智能控制导论实验报告(2015) (zm)
智能控制实验报告模板

智能控制实验报告模板1. 引言在本次智能控制实验中,我们研究了智能控制的基本概念和应用。
通过实际操作,我们深入了解了智能控制系统的原理和设计方法。
本报告将详细介绍我们在实验中所进行的步骤、实验结果分析以及我们的总结和思考。
2. 实验目的本次实验的主要目的是探索智能控制系统的工作原理、学习其基本概念以及了解在实际应用中的方法。
具体目标如下:1. 熟悉智能控制的基本原理和概念;2. 了解智能控制系统的硬件和软件设计;3. 实践并掌握智能控制系统的参数调整和优化方法。
3. 实验步骤3.1 硬件搭建我们首先根据实验要求搭建了智能控制系统的硬件平台。
这个平台包括传感器、执行器和控制器等组件。
我们按照指导书的要求连接各个模块,并确保它们能够正常工作。
3.2 软件配置在硬件搭建完成后,我们开始进行软件配置。
我们根据实验要求,通过软件工具对智能控制系统进行编程,设置不同的控制策略和参数调整方法。
3.3 实验数据采集一切就绪后,我们开始采集实验数据。
通过传感器测量和执行器反馈,我们得到了系统运行过程中的各种参数和状态。
这些数据将用于后续的分析和优化。
3.4 参数调整与优化根据实验数据,我们对智能控制系统进行参数调整与优化。
我们通过反复试验,观察系统响应并调整参数,以达到最优控制效果。
4. 实验结果与分析我们根据实验数据和分析对比,得出以下实验结果与分析:1. 实验结果A- 数据分析A1- 结果评价A22. 实验结果B- 数据分析B1- 结果评价B2通过实验数据和分析,我们发现实验结果A 表现较好,系统响应稳定,控制效果较好。
而实验结果B 则存在一些问题,需要进一步优化。
5. 总结与思考通过本次智能控制实验,我们深入了解了智能控制系统的原理和设计方法。
在实验过程中,我们掌握了智能控制系统的搭建、参数调整与优化等关键技术。
通过对实验结果的分析,我们对智能控制系统的优势和应用范围有了更深入的理解。
然而,本次实验也存在一些问题和不足之处。
智能控制专业实习报告

一、实习背景随着科技的飞速发展,智能化技术在各个领域的应用日益广泛。
为了更好地将所学理论知识与实践相结合,提升自己的专业素养和实际操作能力,我选择了智能控制专业进行为期一个月的实习。
本次实习地点为XX科技有限公司,该公司主要从事智能控制系统的研究、开发和生产。
二、实习目的1. 了解智能控制技术的基本原理和应用领域;2. 掌握智能控制系统的设计、调试和维护方法;3. 培养团队协作和沟通能力;4. 提高自己的实际操作能力和解决问题的能力。
三、实习内容1. 智能控制技术基础知识学习在实习初期,我重点学习了智能控制技术的基本原理和应用领域。
通过查阅资料、请教导师和同事,我对以下内容有了更深入的了解:(1)智能控制技术的基本概念和分类;(2)常见智能控制算法,如PID控制、模糊控制、神经网络控制等;(3)智能控制系统在工业、农业、医疗、家居等领域的应用。
2. 智能控制系统设计在实习过程中,我参与了多个智能控制系统的设计项目。
以下是我所参与的几个项目:(1)基于PLC的智能控制系统设计:该项目旨在利用PLC实现对工业生产过程的自动化控制。
我负责编写PLC程序,实现系统的控制逻辑和功能。
(2)基于模糊控制的智能家居系统设计:该项目旨在利用模糊控制算法实现对家庭环境的智能调节。
我负责设计模糊控制器,实现对空调、灯光、窗帘等设备的控制。
(3)基于神经网络的智能机器人控制系统设计:该项目旨在利用神经网络算法实现对机器人运动的智能控制。
我负责设计神经网络控制器,实现对机器人行走、避障等动作的控制。
3. 智能控制系统调试与维护在完成系统设计后,我参与了系统的调试和维护工作。
以下是我所参与的主要工作:(1)根据设计文档,对系统进行硬件和软件的调试,确保系统正常运行;(2)对系统进行性能优化,提高系统的稳定性和可靠性;(3)对系统进行定期维护,确保系统长期稳定运行。
4. 团队协作与沟通在实习过程中,我积极参与团队讨论,与同事共同解决问题。
智能控制实习报告2000字

智能控制实习报告2000字英文回答:Smart Control Internship Report.Abstract.This report presents the internship experience gained at [Company Name] from [Start Date] to [End Date]. The internship focused on the development and implementation of smart control systems for various applications. This report summarizes the key tasks undertaken, the technologies utilized, and the challenges faced during the internship.Introduction.Smart control systems leverage advanced technologies like artificial intelligence, machine learning, and the Internet of Things (IoT) to automate processes, optimize performance, and enhance decision-making. My internshipprovided hands-on experience in the design, development, and deployment of such systems.Key Tasks.Developed and implemented control algorithms for HVAC systems, aiming to improve energy efficiency and thermal comfort.Designed and built IoT-based sensors and actuators for remote monitoring and control of industrial equipment.Utilized machine learning techniques to analyze data and identify patterns for predictive maintenance.Collaborated with cross-functional teams to integrate smart control systems into existing infrastructure.Technologies Utilized.Python, C++, and MATLAB for programming.IoT platforms such as Arduino and Raspberry Pi for hardware interfacing.Machine learning libraries like TensorFlow and scikit-learn for data analysis.Cloud platforms like AWS and Azure for data storage and processing.Challenges Faced.Balancing complex algorithms with real-time performance requirements.Interfacing with legacy systems and ensuring compatibility.Addressing security concerns and implementing robust authentication mechanisms.Outcome.The internship provided valuable experience in thefield of smart control systems. I gained proficiency in various technologies, developed problem-solving skills, and improved my communication and teamwork abilities. The project outcomes contributed to the company's efforts to enhance operational efficiency and optimize resource utilization.Conclusion.The internship at [Company Name] was a rewarding experience that equipped me with the skills and knowledge necessary to succeed in the field of smart control systems.I am grateful for the opportunity to have worked on real-world projects and to have made meaningful contributions to the company's success.中文回答:智能控制实习报告。
智能控制实习实践报告
一、实习背景随着科技的飞速发展,智能控制技术已经广泛应用于各个领域,成为推动社会进步的重要力量。
为了更好地了解智能控制技术,提高自身的实践能力,我于近期参加了智能控制实习实践。
本次实习在一家知名智能控制系统研发公司进行,实习期间,我深入了解了智能控制系统的设计、开发与应用,收获颇丰。
二、实习目的1. 熟悉智能控制系统的基本原理和组成;2. 掌握智能控制系统的设计、开发与调试方法;3. 培养实际动手能力,提高团队协作精神;4. 了解智能控制系统在各个领域的应用。
三、实习内容1. 理论学习实习初期,我通过阅读相关书籍、资料,了解了智能控制系统的基本概念、发展历程、分类及特点。
同时,我还学习了常见智能控制算法,如PID控制、模糊控制、神经网络控制等。
2. 实践操作在实习过程中,我参与了以下实践操作:(1)智能控制系统硬件平台搭建:根据项目需求,选择合适的传感器、执行器、控制器等硬件设备,进行电路设计、焊接、调试,完成硬件平台搭建。
(2)软件编程:使用C/C++、Python等编程语言,根据项目需求,编写控制算法程序,实现智能控制系统的功能。
(3)系统集成与调试:将硬件平台与软件程序相结合,进行系统集成,并进行调试,确保系统稳定运行。
(4)智能控制系统应用:将所学知识应用于实际项目中,如智能家居、机器人控制、自动化生产线等。
3. 项目参与在实习期间,我参与了公司的一个智能控制系统研发项目。
项目涉及多个方面,包括需求分析、系统设计、编程实现、调试与优化等。
通过参与项目,我了解了项目管理的流程,提高了自己的团队协作能力。
四、实习成果1. 理论知识方面:通过实习,我对智能控制系统的基本原理、组成、算法有了更深入的了解,为今后的学习和工作打下了坚实的基础。
2. 实践能力方面:在实习过程中,我学会了硬件平台搭建、软件编程、系统集成与调试等实际操作技能,提高了自己的动手能力。
3. 团队协作方面:在项目参与过程中,我学会了与他人沟通、协作,提高了自己的团队协作能力。
智能控制技术的实习报告

实习报告智能控制技术实习报告一、实习背景随着科技的不断发展,智能控制技术在各个领域的应用越来越广泛。
为了更好地了解智能控制技术的发展和应用,提高自己的实践能力,我参加了为期一个月的智能控制技术实习。
实习期间,我在导师的指导下,进行了智能控制系统的设计、仿真和实验,对智能控制技术有了更深入的了解。
二、实习内容1. 理论学习在实习的开始,导师为我讲解了智能控制技术的基本概念、原理和常用算法。
我学习了模糊控制、神经网络控制、自适应控制等几种常见的智能控制方法,并了解了它们在实际工程中的应用。
2. 系统设计根据实习任务,我需要设计一个智能控制系统。
在导师的指导下,我首先确定了系统的目标和需求,然后选择了合适的控制算法,最后设计了系统的整体结构。
在设计过程中,我学习了如何根据系统需求选择合适的硬件和软件,并掌握了部分编程技巧。
3. 仿真与实验为了验证所设计的智能控制系统的有效性,我使用了MATLAB软件对系统进行了仿真。
通过调整参数和算法,我成功地实现了对系统的控制。
接着,我在实验室进行了实际实验,通过与传统控制系统的对比,验证了智能控制系统的优越性。
4. 实习总结与反思通过实习,我深刻地体会到了智能控制技术在实际工程中的重要性。
与传统控制技术相比,智能控制系统具有更好的自适应性和鲁棒性,能够更好地应对复杂的工业现场环境。
同时,我也认识到智能控制技术仍存在一些问题和挑战,如算法复杂度高、实时性要求高等。
在实习过程中,我学到了很多关于智能控制技术的知识和技能,也提高了自己的实践能力。
然而,我也意识到自己在某些方面仍有不足,如对某些算法的理解和应用不够深入,编程能力有待提高等。
在今后的学习和工作中,我将继续努力,不断提高自己的综合素质,为将来的工作做好准备。
三、实习收获通过这次实习,我对智能控制技术有了更深入的了解,掌握了相关算法和仿真技巧。
同时,实习过程中的团队合作和问题解决能力也得到了锻炼。
总之,这次实习让我受益匪浅,对我的专业学习和未来职业发展具有重要意义。
智能控制实验报告
《智能控制》 课程实验报告实验题目:模糊控制器设计与实现 一、 实验目的1.掌握模糊控制系统的设计方法;2.比较常规控制与模糊控制的优缺点; 3.训练Matlab 程序设计能力。
二、 实验内容1.针对一个二阶系统,分别设计模糊控制器和常规控制器; 2.分别PID 控制和模糊控制两种情况下系统阶跃响应; 3.对实验结果进行对比分析。
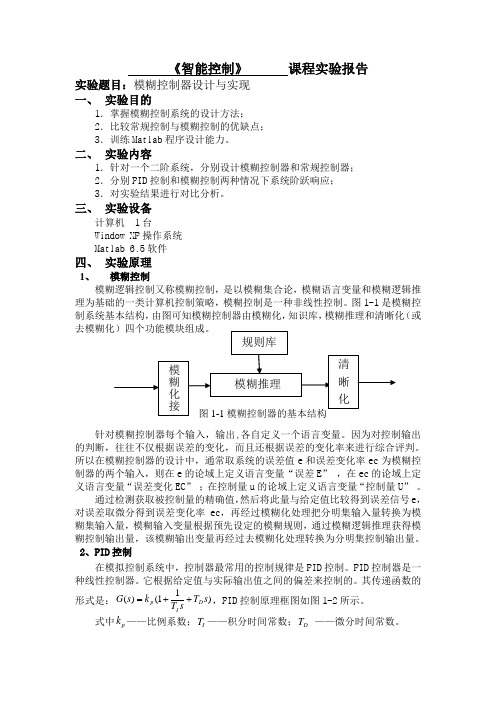
三、 实验设备计算机 1台Window XP 操作系统 Matlab 6.5软件四、 实验原理1、 模糊控制模糊逻辑控制又称模糊控制,是以模糊集合论,模糊语言变量和模糊逻辑推理为基础的一类计算机控制策略,模糊控制是一种非线性控制。
图1-1是模糊控制系统基本结构,由图可知模糊控制器由模糊化,知识库,模糊推理和清晰化(或针对模糊控制器每个输入,输出,各自定义一个语言变量。
因为对控制输出的判断,往往不仅根据误差的变化,而且还根据误差的变化率来进行综合评判。
所以在模糊控制器的设计中,通常取系统的误差值e 和误差变化率ec 为模糊控制器的两个输入,则在e 的论域上定义语言变量“误差E ” ,在ec 的论域上定义语言变量“误差变化EC ” ;在控制量u 的论域上定义语言变量“控制量U ” 。
通过检测获取被控制量的精确值,然后将此量与给定值比较得到误差信号e ,对误差取微分得到误差变化率ec ,再经过模糊化处理把分明集输入量转换为模糊集输入量,模糊输入变量根据预先设定的模糊规则,通过模糊逻辑推理获得模糊控制输出量,该模糊输出变量再经过去模糊化处理转换为分明集控制输出量。
2、PID 控制在模拟控制系统中,控制器最常用的控制规律是PID 控制。
PID 控制器是一种线性控制器。
它根据给定值与实际输出值之间的偏差来控制的。
其传递函数的形式是:)11()(s T sT k s G D I p ++=,PID 控制原理框图如图1-2所示。
式中p k ——比例系数;I T ——积分时间常数;D T ——微分时间常数。
智能控制技术实验报告
《智能控制技术》实验报告书学院:专业:学号:姓名:实验一:模糊控制与传统PID控制的性能比较一、实验目的通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。
二、实验内容本实验主要是设计一个典型环节的传统PID控制器以及模糊控制器,并对他们的控制性能进行比较。
主要涉及自控原理、计算机仿真、智能控制、模糊控制等知识。
通常的工业过程可以等效成二阶系统加上一些典型的非线性环节,如死区、饱和、纯延迟等。
这里,我们假设系统为:H(s)=20e0.02s/(1.6s2+4.4s+1) 控制执行机构具有0.07的死区和0.7的饱和区,取样时间间隔T=0.01。
设计系统的模糊控制,并与传统的PID控制的性能进行比较。
三、实验原理、方法和手段1.实验原理:1)对典型二阶环节,根据传统PID控制,设计PID控制器,选择合适的PID 控制器参数k p、k i、k d;2)根据模糊控制规则,编写模糊控制器。
2.实验方法和手段:1)在PID控制仿真中,经过仔细选择,我们取k p=5,k i=0.1,k d=0.001;2)在模糊控制仿真中,我们取k e=60,k i=0.01,k d=2.5,k u=0.8;3)模糊控制器的输出为:u= k u×fuzzy(k e×e, k d×e’)-k i×∫edt其中积分项用于消除控制系统的稳态误差。
4)模糊控制规则如表1-1所示:在MATLAB程序中,Nd用于表示系统的纯延迟(Nd=t d/T),umin用于表示控制的死区电平,umax用于表示饱和电平。
当Nd=0时,表示系统不存在纯延迟。
5)根据上述给定内容,编写PID控制器、模糊控制器的MATLAB仿真程序,并记录仿真结果,对结果进行分析。
智能控制专业实训报告
一、前言随着科技的飞速发展,智能控制技术已成为推动我国工业自动化、信息化进程的关键技术。
为了提高学生的实践能力,培养适应社会需求的高素质技术人才,我校智能控制专业特组织学生进行为期两周的实训。
本次实训旨在让学生深入理解智能控制理论,掌握实际应用技能,为今后的职业生涯打下坚实基础。
二、实训目的与意义1. 目的(1)加深对智能控制理论的理解,提高理论联系实际的能力;(2)掌握智能控制系统的设计与实现方法;(3)培养动手能力和创新意识;(4)提高团队协作和沟通能力。
2. 意义(1)提高学生的实践能力和综合素质;(2)增强学生对智能控制行业的认识,为就业奠定基础;(3)促进学校与企业合作,实现资源共享;(4)推动智能控制技术的发展与应用。
三、实训内容与过程1. 实训内容(1)智能控制系统的基本原理;(2)智能控制系统的设计与实现;(3)智能控制系统的调试与优化;(4)智能控制系统的应用案例分析。
2. 实训过程(1)实训准备:学生分组,每组选出一个组长,明确分工,制定实训计划。
(2)理论学习:教师讲解智能控制系统的基本原理、设计方法及调试技巧。
(3)实践操作:学生根据所学知识,完成以下任务:①设计一个简单的智能控制系统;②实现该系统的硬件搭建和编程;③对系统进行调试和优化;④撰写实训报告。
(4)成果展示:每组进行成果展示,分享实训过程中的心得体会。
四、实训成果与收获1. 成果(1)完成了一个简单的智能控制系统设计;(2)掌握了智能控制系统的硬件搭建和编程方法;(3)提高了团队协作和沟通能力;(4)撰写了实训报告。
2. 收获(1)加深了对智能控制理论的理解,提高了理论联系实际的能力;(2)掌握了智能控制系统的设计与实现方法;(3)培养了动手能力和创新意识;(4)提高了团队协作和沟通能力。
五、总结本次智能控制专业实训取得了圆满成功。
通过实训,学生不仅掌握了智能控制系统的设计与实现方法,还提高了团队协作和沟通能力。
智能控制实习报告
一、实习背景随着科技的飞速发展,智能控制技术在各个领域得到了广泛应用。
为了更好地了解智能控制技术,提高自己的实践能力,我参加了为期一个月的智能控制实习。
实习期间,我深入了解了智能控制的基本原理、应用领域和实际操作,收获颇丰。
二、实习目的1. 理解智能控制的基本概念和原理;2. 掌握智能控制系统的设计与实现方法;3. 提高动手能力和团队协作精神;4. 培养创新意识和解决问题的能力。
三、实习内容1. 智能控制基础知识学习实习期间,我首先学习了智能控制的基本概念、原理和发展历程。
了解了智能控制技术涉及的主要领域,如模糊控制、神经网络控制、遗传算法控制等。
2. 智能控制系统设计与实现在掌握了智能控制基础知识后,我开始参与智能控制系统的设计与实现。
实习过程中,我参与了以下项目:(1)基于模糊控制的智能家居系统:该系统通过模糊控制器实现对家电的智能控制,提高家居生活的舒适性和安全性。
(2)基于神经网络的图像识别系统:该系统利用神经网络实现对图像的自动识别,应用于安防、医疗等领域。
(3)基于遗传算法的路径规划系统:该系统通过遗传算法实现机器人路径规划,提高机器人移动效率。
3. 团队协作与沟通在实习过程中,我与团队成员共同讨论、解决问题,培养了团队协作精神。
同时,通过与导师、同学的沟通交流,提高了自己的沟通能力。
四、实习收获1. 理论知识与实践相结合:通过实习,我深刻体会到理论知识与实践操作的重要性,提高了自己的实践能力。
2. 技能提升:掌握了智能控制系统的设计与实现方法,为今后从事相关工作奠定了基础。
3. 团队协作能力:在团队项目中,学会了与团队成员沟通、协作,提高了自己的团队协作能力。
4. 创新意识:在解决问题过程中,不断尝试新的方法和思路,培养了创新意识。
五、实习总结通过这次智能控制实习,我对智能控制技术有了更深入的了解,提高了自己的实践能力。
在今后的学习和工作中,我将不断努力,为我国智能控制技术的发展贡献自己的力量。
智控专业实训报告总结范文
一、实训背景随着科技的飞速发展,智能化控制技术在各个领域的应用越来越广泛。
为了让学生更好地了解和掌握智能控制技术,提高实际操作能力,我们学院组织了一次为期两周的智能控制专业实训。
本次实训旨在通过理论学习和实践操作,使学生在智能控制领域具备一定的专业技能和实际操作经验。
二、实训目标1. 熟悉智能控制系统的基本原理和组成;2. 掌握智能控制系统的设计方法和实现步骤;3. 学会使用常用智能控制设备和软件;4. 提高学生分析问题和解决问题的能力;5. 培养学生的团队合作精神和创新意识。
三、实训内容1. 智能控制系统基本原理:介绍了智能控制系统的定义、分类、组成及工作原理,使学生了解智能控制系统的基本概念。
2. 智能控制算法:学习了常用的智能控制算法,如PID控制、模糊控制、神经网络控制等,并分析了这些算法的特点和应用场合。
3. 智能控制系统设计:通过实例讲解了智能控制系统的设计方法,包括系统需求分析、系统结构设计、控制器设计、执行机构设计等。
4. 智能控制设备与软件:介绍了常用智能控制设备和软件,如PLC、变频器、触摸屏等,并讲解了如何使用这些设备与软件进行系统调试。
5. 实践操作:学生分组进行实践操作,分别完成以下任务:(1)设计并实现一个简单的智能控制系统;(2)对现有智能控制系统进行优化;(3)分析并解决实际问题。
四、实训过程1. 理论学习:通过课堂讲解、自学等方式,使学生掌握智能控制系统的基本知识和常用算法。
2. 实践操作:学生在实验室进行实践操作,分组完成实训任务。
3. 指导教师指导:实训过程中,指导教师针对学生遇到的问题进行解答和指导,确保实训顺利进行。
4. 交流与讨论:实训结束后,学生分组进行交流与讨论,分享实训心得和经验。
