力法典型方程
力法典型方程柔度系数
力法典型方程柔度系数力法典型方程是材料力学研究中常用的一种表示方法,它能够描述材料受力时的本质特征。
在力法典型方程中,柔度系数是一个重要的物理量,用于表示材料在受力时的弹性特性。
什么是柔度系数?柔度系数是材料力学中一个很重要的物理量,这个物理量可以用于描述物体在受力时的弹性特性。
简单来说,所谓柔度系数就是物体受外力作用下形变产生的应力与应变的比值。
柔度系数通常以弹性模量为基础,而它的倒数就是物体的刚度系数。
在实际应用中,弹性模量是一种非常重要的材料力学参数,用于描述弹性材料在受力时的本质特征,而柔度系数正是弹性模量的倒数。
因此,柔度系数可以用于描述材料某种特定的力学行为,包括弹性变形的程度、刚度等等。
比如,弹簧就是一种典型的弹性材料,它的涵盖了所有的形变应力和变形的比值,意味着弹簧受到的力越大,形变就越大。
因此,柔度系数可以用来衡量弹簧的弹性能力。
柔度系数在力法典型方程中的应用力法典型方程是材料力学研究中常用的一种表示方法,用于描述材料在受力时的本质特征。
在力法典型方程中,柔度系数是一个很重要的物理量,用于描述材料在受力时的弹性特性。
力法典型方程通常表示为f(x) = kx,其中x是材料的位移,k是柔度系数。
当物体受力时,它会发生形变,并且会产生反作用力来抵消外力。
而柔度系数就是描述物体在受力时的弹性特性的一个重要参数。
比如,当有一个物体受到一个力F作用时,它发生的形变量可以用弹性模量E来表示,而它的弹性形变量可以用材料的柔度系数k来表示。
柔度系数的大小通常与材料质地和处理过程有着密切的关系。
对于弹性材料来说,柔度系数越大,材料的弹性变形量就越大,材料受到的应力也越小。
因此,柔度系数越大的材料,越容易发生弹性变形。
结论柔度系数是材料力学研究中的一个重要物理量,它用于描述材料在受力时的弹性特性。
在力学研究中,柔度系数通常与弹性模量密切相关,它可以用来衡量物体受到外力时的形变程度和弹性能力。
在力法典型方程中,柔度系数被用来描述物体在受力时的弹性特性,它是该方程模型的一个关键参数。
6.4 力法的典型方程
M 2图
6.4 力法的典型方程
按叠加公式 M =`M1 X1 +`M2 X2 +MP 作弯矩图。
计算控制截面弯矩:
MCB
1 14
ql2(上拉)
M AC
1 28
ql2(右拉)
1 ql 2 14
q
B
C
5 ql 2 56 A 1 ql 2 28
M图 ( kN m )
第六章 用力法计算超静定结构
6.4 力法的典型方程
建筑工程系
6.4 力法的典型方程
一、2次超静定结构的计算:
C
用力法计算图(a)结构并作M图: 多余约束处的位移条件:
1 0
A
(1)
2 0
Δ1 是基本体系在X1作用点(B点)沿X1方 C 向的位移,即B点的竖向位移;
Δ2 是基本体系在X2作用点(B点)沿X2方
向的位移,即B点的水平位移。
A
q
B
l
l
(a)
q
B X2
X1
(b)
6.4 力法的典型方程
一、2次超静定结构的计算:
分别计算基本结构在每种力单独作用下的位移:
(一)荷载单独作用时,基本结构
C
q
B
的相应位移为:Δ1P、Δ2P。
1P
A
(c) 2P
(二)单位力`X1=1单独作用时,基 本结构的相应位移为:d11、d21。
δn1X1δn2X2 δnnXnnP 0
这就是n次超静定结构在荷载作用下力法方程的一般 形式,常称为典型方程。
6.4 力法的典型方程
δ11X1δ12X2 δ1nXn1P 0 δ21X1δ22X2 δ2nXn2P 0
力法—力法典型方程(建筑力学)

第四节 力法典型方程
用力法计算超静定结构的关键在于根据位移条件建立力 法方程,以求解多余未知力。
