现代控制理论 6-3 李雅普诺夫第二法(直接法)
李雅普诺夫第二方法简介
正定函数 V(x) = Ci > 0 的等值线示意图:这是 一族闭的、层层相套的、当C趋向于零时向原点退 缩的曲线。C 1 < C 2 < C 3 < C 4 < C 5 < C 6 < C 7
C7
C6
C5
C2 C1
C4
C3
一些记号: 0 :正 定 0: 半 正 定 0 :负 定 0: 半 负 定
李雅普诺夫第二方法简介
为了分析运动的稳定性,李雅普诺夫提出了两 种方法:
第一方法包含许多步骤,包括最终用微分方程 的显式解来对稳定性近行分析,是一个间接的方法。
第二方法不是求解微分方程组,而是通过构造 所谓李雅普诺夫函数(标量函数)来直接判断运动 的稳定性,因此又称为直接法。
李雅普诺夫第二方法目前仍是研究非线性、时 变系统最有效的方法,是许多系统控制律设计的 基本工具。
0
0
则 易 于 验 证 它 是 正 定 对 称 阵 。 首 先 ,
P T P; 其次,注意到
xT P xxTeA T tQ eA td tx(eA tx)T Q (eA tx)d t
0
0
且 (eAtx)TQ(eAtx)0x0。 又 由 于 A阵 均 具 负 实 部 , 故 积 分 有 界 , P必 正 定 。 因 此 方 程 (?)成 立 。
x 1 2(t) x2 2(t) x 1 2(t0) x2 2(t0)。
例:考虑小阻尼线性振动系统:
x1 x 2 x 2 x1 x 2
研 究 其 平 衡 状 态 x 1 0 , x 2 0 的 稳 定 性 。 若 取 v(x)x1 2x2 2,则 有
v x v 1 x 1 x v 2 x 2 2 x 1 x 2 2 x 2 ( x 1 x 2 ) 2 x 2 2 0
现代控制理论第版课后习题答案
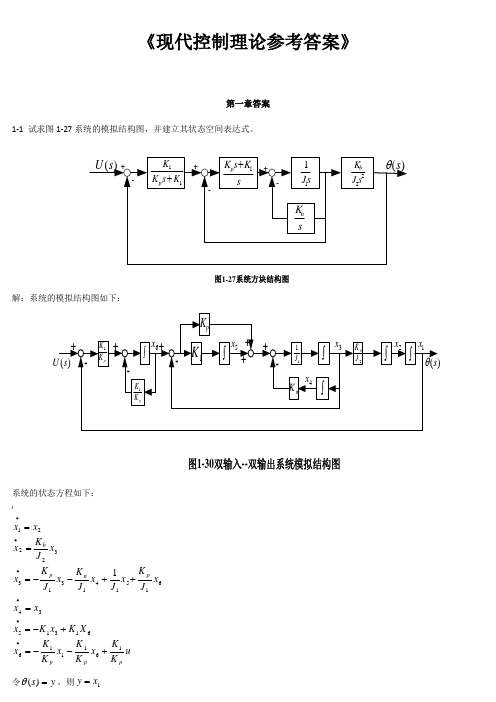
现代控制理论第版课后习题答案Prepared on 22 November 2020《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下: 1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
李雅普诺夫第二法
12/23/2012
2 V ( x) ( x1 x2 )( x1 x2 ) 2x1x1 x2 x2 ( x12 x2 )
当 x 时, ( x) ,所以系统在其原点处大范围 V 渐近稳定。
12/23/2012
4.3 李雅普诺夫第二法
x1 x1 x2 例4-8 系统的状态方程为 x2 x1 x2
,
,
可见此二次型函数是正定的,即
12/23/2012
4.3 李雅普诺夫第二法
4.3.2 几个稳定性判据 定理 设系统的状态方程为
x f ( x),
如果平衡状态 xe 0, 即, f ( xe ) 0 如果存在标量函数V(x) 满足:
1) V ( x) 对所有x具有一阶连续偏导数。 2) V ( x) 是正定的;
12/23/2012
4.3 李雅普诺夫第二法
例 设 x x1
x2
x3
T
2 1) V ( x) ( x1 x2 )2 x3
因为V(0) 0,而且对非零向量 ,有x a,a, T 0, x ( - 0) 也使V(x) 0,所以V(x)是半正定的。
2 2) V ( x) x12 x2因为V(0) 0,而且对非零向量 ,有x 0, a) 0, x ( 0, T 也使V(x) 0,所以V(x)是半正定的。
12/23/2012
4.3 李雅普诺夫第二法
