: 由速度的定义:
于是有:
v2 D v 1 α B
va = ve1 + vr1
(1)
v1 A
ve1
va
2
α
v2
M vr 1
D v 1 B
以小环M为动点,静系取在地面上,动系取在 CD杆上,动点的速度合成矢量图如图。 于是有:a
va = ve 2 + ve1
(2)
v1 A v2
ve 2
ve 54 sin α 2 = = = 0.669 vr 2 80.72
α 2 = 42
强调牵连运动为转动
例3
9.2
点 的 速 度 合
水平直杆AB在半径为r的固定圆环上以匀 速 u 竖直下落,如图。试求套在该直杆和圆环交 点处的小环M的速度。 解:以小环M为动点,静系 取在地面上,动系取在AB杆上, 动点的速度合成矢量图如图。 A
于是可得: 即:
1 2 vM = va = v + v = v + 2 (v1 cos α v2 ) sin α 1 2 = v12 + v2 2v1v2 cos α sin α
2 e1 2 r1 2 1
本节结束
例2
9.2
点 的 速 度 合
2 2 2 vr1 = v A + ve2 = v A + vB = 75km / h O v A 45 sin α1 = = = 0 .6 vr1 75 R
ve
vA
A
vr y ′
vB B
x′
α1 = 36.9
(2)以车B为动点,静系取在地面上,动系取 在车A上。动点的速度合成矢量图如图。
v2 D v 1 vr 2 α B
M
v2 ve1 va D v1 ve 2 αvr 2 B M vr 1
ξ
C
比较(1)、(2)式,可得:
ve1 + vr1 = ve 2 + vr 2
建立如图的投影轴,将上 式投影到投影轴上,得:
v1 A v2
C
例6
9.2
点 的 速 度 合
ve1 cos α + vr1 sin α = ve 2 1 1 vr 1 = (ve1 cos α ve 2 ) = (v1 cos α v2 ) sin α sin α
A
B
ωvr o
va v e
α
C R
解:以凸轮圆心C为动点,静系取在地面上, 动系取在顶杆上,动点的速度合成矢量图如图。 由图可得:
2 ve = va cos α = eω cos 45 = eω 2
例6
v 两直杆分别以 v1 、 2 的速度 v 9.2 1 点 沿垂直于杆的方向平动,其交 A M 的 角为α ,求套在两直杆上的小 v2 C 速 环M的速度。 解:以小环M为动点,静系取在地面上,动系 度 取在AB杆上,动点的速度合成矢量图如图。 v
vr
O
va
A
ve
va = ve ctg = v0 ctg vr = vetg = v0tg
牵连点:轮上的 点 牵连点:轮上的A点
例5
9.2
点 的 速 度 合
图示平底顶杆凸轮机构,顶 杆AB可沿导轨上下平动,偏心凸 轮以等角速度ω 绕O轴转动,O轴 位于顶杆的轴线上,工作时顶杆 的平底始终接触凸轮表面,设凸 轮半径为R,偏心距OC=e ,OC 与水平线的夹角为α ,试求当 = 45 α 时,顶杆AB的速度。
u
由图可得:
O
M vr B
rv
e
va
u
ve u = va = sin sin
例4
9.2
点 的 速
如图半径为R的半圆形凸轮以匀速 v0 沿水平轨 道运动,带动顶杆AB沿铅垂滑槽滑动,求在图示位 置时,杆AB的速度。
B
度 合
解:以杆端A为动点,静系 取在地面上,动系取在凸轮上, 动点的速度合成矢量图如图。 v0 由图可得:
MM 1 lim t = ve t →0
M 1M ′ MM 2 = lim lim t t →0 t = vr t →0
9.2
点 的 速 度 合
于是可得: 于是可得:
M2
B
va ve
M′
B′
va = ve + vr
vr
M
M1
A
A′
即:动点在某一瞬时的绝对速度等于它在该 瞬时的牵连速度与相对速度的矢量和。 瞬时的牵连速度与相对速度的矢量和。这就 是点的速度合成定理。 点的速度合成定理。
例2
9.2
点 的 速 度 合
x′ ω ve = 180 × 0.083 = 15m / s = 54km / s R
vA 45 × 103 ω= = = 0.083rad / s y′ R 3600 ×150 O
vA
vB A vr 2 B
ve
vr 2 = v + v = 80.72km / h
2 B 2 e
例2
9.2
点 的 速 度 合