图a所示三次超静定刚架为,现去掉支座B的三个多余约 束,并以相应的多余未知力X、X和X3代替,则基本体系如 图b所示。
力法
由于原结构在固定支座B处不可能有任何位移,因此,在 承受原荷载和全部多余未知力的基本体系上,也必须保证这 样的位移条件,即在点B沿X1、X2和X3方向上的相应位移Δ1、 Δ2和Δ3都应为零。
图c、d、e、f为各单位力和荷载FP分别作用于基本结构上 时,点B沿各多余未知力方向上的位移。
力法
根据叠加原理,可将基本体系应满足的位移条件表示为
1 11X1 12 X 2 13 X 3 1 0 2 21X1 22 X 2 23 X 3 2 0
3ቤተ መጻሕፍቲ ባይዱ
31X1
32 X 2
33 X 3
3
0
这就是求解多余未知力X1、X2和X3所要建立的力法基本 方程。其物理意义是基本结构在全部多余未知力和已知荷 载共同作用下,在去掉多余约束处的位移应与原结构中相 应的位移相等。
力法
对于n次超静定结构,力法的基本方程为
位于从左上方至右下方的一条对角线上的系数δii(i=1、 2、…n) 称为主系数,其他的系数δij(i、j=1、2、…n) 称为副系数,最后一项∆nP称为自由项。
力法方程中的系数和自由项都可按第十六章所述求位移 的方法求得。
力法
解力法方程得到多余未知力后,超静定结构的弯矩可根据 平衡条件求出,或按下述叠加原理求出弯矩
M M1X1 M 2X2 M nXn M
求出弯矩后,也可以直接应用平衡条件求其剪力和轴力
所有的系数和自由项都是基本结构在去掉多余约束处沿 某一多余未知力方向上的位移。
【毕业论文】力法的基本原理
1第六章力法2一. 力法的基本未知量和基本体系力法计算的基本思路:把超静定结构的计算问题转化为静定结构的计算问题,即利用已经熟悉的静定结构的计算方法来达到计算超静定结构的目的。
6-1 力法的基本原理3力法思路基本结构待解的未知问题qEI EIqEIX 1基本体系基本未知量01=Δ基本方程41111=+=P ΔΔΔ11111X Δδ=01111=+⋅P ΔX δ力法方程力法方程P 1Δ其中δ11和Δ1P可图乘法获得;由此确定约束力X 1,通过叠加求内力;超静定问题变成静定问题。
q1X Δ11=X 11δqEIqEIX 11=Δ5)力法是将多余未知力作为基本未知量的分析方法。
)将全部多余约束去掉得到的静定结构称力法的基本结构。
)根据原结构的变形条件而建立的位移方程称力法基本方程。
在变形条件成立条件下,基本体系的内力和位移与原结构相同。
1111=+⋅P ΔX δ6基本结构X 1例:基本体系PV ΔB 1==原结构已知的X 1方向的位移原结构70V ΔB 1==基本结构在X 1和外荷载P 分别作用下的变形:X 111ΔPP1Δ原结构已知的X 1方向的位移基本结构在X 1方向的位移1P 11Δ+Δ1P 11Δ+Δ0=11111X Δδ=11=X 11δ01111=Δ+P X δ力法基本方程的物理意义:基本结构在X 1和外荷载P 共同作用下,在B 点的竖向位移之和=原结构已知的在B 点的竖向位移(等于零)。
8一个超静定结构可选的力法基本结构往往不只一种。
X 1表示原结构支座B 截面的弯矩。
基本体系二基本体系二选取:原结构PPX 1基本结构Δ1=原结构在B 点左右两截面的相对转角等于零9基本结构:PX 11PΔ11ΔB11111X δ=Δ0ΔX δ=+1P 111基本体系在X 1 和外荷载P 共同作用下,在B 点左右两截面的相对转角之和=原结构已知的在B 点左右两截面的相对转角(等于零)1P11Δ+Δ0=10(1)(2)(1)基本结构的图和图好绘。
力法

所以:力法典型方程的实质是位移协调方程!
