液压伺服系统建模的新方法
电气工程中电液伺服系统的建模与控制

电气工程中电液伺服系统的建模与控制电液伺服系统在电气工程中扮演着重要的角色,它是将电力和液压技术相结合的一种控制系统。
本文将探讨电液伺服系统的建模与控制方法,旨在帮助读者深入了解该系统的原理和应用。
1. 引言电液伺服系统是一种将电力与液压技术相结合的控制系统,它具有快速、精确以及大扭矩输出的特点,广泛应用于工业自动化领域。
该系统通常由液压执行机构、液压装置、电机、传感器以及控制器等组成。
2. 电液伺服系统的建模电液伺服系统的建模是理解系统行为和进行控制设计的重要基础。
一般来说,电液伺服系统的建模可以分为力平衡模型和压力平衡模型两种。
2.1 力平衡模型力平衡模型是基于力学平衡原理建立的,它通过分析液体在液压缸内的流动以及液压缸和负载之间的力平衡关系来描述系统行为。
该模型主要考虑了负载的机械特性以及阀门的开度对液体流量和压力的影响。
2.2 压力平衡模型压力平衡模型是基于流体的压力平衡原理建立的,它通过分析液体在液压缸内的流动以及阀门的开度对液体流量和压力的影响来描述系统行为。
该模型不考虑负载的机械特性,主要关注液体流动的特性以及阀门对压力的调节。
3. 电液伺服系统的控制电液伺服系统的控制主要包括位置控制、速度控制和力控制三种。
在控制设计中,通常使用比例积分微分(PID)控制器或模糊控制器来实现系统性能的改善。
3.1 位置控制位置控制是电液伺服系统中最常见的一种控制方式。
它通过控制液压缸的位置来实现对负载的准确控制。
在控制设计中,可以根据负载的特性选择适当的控制方法,如PID控制器或模糊控制器。
3.2 速度控制速度控制是电液伺服系统中实现对负载速度精确控制的一种方式。
在速度控制中,控制器通常根据传感器反馈的速度信号来调节液压缸的速度。
PID控制器常被用于速度控制中,通过调节比例、积分和微分参数来改善系统的响应性能。
3.3 力控制力控制是电液伺服系统中实现对负载施加特定力的控制方式。
在力控制中,控制器通常调节液压缸施加的力来满足特定的要求。
液压系统的动力学建模与控制

液压系统的动力学建模与控制液压系统是一种利用液体传输能量的技术系统,广泛应用于工业领域。
液压系统的动力学建模与控制是对液压系统进行精确描述和控制的关键技术,对于提高液压系统的效率、稳定性和可靠性具有重要意义。
本文将探讨液压系统的动力学建模与控制的相关问题。
一、液压系统的动力学特性液压系统是由液压泵、液压执行机构、阀门和管路组成的,其动力学特性主要包括质量、惯性、阻尼和刚度等因素。
液压系统中的油液是一种可压缩性较小的介质,通过液压泵的工作产生压力,驱动液压执行机构完成工作。
液压系统的动力学特性决定了其响应速度、稳定性和力/位置控制性能。
二、液压系统的动力学建模方法液压系统的动力学建模是对系统进行数学描述的过程,常用的方法有基于物理原理的大系统建模方法和基于试验数据的小系统建模方法。
大系统建模方法是通过建立液压系统的动力学方程,并求解得到系统的传递函数或状态方程。
小系统建模方法则是通过实验测量得到系统的频率响应,然后利用系统辨识技术得到其传递函数。
根据具体的应用需求和实际情况,选择合适的建模方法进行液压系统的动力学建模。
三、液压系统的动力学控制方法液压系统的控制方法主要包括开环控制和闭环控制两种。
开环控制是根据系统的输入信号和输出信号之间的关系进行控制,缺点是无法对系统的参数变化和外界干扰进行补偿。
闭环控制则是根据反馈信号对系统进行控制,能够实现对系统的稳定性和鲁棒性控制。
常见的液压系统控制方法有PID控制、模糊控制和自适应控制等。
根据具体的应用和控制要求,选择合适的控制方法进行液压系统的动力学控制。
四、液压系统的应用案例液压系统广泛应用于各个领域,如工程机械、冶金设备、航空航天等。
以工程机械为例,液压系统的动力学建模与控制能够实现对液压挖掘机、装载机等设备的精确控制。
通过对液压系统的建模,可以预测系统的性能指标、优化系统结构和参数选择。
通过对液压系统的控制,可以提高设备的工作效率、降低能耗和提升设备的可靠性。
基于AMEsim的液压系统建模与仿真
基于AMEsim的液压系统建模与仿真液压系统是工程中常见的一种动力传输系统,它通过液压传动来实现力的传递和执行机构的动作控制。
液压系统具有传动效率高、传动力矩大、动作平稳、反应灵敏等优点,因此在机械制造、航空航天、船舶、石油化工、建筑工程等领域得到了广泛应用。
为了更好地设计和优化液压系统,工程师们常常需要对液压系统进行建模与仿真分析。
AMEsim是一种基于物理的系统级建模和仿真软件,可以用来对复杂的液压系统进行建模与仿真。
它能够快速准确地模拟液压系统的动态特性,并通过仿真分析系统的运行状态、性能和参数变化对系统进行优化。
本文将介绍使用AMEsim对液压系统进行建模与仿真的步骤和方法。
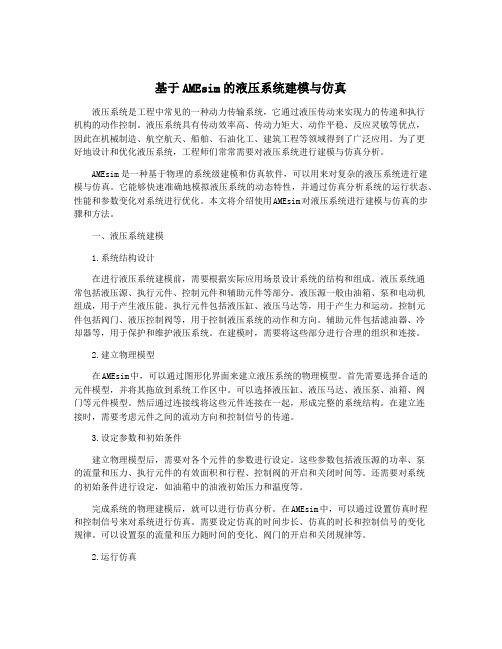
一、液压系统建模1.系统结构设计在进行液压系统建模前,需要根据实际应用场景设计系统的结构和组成。
液压系统通常包括液压源、执行元件、控制元件和辅助元件等部分。
液压源一般由油箱、泵和电动机组成,用于产生液压能。
执行元件包括液压缸、液压马达等,用于产生力和运动。
控制元件包括阀门、液压控制阀等,用于控制液压系统的动作和方向。
辅助元件包括滤油器、冷却器等,用于保护和维护液压系统。
在建模时,需要将这些部分进行合理的组织和连接。
2.建立物理模型在AMEsim中,可以通过图形化界面来建立液压系统的物理模型。
首先需要选择合适的元件模型,并将其拖放到系统工作区中。
可以选择液压缸、液压马达、液压泵、油箱、阀门等元件模型。
然后通过连接线将这些元件连接在一起,形成完整的系统结构。
在建立连接时,需要考虑元件之间的流动方向和控制信号的传递。
3.设定参数和初始条件建立物理模型后,需要对各个元件的参数进行设定。
这些参数包括液压源的功率、泵的流量和压力、执行元件的有效面积和行程、控制阀的开启和关闭时间等。
还需要对系统的初始条件进行设定,如油箱中的油液初始压力和温度等。
完成系统的物理建模后,就可以进行仿真分析。
在AMEsim中,可以通过设置仿真时程和控制信号来对系统进行仿真。
基于AMEsim的液压系统建模与仿真
基于AMEsim的液压系统建模与仿真AMEsim是一种用于液压系统建模与仿真的软件工具,它具有强大的功能和灵活的操作界面,可以有效地模拟液压系统的动态行为,并提供详细的分析和评估。
本文将介绍基于AMEsim的液压系统建模与仿真的流程和方法。
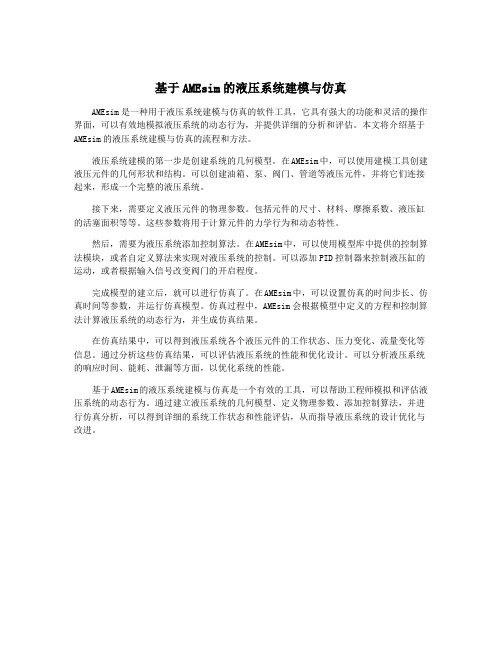
液压系统建模的第一步是创建系统的几何模型。
在AMEsim中,可以使用建模工具创建液压元件的几何形状和结构。
可以创建油箱、泵、阀门、管道等液压元件,并将它们连接起来,形成一个完整的液压系统。
接下来,需要定义液压元件的物理参数。
包括元件的尺寸、材料、摩擦系数、液压缸的活塞面积等等。
这些参数将用于计算元件的力学行为和动态特性。
然后,需要为液压系统添加控制算法。
在AMEsim中,可以使用模型库中提供的控制算法模块,或者自定义算法来实现对液压系统的控制。
可以添加PID控制器来控制液压缸的运动,或者根据输入信号改变阀门的开启程度。
完成模型的建立后,就可以进行仿真了。
在AMEsim中,可以设置仿真的时间步长、仿真时间等参数,并运行仿真模型。
仿真过程中,AMEsim会根据模型中定义的方程和控制算法计算液压系统的动态行为,并生成仿真结果。
在仿真结果中,可以得到液压系统各个液压元件的工作状态、压力变化、流量变化等信息。
通过分析这些仿真结果,可以评估液压系统的性能和优化设计。
可以分析液压系统的响应时间、能耗、泄漏等方面,以优化系统的性能。
基于AMEsim的液压系统建模与仿真是一个有效的工具,可以帮助工程师模拟和评估液压系统的动态行为。
通过建立液压系统的几何模型、定义物理参数、添加控制算法,并进行仿真分析,可以得到详细的系统工作状态和性能评估,从而指导液压系统的设计优化与改进。
液压缸位置伺服控制系统的设计与优化

液压缸位置伺服控制系统的设计与优化液压是一种广泛应用于工业领域的技术,而液压缸作为其中的重要组成部分,起到了控制和传动力的关键作用。
液压缸的位置伺服控制系统设计与优化是一个不断发展的领域,本文将从控制原理、设计方法和优化策略三个方面探讨液压缸位置伺服控制系统的发展和应用。
一、控制原理液压缸的位置伺服控制系统是基于反馈控制原理的。
该系统的目标是通过对液压油的控制,使液压缸的位置达到期望值。
控制器根据外部的输入信号和反馈信息,对液压系统进行控制和调节,以实现位置的精确控制。
在液压缸位置伺服控制系统中,主要采用的控制方式有比例控制、积分控制和微分控制。
比例控制通过调节控制信号与反馈信号之间的比例关系,使系统的响应更为迅速。
积分控制通过积分控制器对误差进行积分,以消除系统的稳态误差。
微分控制则通过微分控制器对误差的变化率进行调节,以提高系统的动态响应性能。
二、设计方法液压缸位置伺服控制系统的设计方法主要包括系统分析、参数选取、控制器设计和系统仿真等步骤。
在系统分析中,需要确定系统的目标、输入和输出,并对系统进行建模和分析。
参数选取则是根据系统的要求和性能指标,选择合适的液压元件和参数数值。
控制器设计是根据系统的特点和需求,设计出合适的控制算法和参数。
系统仿真则是通过软件模拟系统的运行和反馈信息,以评估系统的性能和稳定性。
在液压缸位置伺服控制系统的设计中,还需要考虑到系统的非线性和动态特性。
液压系统的非线性主要体现在油液的粘性、压力和温度对系统性能的影响等方面。
为了解决这些非线性问题,可以采用模糊控制、神经网络控制等方法来调节系统的响应。
而系统的动态特性则需要通过对控制系统的参数进行调节和优化,以提高系统的动态性能和稳定性。
三、优化策略液压缸位置伺服控制系统的优化策略主要包括参数优化、结构优化和控制策略优化。
参数优化是根据系统的性能指标和要求,通过试验和仿真等方法对系统的参数进行调整和优化。
结构优化是通过改变系统的结构和组件,以提高系统的性能和效率。
电液伺服系统的建模与控制

电液伺服系统的建模与控制1. 引言电液伺服系统是一种广泛应用于工业控制领域的系统,它可以通过控制液压执行器的输出来实现对机械运动的精确控制。
本文将介绍电液伺服系统的建模与控制方法,以帮助读者更好地了解和应用这一技术。
2. 电液伺服系统的概述电液伺服系统由液压执行器、电液伺服阀、传感器和控制器等组成。
液压执行器负责将液压能转化为机械能,电液伺服阀负责控制液压执行器的动作,传感器用于反馈系统状态信息,控制器根据传感器的反馈信息对电液伺服阀进行控制。
3. 电液伺服系统的建模建模是控制系统设计的第一步,对于电液伺服系统也是不可或缺的。