如图车A沿半径为150m vA 的圆弧道路以匀速vA = 45km h 行驶, vB O 车B沿直线道路以匀速 vB = 60km h B A R 行驶 ,两车相距30m,求:(1) A车相对B车的速度;(2)B车相 对A车的速度。 解:(1)以车A为动点,静系取在地面上, 动系取在车B上。动点的速度合成矢量图如图。 由图可得:
下面研究点的绝对速度、 下面研究点的绝对速度、牵连速度和相对速 9.2 度的关系。 点 度的关系。 B M ′ B′ M2 如图,由图中矢量关系可得: 如图,由图中矢量关系可得: 的
速 度 合
MM ′ = MM 1 + M 1M ′
将上式两端同除 t ,并
M
M1
A
A′
令 t → 0 ,取极限,得 取极限, MM ′ MM 1 M 1M ′ lim t = lim t + lim t t →0 t →0 t →0 由速度的定义: 由速度的定义:
于是有:
v2 D v 1 α B
va = ve1 + vr1
(1)
v1 A
ve1
va
2
α
v2
M vr 1
D v 1 B
以小环M为动点,静系取在地面上,动系取在 CD杆上,动点的速度合成矢量图如图。 于是有:a
va = ve 2 + ve1
(2)
v1 A v2
ve 2
ve 54 sin α 2 = = = 0.669 vr 2 80.72
α 2 = 42
强调牵连运动为转动
例3
9.2
点 的 速 度 合
水平直杆AB在半径为r的固定圆环上以匀 速 u 竖直下落,如图。试求套在该直杆和圆环交 点处的小环M的速度。 解:以小环M为动点,静系 取在地面上,动系取在AB杆上, 动点的速度合成矢量图如图。 A
于是可得: 即:
1 2 vM = va = v + v = v + 2 (v1 cos α v2 ) sin α 1 2 = v12 + v2 2v1v2 cos α sin α
2 e1 2 r1 2 1
本节结束
例2
9.2
点 的 速 度 合
2 2 2 vr1 = v A + ve2 = v A + vB = 75km / h O v A 45 sin α1 = = = 0 .6 vr1 75 R
ve
vA
A
vr y ′
vB B
x′
α1 = 36.9
(2)以车B为动点,静系取在地面上,动系取 在车A上。动点的速度合成矢量图如图。
v2 D v 1 vr 2 α B
M
v2 ve1 va D v1 ve 2 αvr 2 B M vr 1
ξ
C
比较(1)、(2)式,可得:
ve1 + vr1 = ve 2 + vr 2
建立如图的投影轴,将上 式投影到投影轴上,得:
v1 A v2
C
例6
9.2
点 的 速 度 合
ve1 cos α + vr1 sin α = ve 2 1 1 vr 1 = (ve1 cos α ve 2 ) = (v1 cos α v2 ) sin α sin α
A
B
ωvr o
va v e
α
C R
解:以凸轮圆心C为动点,静系取在地面上, 动系取在顶杆上,动点的速度合成矢量图如图。 由图可得:
2 ve = va cos α = eω cos 45 = eω 2
例6
v 两直杆分别以 v1 、 2 的速度 v 9.2 1 点 沿垂直于杆的方向平动,其交 A M 的 角为α ,求套在两直杆上的小 v2 C 速 环M的速度。 解:以小环M为动点,静系取在地面上,动系 度 取在AB杆上,动点的速度合成矢量图如图。 v
vr
O
va
A
ve
va = ve ctg = v0 ctg vr = vetg = v0tg
牵连点:轮上的 点 牵连点:轮上的A点
例5
9.2
点 的 速 度 合
图示平底顶杆凸轮机构,顶 杆AB可沿导轨上下平动,偏心凸 轮以等角速度ω 绕O轴转动,O轴 位于顶杆的轴线上,工作时顶杆 的平底始终接触凸轮表面,设凸 轮半径为R,偏心距OC=e ,OC 与水平线的夹角为α ,试求当 = 45 α 时,顶杆AB的速度。
u
由图可得:
O
M vr B
rv
e
va
u
ve u = va = sin sin
例4
9.2
点 的 速
如图半径为R的半圆形凸轮以匀速 v0 沿水平轨 道运动,带动顶杆AB沿铅垂滑槽滑动,求在图示位 置时,杆AB的速度。
B
度 合
解:以杆端A为动点,静系 取在地面上,动系取在凸轮上, 动点的速度合成矢量图如图。 v0 由图可得: