信号与系统笔记.ppt汇编
(完整版)信号与系统知识要点

信号与系统知识要点第一章 信号与系统单位阶跃信号 1,0()()0,0t t u t t ε≥⎧==⎨<⎩ 单位冲激信号 ,0()0,0()1t t t t δδ∞-∞⎧∞=⎧=⎨⎪⎪≠⎩⎨⎪=⎪⎩⎰ ()()d t t dtεδ=()()t d t δττε-∞=⎰()t δ的性质:()()(0)()f t t f t δδ=000()()()()f t t t f t t t δδ-=-()()(0)f t t dt f δ∞-∞=⎰00()()()f t t t dt f t δ∞-∞-=⎰()()t t δδ=-00()[()]t t t t δδ-=-- 1()()at t aδδ=001()()t at t t a aδδ-=- 单位冲激偶信号 ()t δ'()()d t t dtδδ'=()()t t δδ''=--00()[()]t t t t δδ''-=---()0t dt δ∞-∞'=⎰ ()()td t δττδ-∞'=⎰()()(0)()(0)()f t t f t f t δδδ'''=-00000()()()()()()f t t t f t t t f t t t δδδ'''-=---()()(0)f t t dt f δ∞-∞''=-⎰00()()()f t t t dt f t δ∞-∞''-=-⎰符号函数 sgn()t1,0sgn()0,01,0t t t t >⎧⎪==⎨⎪-<⎩或 sgn()()()2()1t u t u t u t =--=-单位斜坡信号 ()r t0,0()(),0t r t tu t t t <⎧==⎨≥⎩ ()()t r t u d ττ-∞=⎰ ()()dr t u t dt =门函数 ()g t τ1,()20,t g t ττ⎧<⎪=⎨⎪⎩其他取样函数sin ()tSa t t=0sin lim ()(0)lim1t t tSa t Sa t→→=== 当 (1,2,)()0t k k Sa t π==±±=时,sin ()t Sa t dt dt tπ∞∞-∞-∞==⎰⎰sin lim 0t tt →±∞=第二章 连续时间信号与系统的时域分析1、基本信号的时域描述(1)普通信号普通信号可以用一个复指数信号统一概括,即st Ke t f =)(,+∞<<∞-t 式中ωσj s +=,K 一般为实数,也可以为复数。
信号与系统第三章PPT课件
.
它们都是傅里叶级数收敛的充分条件。相当广泛的 信号都能满足Dirichlet条件,因而用傅里叶级数表 示周期信号具有相当的普遍适用性。
几个不满足Dirichlet条件的信号
.
三.Gibbs现象 满足 Dirichlet 条件的信号,其傅里叶级数是如
• “非周期信号都可以用正弦信号的加权积分来 表示”——傅里叶的第二个主要论点
.
傅立叶分析方法的历史
古巴比伦人 “三角函数和” 描述周期性过程、预测天体运
动
1748年 欧拉 振动弦的形状是振荡模的线性组合
1753年 D·伯努利 弦的实际运动可用标准振荡模的线性组合来表示
1759年 拉格朗日 不能用三角级数来表示具有间断点的函数
x[k]h[nk]
x[k]h[n k]
k
.
对时域的任何一个信号 x ( t ) 或者 x ( n ) ,若能将其
表示为下列形式: x(t) a 1 es1 t a 2 es2 t a 3 es3 t
由于 es1t H(s1)es1t
es2t H(s2)es2t
es3t H(s3)es3t
利用齐次性与可加性,有
k
例: y(t)x(t3) ❖ 系统输入为 x(t) ej2t
系统 H(s) ? y(t) ?
H(s) h(t)estdt
❖ 系统输入为 x(t)cos(4t)cos(7t)
系统 y(t) ?
.
*问题:究竟有多大范围的信号可以用复指数信号的 线性组合来表示?
.