2. 二次型标量函数
设 x1,x2 ,xn为n个变量, 二次型标量函数可写为
p11 p V ( x) xT Px x1 x2 xn 21 pn1 其中,P为实对称矩阵。 p12 p22 p1n x1 x2 pnn xn
现代控制理论试题详细答案
现代控制理论试题B 卷及答案一、1 系统[]210,01021x x u y x ⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦能控的状态变量个数是cvcvx ,能观测的状态变量个数是。
2试从高阶微分方程385y y y u ++=求得系统的状态方程和输出方程(4分/个)解 1. 能控的状态变量个数是2,能观测的状态变量个数是1。
状态变量个数是2。
…..(4分)2.选取状态变量1x y =,2x y =,3x y =,可得 …..….…….(1分)…..….…….(1分)写成010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦…..….…….(1分) []100y x = …..….…….(1分)二、1给出线性定常系统(1)()(),()()x k Ax k Bu k y k Cx k +=+=能控的定义。
(3分)2已知系统[]210 020,011003x x y x ⎡⎤⎢⎥==⎢⎥⎢⎥-⎣⎦,判定该系统是否完全能观?(5分)解 1.答:若存在控制向量序列(),(1),,(1)u k u k u k N ++-,时系统从第k 步的状态()x k 开始,在第N 步达到零状态,即()0x N =,其中N 是大于0的有限数,那么就称此系统在第k 步上是能控的。
若对每一个k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。
…..….…….(3分) 2.[][]320300020012 110-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=CA ………..……….(1分)[][]940300020012 3202=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=CA ……..……….(1分)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=940320110 2CA CA C U O ………………..……….(1分)rank 2O U n =<,所以该系统不完全能观……..….…….(2分)三、已知系统1、2的传递函数分别为 求两系统串联后系统的最小实现。
《现代控制理论》第3版课后习题答案
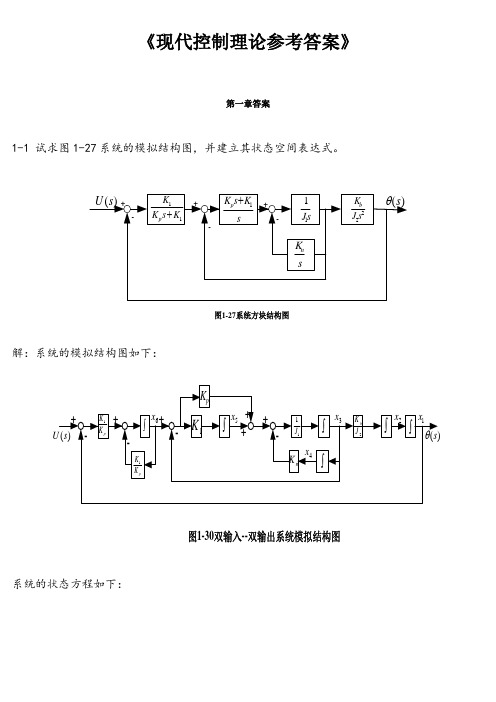
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••6543211654321111111126543210000010000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
L1L2U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下: )u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为: `[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