电液伺服系统的建模既可以基于理论模型,也可以基于实验数据进行。
3.1 理论模型在理论模型建模中,我们需要考虑液压执行器、电液伺服阀和控制器的动态特性。
液压执行器的动态特性可以用惯性、摩擦、密封等参数来描述。
电液伺服阀的动态特性可以用阀门的流量-压力特性和阀门饱和现象来描述。
控制器的动态特性通常可以用传统的PID控制算法进行建模。
3.2 实验模型在实验模型建模中,我们需要通过实验得到系统的频率响应和传递函数,并将其转化为数学模型。
这种方法对于实际系统的建模更加准确,但也需要大量的实验数据和较高的技术要求。
4. 电液伺服系统的控制控制是电液伺服系统中最关键的环节之一。
常用的电液伺服系统控制方法有位置控制、速度控制和力控制等。
4.1 位置控制位置控制是电液伺服系统中最基本的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的位置。
传感器将执行器的位置信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的位置跟踪。
4.2 速度控制速度控制是电液伺服系统中常用的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的速度。
传感器将执行器的速度信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的速度跟踪。
4.3 力控制力控制是电液伺服系统中一种高级的控制方法。
基于AMEsim的液压系统建模与仿真

基于AMEsim的液压系统建模与仿真液压系统是一种转换能源的系统,能够将机械能转换为压缩液体流体的形式,通过液压缸等执行器将压力能转换为机械能。
液压系统的主要组成部分包括液压泵、油箱、油管路、液压执行器、液压阀等。
为了对液压系统进行设计和优化,需要对系统进行建模和仿真。
本文将介绍基于AMEsim的液压系统建模与仿真方法。
步骤一:建立液压系统模型首先,需要在AMEsim中建立液压系统模型。
液压系统模型包含了各种液压元件,如液压泵、液压缸、液压阀、液压管道等,这些元件组合在一起形成了一个完整的液压系统。
在模型设计过程中,需要根据实际情况选择所需的元件,并将它们连接起来,以形成一个封闭的液压系统回路。
步骤二:定义液压系统参数在建立模型的过程中,需要定义各个液压元件的参数,如液压泵的压力、流量、效率等,液压缸的直径、行程等;并且还需要定义系统中液体的物理特性参数,如密度、粘度、压力等。
这些参数将影响系统的工作效率和性能,因此需要根据实际情况精确设置。
步骤三:进行系统仿真模型建立和液压系统参数设置完成后,就可以进行系统仿真。
仿真过程中,可以利用AMEsim提供的各种分析工具绘制系统各个位置的压力、速度、流量等参数变化曲线,以及每个关键部件的工作状态和效率等信息。
步骤四:分析仿真结果仿真结果将展示液压系统的工作状态和性能等信息。
可以通过分析仿真结果,来优化系统设计,改进液压元件选择和流体参数设置等方法,以提高液压系统的效率和性能。
总之,基于AMEsim的液压系统建模和仿真是一种非常有效的工具,可以帮助工程师深入理解液压系统的工作原理和性能,以优化设计和提高系统效果。
基于AMEsim的液压系统建模与仿真
基于AMEsim的液压系统建模与仿真AMEsim是一款应用较广泛的多领域仿真软件,可以用于机械、液压、电气、热力等领域的建模与仿真。
在液压系统方面,AMEsim可以建立液压系统的数学模型,并进行仿真验证,以使得系统设计更加精确和可靠。
