阀控非对称缸液压伺服系统建模与仿真分析
基于SIMULINK的阀控非对称液压缸系统的研究

中图分类号:THl37.8
文献标识码:A
文章编号:1672—8904(2008}01—0003-003
1引 言
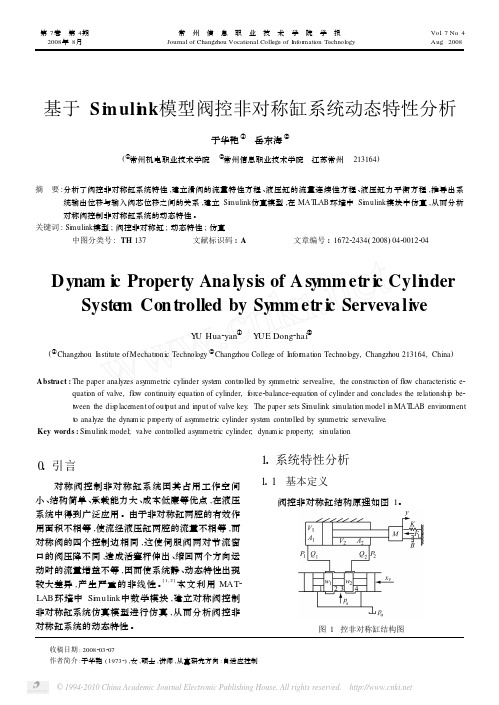
在现代化工业生产中,非对称液压缸具有占用 空间小、加工密封简单、制造成本低等的优点,因而 在一些精度要求不太高的场合得到了广泛的应用。 笔者在建立阀控非对称液压缸的数学模型的基础 上,引入了闭环PID位置控制,并利用MATLAB中 的SIMULINK模块库仿真与分析研究其控制性能。
效作用面积之差导致了液压缸活塞杆外伸与内缩
时一些参数的改变,因此,应分别对液压缸活塞杆
外伸与内缩进行分析研究(本文仅以活塞杆外伸为
例进行了仿真分析,有关活塞杆内缩的情况读者可 根据下述方法自行设计仿真,在此不再赘述)。在这
一液压伺服系统中,我们尝试从阀的负载压力一流
量特性、油缸负载流量方程和液压缸的力方程三方
综上所述的结论,搭建系统的SIMULINK模型 如图4所示。由于系统外负载力为不定参量,所以 可用随机模块来表示。为了能更好地说明系统的准 确性,系统仿真过程中分别使用了正弦信号、阶跃 信号以及方波信号作为系统的输入信号来进行系 统的仿真,其仿真结果如图5、图6、×104
控
图3阀控非对称液压缸控制系统方框图
4仿真
‘。 ‘。~i根据式(4)所得公式代入表(1)所示数据并经
整理得:
Y—.
1.66x106
U
s3+8.23s2+9604s
Y
一0.00083s一0.0067
凡
s3+8.2382+9604s
本文中,我们采用的是增量式PID控制器。在
设计该控制器的过程中,我们对控制器的比例系数 K,,积分系数Ki以及微分系数Kd进行了调节,从 而提高了系统的稳定性、响应速度、超调量以及稳 态精度。在研究过程中,我们采用试凑法选取了 Kp=0.020、Ki=O.003以及Kd=O.00 1。
长行程阀控非对称缸建模分析

第1 ( 期 总第 2 期 ) 0
20 0 7年 1 月
赢体钴动 控副
Fu d o rTrn m/so n nt l li P we a s sin a d Co r o
No1Sr lN .0 . ei o ) ( a 2
J n,0 7 a. 0 2
长 行 程 阀控 非对 称 缸 建模 分 析
肖志权 邢继 峰 朱石 坚
湖北武汉 403 ) 30 3
(海军工程大学船 舶与动力学 院
摘要 : 考虑缸压 缩性 流量并重新定义负载流量和负载压力 的基础上 , 在 建立 了长行程 阀控非对 称缸数学模 型 , 包含 正、 反两个方 向的表达式。模型中引入的等 效容积 函数是缸两腔等效容积 ( 或活塞位置 ) 的函数 , 映活塞 在长 行程 反 中不 同位置对阀控缸 性能的影 响。分析 了新模型 的意义以及对于研究长行程 阀控非对称缸 的动态特性 的作用。最
能带来功率不匹配及输 出力定义等问题【 在两个 羽,
收稿 日期 :0 6 0 — 8 20 — 9 2
方 向上 重新 定义 负载 流量 g 和 负载 压力 P 为
作者简介 : 肖志权 , 在站博士后。
维普资讯
2 0
’
赢体钴劲 控副
,
27 第1 0年 期 0
A 2
正 向 -O q-  ̄ I 1 ——p 18 2 ,rq , 一 p 2 —p
A1 A 1 A 2 1
() 1
反 向 < ,Lq ,I 2 O q- 2 一——p: 一 — 1 p 1 — p 2
£
() 2
中间位置不一定是最危险位置 ) ,因此时考虑上述
