声发射源的定位方法
曲面和三维结构的声发射源定位方法

A B = R P- 2arccos 由式 ( 1) 和( 2 ) 解得弧长为
( 2)
A B = R arccos[ sin B1 sin B2 cos ( A 1- A 2) + cos B1 cos B2 ] ( 3) 当判断出一个声源 ( 设为 P ) 来自球面上的一个 三角形 ( 设为 v A BC ) 内部 , 设声源 P 到达 A 和 B 点的时间差为 $t 1 , 到达 C 与 A 点的时间差为 $ t 2 , 声波在球面上的传播速度为 V , 声源与 A 点的距离 为 L , 则声源位置由下面三个方程决定 PA = L PB = L + V $ t 1 PC = L + V $ t 2 把式 ( 3) 代入 ( 4) 得出计算方程 sin B2 sin Bcos ( A- A 2 ) + cos B 2 cos BL + $t 1 @ V = 0 R sin B1 sin Bcos ( A- A 1 ) + cos B 1 cos Bcos L cos R = 0 sin B3 sin Bcos ( A- A 3 ) + cos B 3 cos BL + $t 2 @ V = 0 R 上述方程为三元非线性方程的超越方程组, 使 cos 用解析法很难求解。如果需要声发射系统实时地计 算出声源位置, 就要选择合适的数值解法。非线性 方程组的数值解法很多, 牛顿迭代法有较快的收敛 速度和很好的稳定性。其基本原理是 x k+ 1 = x k - F c( x k ) - 1 F( x k ) 式中 x
( 4)
( 5)
) ) ) 第 k + 1 次迭代的结果矩阵 x ) ) ) 第 k 次迭代结果的矩阵
声发射源的定位方法
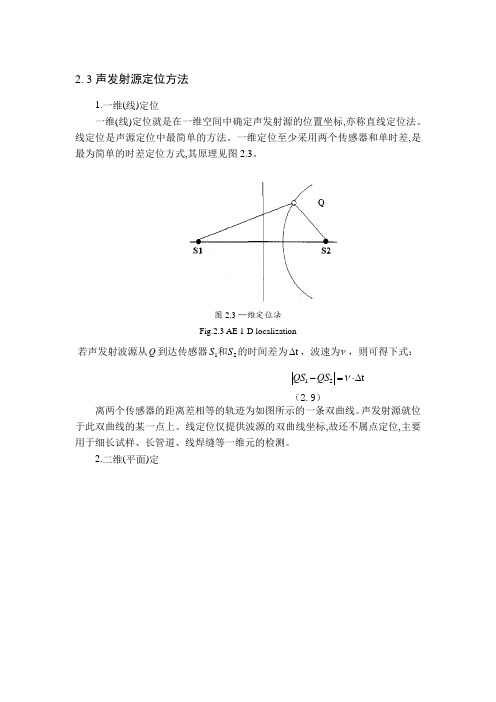
2. 3声发射源定位方法1.一维(线)定位一维(线)定位就是在一维空间中确定声发射源的位置坐标,亦称直线定位法。
线定位是声源定位中最简单的方法。
一维定位至少采用两个传感器和单时差,是最为简单的时差定位方式,其原理见图2.3。
图2.3 —维定位法Fig.2.3 AE 1-D localization 若声发射波源从Q 到达传感器21S S 和的时间差为t ∆,波速为ν,则可得下式: t 21∆⋅=-νQS QS(2.9)离两个传感器的距离差相等的轨迹为如图所示的一条双曲线。
声发射源就位于此双曲线的某一点上。
线定位仅提供波源的双曲线坐标,故还不属点定位,主要用于细长试样、长管道、线焊缝等一维元的检测。
2.二维(平面)定图2.4 二维(平面)定位法Fig.2.4 AE 2-D localization二维定位至少需要三个传感器和两组时差,但为得到单一解一般需要四个传感器三组时差。
传感器阵列可任意选择,但为运算简便,常釆用简单阵列形式,如三角形、方形、菱形等。
近年来,任意三角形阵列及连续多阵列方式也得到应用。
就原理而言,波源的位置均为两组或三组双曲线的交点所确定。
由四个传感器构成的菱形阵列平面定位原理见图2.4。
若由传感器31S S 和间的时差X t ∆所得双曲线为1,由传感器42S S 和间的时Y t ∆所得双曲线为2,波源Q 离传感器31S S 和,42S S 和的距离分别为Y X L L 和,波速为ν,两组传感器间距分别为a 和b ,那么,波源就位于两条双曲线的交点()Y X Q ,上,其坐标可由下面方程求出: ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛122b 2122a 22222222222Y Y X X L X L Y L Y L X (2.10)平面定位除了上述菱形定位方式外,常见的还有三角形定位、四边形定位、传感器任意布局定位等。
全相位与Geiger算法的岩石声发射源定位方法

全相位与Geiger算法的岩石声发射源定位方法黄晓红;孙国庆;张凯月【摘要】Geiger定位算法在岩石定位分析中得到广泛应用,但是对初始值要求非常严格,若初始值选择不当,则很难进入收敛范围。
为了提高定位精度,减少迭代次数,针对这些问题,提出全相位与Geiger算法的岩石声发射源定位方法。