由典型方程解得X1
、X2后,利用叠加原理,有
M M 1 X1 M 2 X 2 M P
n次超静定结构的力法方程
11 X 1 12 X 2 1n X n 1 P 0 21 X 1 22 X 2 2 n X n 2 P 0
1 1 2 1 1 2 6 6 6 6 6 6 EI1 2 3 EI 2 2 3
3) 求自由项和系数
4) 代入典型方程求解
X 1 1.927kN , X 2 6.746kN
504 EI 2
22
1 1 2 l3 11 ll l EI 2 3 3 EI
代入力法典型方程
3 X 1 ql 8
ql 2 8
q A
5 ql 8
结构任一截面的弯矩M可表示为
B
3 ql 8
M M 1 X1 M P
以截面A为例:
3ql ql 2 MA l 2 8
解:1) 确定超静定次数,选 取基本体系
2) 根据原结构已知变形条件 建立力法典型方程
3) 求自由项和系数
1 1 2 2l 11 l 1 1 2 EI 2 3 3 EI 1 1 1 l 12 21 l 1 1 EI 2 3 6 EI
11 X 1 12 X 2 1 P 0 21 X 1 22 X 2 2 P 0
4) 代入典型方程求解
ql 2 ql 2 X1 , X2 15 60
22
2l 11 3 EI
1 2 ql 1 ql l 1 EI 3 8 2 24EI
05-讲义:7.2 力法的基本原理及典型方程
第二节 力法的基本原理及典型方程力法是计算超静定结构的最基本方法。
采用力法求解超静定结构问题时,不能孤立地研究超静定问题,而是应该把超静定问题与静定问题联系起来,即利用已经熟悉的静定结构计算方法来达到计算超静定结构的目的。
一、力法的基本原理这里先用一个简单的一次超静定结构为例来说明力法的基本概念,即讨论如何在静定结构的基础上,进一步寻求计算超静定结构的方法。
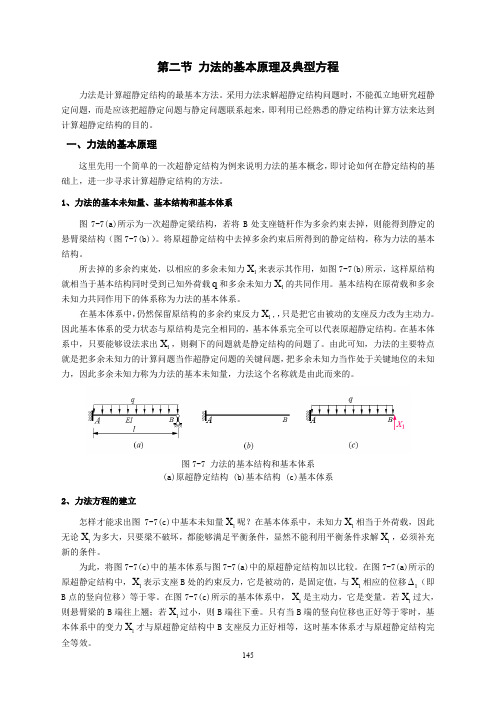
1、力法的基本未知量、基本结构和基本体系图7-7(a)所示为一次超静定梁结构,若将B 处支座链杆作为多余约束去掉,则能得到静定的悬臂梁结构(图7-7(b))。
将原超静定结构中去掉多余约束后所得到的静定结构,称为力法的基本结构。
所去掉的多余约束处,以相应的多余未知力1X 来表示其作用,如图7-7(b)所示,这样原结构就相当于基本结构同时受到已知外荷载q 和多余未知力1X 的共同作用。
基本结构在原荷载和多余未知力共同作用下的体系称为力法的基本体系。
在基本体系中,仍然保留原结构的多余约束反力1X ,,只是把它由被动的支座反力改为主动力。
因此基本体系的受力状态与原结构是完全相同的,基本体系完全可以代表原超静定结构。
在基本体系中,只要能够设法求出1X ,则剩下的问题就是静定结构的问题了。
由此可知,力法的主要特点就是把多余未知力的计算问题当作超静定问题的关键问题,把多余未知力当作处于关键地位的未知力,因此多余未知力称为力法的基本未知量,力法这个名称就是由此而来的。
