自动控制 实验报告
自动控制原理实验报告

自动控制原理实验报告一、实验目的。
本实验旨在通过实际操作,加深对自动控制原理的理解,掌握PID控制器的调节方法,并验证PID控制器的性能。
二、实验原理。
PID控制器是一种常见的控制器,它由比例环节(P)、积分环节(I)和微分环节(D)三部分组成。
比例环节的作用是根据偏差的大小来调节控制量的大小;积分环节的作用是根据偏差的累积值来调节控制量的大小;微分环节的作用是根据偏差的变化率来调节控制量的大小。
PID控制器通过这三个环节的协同作用,可以实现对被控对象的精确控制。
三、实验装置。
本次实验所使用的实验装置包括PID控制器、被控对象、传感器、执行机构等。
四、实验步骤。
1. 将PID控制器与被控对象连接好,并接通电源。
2. 调节PID控制器的参数,使其逐渐接近理想状态。
3. 对被控对象施加不同的输入信号,观察PID控制器对输出信号的调节情况。
4. 根据实验结果,对PID控制器的参数进行调整,以达到最佳控制效果。
五、实验结果与分析。
经过实验,我们发现当PID控制器的比例系数较大时,控制效果会更为迅速,但会引起超调;当积分系数较大时,可以有效消除稳态误差,但会引起响应速度变慢;当微分系数较大时,可以有效抑制超调,但会引起控制系统的抖动。
因此,在实际应用中,需要根据被控对象的特性和控制要求,合理调节PID控制器的参数。
六、实验总结。
通过本次实验,我们深刻理解了PID控制器的工作原理和调节方法,加深了对自动控制原理的认识。
同时,我们也意识到在实际应用中,需要根据具体情况对PID控制器的参数进行调整,以实现最佳的控制效果。
七、实验心得。
本次实验不仅让我们在理论知识的基础上得到了实践锻炼,更重要的是让我们意识到掌握自动控制原理是非常重要的。
只有通过实际操作,我们才能更好地理解和掌握知识,提高自己的实际动手能力和解决问题的能力。
八、参考文献。
[1] 《自动控制原理》,XXX,XXX出版社,2010年。
[2] 《PID控制器调节方法》,XXX,XXX期刊,2008年。
自控综合实验报告

一、实验目的1. 理解自动控制系统的基本原理,掌握控制系统设计的基本方法。
2. 学习使用Matlab/Simulink进行控制系统仿真,验证理论分析结果。
3. 掌握PID控制原理及其参数整定方法,实现系统的稳定控制。
4. 了解采样控制系统的特性,掌握采样控制系统的设计方法。
二、实验仪器与设备1. 计算机:一台2. Matlab/Simulink软件:一套3. 控制系统实验平台:一套(含传感器、执行器、控制器等)三、实验内容1. 连续控制系统设计(1)根据给定的系统传递函数,设计一个稳定的连续控制系统。
(2)使用Matlab/Simulink进行仿真,验证理论分析结果。
(3)调整系统参数,观察系统性能的变化。
2. PID控制(1)根据给定的系统传递函数,设计一个PID控制器。
(2)使用Matlab/Simulink进行仿真,验证PID控制器的效果。
(3)调整PID参数,观察系统性能的变化。
3. 采样控制系统(1)根据给定的系统传递函数,设计一个采样控制系统。
(2)使用Matlab/Simulink进行仿真,验证采样控制系统的效果。
(3)调整采样频率和控制器参数,观察系统性能的变化。
四、实验步骤1. 连续控制系统设计(1)建立系统传递函数模型。
(2)根据系统要求,选择合适的控制器类型(如PID控制器)。
(3)设计控制器参数,使系统满足稳定性、稳态误差和动态性能等要求。
(4)使用Matlab/Simulink进行仿真,验证系统性能。
2. PID控制(1)根据系统传递函数,设计PID控制器。