李雅普诺夫第二法
李雅普诺夫第二法李雅普诺夫第二法又称直接法,它是从能量观点进行稳定性分析的,它的基本思想是建立在这样一个物理事实基础之上,即:由经典力学理论可知,对于一个振动系统,如果系统的总能量随时间增长而连续减少,直到平衡状态为止,那么振动系统是稳定的。
1)渐进稳定的判据定理1设系统的状态方程为(,)x f x t =其中平衡状态为0e x =,满足(0,)0f t =,如果存在一个具有连续一阶偏导数的标量函数(,)v x t ,且满足以下条件:(1)(,)v x t 是正定的;(2)(,)vx t 是负定的。
则系统在原点处的平衡状态是一致渐进稳定的。
此外,如果当||||x →∞,有(,)v x t →∞,则在原点处的平衡状态是大范围一致渐进稳定的。
2)渐进稳定的判据定理1设系统的状态方程为(,)x f x t =其中平衡状态为(0,)0f t =,如果存在一个具有连续一阶偏导数的标量函数(,)v x t ,且满足以下条件:(1)(,)v x t 是正定的;(2)(,)vx t 是负定的。
(3)(,)v x t 在0x ≠时不恒等于零,则系统在原点处的平衡状态是大范围渐进稳定的。
3)李雅普诺夫意义下稳定的判别定理设系统的状态方程为=x f x t(,)其中平衡状态为(0,)0f t=,如果存在一个具有连续一阶偏导数的标量函数v x t,且满足以下条件:(,)(1)(,)v x t是正定的;(2)(,)是负定的。
v x t(3)则系统在原点处的平衡状态在李雅普诺夫意义下是一致稳定的。
4)不稳定的判别定理设系统的状态方程为=x f x t(,)其中平衡状态为(0,)0f t=,如果存在一个具有连续一阶偏导数的标量函数v x t,且满足以下条件:(,)(1)(,)v x t是正定的;(2)(,)是正定的。
v x t则系统在原点处的平衡状态是不稳定。
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===••••••令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制讲义8
Modern Control Theory
4.3 李雅普诺夫第二法(直接法)
基本思想
不是通过求解系统的运动方程,而是借助于 一个李雅普诺夫函数来直接对系统平衡状 态的稳定性作出判断。
*它是从能量观点进行稳定性分析的。
1、如果一个系统被激励后,其储存的能量随 着时间的推移逐渐衰减,到达平衡状态时, 能量将达到最小值,那么这个平衡状态就是 渐近稳定的。
4)
V (x) 0 V (0) 0 (或非正定)的。
x0 时, V ( x )为半负定 x0
例如: V ( x ) ( x 1 x 2 )
2
5)
x0 V ( x ) 0或 V ( x ) 0 时, V ( x )为不定的。 V (0) 0 x0
令
V ( x , t ). 0 若 x 0, V ( x , t ) 0 成立
.
李氏意义 下稳定 渐进稳定
若仅x 0, V ( x , t ) 0 成立
.
例1:已知非线性系统的状态方程为: . 2 2 x 1 x 2 x1 ( x1 x 2 ) . 2 2 x 2 x1 x 2 ( x1 x 2 ) 试用李雅普诺夫第二法判断其稳定性。 解:
.
. 则: . x1 0 , x 2 0 V ( x ) 0 . V ( x ) 负半定 其它 V (x) 0 . x1 0 令 V ( x) 0 只有全零解 x2 0
x0
非零状态时 V ( x ) 0
.