3.3 连续时间周期信号的傅里叶级数表示
第k次谐波 e jk 0t 的周期为
信号与系统复习课件全
(2) (b)计算零状态响应:
yzs [k ]
n
x[n]h[k
n]
u[k
]
3(
1 2
)
k
2( 1 ) k 3
u[k
]
n
u[n]
3(
1 2
)kn
2( 1 ) k n 3
u[k
-
n]
k n0
3(
1 2
)k
n
2( 1 ) k n 3
k 3(1 )kn k 2(1)kn
n0 2
CLTI系统数学模型——线性常系数微分方程,冲
激响应h(t);系统函数H(s);频率响应特性H( jw)
H (s) Yzs (s) X (s)
LT
h(t) H(s)
H ( j) H (s) |s j (系统稳定)
FT
h(t) H(j )
26
DLTI系统数学模型——线性常系数差分方程;冲
激响应h(n);系统函数H(z);频率响应特性H(ejw).
则
yzi[k ]
C1
(
1 2
)k
C2
(
1 )k 3
,k
0
代入初始条件,有:
y[1] 2C1 3C2 0
y[2] 4C1 9C2 1 C1 1/ 2, C2 1/ 3
则
yzi[k ]
1 2
(1)k 2
1 3
( 1 ) k ,k 3
0
= ( 1 )k1 (1)k1,k 0
2
3
17
n0 3
[ 3 3(1)k (1)k ]u[k] 23
完全响应: y[k] yzi[k] yzs[k]
[ 1 7 (1)k 4 (1)k ]u[k]
信号与系统期末复习ppt课件
PPT学习交流
11
例2.2-1 已知系统的传输算子H(p)= 2p/(p+3)(p+4) , 初始条件yzi(0)=1, yzi(0)2 , 试求系统的零输入
解响应。H(p)(p32)p(p4)
特征根λ1=-3, λ2=-4 零输入响应形式为
yzi(t)=C1e-3t+C2e-4t t>0 将特征根及初始条件y(0)=1, y′(0)=2代入
8
离散系统 (5) (P256,例5.2-1(1),5.2-2(1))
1) y(n)=T[x(n)]=ax(n)+b; 是非线性系统、时不变系统。
2) y(n)= ax(n)+b x(n-1)+c (6) (P257,例5.2-2(2))
1)y(n)=T[x(n)]=nx(n)。 是线性、时变系统
2)y(n)=n3x(n)
PPT学习交流
9
第二章 时域解法
重点
1)求系统的全响应的时域解法 2)卷积及其运算
PPT学习交流
10
一、 时域解法
1)用算子法解零输入响应yzi;
2)用卷积解零状态响应yzs ;
注意:1) 微分方程的算子表示法; 2) 单位冲激响应h(t) 3) 卷积的积分表示式及计算;
(1) f1(t)co 2t)s 5 c ( o 4 t)s((1-3(1))
(2) f2(t)[1c0o3ts)(2 ] (1-3(2))
PPT学习交流
5
二、系统及其性质
1、线性系统:
1)可分解性
2)零输入线性
3)零状态线性
2、时不变系统:
f( t) y ( t) f( t t0 ) y ( t t0 )
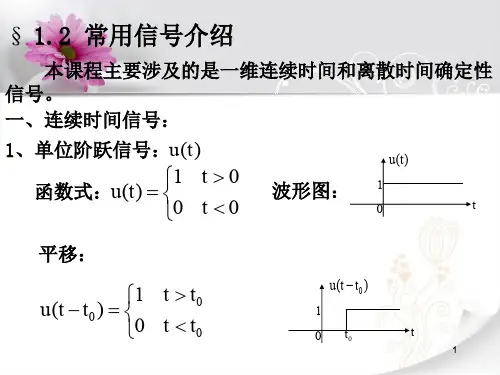
信号与系统§1-2 常用信号介绍ppt课件
d 2(t) dt 2
……
16
4、指数信号:
表示式: x(t) Aet
波形图:
x(t)
0
0
A
0
0
t
以自然常数为底的指数信号,是非常重要的基本信号。 它表示了许多自然界的客观规律,如电容中的充放电、放 射性物质的衰变等。
• 单边指数信号:
表示式: x(t) Aetu(t)
x(n)
• 单位阶跃序列的单边特性:
x(n) n 0
x(n)u(n)
0
n0