下面我们将详细介绍如何使用AMEsim建立液压系统模型和进行仿真分析。
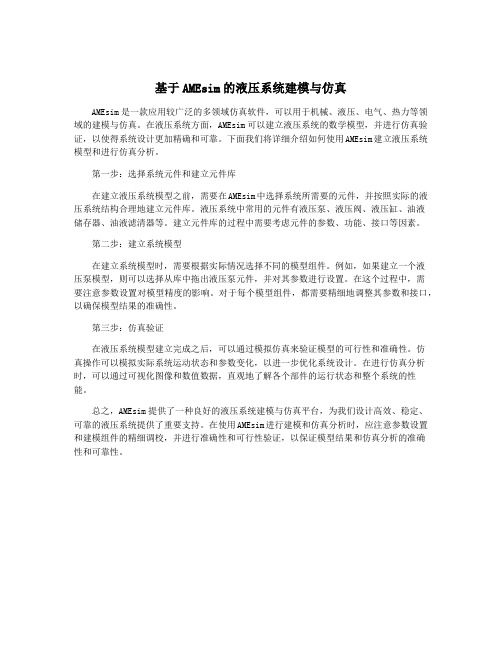
第一步:选择系统元件和建立元件库在建立液压系统模型之前,需要在AMEsim中选择系统所需要的元件,并按照实际的液压系统结构合理地建立元件库。
液压系统中常用的元件有液压泵、液压阀、液压缸、油液储存器、油液滤清器等。
建立元件库的过程中需要考虑元件的参数、功能、接口等因素。
第二步:建立系统模型在建立系统模型时,需要根据实际情况选择不同的模型组件。
例如,如果建立一个液压泵模型,则可以选择从库中拖出液压泵元件,并对其参数进行设置。
在这个过程中,需要注意参数设置对模型精度的影响。
对于每个模型组件,都需要精细地调整其参数和接口,以确保模型结果的准确性。
第三步:仿真验证在液压系统模型建立完成之后,可以通过模拟仿真来验证模型的可行性和准确性。
仿真操作可以模拟实际系统运动状态和参数变化,以进一步优化系统设计。
在进行仿真分析时,可以通过可视化图像和数值数据,直观地了解各个部件的运行状态和整个系统的性能。
总之,AMEsim提供了一种良好的液压系统建模与仿真平台,为我们设计高效、稳定、可靠的液压系统提供了重要支持。
在使用AMEsim进行建模和仿真分析时,应注意参数设置和建模组件的精细调校,并进行准确性和可行性验证,以保证模型结果和仿真分析的准确性和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
方程 ( 5) 可以表示为
y ( k) = -
i =1
∑a y ( k j
3
i) +
i =0 j =0
βx ( k ∑∑
ij j
3
m
i)
( 9)
初始化 , 也可以采用读取数据文件 ( 见下文) 的方法对状态向 量初始化 。 采样时间设定 ts = 0 . 01 s , 输入量分别为 y ( k 1) , y ( k - 2) , y ( k - 3) , v ( k ) , v ( k - 1) , v ( k - 2) , v ( k - 3) ,
网络权值可以由估计值 β 01 , …,β 3 m 利用下式计算得出
n n
根据将辨识 出
2
i
β w ^j = ∑ ^ ij^ bi /
i =0
i =0
b ∑^
( 21)
来的参数 p 由 ( 19) ,
( 20) , ( 21) 式经过计
3 仿真研究及结果
本文用 Matlab/ Simulink 中的 S Function 模块 [3 ] 实现了上 述辨识器的编程仿真 。 用 S Function 对上述辨识过程进行编 程时 , 由于变量迭代是离散形式的 , 所以我们首先根据需要 确定离散状态变量的个数 。 在上述算法中 , 由于 p , P , q ,λ都 进行了迭代 , 所以为了在迭代时取得前一时刻的值需要将它
v = w0 v ( k )Байду номын сангаас+
j =1
∑wφ( |
j
v ( k ) - cj | )
2
( 4)
0
f 2 ( v)
其中 , m 是隐层神经元的个数 ,φ( r) = 综合方程 ( 3) 和 ( 4) 得 :
y ( k) = 3
r 1 exp 2 ; 2λ λ 2π
0 > U2 > v
v、 v 分别为伺服阀的输入和输出 。 实际伺服系统的线性部分
[1 ] 孙文质 . 液压控制系统 [M] . 国防工业出版社 ,19951 [2 ] 王永骥 ,涂健 . 神经元网络 [M] . 机械工业出版社 ,19991 [3 ] 蒙以正 ,柳成茂 . MAT LAB 5. X 应用技巧 [M] . 科学出版社 ,19991