(2)设置PID控制器参数,使系统满足性能要求。
(3)使用Matlab/Simulink进行仿真,验证PID控制器的效果。
(4)调整PID参数,观察系统性能的变化。
3. 采样控制系统(1)建立系统传递函数模型。
(2)根据系统要求,设计采样控制系统。
(3)设置采样频率和控制器参数,使系统满足性能要求。
(4)使用Matlab/Simulink进行仿真,验证采样控制系统的效果。
自动控制原理实验报告
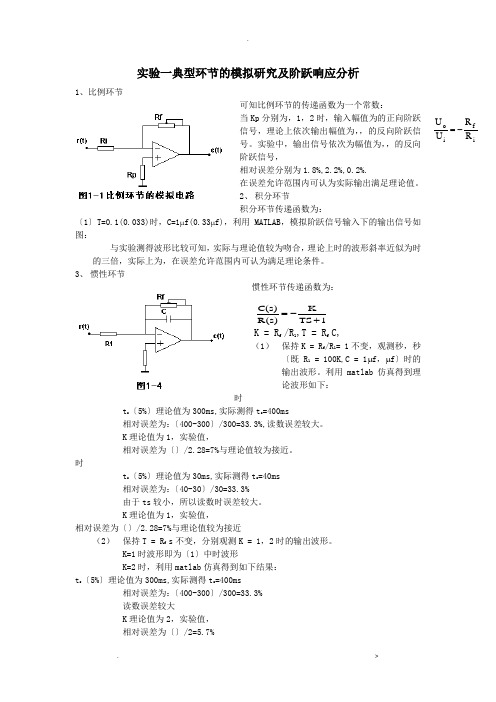
实验一典型环节的模拟研究及阶跃响应分析1、比例环节可知比例环节的传递函数为一个常数:当Kp 分别为,1,2时,输入幅值为的正向阶跃信号,理论上依次输出幅值为,,的反向阶跃信号。
实验中,输出信号依次为幅值为,,的反向阶跃信号,相对误差分别为1.8%,2.2%,0.2%.在误差允许范围内可认为实际输出满足理论值。
2、 积分环节积分环节传递函数为:〔1〕T=0.1(0.033)时,C=1μf(0.33μf),利用MATLAB ,模拟阶跃信号输入下的输出信号如图:与实验测得波形比较可知,实际与理论值较为吻合,理论上时的波形斜率近似为时的三倍,实际上为,在误差允许范围内可认为满足理论条件。
3、 惯性环节惯性环节传递函数为:K = R f /R 1,T = R f C,(1) 保持K = R f /R 1= 1不变,观测秒,秒〔既R 1 = 100K,C = 1μf ,μf 〕时的输出波形。
利用matlab 仿真得到理论波形如下:时t s 〔5%〕理论值为300ms,实际测得t s =400ms 相对误差为:〔400-300〕/300=33.3%,读数误差较大。
K 理论值为1,实验值,相对误差为〔〕/2.28=7%与理论值较为接近。
时t s 〔5%〕理论值为30ms,实际测得t s =40ms 相对误差为:〔40-30〕/30=33.3% 由于ts 较小,所以读数时误差较大。
K 理论值为1,实验值,相对误差为〔〕/2.28=7%与理论值较为接近(2) 保持T = R f s 不变,分别观测K = 1,2时的输出波形。
K=1时波形即为〔1〕中时波形K=2时,利用matlab 仿真得到如下结果:t s 〔5%〕理论值为300ms,实际测得t s =400ms相对误差为:〔400-300〕/300=33.3% 读数误差较大K 理论值为2,实验值, 相对误差为〔〕/2=5.7%if i o R RU U -=1TS K)s (R )s (C +-=与理论值较为接近。
自控实验报告实验总结
一、实验背景随着现代工业和科技的飞速发展,自动控制技术在各个领域得到了广泛应用。
为了使学生更好地理解和掌握自动控制原理及其应用,我们进行了为期两周的自控实验。
本次实验旨在通过实际操作,加深对自动控制原理的理解,提高动手实践能力。
二、实验目的1. 熟悉自动控制实验的基本原理和方法;2. 掌握控制系统时域性能指标的测量方法;3. 学会运用实验仪器进行实验操作和数据分析;4. 提高团队合作意识和解决问题的能力。
三、实验内容1. 典型环节及其阶跃响应实验本实验通过模拟电路,研究了典型环节(比例环节、积分环节、微分环节)的阶跃响应。
通过改变电路参数,分析了参数对系统性能的影响。
2. 二阶系统阶跃响应实验本实验研究了二阶系统的阶跃响应,通过改变系统的阻尼比和自然频率,分析了系统性能的变化。
3. 连续系统串联校正实验本实验研究了连续系统串联校正方法,通过调整校正装置的参数,使系统达到期望的性能指标。
4. 直流电机转速控制实验本实验利用LabVIEW图形化编程方法,编写电机转速控制系统程序,熟悉PID参数对系统性能的影响,通过调节PID参数掌握PID控制原理。