•与单位样值序列的关系:
1 2 0
12 3 4 5
n
u(n)
1 0 1 23 4 5 n
x(n)u(n)
u(n) u(n 1) (n)
n
(m) u(n)
m
u(n)
1
1 2 0
Sa(t) 1
2 2
t
以上抽样函数信号是正弦函数与反比函数的乘积表示 的,因此它是一偶对称的信。当t=0时,用此点的极限定 义,即值为1;当t=kπ(k取正负整数),由于分子为0, 函数的值等于0。
Sa(t)dt
2
Sa(t)dt
2
0
2
还有一个类似的函数,sinc(t)
n
x(n)(n) x(0)(n)
1
x(n)(n n0 ) x(n0 )(n n0 )
0
3
n
x(3) x(0)
x(n)(n) x(0) (n) x(0)
0
3
n
n
信号与系统§1-2 常用信号介绍ppt课件
0
2
25
二、离散时间信号:
1、单位样值序列: (n)
函数式:(n)
1 0
n0 n0
波形图:
(n)
1
0
n
位移:
1 (n n0 ) 0
n n0 n n0
(n n0)
1
0 n0
n
26
• 抽样性:
设有序列x(n) ,则有
x(n)
1 2 0
12 3 4 5
0
t0
t
x(t)(t t0 ) x(t0 )(t t0 )
(x(t0 )) (x(0))
0
t0
t
x(t)(t)dt x(0) (t)dt x(0)
x(t)(t t0)dt x(t0 ) (t t0 )dt x(t0 )
t
Au(t t0 ) A
0
t0
t
函数式:x(t)
A t0
[R(t)
R(t
t0
)]
Au(t
t0
)
A t0
tu(t)
A t0
(t
t0
)u(t
t0
)
Au(t
t0
)
6
? 试用单位斜变信号表示以下三角波形:
x(t)
A
0
2 t
A R(t)
A
0
A R(t )
A
1
0R
不管电阻值的大小,始终为1。
信号与系统全套课件
解答
f (t)
f (t 5)
1
时移
1
1 O 1 t 尺度 变换
f (3t)
6 5 4
t 尺度 O 变换
f (3t 5)
1 t
1O 1
33
时移
1 t
2 4 3
1.4.2 信号的变换
平移、展缩、反折相结合举例
例 已知f (t)如图所示,画出 f(-2t-4)。 解答
右移4,得f (t–4)
反转,得f (-2t–4)
1.4.2 信号的变换
2.信号的平移
将 f (t) → f (t–t0) ,称为对信号f (t)的右移
f (t) → f
其中,t0 >0
如
(t +t0), 称为对信号f t → t–1右移
(t)的左移
f (t-1)
1
f (t) 1
o1 2 t
o1 t
t → t+1左移
雷达接收到的目标回波信号就是平移信号。
1.2.2 信号的分类
1. 确定信号和随机信号
•确定性信号 可用确定的时间函数表示的信号。
对于指定的某一时刻t,有确定的函数值f(t)。
•随机信号
取值具有不确定性的信号。 如:电子系统中的起伏热噪声、雷电干扰信号。
•伪随机信号 貌似随机而遵循严格规律产生的信号(伪随机码)。
1.2.2 信号的分类
f (t)
2
1
4
- 4 - 3 - 2- 1 0 1 2 3
t
-1
-2
f (t) 2 1 - 4 - 3 - 2- 1 0 1 2 3 4 t
(a)
(b)
图5 确定性信号与随机信号
信号与系统PPT全套课件
T T
T
f (t ) dt
f (t ) dt
2
2
(1.1-1)
1 P lim T 2T
T
T
( 1.1-2 )