首先进行花岗岩(50 mm×100 mm×50 mm)断铅实验,接着充分利用全相位FFT 相位不变性的优势分析断铅信号,通过相位差法求出时延同时反演声发射源求出Geiger迭代初始值,最后综合最小二乘法与Geiger算法,迭代求出最优解。
实验仿真结果显示此算法的平均误差相比美国PCI-2型声发射仪器定位结果降低了约5 mm,有效解决了Geiger初始值选取的问题,能够迅速进入收敛范围,提高了收敛速度和定位精度。
%Geiger localization algorithm is widely used in the analysis of rock localization,however,it is very strict on the initial value,if the initial value is not properly selected,it is difficult to enter the convergence range. In order to improve the positioning precision and reduce the number of iterations,rock acoustic emission source localization method based on all phase and Geiger algorithm is put forward. First of all,the experiment was carried out on the granite(50 mm×100 mm×50 mm). Secondly,making full use of the advantage of apfft phase invariance to analyse the lead signal,and the delay time is obtained by the phase difference method,at the same time,the initial value of the Geiger iteration is obtained by the inversion of the acoustic emission source. In the end,combining least square method and Geiger algorithm to obtain optimum solution. Experimental simulation results are shown:Comparingthe positioning results of the United States PCI-2 type acoustic emission instrument,the average error decreased by about 5 mm. This method can effectively solve the problem of selecting the initial value of Geiger,so that it can quickly enter the convergence range,improving the convergence speed and positioning accuracy.【期刊名称】《传感技术学报》【年(卷),期】2016(029)011【总页数】6页(P1705-1710)【关键词】信号分析;声发射源定位;全相位相位差;Geiger;最小二乘法【作者】黄晓红;孙国庆;张凯月【作者单位】华北理工大学信息工程学院,河北唐山063009;华北理工大学电气工程学院,河北唐山063009;华北理工大学信息工程学院,河北唐山063009【正文语种】中文【中图分类】TU45在一般情况下,由于受力或其它作用下,材料产生瞬间弹性波的现象被称为声发射AE(Acoustic Emission)。
声发射系统操作指南-罐底定位

开机检测
1、把USB加密狗插在声发射主机上,点击图标AEwin for SAMOS,软件打开过程会