原点 x e 0 是渐进稳定,且是大范围 一致渐进稳定。 定理2
说明:x 0 V ( x , t ) 0 系统维持等 能量水平运动,使 x ( t ; x 0 , t 0 ) 维持在非零 状态而不运行至原点。 定理4:若(1) V ( x , t ) 正定; . (2) V ( x , t ) 正定 则原点是不稳定的。 . 说明:V ( x , t ) 正定 能量函数随时间增 大, ( t ; x 0 , t 0 ) 在x e 处发散。 x
现代控制理论知识点汇总
第一章控制系统的状态空间表达式1. 状态空间表达式n 阶 DuCx y Bu Ax x +=+= 1:⨯r u 1:⨯m y n n A ⨯: r n B ⨯: n m C ⨯:r m D ⨯:A 称为系统矩阵,描述系统内部状态之间的联系;B为输入(或控制)矩阵,表示输入对每个状态变量的作用情况;C 输出矩阵,表示输出与每个状态变量间的组成关系,D直接传递矩阵,表示输入对输出的直接传递关系。
2. 状态空间描述的特点①考虑了“输入-状态-输出”这一过程,它揭示了问题的本质,即输入引起了状态的变化,而状态决定了输出。
②状态方程和输出方程都是运动方程。
③状态变量个数等于系统包含的独立贮能元件的个数,n 阶系统有n 个状态变量可以选择。
④状态变量的选择不唯一。
⑤从便于控制系统的构成来说,把状态变量选为可测量或可观察的量更为合适。
⑥建立状态空间描述的步骤:a 选择状态变量;b 列写微分方程并化为状态变量的一阶微分方程组;c 将一阶微分方程组化为向量矩阵形式,即为状态空间描述。
⑦状态空间分析法是时域内的一种矩阵运算方法,特别适合于用计算机计算。
3. 模拟结构图(积分器 加法器 比例器)已知状态空间描述,绘制模拟结构图的步骤:积分器的数目应等于状态变量数,将他们画在适当的位置,每个积分器的输出表示相应的某个状态变量,然后根据状态空间表达式画出相应的加法器和比例器,最后用箭头将这些元件连接起来。
4. 状态空间表达式的建立① 由系统框图建立状态空间表达式:a 将各个环节(放大、积分、惯性等)变成相应的模拟结构图;b 每个积分器的输出选作i x ,输入则为i x;c 由模拟图写出状态方程和输出方程。
② 由系统的机理出发建立状态空间表达式:如电路系统。
通常选电容上的电压和电感上的电流作为状态变量。
利用KVL 和KCL 列微分方程,整理。
③由描述系统的输入输出动态方程式(微分方程)或传递函数,建立系统的状态空间表达式,即实现问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 2 1 2 kx1 + mx2 2 2
⎡x ⎤ x= ⎢ 1⎥ ≠0 ⎣ x2 ⎦ ⎡x ⎤ x= ⎢ 1⎥ =0 ⎣ x2 ⎦
V (x ) > 0 V (x ) = 0
前页
3
例:机械位移系统
& x (t ), x (t )
μ
m
& ⎡ x1 ⎤ ⎡ x ⎤ ⎧ x1 = x2 ⎪ x=⎢ ⎥ =⎢ ⎥ ⎨ k μ & & ⎣ x2 ⎦ ⎣ x ⎦ ⎪ x2 = − x1 − x2 m m ⎩
在零平衡状态 xe=0 的邻域内
5,
x ≠ 0,
V (x ) > 0 V (x ) = 0 V (x ) < 0
⇒ V (x ) 不定
前页
10
5
例:已知 x = [x1 x2 x3 ],确定标量函数的定号性
T
2 2 (1) V (x ) = x14 + 2 x2 + x3
解: x = 0, V (x ) = 0
下页
2 返回
1
例:机械位移系统
& x (t ), x (t )
μ
m
& m&& = −kx − μx x
1 选取 x = ⎢ ⎥ = ⎢ ⎥ & ⎣ x2 ⎦ ⎣ x ⎦
返回
⎡x ⎤
⎡ x⎤
k
& ⎧ x1 = x2 ⎪ 状态方程 ⎨ k μ & ⎪ x2 = − m x1 − m x2 ⎩
系统能量
V (x ) =
⇔ λp < 0 ⇔ λp ≤ 0
17
例:确定下列二次型的定号性。