五、实训成果1. 学生掌握了智能控制系统的基本原理和常用算法;2. 学生具备了一定的智能控制系统设计能力;3. 学生熟悉了常用智能控制设备和软件的使用;4. 学生提高了分析问题和解决问题的能力;5. 学生培养了团队合作精神和创新意识。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《智能控制导论》上机实验报告专业班级:自动化121姓名:蒋德鹏学号:201210401117指导教师:詹跃东昆明理工大学信息工程与自动化学院自动化系2015年5月洗衣机的模糊控制系统仿真一、实验软件Matlabb/Simulink 编程语言.二、实验目的1. 熟悉智能控制系统中的建模与控制过程;2. 熟悉专家控制、模糊控制和神经网络的建模和控制算法的应用;3. 熟悉专家控制、模糊控制和神经网络的编程语言的应用。
三、需要的预备知识1. 熟悉Matlabb/Simulink 编程语言;2. 熟悉专家控制、模糊控制和神经网络建模与控制方法;3. 熟悉Matlabb/Simulink 的应用;4. 熟悉Matlabb/Simulink 常用人机接口设计。
四、实验数据及步骤1. 实验内容洗衣机的模糊控制系统仿真; 2. 实验原理模糊控制的基本原理和基本流程;基本原理:模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它从行为上模仿人的模糊推理和决策过程。
该方法首先将操作人员或专家经验编程模糊规则,然后将来自传感器的实时信号模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,将推理后得到的输出量加到执行器上。
图为模糊控制原理框图。
图一 模糊控制原理框图给定值模糊化模糊推理规则库逆模糊传感器 执行机构被控对象 精确量模糊控制器基本流程:2. 实验步骤(1)确定洗衣机模糊控制的结构如图二所示为洗衣机模糊控制推理框图。
图二 洗衣机模糊控制推理框图开始确定模糊控制器的结构定义输入、输出模糊集定义隶属函数污泥X 油脂Y 洗涤时间Z洗衣机模糊控制器建立模糊控制规则模糊推理Matlab 仿真结束首先是通过传感器检测到衣物上的各种信息,之后进行模糊化处理并确定污泥和油脂的隶属函数,再经过模糊推理和反模糊化处理最终即可得到洗涤时间。
(2)定义输入输出模糊集将污泥分为3个模糊集:SD (污泥少),MD (污泥中)LD (污泥多);将油脂分为3个模糊集:NG (油脂少),MG(油脂中),LG (油脂多);将洗涤时间分为5个模糊集:VS(很短),S (短),M (中等),L (长),VL (很长)。
(3)定义隶属函数1) 污泥隶属函数⎪⎪⎩⎪⎪⎨⎧-=⎩⎨⎧-=-==50/)50()(50/)100(50/)(50/)50()(污泥χχμχχχμχχμμLD MD SD 1005010050500500≤<≤<≤≤≤≤χχχχ采用三角隶属函数可实现污泥的模糊化。
Matlab 实现污泥隶属度函数的设计,其仿真程序为: %Define N+1 triangle membership function clear all; close all;N=2;x=0:0.1:100; for i=1:N+1f(i)=100/N*(i-1); endu=trimf(x,[f(1),f(1),f(2)]); figure(1); plot(x,u);for j=2:Nu=trimf(x,[f(j-1),f(j),f(j+1)]); hold on; plot(x,u);endu=trimf(x,[f(N),f(N+1),f(N+1)]); hold on;plot(x,u);xlabel('x');ylabel('Degree of membership');污泥程序仿真结果:2)油脂隶属函数⎪⎪⎩⎪⎪⎨⎧-=⎩⎨⎧-=-==50/)50()(50/)100(50/)(50/)50()(油脂Y Y Y Y Y Y Y LGMG NG μμμμ 1005010050500500≤<≤<≤≤≤≤Y Y Y Y采用三角形隶属函数实现油脂的模糊化。
Matlab 实现油脂隶属度函数的设计,其仿真程序为:clear all;close all; N=2;x=0:0.1:100; for i=1:N+1f(i)=100/N*(i-1); endu=trimf(x,[f(1),f(1),f(2)]);figure(1);plot(x,u);for j=2:Nu=trimf(x,[f(j-1),f(j),f(j+1)]);hold on;plot(x,u);endu=trimf(x,[f(N),f(N+1),f(N+1)]);hold on;plot(x,u);xlabel('x');ylabel('Degree of membership');油脂程序仿真结果:3)洗涤时间隶属函数⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧-=⎩⎨⎧--=⎩⎨⎧--=⎩⎨⎧-=-==20/)40()(20/)60(15/)25()(15/)40(15/)10()(15/)25(10/)(10/)10()(洗涤时间Z