黄镇海 (1976 - ) , 男 ( 汉族 ) , 江西人 , 在读硕士 , 主
2 针对液压伺服系统设计带 RBF 神经网络的辨识
所示) 用以代替该对象的死区非线性部分 , 对液压伺服系统 数学模型进行了辨识 。 由该图可以看出辨识所需要的样本数 据为给定激励信号 v 和实际输出信号 y , 输出信号在实际中 比较容易测量 。 我们利用 RBF 神经网络的输出层具有线性映射关系的 性质 ,用一个单输入 / 单输出的 RBF 神经网络来代替伺服阀 静态非线性环节 , 于是可以将 v 写成 :
算求出 ai , bi , wi 。 再 将 wi 代入 RBF 神经 网络中 , 用 y = x 的 信号 作 为 输 入 信 号 , 可以得到伺服 阀的死区非线性特
图 4 辨识神经网络输出的 伺服阀死区非线性特性
— 54
—
性 , 如图 4 所示 。
作者简介 臧怀泉 (1963 - ) ,男 ( 汉族) , 黑龙江齐齐哈尔人 , 教
裴福俊 (1976 - ) , 男 ( 汉族) , 河北人 , 在读硕士 , 主要研究领域为液
压伺服系统智能控制 。
A Ne w Method for Modeling the Hydraulic Servo System
ZANG Huaiquan ,HUANG Zhen - hai , YIN Ru - po ,FANG Yi - ming ,PEI Fu - jun
( Institute of electrical engineer , Yanshan University ,Qinhuangdao Hebei 066004 ,China) ABSTRACT :It is difficult to measure the flow of the valve of the hydraulic servo system , and so we are difficult to model the non - linear valve by measuring. we design an identifier with an artificial neural network , in this identifier we use the priori knowledge of this hydraulic sys2 tem and use a RBF neural network to instead the model of the non - linear dead zone. A standard recursive least - squares algorithm is used to estimate the parameters of the identifier. The identifier is fulfilled by programming S- Function module in the Matlab/ simulink at last. The sim2 ulation shows that the identifier can overcome the problem of modeling the hydraulic system. KEYWORDS :Neural network ; Hydraulic servo system ;non - linear dead zone ; Identification
m
器