2 2 V (x ) = x12 + 2 x2 − x3
解: V (x ) = [x1 x2
判别方法二
⎡ 1 0 0 ⎤ ⎡ x1 ⎤ x3 ]⎢ 0 2 0 ⎥ ⎢ x2 ⎥ ⎥ ⎢ ⎥⎢ ⎢ 0 0 − 1⎥ ⎢ x3 ⎥ ⎣ ⎦⎣ ⎦
24
返回
12
例:机械位移系统
& x (t ), x (t )
μ
m
& m&& = − kx − μx x
1 选取 x = ⎢ ⎥ = ⎢ ⎥ & ⎣ x2 ⎦ ⎣ x ⎦
返回
⎡x ⎤
⎡ x⎤
k
& ⎧ x1 = x2 ⎪ 状态方程 ⎨ k μ & ⎪ x2 = − m x1 − m x2 ⎩
系统能量
V (x ) =
P = PT
⎡0.5k x2 ]⎢ ⎣ ⎤ ⎡ x1 ⎤ 0.5m⎥ ⎢ x2 ⎥13 ⎦ ⎣ ⎦标量
函数
1 2 1 2 kx1 + mx2 = [x1 2 2
二次型定号性的判别方法
二次型 V(x)= xTPx 正定
⇔ ⇔
矩阵P正定 P的各阶顺序主子式>0
p11 L M O pn1 L p1n M >0 pnn
x e 渐近稳定!
首页
5
V (x ) =
1 2 1 2 kx1 + mx2 2 2
2 & V (x ) = − μx2
6
3
李雅普诺夫第二法的基本思想
求出系统的能量函数(李雅普诺夫函数)V(x, t) —— 标量函数。
& 能量衰减特性用 V (x, t ) 表示。
依据系统的运动方程(状态方程)考察能量函数 在运动过程中的变化规律。
& 2, V (x ) 负定
3, x → ∞, V (x ) → ∞ 则系统原点平衡状态为大范围(一致)渐近稳定。 前页
22
返回
11
定理3
& (线性/非线性)定常系统 x = f (x ), t ≥ 0 其中 f (0 ) = 0
如果存在具有连续一阶导数的标量函数 V (x ), V (0) = 0 1, V (x ) 正定
2 (2) V (x ) = x12 + x3
x ≠ 0, V (x ) > 0
⇒ V (x ) 正定
解: x = 0, V (x ) = 0
x1 = 0,x2 ≠ 0, x3 = 0 , V (x ) = 0
其余 V (x ) > 0
∴ x = 0, V (x ) = 0 x ≠ 0, V (x ) ≥ 0
& & & V (x ) = kx1 x1 + mx2 x2
能量不断衰减 V (x ) → 0
⎡ x ⎤ ⎡0 ⎤ x= ⎢ 1⎥→⎢ ⎥ ⎣ x2 ⎦ ⎣0 ⎦
μ ⎞ ⎛ k = kx1 x2 + mx2 ⎜ − x1 − x2 ⎟ m ⎠ ⎝ m 2 & = − μx2 x2 ≠ 0 V (x ) < 0
返回
系统能量
V (x ) =
k
1 2 1 2 kx1 + mx2 2 2
正定
2 & & & V (x ) = kx1 x1 + mx2 x2 = − μx2 = [x1
⎡0 0 ⎤ ⎡ x1 ⎤ x2 ]⎢ ⎥⎢ ⎥ ⎣ 0 − μ ⎦ ⎣ x2 ⎦
8 返回
4
一、标量函数V(x, t) 定号性
在零平衡状态 xe=0 的邻域内 3,
x ≠ 0, V (x ) ≥ 0 x = 0, V (x ) = 0
⇒ V (x ) 正半定
4,
x ≠ 0, V (x ) ≤ 0 x = 0, V (x ) = 0
⇒ V (x ) 负半定
前页 返回
9
一、标量函数V(x, t) 定号性
正定
1 2 1 2 kx1 + mx2 = [x1 2 2
⎡1 ⎢2 k x2 ]⎢ ⎢ 0 ⎣
⎤ 0 ⎥⎡ x ⎤ 1 ⎥⎢ ⎥ 1 ⎣ x2 ⎦ m⎥ 2 ⎦
25
例:机械位移系统
& x (t ), x (t )
μ
m
& ⎧ x1 = x2 ⎪ ⎨ k μ & ⎪ x2 = − m x1 − m x2 ⎩
V (x ), V (0 ) = 0 在 x ≠ 0 时满足:
1, V (x ) 正定
& 2, V (x ) 负半定 & 3, ∀x ∈ X , V (x ) ≡ 0
能量不变!