前
液压系统建模与仿真分析课程设计 (2)

液压系统建模与仿真分析课程设计一、引言液压系统作为一种常见的动力传递方式,在机械领域得到了广泛的应用。
在设计和开发液压系统时,充分了解系统的特性和性能至关重要。
因此,液压系统建模与仿真分析是机械工程领域的重要学科之一,本文介绍了液压系统建模与仿真分析的课程设计。
二、液压系统建模2.1 液压系统的基本组成部分液压系统包括液压泵、液压缸、液压阀等多个组成部分。
在液压系统中,液压泵将机械能转化为液压能,经过一系列管路和元件转换后,再将液压能转化为机械能,从而完成机械运动。
2.2 液压系统的建模方式液压系统的建模方式分为符号法和数值法两种。
符号法建模主要依据流量平衡和能量平衡等原理,采用符号公式的方式对系统进行表示。
数值法建模采用数值计算的方式对系统进行模拟,通过求解系统的微分方程或者差分方程来得到系统的状态。
而在实际应用中,一些较为复杂的系统往往需要采用更为高级的数值计算方法进行建模。
三、液压系统仿真分析液压系统仿真分析是指利用计算机对液压系统进行虚拟实验,预测系统的性能和行为,对系统进行优化和改进的过程。
液压系统仿真分析能为液压系统的实际应用提供参考和指导,并在系统设计和开发阶段为工程师提供更加精确和可行的方案。
3.1 液压系统的仿真分析工具常见的液压系统仿真分析工具包括MATLAB、Simulink、AMESim等。
这些仿真工具都提供了一系列的仿真库和仿真模型,可以快速地对液压系统进行建模和仿真分析。
同时,这些仿真工具也具有界面友好、数据可视化等特点,方便工程师快速分析系统的性能和行为。
3.2 液压系统仿真分析的应用液压系统仿真分析是液压系统设计和开发中的重要工具之一。
通过液压系统仿真分析,可以对系统的运行情况进行预测和评估,并在可能的情况下对系统进行优化和改进。
同时,液压系统仿真分析也能为液压系统的维护和故障排除提供重要的参考和指导。
四、液压系统建模与仿真分析的案例分析为了更好地展示液压系统建模与仿真分析的应用,本文以液压式机械手臂为例进行案例分析。
基于Simulink模型阀控非对称缸系统动态特性分析
14
常 州 信 息 职 业 技 术 学 院 学 报
2008年 8月
无杆腔 :
Q2
=
-
V2
β
e
d p2 dt
- dV2 dt
- cec p2
+ cic ( p1 - p2 )
=
-
(V20 - A2 y) β
dp2 dt
+A2
dy dt
-
cec p2
+ cic
pL )
( 13 )
Cd w xv Kc+ =
当 xv < 0时 :
ρ( 1
2 + m3 )
( ps
-
pL )
2 ( ps - pL )
Kq- = Cd w
ρ( 1
2 + m3 )
(m ps
+ pL )
( 14 ) ( 15 )
Cd w xv Kc- =
ρ( 1
2 + m3 )
(m ps
+ pL )
A1 , A2 无杆腔和有杆腔的有效作用面积 , m2 ; m
为常数 。
液压缸在稳态时总能满足力平衡方程和流量连
续性方程 :
p1 A1 - p2 A2 = FL
(2)
Q1 A1
=
Q2 A2
即
Q2
= mQ1
(3)
式中 p1 ———液压缸无杆腔的压力 , Pa;
p2 ———液压缸有杆腔的压力 , Pa;
Key words : Simulink model; valve controlled asymmetric cylinder; dynam ic p roperty; simulation
对称四通阀控非对称液压缸动态分析

2 2 建立 系统 方程 .