自动扫描24个通道。
2、先不要连接电缆及探头,建立一副“撞击vs通道”图,把门槛设置为35db,并开
始采集,此时系统应该采集不到任何信号;把门槛降到20db,所有选择的通道应该都会有信号
软件设置
1、硬件设置
2、定位设置
一号探头布置在正北方向,所有探头按顺时针排列。
3、定位设置
(1)定位图
(2)各个通道幅值随时间的散点图
(3)撞击随时间的累积图
(4)波形图
测试步骤
1、正确连接探头、长电缆、短电缆,并保证它们一一对应。
2、观察所有探头背景噪音。
3、用橡皮锤或木锤敲击每个探头附近,因锤击信号很大,所有探头应该都能达到满幅值
99db。
4、把门槛调至80db,在每个探头附近断三次铅,通过行列表,记录每个探头的断铅响应
以及计算它们的平均值。
5、把门槛降至35-40db,开始采集并保存数据。
一般数据记录时间为两小时,若信号量非
常少,可相应缩短检测时间为1.5小时;若信号量非常大,可适当延长检测时间为2.5-3小时。
6、停止采集,并把声发射系统的数据保存到笔记本电脑中。
(由于连接步骤的第4部,笔
记本电脑的某个磁盘是声发射系统的自盘,所以数据可以直接拷贝)
7、关机,右键点击声发射主机的任务栏选择“任务管理器”,选择关机。
声发射线性定位实验
突发型声发射信号线性定位实验目的:1、了解声发射信号处理的过程。
2、了解声发射线性定位的原理。
3、学会做声发射定位实验和数据分析。
实验工具:1、两通道及以上声发射采集系统一套。
2、声发射线性定位软件包。
3、材质均匀的不锈钢板/条一块。
4、标定铅笔一套。
实验内容:以标定铅笔芯折断为信号源,在钢板上做定位实验,分析取得的数据,并对定位精度进行分析。
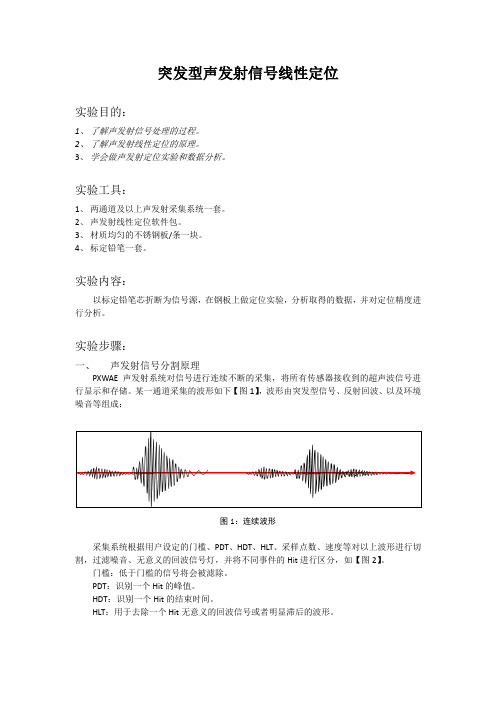
实验步骤:一、声发射信号分割原理PXWAE声发射系统对信号进行连续不断的采集,将所有传感器接收到的超声波信号进行显示和存储。
某一通道采集的波形如下【图1】,波形由突发型信号、反射回波、以及环境噪音等组成:图1:连续波形采集系统根据用户设定的门槛、PDT、HDT、HLT、采样点数、速度等对以上波形进行切割,过滤噪音、无意义的回波信号灯,并将不同事件的Hit进行区分,如【图2】。
门槛:低于门槛的信号将会被滤除。
PDT:识别一个Hit的峰值。
HDT:识别一个Hit的结束时间。
HLT:用于去除一个Hit无意义的回波信号或者明显滞后的波形。
图2:分割成Hit根据门槛确认每个Hit的到达时间,同一个事件的Hit在不同通道的到达时间T1、T2作为参数,进行线性定位的运算。
图3:不同通道收到的同一Hit二、声发射线性定位的原理声发射线性定位的实验图如下。
传感器1、传感器2和断铅点在同一直线上,在传感器1和传感器2之间的某处产生断铅信号。
图4:线性定位假设在星号处断铅,信号沿着材料分别向左右传播,到达1、2号传感器的时间差等于距离差除以波形传播速度的值(式1)。
T1-T2=(D1-D2)/V (式1)由于我们事先知道传感器1和传感器2的位置,可得(式2)。
D1+D2=D (式2)由公式1和公式2可以计算出(式3)。
D1=((T1-T2)*V+D)/2 (式3)根据传感器1的位置和D1即可以确定信号源的点。
三、系统硬件布置将声发射系统传感器、放大器、采集器、电脑主机等按照【图5】进行连接,保证系统可以正常运行。
线性定位、平面定位和三维定位的操作步骤

3、定时参数设置
PDT的正确设置将确保正确鉴别信号峰值的上升时间 及峰值幅度的检测。HDT 的正确设置将确保结构中的一个 AE 信号反映到系统中的是一个且仅为一个hit。HLT 的正确 设置将避免同一个信号北采集多次。对于各种材料,以上 三个参数的推荐值如下: 单位:微秒 复合材料 金属小试件 高衰减金属构件 低衰减金属构件 水
3、定时参数设置
PDT的正确设置将确保正确鉴别信号峰值的上升时间 及峰值幅度的检测。HDT 的正确设置将确保结构中的一个 AE 信号反映到系统中的是一个且仅为一个hit。HLT 的正确 设置将避免同一个信号北采集多次。对于各种材料,以上 三个参数的推荐值如下: 单位:微秒 复合材料 金属小试件 高衰减金属构件 低衰减金属构件 水