图7-7 力法的基本结构和基本体系(a)原超静定结构 (b)基本结构 (c)基本体系2、力法方程的建立怎样才能求出图7-7(c)中基本未知量1X 呢?在基本体系中,未知力1X 相当于外荷载,因此无论1X 为多大,只要梁不破坏,都能够满足平衡条件,显然不能利用平衡条件求解1X ,必须补充新的条件。
为此,将图7-7(c)中的基本体系与图7-7(a)中的原超静定结构加以比较。
在图7-7(a)所示的原超静定结构中,1X 表示支座B 处的约束反力,它是被动的,是固定值,与1X 相应的位移1 (即B 点的竖向位移)等于零。
力法典型方程

力法典型方程力法典型方程是物理学中经常用到的方程,它描述了物体受力和相应运动的关系,是力学基本原理的具体应用。
下面介绍几个力法典型方程的例子:1. 牛顿第二定律:F = ma这是力学中最基本的方程之一。
它表明,物体的加速度与物体所受的合外力成正比,质量越大,加速度越小;质量越小,加速度越大。
这个方程揭示了物体运动的原因是受到力的作用。
2. 万有引力定律:F = G * (m?m?) / r2这是描述物体间引力作用的方程,其中F表示物体之间的引力,m?和m?分别是两个物体的质量,r是它们之间的距离,G是一个常数,称为万有引力常数。
这个方程告诉我们,两个物体之间的引力与它们的质量成正比,与它们之间的距离的平方成反比。
3. 功率方程:P = F * v这个方程描述了力的功率和物体的速度之间的关系。
功率表示单位时间内所做的功,F是作用在物体上的力,v是物体的速度。
这个方程告诉我们,功率与力和速度成正比,当力和速度增大时,功率也相应增大。
4. 胡克定律:F = k * x这个方程用于描述弹簧的伸缩过程中的力和位移之间的关系。
其中F 表示弹簧受到的恢复力,k是弹簧的弹性系数,x是弹簧的位移。
这个方程告诉我们,弹簧的恢复力与它的位移成正比。
5. 速度-时间关系方程:v = u + at这个方程描述了物体的速度和时间之间的关系,其中v是物体的最终速度,u是初始速度,a是物体的加速度,t是经过的时间。
这个方程告诉我们,物体的速度随时间的增加而改变,其改变率与加速度成正比。
这些力法典型方程是物理学中最常用的方程之一,它们可以帮助我们理解物体受力和相应运动的规律。
通过应用这些方程,我们可以计算物体的加速度、速度、力、功率等物理量,并预测物体的运动轨迹和相互作用。
在实际问题中,我们可以根据具体情况选用适当的力法典型方程来求解。
通过运用这些方程,我们能够更好地理解和解释物体的运动规律,为科学研究和工程实践提供重要的理论基础。
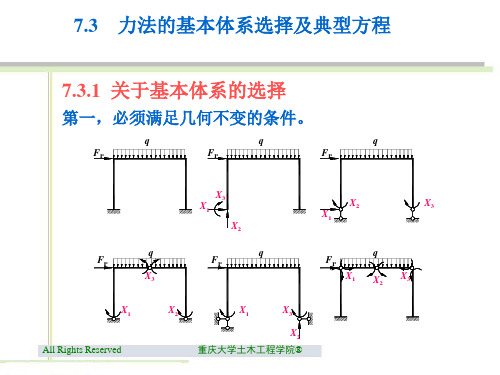
7.3 力法的基本体系选择及典型方程
(a)
7.3.2 关于基本方程的建立
∆1 = ∆11 + ∆12 + ∆1P = 0 ∆2 = ∆21 + ∆22 + ∆2 P = 0
因为 (a)
∆11=δ11X1、∆21=δ21X1 ∆12=δ12X2、∆22=δ22X2
代入式(a),得 代入式 得