参数见 图 2 。
建模和仿真。在仿真计算过程中 , 考虑输入量及干
扰量的存在 ,输出结果 能直观反应 出干扰量 的影 响。本文根据某 20t 0 平板车实际数据 ,对系统 的
某些参数进行修正 ,实现转 向系统 比较理想 的控制
结果 。
图 2 对 称 四通 阀控 非对 称液压缸
维普资讯
对 称 四 通 阀控 非 对 称 液 压 缸 动 态 分 析
大 连理 工 大 学
摘
史显 忠
屈福 政
要 :转 向系统是大型平板车行驶 的核 心部件 。对 由对称 阀控非 对称 液压缸 组成 的转 向系 统 的动态特 性
进行研究 , 应用 M tb aa 所提供 的 S un 进行建模 、仿真 , l i lk mi 为转 向系统设计 提供 参考 。
Q Cl/ 。 dX : Ov ), \
’
一
( 1 )
67 —
维普资讯
维普资讯
32 建立仿真程序 ,得 出仿真结果 .
根 据 系统动 态方 程及 方块 图 ,确定 以阀芯 位 移
g 要 < 曝 阻尼系数、弹簧刚度 以及外负载等。
上系统压力曲线和液压缸位移曲线 。通过调整系统 的阻尼 ,可以得出以下结论 :在 阶跃信号输人 的前 06S . 内,由于伺 服阀芯 的瞬态滑移 ,液压缸 的运 动参数 变化较 大 ,06S . 之后 ,曲线趋 于平稳 ,此
时 ,系统 处 于稳定 工 况 。阻 尼越 大 ,振 荡越 小 ,超
()滑 阀响应 为 理想 状 态 ,阀 的 4个 节 流 口匹 1
配对 称 ;
()节流 口流动状态为紊流 ; 2 ()供油压力 P 为恒定 ( 3 恒压 ) ; ()温度和密度均为常数 ; 4 ()不考虑管路 的动态影响和沿程损失 ; 5 ()不考 虑 液压 缸 内泄 漏情 况 … 6 1。 设 2A =凡 / 1 ,负载压力 P = 1 p ," 1 L P 一n2 Q =
液压缸动力学特性的建模与仿真

液压缸动力学特性的建模与仿真液压缸是一种常见的执行元件,广泛应用于各类工业设备中。
在工程设计和优化过程中,了解液压缸的动力学特性对于提高其性能和可靠性至关重要。
本文将探讨液压缸动力学特性的建模与仿真方法。
液压缸的动力学特性是指其在工作过程中受到的力和力矩对速度、加速度和位移的影响。
建立液压缸的动力学模型可以帮助工程师更好地理解其运动规律,并据此进行优化设计。
基于这样的考虑,建模和仿真成为了研究液压缸动力学特性的重要手段。
在液压缸的建模过程中,最常用的方法是基于物理原理的方法。
这种方法通过对液压缸内部液体流动、活塞运动和密封摩擦等因素的分析,建立数学方程描述液压缸的动力学行为。
其中,液体流动方程、动量守恒方程和力矩平衡方程是建立液压缸动力学模型的重要基础。
此外,还需要考虑活塞与缸体之间的摩擦力和液压系统的非理想性等因素。
建立液压缸动力学模型的另一个重要问题是选择适当的仿真工具。
目前,常用的仿真软件有MATLAB/Simulink、LabVIEW和AMESim等。
这些软件具有强大的仿真功能和友好的用户界面,可以同时模拟液压系统和液压缸的动力学行为。
通过这些仿真工具,工程师可以直观地观察液压缸的运动轨迹、力矩曲线和速度变化等,从而优化设计方案。
除了基于物理原理的建模方法,还有基于系统辨识的方法可以用于液压缸的动力学建模。
系统辨识是一种通过实验数据来估计系统的数学模型的方法。
在液压缸建模中,可以通过对其施加不同的输入信号,并记录输出信号的变化来进行系统辨识。
常用的系统辨识方法有ARX模型、ARMAX模型和State Space模型等。
通过系统辨识可以获得更加准确的液压缸动力学模型,进而进行仿真和优化设计。
液压缸动力学特性的仿真研究不仅有助于优化设计,还可以用于故障诊断和故障预测。
通过对液压缸的模拟仿真,可以分析其在不同工况下的性能变化,并预测潜在故障的出现。
这对于维护人员来说是非常有价值的,可以提前采取相应的维护措施,避免设备故障对生产过程造成影响。
阀控非对称缸位置系统的非线性建模

式 中 : 一Vd / v为液 压 弹 性模 量 , m2 V 为 = pd N/ ; 液压 缸腔 总容 积 , ; 为 无 杆 腔 容 积 , ; m3 V1 m3 V2为 有杆 腔容 积 , ; i 内泄 流量 , / ; m3 QL 为 m。s Qg 为外泄
【 d X  ̄2P —P )l z < 0 一C W / ( s 2/ , D
式中 : Q1为 Pl腔 流 量 , /; m s Q2为 P2腔 流 量 ,
m3s Cd 流量 系数 ; 2 /; 为 7 为节 流窗 口面积梯 度 , p X m; 为 液体 密度 ,g m3z k / ; 为 阀芯位 移 , 定义 向右 为 m, 正 方 向. 2 液 压缸 连续 性方 程为 )
压缸 活塞 所受 外干 扰力 .