(5)事件定义值:此项选择为两传感器的间距。 (6)事件闭锁值:此项选择为事件定义值的 1.5--2倍即可。 (7)过定义值:此项选择为事件定义值的 1/10即可。 (8)定时策略、撞击/事件最小&最大值、最 大反复这三个选项根据定位类型选择默认值 即可。
6、定位显示
通用页设置完毕后,点击该页面下方的 定位显示,则会弹出如下对话框。
涂抹适量的耦合剂
2、AE通道设置
(1)打开AEwin软件后,在“文件”下拉菜单中新建一个项 目文件,将该项目文件存在某个位置。选择采集设置菜单 中的硬件设置或按F2,通道设置对话框则会弹出,如下图 所示。
(1)首先选择实验过程中所选用的通道,只需 勾选通道前的选择框即可; (2)门槛类型选择固定门槛,浮动门槛多用于 背景噪音复杂的环境中,门槛值一般选择为 35db-45db; (3)内部增益不用选择,前放增益的选择必须 与前置放大器一致,否则会出错,一般选择 40db。若探头是前置一体化的,则只能选择 40db。 (4)模拟滤波器主要是根据传感器来定的,以 下是常用传感器的推荐值:R3a或R6a(20100khz),R15a(100-400khz),Nano 30 (100-400khz)
基于神经网络算法的复合材料板声发射源定位
经网络方法定位在中国的研究还 比较少 ,本文使用一 种相对 成熟的神经 网络算法一一 误差反 向传播算法
5 0
导 弹 与 航 天 运 载 技 术
( c r p g t n B )来 实现 复合材 料板 上 的声发 Ba kP o a ai , P o
1 神经 网络 原理 定位 的相 关理 论 . 2
作 为神 经 网络训 练 的训练 函 数 。隐 函数个 数 的选取 经 过 多次 尝试 后采 用 1 ,选取 方法见 文献 [】 0 8。
1 试验设 计 . 3
试验 所用 的碳 纤维编 织板 为 4 0mi ×2 0mm, 4 l 4 l 在上 面 画出一个 3 0mm×10mm 的区域 ,将 4个传 5 6
拥有很多其他无损检测手段所不具备的优点,如实 时
动 态检 测 性 、被 动检 测 性等 。理 论上 来 讲 ,复 合材 料
在 加载 中 出现 的声 发射 信 号可 以包含 关 于 复合 材料 损
拟合各 向波速 的工作 ,在形状复杂的试件表面难 以实 施 ; 并且 在应 力 波传 播 路径 更加 复 杂 的情况 ( 如含 多
值、振铃计数等; )算法的实现和计算坐标与实际坐 d 标 的对 比 。
1 传 感器 的选择 . 1 声 发射信 号 的频 率范 围涵 盖 次声 频 、声频 直 到超
声频 ,从几 个赫 兹 到几 兆赫 兹 。通常 声发 射试 验 所采 用 的断铅 信号 的频率 主要 集 中在 1 MHz范 围以 内。
Ab t a t e e b r - a q a d r i i g f n to s a p i d t o a e t ea o s i mi so o r e o o o i l t , n s r c :L v n e g M r u r t a n n c i n wa p le o l c t h c u tc e s i n s u c n c mp st p a e i t u e wh c e a rv n i fwa e wa h s n a h n u e t r Afe r i i g t e p sto ft e AE s u c s we lma p d t ih t r i i g tme o v s c o e st e i p tv c o  ̄ trta n n , h o i n o o r e i l h i h pe o t e a rv n i f e c e s r h riig t me o a h s n o .Be i e ,a m o e p e ie wa n a t i i g t e a rv n i ,wh c a e e sl p l d t s d s r r c s y i t n n h r i i g t a me ih c n b a i a pi o y e e g n e i g i ic s e e e i se d o ec n e to a y o r s i g fx dt r s o d wh c y r s t n s me d v a i n o n i e rn , sd s u s d h r n t a f h o v n i n l t wa fc o sn e e h l , i h ma e ul i o e i t f i h o