四、实验结果与分析1. 典型环节及其阶跃响应实验通过实验,我们观察到不同环节的阶跃响应曲线。
在比例环节中,随着比例系数的增加,系统的超调量减小,但调整时间增加。
在积分环节中,随着积分时间常数增大,系统的稳态误差减小,但调整时间增加。
在微分环节中,随着微分时间常数增大,系统的超调量减小,但调整时间增加。
2. 二阶系统阶跃响应实验通过实验,我们分析了二阶系统的性能。
在阻尼比小于1时,系统为过阻尼状态,响应速度慢;在阻尼比等于1时,系统为临界阻尼状态,响应速度适中;在阻尼比大于1时,系统为欠阻尼状态,响应速度快。
3. 连续系统串联校正实验通过实验,我们掌握了串联校正方法。
通过调整校正装置的参数,可以使系统达到期望的性能指标。
4. 直流电机转速控制实验通过实验,我们学会了利用LabVIEW图形化编程方法,编写电机转速控制系统程序。
自动控制原理实验报告-电机建模
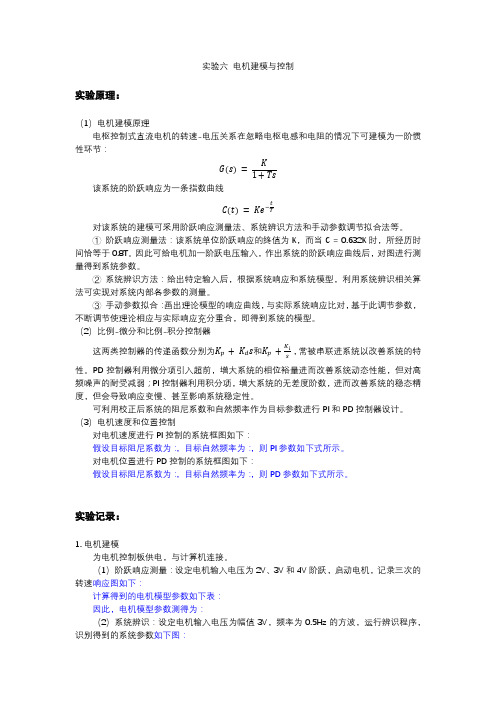
实验六电机建模与控制实验原理:(1)电机建模原理电枢控制式直流电机的转速-电压关系在忽略电枢电感和电阻的情况下可建模为一阶惯性环节:G(s)=K 1+Ts该系统的阶跃响应为一条指数曲线C(t)=Ke−t T对该系统的建模可采用阶跃响应测量法、系统辨识方法和手动参数调节拟合法等。
①阶跃响应测量法:该系统单位阶跃响应的终值为K,而当C = 0.632K时,所经历时间恰等于0.8T。
因此可给电机加一阶跃电压输入,作出系统的阶跃响应曲线后,对图进行测量得到系统参数。
②系统辨识方法:给出特定输入后,根据系统响应和系统模型,利用系统辨识相关算法可实现对系统内部各参数的测量。
③手动参数拟合:画出理论模型的响应曲线,与实际系统响应比对,基于此调节参数,不断调节使理论相应与实际响应充分重合,即得到系统的模型。
(2)比例-微分和比例-积分控制器这两类控制器的传递函数分别为K p + K d s和K p +K is,常被串联进系统以改善系统的特性。
PD控制器利用微分项引入超前,增大系统的相位裕量进而改善系统动态性能,但对高频噪声的耐受减弱;PI控制器利用积分项,增大系统的无差度阶数,进而改善系统的稳态精度,但会导致响应变慢、甚至影响系统稳定性。
可利用校正后系统的阻尼系数和自然频率作为目标参数进行PI和PD控制器设计。
(3)电机速度和位置控制对电机速度进行PI控制的系统框图如下:假设目标阻尼系数为:,目标自然频率为:,则PI参数如下式所示。
对电机位置进行PD控制的系统框图如下:假设目标阻尼系数为:,目标自然频率为:,则PD参数如下式所示。
实验记录:1.电机建模为电机控制板供电,与计算机连接。
(1)阶跃响应测量:设定电机输入电压为2V、3V和4V阶跃,启动电机,记录三次的转速响应图如下:计算得到的电机模型参数如下表:因此,电机模型参数测得为:(2)系统辨识:设定电机输入电压为幅值3V,频率为0.5Hz的方波,运行辨识程序,识别得到的系统参数如下图:(3)手动参数调节:设定输入电压为:启动电机,手动调节参数使理论模型响应与实际转速响应重合时,参数如下:2.比例-积分控制电机转速选定目标参数为:自然频率ωn= ,阻尼系数ζ = 。
自动控制原理实验
自动控制原理实验报告册实验一典型环节及其阶跃响应一、实验目的1、掌握控制模拟实验的基本原理和一般方法。
2、掌握控制系统时域性能指标的测量方法。