上两式中,被积函数都是f ( t )的绝对值平方,所以信号能量 E 和信号功率P 都是非负实数。 若信号f ( t )的能量0 < E < , 此时P = 0,则称此信号 为能量有限信号,简称能量信号(energy signal)。 若信号f ( t )的功率0 < P < , 此时E = ,则称此信 号为功率有限信号,简称功率信号(power signal)。 信号f ( t )可以是一个既非功率信号,又非能量信号, 如单位斜坡信号就是一个例子。但一个信号不可能同时既是 功率信号,又是能量信号。
1.3 系统的数学模型及其分类
1.3.1 系统的概念 什么是系统( system )?广义地说,系统是由若干相互作用 和相互依赖的事物组合而成的具有特定功能的整体。例如, 通信系统、自动控制系统、计算机网络系统、电力系统、水 利灌溉系统等。通常将施加于系统的作用称为系统的输入激 励;而将要求系统完成的功能称为系统的输出响应。 1.3.2 系统的数学模型 分析一个实际系统,首先要对实际系统建立数学模型,在数 学模型的基础上,再根据系统的初始状态和输入激励,运用 数学方法求其解答,最后又回到实际系统,对结果作出物理 解释,并赋予物理意义。所谓系统的模型是指系统物理特性 的抽象,以数学表达式或具有理想特性的符号图形来表征系 统特性。
2.连续信号和离散信号 按照函数时间取值的连续性划分,确定信号可分为连续时 间信号和离散时间信号,简称连续信号和离散信号。 连续信号( continuous signal)是指在所讨论的时间内,对 任意时刻值除若干个不连续点外都有定义的信号,通常用f ( t ) 表示。 离散信号(discrete signal)是指只在某些不连续规定的时刻 有定义,而在其它时刻没有定义的信号。通常用 f(tk) 或 f(kT) [简写 f(k )] 表示,如图1.1-2所示。图中信号 f (tk) 只在t k = -2, -1, 0, 1, 2, 3,…等离散时刻才给出函数值。
信号与系统第二版PPT
系统的稳定性分析
定义
如果一个系统在所有可能的输入下都保持稳定,则称该系 统为稳定系统。
判断方法
通过分析系统的极点和零点分布,判断系统的稳定性。如 果所有极点都位于复平面的左半部分,则系统是稳定的。
稳定性分析的重要性
稳定性是系统设计和应用的重要考虑因素,不稳定的系统 无法在实际应用中实现。
系统的频率响应分析
优点
时域分析方法直观、物理意义明 确,可以方便地处理系统的瞬态 响应和稳态响应。
缺点
对于高阶系统或复杂系统,求解 微分方程或差分方程可能变得非 常复杂。
系统的频域分析方法
定义
频域分析方法是将系统的频率特性作为研究对象,通过傅里叶变换、拉普拉斯变换等数学工具将 时间域的信号或系统转换为频域进行分析。
时不变系统
系统的特性不随时间 变化。
时变系统
系统的特性随时间变 化。
信号与系统的重要性及应用领域
重要性
信号与系统是信息传输和处理的基础, 是通信、控制、图像处理、音频处理 等领域的重要理论基础。
应用领域
信号与系统理论广泛应用于通信、雷 达、声呐、遥感、生物医学工程、自 动控制等领域。
02 信号的特性与表示方法
定义
频率响应是描述系统对不同频率输入信号的响应特性。
分析方法
通过傅里叶变换或拉普拉斯变换等方法,将时域信号转换为频域信 号,然后分析系统的频率响应特性。
频率响应的重要性
频率响应是信号处理、控制系统等领域的重要概念,通过分析频率响 应可以了解系统的性能和特性,如传递函数、带宽、相位失真等。
06 信号处理技术与应用
物联网与边缘计算在系统设计中的应用
利用物联网和边缘计算的技术,实现系统的远程监控和管理,提高系 统的可靠性和响应速度。
《信号与系统教案》课件