为 了方便 系统 原理性 方程 的建 立 , 如下 假设 : 做
① 4个 节流 窗 口是 匹配而且 对 称 的 ; 节 流窗 口处 ② 的流 动为 紊流 , 液体 压缩 性 的影 响在 阀中予 以忽 略 ; ③ 每个 相应工 作 腔 的各 点压 力相 同 , 液温 度 和容 油 积弹性模 数 可 以认 为 是 常 数 ; 油 源 供 油 压 力 恒 ④ 定 , 回油 压力 为零 . 且 由于伺服 阀与 液压 缸之 间连接
免 了分段带来 的问题 , 型 中参 量 均 为 实 际物理 量 , 模
j d  ̄2P —P )P ≥ 0 /( s 1/, c
l C w  ̄2P1一P )p, < 0 ,、 dx /( T/ z
非对称缸系统精确建模方法研究

非对称缸系统精确建模方法研究赵周礼1,周恩涛1,周士昌1,李 文2,王少丹2(1 东北大学机械工程与自动化学院,辽宁沈阳110004;2 宝钢股份公司设备部)摘要:本文以卷取机助卷辊电液伺服系统为例,推导出非对称缸电液伺服系统非线性状态方程模型,仿真结果表明该模型精确有效。
关键词:非对称缸系统;状态方程;建模0 引言由于非对称液压缸占用空间小,加工、密封比较简单,制造成本也较低廉等优点,因此在液压伺服系统中被广泛地采用。
但是,非对称液压缸两腔的作用面积不等,正是结构上的非对称性导致该系统正反两个方向上的动、静态特性不相同,相应的数学模型也不相同。
为了建立非对称缸系统的数学模型,常规的做法是对系统的一些环节作了简化,建立了近似的传递函数数学模型[1][2]。
文献[3]针对液压缸活塞杆正反两个运动方向,采用分别建模的方法,建立相对准确的数学模型,但给系统仿真带来一些困难。
本文以卷取机助卷辊电液伺服系统为例,推导出非对称缸电液伺服系统非线性状态方程模型,并利用四阶龙门库达法求解该微分方程,仿真结果表明该模型精确有效。
1 电液比例阀2 压力传感器3 位移传感器4 伺服液压缸5 侧导板6 卷筒图1 助卷辊电液伺服系统示意图1 系统结构介绍图1为某卷取机助卷辊电液伺服系统的示意图。
助卷辊的各种工作方式是依靠电液伺服系统来实现。
图中简单画出三个液压缸的示意图。
文中只建立1号助卷辊伺服系统的数学模型,其它可类推。
图2为阀控液压缸的原理图,图中液压阀线圈被加上正向电流,伺服液压缸向正向运动。
图2中y p 表示活塞杆的位移,B c 为活塞的粘性阻尼系数,F L 为外干扰力,m P 表示液压缸运动部件的质量,m L 表示负载惯量折算到活塞处的等效质量,A 1为液压缸无杆腔的有效面积,A 2为液压缸有杆腔的有效面积,Q 1,Q 2为流入和流出液压缸两腔的流量,p s 为供油压力,p 1、p 2为液压缸两腔的压力,p 0为回油压力,x v 为滑阀阀芯位移。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
煤矿机械CoalMineMachineryVol.32No.10
Oct.2011第32卷第10期
2011年10月
0引言随着水下机器人技术的不断发展,水下机器人的作业范围和作业水深不断增加。在恶劣的海洋环境下,要完成复杂的水下作业任务,水下机器人上搭载的机械手的作用显得尤为重要。没有机械手,
水下机器人充其量只是一个观察探测台架。目前,
水下机械手多为液压驱动关节式,主要包括线性关节和转动关节,线性关节主要依靠直线液压缸的伸缩实现有限范围内的摆动,转动关节则依靠液压马达实现有限范围的转动或连续回转,每个关节都可以通过液压伺服系统精确控制,实现机械手自身的作业动作。
阀控非对称缸是水下液压机械手的重要驱动环节,由于其结构的不对称及非线性等特点,可能产生跳跃谐振或等幅振荡,直接影响整个机械手液压伺服系统的动态特性。本文主要研究水下液压机械手线性关节的阀控非对称缸位置伺服系统,在具体分析阀控非对称缸控制特性的基础上进行动态特性的推导、建模及仿真,为各线性关节伺服控制系统的设计和分析提供参考。