二、实验公式1、比例环节G(S)= -R2/R12、惯性环节G(S)= -K/TS+1 K= R2/R1, T= R2C3、积分环节G(S)= -1/TS T=RC4、微分环节G(S)= -RCS5、比例+微分环节G(S)= -K(TS+1) K= R2/R1, T= R2C6、比例+积分环节G(S)= K(1+1/TS) K= R2/R1, T=R2C三、实验结果1、比例环节阶跃波、速度波、加速度波依次为:2、惯性环节阶跃波、速度波、加速度波依次为:3、积分环节阶跃波、速度波、加速度波依次为:4、微分环节阶跃波、速度波、加速度波依次为:5、比例+微分环节阶跃波、速度波、加速度波依次为:6、比例+积分环节阶跃波、速度波、加速度波依次为:实验二二阶系统阶跃响应一、实验目的1、研究二阶系统的特征参数,阻尼比和无阻尼自然频率对系统动态性能的影响。
定量分析和与最大超调量和调节时间之间的关系。
2、进一步学习使用实验系统的使用方法。
3、学会根据系统阶跃响应曲线确定传递函数。
二、实验公式1、超调量:%=(Y MAX-Y OO)/Y OO X100%2、典型二阶系统的闭环传递函数:(S)= (1) (s)=U2(s)/U1(s)=(1/T2)/(S2+(K/T)S+1/T2) (2)式中:T=RC, K=R2/R1由(1)(2)可得: Wn=1/T=1/RCE=K/2=R2/2R1三、实验结果R1=100K、R2=50KR1=100K、R2=100KR1=100K、R2=100KR1=50K、R2=200K实验三控制系统的稳定性分析一、实验目的1、观察系统的不稳定现象。
2、研究系统开环增益和时间常数对系统稳定性的影响。
二、实验公式开环传递函数:G(S)=10K/S(0.1S+1)(TS+1)式中:K1=R3/R2 R2=100K R3=0~500K T=RC R=100K C=1uf或C=0.1uf三.实验结果第一种情况:C=1uf R3=50r3=100kr3=150kr3=200kr3=250kr3=450k第二种情况:C=0.1uf R=50kr=100k200k300k实验四系统频率特性测量一、实验目的1、加深了解系统及元件频率特性的物理概念。
自动控制原理实验报告
自动控制原理实验报告姓名:学号:班级:实验一 一、二阶系统的电子模拟及时域响应的动态测试一、 实验目的1. 了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。
2. 学习在电子模拟机上建立典型环节系统模型的方法。
3. 学习阶跃响应的测试方法。
二、 实验内容1. 建立一阶系统的电子模型,观测并记录在不同时间常数T 时的阶跃响应曲线,并测定其过渡过程时间Ts 。
2.建立二阶系统的电子模型,并记录在不同的阻尼比ζ时的阶跃响应曲线,并测定其超调量δ%及过渡过程时间Ts 。
三、 实验原理1.一阶系统系统传递函数为: 模拟运算电路如图1-1所示:图 1-1其中R1=R2,T=R2·C 其中电阻电容的具体取值见表1-12. 二阶系统系统传递函数为: 模拟运算电路如图1-2所示:图1-2其中R2·C1=1,R3·C2=1,R4/R3=ξ21各元器件具体取值如图1-2所示。
222()()()2n n nC s s R s S S ωζωωΦ==++()()()1C s Ks R s TS Φ==+四、实验数据1.一阶系统1)数据表格(取5%误差带,理论上Ts=3T)表1-1T/s 0.25 0.5 1 R2(R1)/Ω250k 500k 1MC/μF 1 1 1Ts实测/s 0.74 1.46 2.99Ts理论/s 0.75 1.5 3 阶跃响应曲线图1-3 图1-4 图1-5 2)响应曲线图1-3 (T=0.25)图1-4 (T=0.5)图1-5 (T=1)2. 