《信号与系统教案》PPT课件第一章:信号与系统概述1.1 信号的概念与分类信号的定义信号的分类:连续信号、离散信号、随机信号等1.2 系统的概念与分类系统的定义系统的分类:线性系统、非线性系统、时不变系统、时变系统等1.3 信号与系统的研究方法解析法数值法图形法第二章:连续信号及其运算2.1 连续信号的基本性质连续信号的定义与图形连续信号的周期性、奇偶性、能量与功率等性质2.2 连续信号的运算叠加运算卷积运算2.3 连续信号的变换傅里叶变换拉普拉斯变换Z变换第三章:离散信号及其运算3.1 离散信号的基本性质离散信号的定义与图形离散信号的周期性、奇偶性、能量与功率等性质3.2 离散信号的运算叠加运算卷积运算3.3 离散信号的变换离散时间傅里叶变换离散时间拉普拉斯变换离散时间Z变换第四章:线性时不变系统的特性4.1 线性时不变系统的定义与性质线性时不变系统的定义线性时不变系统的性质:叠加原理、时不变性等4.2 线性时不变系统的转移函数转移函数的定义与性质转移函数的绘制方法4.3 线性时不变系统的响应输入信号与系统响应的关系系统的稳态响应与瞬态响应第五章:信号与系统的应用5.1 信号处理的应用信号滤波信号采样与恢复5.2 系统控制的应用线性系统的控制原理PID控制器的设计与应用5.3 通信系统的应用模拟通信系统数字通信系统第六章:傅里叶级数6.1 傅里叶级数的概念傅里叶级数的定义傅里叶级数的使用条件6.2 傅里叶级数的展开周期信号的傅里叶级数展开非周期信号的傅里叶级数展开6.3 傅里叶级数的应用周期信号分析信号的频谱分析第七章:傅里叶变换7.1 傅里叶变换的概念傅里叶变换的定义傅里叶变换的性质7.2 傅里叶变换的运算傅里叶变换的计算方法傅里叶变换的逆变换7.3 傅里叶变换的应用信号分析与处理图像处理第八章:拉普拉斯变换8.1 拉普拉斯变换的概念拉普拉斯变换的定义拉普拉斯变换的性质8.2 拉普拉斯变换的运算拉普拉斯变换的计算方法拉普拉斯变换的逆变换8.3 拉普拉斯变换的应用控制系统分析信号的滤波与去噪第九章:Z变换9.1 Z变换的概念Z变换的定义Z变换的性质9.2 Z变换的运算Z变换的计算方法Z变换的逆变换9.3 Z变换的应用数字信号处理通信系统分析第十章:现代信号处理技术10.1 数字信号处理的概念数字信号处理的定义数字信号处理的特点10.2 现代信号处理技术快速傅里叶变换(FFT)数字滤波器设计数字信号处理的应用第十一章:随机信号与噪声11.1 随机信号的概念随机信号的定义随机信号的分类:窄带信号、宽带信号等11.2 随机信号的统计特性均值、方差、相关函数等随机信号的功率谱11.3 噪声的概念与分类噪声的定义噪声的分类:白噪声、带噪声等第十二章:线性系统理论12.1 线性系统的状态空间描述状态空间模型的定义与组成线性系统的性质与方程12.2 线性系统的传递函数传递函数的定义与性质传递函数的绘制方法12.3 线性系统的稳定性分析系统稳定性的定义与条件劳斯-赫尔维茨准则第十三章:非线性系统13.1 非线性系统的基本概念非线性系统的定义与特点非线性系统的分类13.2 非线性系统的数学模型非线性微分方程与差分方程非线性系统的相平面分析13.3 非线性系统的分析方法描述法映射法相平面法第十四章:现代控制系统14.1 现代控制系统的基本概念现代控制系统的定义与特点现代控制系统的设计方法14.2 模糊控制系统模糊控制系统的定义与原理模糊控制系统的结构与设计14.3 神经网络控制系统神经网络控制系统的定义与原理神经网络控制系统的结构与设计第十五章:信号与系统的实验与实践15.1 信号与系统的实验设备与原理信号发生器与接收器信号处理实验装置15.2 信号与系统的实验项目信号的采样与恢复实验信号滤波实验信号分析与处理实验15.3 信号与系统的实践应用通信系统的设计与实现控制系统的设计与实现重点和难点解析信号与系统的基本概念:理解信号与系统的定义、分类及其研究方法。