1阀控非对称液压缸位置伺服系统建模以非对称液压缸为研究对象,进行动态特性分析和数学建模,系统物理模型如图1所示。图1伺服阀控非对称液压缸模型(1)伺服阀的负载压力-流量特性图1中,各物理量以箭头方向为正,以液压缸正向移动Y>0为例,伺服阀的流量方程为Q1=CdWXv2(ps-p1)/r姨=A1dydt(1)Q2=CdWXv2p2/r姨=A2dydt(2)式中Q1———液压缸无杆腔流量,m3/s;Q2———液压缸有杆腔流量,m3/s;Cd———阀的流量系数,取cd=0.7;W———窗口面积梯度,m;Xv———伺服阀位移,m;p1———伺服阀无杆腔压力,MPa;p2———伺服阀有杆腔压力,MPa;ps———油源压力,MPa;r———液压油密度,kg/m3
。
流经伺服阀2个节流窗口的流量并不等于负载流量QL,定义为
阀控非对称缸液压伺服系统建模与仿真分析李玲珑1,2,孙斌1,张奇峰1
(1.机器人学国家重点实验室中国科学院沈阳自动化研究所,沈阳110016;2.中国科学院研究生院,北京100039)摘要:结合水下液压机械手线性关节的阀控非对称缸位置伺服系统,分析了阀控非对称缸的负载压力-流量特性,建立了阀控缸流量连续性方程和液压缸的力平衡方程,推导了阀控缸位置控制系统动态特性的数学模型,只增加负载环节就可以构成新的液压伺服系统模型。采用MAT-
LAB软件对阀控缸位置控制系统进行动态特性仿真分析,验证了系统模型的正确性。
关键词:液压位置伺服控制;阀控非对称缸;仿真中图分类号:TH137.5文献标志码:A文章编号:1003-0794(2011)10-0089-03
ModelandSimulationAnalysisofAsymmetricalHydraulicCylinder
ControlledbyServo-valveLILing-long1,2,SUNBin1,ZHANGQi-feng1
(1.StateKeyLaboratoryofRobotics,ShenyangInstituteofAutomation,ChineseAcademyofSciences,Shenyang110016,China;2.GraduateSchooloftheChineseAcademyofSciences,Beijing100049,China)
Abstract:Basedonasymmetriccylinderpositionservosystemoflinearjointsofunderwaterhydraulicmanipulator,Loadpressure-fluxcharacteristicsofasymmetriccylindercontrolledbyservo-valvewasanalyzed.Fluxcontinuityequationofcylindercontrolledbyservo-valveandthebalanceequationofhydrauliccylinderwereestablished.Thedynamiccharacteristicsmathematicsmodelforpositioncontrolsystemincylindercontrolledbyservo-valvewasdeduced,anewhydraulicservocontrolsystemwouldbeobtainedthroughchangingloadbasedonthismodel.MAT-LABlanguagesoftwarewasusedtocarrythroughdynamiccharacteristicssimulationanalysisforpositioncontrolsystemincylindercontrolledbyservo-valve.Keywords:hydraulicpositionservocontrol;asymmetricalcylindercontrolledbyvalve;simulation
p1p
2
p5
A2A1V2V
1
Q2
Q
1
pr
XMBy
Ke
Fl
Y
89QL=Q1+Q22=hCdWXv(ps-pL)/r姨(3)
其中,h=(1+R)/2(1+R3)姨,R=A2/A1。