∆1 = δ 11 X 1 + δ 12 X 2 + ∆1P = 0 ∆2 = δ 21 X 1 + δ 22 X 2 + ∆2 P = 0
3)各式中最后一项∆iP称为自由项,它是荷载单独作用 ) 称为自由项, 时所引起的沿X 方向的位移,其值可能为正、负或零。 时所引起的沿 i方向的位移,其值可能为正、负或零。 4)根据位移互等定理可知,在主斜线两边处于对称位置 )根据位移互等定理可知, 是相等的, 的两个副系数δij与δji是相等的,即
1)主斜线(自左上方的δ11至右下方的δnn)上的系数δii称为主系数 )主斜线( 或主位移,它是单位多余未知力X 单独作用时所引起的沿其本身 或主位移,它是单位多余未知力 i=1单独作用时所引起的沿其本身 方向上的位移,其值恒为正,且不会等于零。 方向上的位移,其值恒为正,且不会等于零。 2)其它的系数δij(i≠j)称为副系数或副位移,它是单位多余未知力 ) 副系数或副位移, )称为副系数或副位移 Xj=1单独作用时所引起的沿 i方向的位移,其值可能为正、负或零。 单独作用时所引起的沿X 单独作用时所引起的沿 方向的位移,其值可能为正、负或零。
∆22
q C FP A B
∆1P ∆2P
q C X1 B X2
FP
C A
B X2
FP A
基本体系之二
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力法典型方程
2006年11月30日星期四02:41 P.M.
1、力法典型方程:力法典型方程是根据原结构的位移条件建立起来的。
典型方程的数目等于结构的超静定次数。
n次超静定结构的基本体系有n个多余未知力,相应的有n个位移协调条件。
利用叠加原理将这些位移条件表述成如下的力法典型方程:
典型方程讲解返回顶部
2、几点注意:
①力法方程的物理含义是:基本体系在外部因素和多余未知力共同作用下产生的多余未知力方向上的位移,应等于原结构相应的位移。
实质上是位移协调条件。
②主系数δii表示基本体系仅由X i=1作用所产生的Xi方向的位移。
;
付系数δij表示基本体系仅由X j=1作用所产生的X i方向的位移。
主
系数恒大于零,负系数可为正、负或零。
力法方程的系数只与结构本身和基本未知力的选择有关,是基本体系的固有特性,与结构上的外因无关。
③自由项,分别表
示基本体系仅由荷载作用,支座移动,温度变化所产生的X i方向的位移,可为正、负或零。
④对于具有弹性支承和内部弹性约束的超静定结构,若取弹性约束力作为基本未
知力X
,右端项为,若选取的基本体系中保留弹性约束,在的计算公式中
应增加一项弹性力的虚功项:两种情况下的反力同向,乘积为正。
返回顶部
3、计算步骤
由上述,力法计算步骤可归纳如下:
1)确定超静定次数,选取力法基本体系;
2)按照位移条件,列出力法典型方程;
3)画单位弯矩图、荷载弯矩图,求系数和自由项;
4)解方程,求多余未知力;
5)按 M=∑M i〃X i+M P叠加最后弯矩图。