声发射源的定位方法
2. 3声发射源定位方法1.一维(线)定位一维(线)定位就是在一维空间中确定声发射源的位置坐标,亦称直线定位法。
线定位是声源定位中最简单的方法。
一维定位至少采用两个传感器和单时差,是最为简单的时差定位方式,其原理见图2.3。
图2.3 —维定位法Fig.2.3 AE 1-D localization 若声发射波源从Q 到达传感器21S S 和的时间差为t ∆,波速为ν,则可得下式: t 21∆⋅=-νQS QS(2.9)离两个传感器的距离差相等的轨迹为如图所示的一条双曲线。
声发射源就位于此双曲线的某一点上。
线定位仅提供波源的双曲线坐标,故还不属点定位,主要用于细长试样、长管道、线焊缝等一维元的检测。
2.二维(平面)定图2.4 二维(平面)定位法Fig.2.4 AE 2-D localization二维定位至少需要三个传感器和两组时差,但为得到单一解一般需要四个传感器三组时差。
传感器阵列可任意选择,但为运算简便,常釆用简单阵列形式,如三角形、方形、菱形等。
近年来,任意三角形阵列及连续多阵列方式也得到应用。
就原理而言,波源的位置均为两组或三组双曲线的交点所确定。
由四个传感器构成的菱形阵列平面定位原理见图2.4。
若由传感器31S S 和间的时差X t ∆所得双曲线为1,由传感器42S S 和间的时Y t ∆所得双曲线为2,波源Q 离传感器31S S 和,42S S 和的距离分别为Y X L L 和,波速为ν,两组传感器间距分别为a 和b ,那么,波源就位于两条双曲线的交点()Y X Q ,上,其坐标可由下面方程求出: ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛122b 2122a 22222222222Y Y X X L X L Y L Y L X (2.10)平面定位除了上述菱形定位方式外,常见的还有三角形定位、四边形定位、传感器任意布局定位等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
声发射源的定位方法
1.声源叠加法:
声源叠加法利用多个声源同时发出声音,在接收端通过分析各个声源
的声音特征来确定声源的位置。
这种方法适用于声源分布均匀、声音特征
能够区分的情况。
对于每一个声源,可以通过测量声音的到达时间和幅度
来确定其与接收端的距离。
2.时差测量法:
时差测量法利用声音在传播过程中的传播速度来测量声源与接收端的
距离。
当声音从声源发出后,经过一段时间才能到达接收端,通过测量声
音的传播时间差就可以确定声源的位置。
常用的时差测量方法包括互相关法、波束形成法等。
-互相关法:将接收到的声音信号与参考信号做互相关运算,根据互
相关函数的峰值位置和幅度来确定声源的位置。
-波束形成法:利用具有多个接收单元的阵列或麦克风进行声音接收,并根据接收到的信号进行波束形成,通过测量到达时间差来确定声源的位置。
3.幅度比测量法:
幅度比测量法利用声音在传播过程中的能量损失来测量声源与接收端
的距离。
声音在传播过程中会受到空气衰减、散射等因素的影响,幅度会
随距离的增加而减小。
通过测量接收到的声音幅度比来确定声源的位置。
-三点法:利用三个接收器测量到的声音幅度比来确定声源的位置。
通过测量三个接收器之间的幅度比,可以求解出声源的位置。
4.高斯法:
高斯法采用统计学方法,通过分析接收到的声音信号的统计特性来确定声源的位置。
该方法需要进行大量的声音信号采集和处理,通过建立声音信号的统计模型来推测声源的位置。
综上所述,声发射源的定位方法包括声源叠加法、时差测量法、幅度比测量法和高斯法等。
这些方法可以单独或者结合使用,根据实际应用场景和传感器条件的不同,选择合适的定位方法来实现声发射源的定位。