鉴于液压系统正常工作时,活塞大部分时间在稳态工作点附近微动,因此,在工作点附近泰勒级数展开,流量方程线性化为QL=KxXv-KppL(4)
式中Kx———阀流量系数,Kx=hCdWps-pLr姨;
Kp———流量-压力系数,Kp=hCdWXv
2r(ps-pL)
姨
;
pL———负载压力,pL=p1-p2R。
(2)阀控液压缸流量连续性方程
QL=CtppL+AmdYdt+Ve4bedpLdt(5)
式中Ctp———总泄漏系数;
Am———活塞平均面积,Am=A1+A22,m2
;
Ve———液压缸等效容积,Ve=2(V1+V2R2)1+R3,m3
。
(3)非对称液压缸和负载的力平衡方程p1A1-p2A2=Md2Ydt2+BydYdt+KyY+FL(6)
式中M———活塞及负载的总质量,kg;
By———活塞及负载的黏性阻尼系数,kg/s;
Ky———负载的弹簧刚度,N/m;
FL———作用在活塞上的外负载,N。
将式(6)化简可得
pL=(Md2Ydt2+BydYdt+KyY+FL)/A1(7)
(4)阀控非对称缸的位移数学模型将式(4)、式(5)和式(7)进行拉普拉斯变换,然后联立可得阀控非对称缸的位移数学模型式为
(8)2位置闭环控制系统动态特性分析(1)位置闭环控制系统传递函数在位置控制系统中,将油缸位移作为输出量时,可以忽略弹性负载,即Ke=0;另外总的系数K
t
(Kt=Kp+Ctp)很小,黏性摩擦系数By一般也很小,则
ByKt/A1<<1,忽略不计,
整个传递函数可以化简为
Y(s)=KxAmX(s)-KtAmA1(1+Ves4beKt)FL(s)s(s2wh2+2xhwhs+1)(9)
式中wh———液压固有频率,wh=4beA1AmVeM姨;
xh———
液压阻尼比
xh=KtbeM/(VeA1Am)姨+ByVe/(beMA1Am)姨/4式(9)表明,液压机械手驱动液压缸的输出位移受伺服阀开口及外负载影响,则系统模型方块图如图2所示。
图2系统模型框图结合图2的系统模型框图,对液压机械手的线性关节而言,液压机械手的关节由2个相对运动的构件采用铰接形成,将直线非对称液压缸首尾的耳环分别铰接在关节的两构件上,通过阀控非对称液压缸的伸缩实现所需要的运动角度,然后由液压缸内置传感器完成位置信息反馈。整个位置闭环控制系统原理如图3所示。整个闭环系统的环路增益为Kv=GAMPGSVGCYLGFB(10)
式中GAMP———放大器增益,mA/V;
GSV———伺服阀增益,m3/s;
GCYL———液压缸增益,m2
;
GFB———电位计反馈增益,V/m。
图3伺服位置控制系统原理1.非对称缸2.负载3.电位器4.放大器5.电液伺服阀如图2、图3所示,当外负载FL=0时,只需改变外负载就可以构成不同的伺服系统,适应不同的线性关节需求,如液压机械手肩关节左右摆动、俯仰肩关节上下俯仰、肘关节上下俯仰、腕关节上下俯仰等,均可以在此基础上进行动态分析。因此,FL=0
时液压缸阀控系统动态特性是整个线性关节位置伺服系统的核心。当外负载FL=0时,伺服阀芯开口直接决定液压缸的输出位移,整个位置闭环系统的方块图如图4所示。
图4位置闭环系统控制框图(2)位置闭环控制系统传递函数中参数的确定在液压机械手线性关节的位置闭环控制系统中,每个关节所采用的非对称液压缸、伺服阀、电位计都一样。以肩关节上下俯仰为例对参数进行初始化,液压缸无杆腔截面积A1=1.55×10-3m2,有杆腔截
Y(s)=[KxXv(s)-KtA1(1+Ves4beKt)FL(s)]/[VeMs34beA1+(MKtA1+VeBy4beA1)s2+(ByKtA1+VeKe4beA1+Am)s+KtKe
A1
]
第32卷第10期Vol.31No.10阀控非对称缸液压伺服系统建模与仿真分析———李玲珑,等
12345输入
FL(s)
Y(s)X(s)K1AmA1Vss4βsK11+KxAm
s2
1
wh2
ss+1w
h
2ξh
-+()
()
UoUf
Uf
GAMPGSF
GFB
GCYL
Kx
Am
ss2
wh2
s+1wh
2ξh-++()
+
90