根 据 已 有 的 知 识 [1 ] ,液压伺服系统的 数学模型可以描述为一 个静态死区非线性和线
图1 液压伺服系统结构简图
性部分串连 ,电液伺服系统简化结构图如图 1 所示 。 其中 ,伺服阀静态非线性特性可以用以下方程来描述
f 1 ( v) v = v > U1 > 0 U1 ≥ v ≥ U2 ( 1)
-1 1 + a1 z + a2 z + a3 z Y( z ) = -1 v(z ) b0 + b1 z - 1 + b2 z - 2 + b3 z - 3
-1
-2
-3
( 2)
电液伺服系统的离散模型输入 / 输出关系如下式表示 :
y ( k) = -
i =1
∑a y ( k i
3
i) +
i =0
但是方程 ( 9) 是参数未知的线性方程 , 为方便应用辨识算法 , 将以上方程改写为
y ( k) = m T ( k - 1) p + ε( k) ( 10)
辨识误差ε ^ ( k + 1) , 故输入个数 Sizes. NumIutputs = 8 ,输出个 数 Sizes. NumOutputs = 1 。 在该算法的实现过程中 , 用 sys =
mdlUpdate (t ,x ,u) 函 数 实 现 变 量 的 迭 代 , 用 sys = mdlOutputs (t ,x ,u) 实现辨识器的输出 。
其中 : m T ( k ) = [ y ( k - 1) , …, y ( k - 3) , x0 ( k ) , …,
x0 ( k - 3) , …, xm ( k) , …, xm ( k - 3) ]
3
ε( k) 是误差序列 , 代表白噪声 。 利用标准 RLS 算法进行辨识式 ( 10) 中的参数 [ 2 ] , 用如下 的调整规则 : ^ p ( k + 1) = ^ p ( k ) + q ( k + 1)ε ^ ( k + 1) q ( k + 1) =
P( k) m ( k + 1) 1 + m T ( k + 1) P ( k ) m ( k + 1)
T p = [ - a1 , …, - a3 ,β 00 , …,β 30 , …,β 0 m , …,β 3m ]
对液 压 伺 服 系 统 进 行 辨 识 , 给 定 位 置 信 号 y =
( 11) ( 12)
λ的初值取随机值时 , 系统实际输出信 5 sin ( 5 t ) , 当 ^ p、 P、 q、 号和辨识输出信号如图 3 ( a) 所示 , 可以看出跟踪过程中有跳 变现象 。 当我们将图 3 ( a) 中在 8 秒后的某一刻的值记录下来 后 , 作为下一次辨识的初始值 。 由于我们在辨识过程中用到 的矩阵维数较大 , 使得处理的数据量较大 , 所以我们在仿真 过程中采用存文件的方式来保存数据和读取文件的方式来 初始化变量的方法 。 这样我们在第二次辨识时得到了很好的 跟踪曲线 , 见图 3 ( b) , 同时也证明了第一次辨识结果的正确 性。
T
( 13) ( 14) ( 15)
ε ^ ( k + 1) = y ( k + 1) - m ( k + 1) ^ p ( k)
1 P ( k + 1) = λ [ P( k) - q ( k + 1) m T ( k + 1) P( k) ] ( 16) k
λ k = 1 -
T 2 m ( k) P ( k - 1) m ( k) T tr ( P ( 0) ) ( 1 + m ( k) P ( k - 1) m ( k ) )
离散化模型如下 :
i =1
∑a y ( k i
m
3
i) +
i =0