二阶系统 1)数据表格表1-2说明:(1)0﹤ζ﹤1,为欠阻尼二阶系统,超调量理论计算公式2/1%100%eπζζσ--=⨯(2)取5%误差带,当ζ值较小(0﹤ζ﹤0.7)采用近似公式 进行估算;当ζ值较大(ζ﹥0.7)采用近似公式 7.145.6-=ξsT 进行估算.2)响应曲线图1-6 (ζ=0.25)ζ0.25 0.5 0.7 1.0 /rad/s 1 1 1 1 R 4/M Ω 2.0 1.0 0.7 0.5 C2/μF 1.0 1.0 1.0 1.0 σ%实测 43.77 16.24 4.00 0.02 σ%理论 44.43 16.30 4.600 Ts 实测/s 13.55 5.47 3.03 4.72 Ts 理论/s 14 7 5 4.75 阶跃响应曲线图1-6图1-7图1-8图1-9ns T ξω5.3=图1-7 (ζ=0.5)图1-8 (ζ=0.7)图1-9 (ζ=1)五、 误差分析1. 对一阶系统阶跃响应实验当T=0.25 时, 1.3%%10075.074.0-75.0=⨯=误差。
自动控制原理实验报告 (频率特性测试)
自动控制原理实验报告(三)
频率特性测试
一.实验目的
1.了解线性系统频率特性的基本概念。
2.了解和掌握对数幅频曲线和相频曲线(波德图)的构造及绘制方法。
二.实验内容及步骤
被测系统是一阶惯性的模拟电路图见图3-2-1,观测被测系统的幅频特性和相频特性,填入实验报告。
本实验将正弦波发生器(B4)单元的正弦波加于被测系统的输入端,用虚拟示波器观测被测系统的幅频特性和相频特性,了解各种正弦波输入频率的被测系统的幅频特性和相频特性。
图3-2-1 被测系统的模拟电路图
实验步骤:
(1)将函数发生器(B5)单元的正弦波输出作为系统输入。
(2)构造模拟电路。
三.实验记录:
ω
ω=1
ω=1.6
ω=3.2
ω=4.5
ω=6.4
ω=8
ω=9.6
ω=16
实验分析:
实验中,一阶惯性环节的幅频特性)(ωL ,相频特性)(ωϕ随着输入频率的变化而变化。
惯性环节的时间常数T 是表征响应特性的唯一参数,系统时间常数越小,输出相应上升的越快,同时系统的调节时间越小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验目录实验一:典型环节的模拟实验
实验二:典型系统瞬态响应和稳定性分析实验三:控制系统的频率特性
实验四:系统校正
班级 成绩:
实验一:典型环节的模拟实验
一、写出各典型环节在阶跃信号作用下的输出响应表达式(用参数表示) 1、 比例环节:
5.0)(0=+=
R
R R
s G
2、 积分环节:
C R R T S
TS s G )(,4.011)(0+===
3、 惯性环节:
C R T R
R R K S TS K s G 101,,12.05
.01)(=+=+=+=
4、 比例积分环节:
C R R T R R R K S TS K s G )(,,4.015.01)(100
1+=+=+=+
= 5、 比例微分环节:
C R R R
R T R R R R K S TS K s G 2
121021,,005.01)1()(+=++=
+=+=
6、 比例积分微分环节
S S
S T S T K s G d i p 005.001.015.01)(++=++
= 21
03211001
,)(,C R R R R R T C R R R T R R R K D i p ++=++=+=
二、 画出各典型环节实际响应曲线图和理论响应(仿真)图
1、比例环节:
2、积分环节:
3、惯性环节:
4、比例积分环节:
5、比例微分环节:
6、比例积分微分环节:
实验二:典型系统瞬态响应和稳定性分析一、当二阶系统K
,
时,填写下表
40
20
,
K
K
R100。