定理3
4, x → ∞, V (x ) → ∞
则系统原点平衡状态为李雅普诺夫意义下的稳定。 系统保持稳定的等幅振荡,非渐近稳定!
第六章 李雅普诺夫稳定性分析
§1 李雅普诺夫意义下的稳定性 §2 李雅普诺夫第一法(间接法) §3 李雅普诺夫第二法(直接法) §4 应用李雅普诺夫方法分析线性 定常系统的稳定性
1
不必求解微分方程,直接判断系统稳定性。 系统运动需要能量。在非零初始状态作用下的
运动过程中,若能量随时间衰减以至最终消失,则 系统迟早会达到平衡状态,即系统 渐近稳定! 反之,系统则不稳定!若能量在运动过程中不减不 增,则为李雅普诺夫意义下的稳定。
⇒ V (x ) 正半定
11
(3) V (x ) = − x12 − ( x1 + 2 x2 + x3 )
2
解: x = 0, V (x ) = 0
x1 = 0, x3 = −2 x2 ≠ 0 , V (x ) = 0
其余 V (x ) < 0
2 2 (4) V (x ) = x12 + 2 x2 − x3
∴ x = 0, V (x ) = 0 x ≠ 0, V (x ) ≤ 0
⇒ V (x ) 负半定
2 2 解: x12 + 2 x2 > x3
V (x ) > 0
V (x ) < 0
x + 2x < x
2 1 2 2
⇒ V (x ) 不定
12
2 3
6
T 二、二次型V(x)= xTPx 定号性
二次型:各项均为自变量的二次单项式的标量函数
P的各阶顺序主子式>0
⇒ V (x ) 正定
19
例:确定下列二次型为正定时,待定常数的取 值范围。
V (x ) = a1 x1 + b1 x2 + c1 x3 + 2 x1 x2 − 4 x3 x2 − 2 xx1 x2
⎡ a1 1 − 1⎤ ⎡ x1 ⎤ x3 ]⎢ 1 b1 − 2⎥ ⎢ x2 ⎥ ⎥ ⎢ ⎥⎢ ⎢− 1 − 2 c1 ⎥ ⎢ x3 ⎥ ⎣ ⎦⎣ ⎦
2 2
2
例:机械位移系统
& x (t ), x (t )
μ
m
& ⎡ x1 ⎤ ⎡ x ⎤ ⎧ x1 = x2 ⎪ x=⎢ ⎥ =⎢ ⎥ ⎨ k μ & & ⎣ x2 ⎦ ⎣ x ⎦ ⎪ x2 = − x1 − x2 m m ⎩
k
系统能量 V (x ) =
1 2 1 2 kx1 + mx2 2 2
能量随时间变化率
& 利用 V (x, t ) 和 V (x, t ) 的符号特征,判断平衡状态
稳定性。
7
一、标量函数V(x, t) 定号性
在零平衡状态 xe=0 的邻域内 1,
x ≠ 0, V (x ) > 0 x = 0, V (x ) = 0
⇒ V (x ) 正定 ⇒ V (x ) 负定
2,
x ≠ 0, V (x ) < 0 x = 0, V (x ) = 0
15 返回
二次型定号性的判别方法
二次型 V(x)= xTPx 正半定
⇔
矩阵P正半定
⇔ P的各阶顺序主子式 ≥0