Z Z Z Z Z Z Z Z Z Z Z Z VL L M SVS μμμμμμ 604060404025402525102510100100≤≤≤<≤≤≤<≤≤≤<≤≤≤≤Z Z Z Z Z Z Z Z采用三角形隶属函数实现洗涤时间的模糊化,其Matlab 仿真程序如下: %Define N+1 triangle membership function clear all; close all; z=0:0.1:60;u=trimf(z,[0,0,10]); figure(1); plot(z,u);u=trimf(z,[0,10,25]); hold on; plot(z,u);u=trimf(z,[10,25,40]); hold on; plot(z,u);u=trimf(z,[25,40,60]); hold on; plot(z,u);u=trimf(z,[40,60,60]); hold on; plot(z,u);xlabel('z');ylabel('Degree of membership');洗涤时间仿真程序结果:(4)建立规则根据人的操作经验设计模糊规则,模糊规则标准:“污泥越多,油脂越多,洗涤时间越长;污泥适中,油脂适中,洗涤时间适中;污泥越少,油脂越少,洗涤时间越短”。
表一为洗衣机的模糊规则表。
表一洗衣机的模糊规则表洗涤时间Z 污泥XSD MD LD 油脂Y NG VS M LMG S M LLG M L VL(5)洗衣机模糊控制系统仿真程序%Fuzzy Control for washerclear all;close all;a=newfis('fuzz_wash');a=addvar(a,'input','x',[0,100]); %Fuzzy Staina=addmf(a,'input',1,'SD','trimf',[0,0,50]);a=addmf(a,'input',1,'MD','trimf',[0,50,100]);a=addmf(a,'input',1,'LD','trimf',[50,100,100]);a=addvar(a,'input','y',[0,100]); %Fuzzy Axungea=addmf(a,'input',2,'NG','trimf',[0,0,50]);a=addmf(a,'input',2,'MG','trimf',[0,50,100]);a=addmf(a,'input',2,'LG','trimf',[50,100,100]);a=addvar(a,'output','z',[0,60]); %Fuzzy Timea=addmf(a,'output',1,'VS','trimf',[0,0,10]);a=addmf(a,'output',1,'S','trimf',[0,10,25]);a=addmf(a,'output',1,'M','trimf',[10,25,40]);a=addmf(a,'output',1,'L','trimf',[25,40,60]);a=addmf(a,'output',1,'VL','trimf',[40,60,60]);rulelist=[1 1 1 1 1; %Edit rule base1 2 3 1 1;1 3 4 1 1;2 1 2 1 1;2 23 1 1;2 3 4 1 1;3 1 3 1 1;3 24 1 1;3 3 5 1 1];a=addrule(a,rulelist);showrule(a) %Show fuzzy rule basea1=setfis(a,'DefuzzMethod','mom'); %Defuzzywritefis(a1,'wash'); %Save to fuzzy file "wash.fis" a2=readfis('wash');figure(1);plotfis(a2);figure(2);plotmf(a,'input',1);figure(3);plotmf(a,'input',2);figure(4);plotmf(a,'output',1);ruleview('wash'); %Dynamic Simulationx=60;y=70;z=evalfis([x,y],a2) %Using fuzzy inference五、实验结果及分析(1)洗衣机控制器仿真结果如图所示,该洗衣机模糊控制系统是一个两输入一输出的系统。
两个输入分别有3个模糊化等级,因此形成九条规则。
最终采用三角形隶属函数,输出有五个模糊化等级。
(2)输入污泥和油脂的隶属函数的仿真结果。
污泥的语言值为:SD、MD、LD,油脂的语言值为:NG、MG、LG。