微型计算机控制技术于海生60页PPT
《微型计算机控制技术》于海生第5章PPT课件

人们对于S平面中的极点分布与系统性能的关系比 较熟悉,首先根据相应连续系统性能指标的要求 来 给定S 平面中的极点,然后再根据 zi = e SiT (i=1,2,…,n) 的关系求得Z 平面中的极点分布,T 为 采样周期。
[例5.2]被控对象的传递函数 G(s) =1/s2,采样周期 T=0.1s,采用零阶保持器。现要求闭环系统的动态 响应相当于阻尼系数为ξ=0.5,无阻尼自然振荡频率 ωn=3.6 的二阶连续系统,用极点配置方法设计状 态反馈控制规律L,并求u(k)。
连续系统的状态方程通常用一阶微分方程组表示
•
x(t)f[x(t)u ,(t)t,]x ;(t0)
输出方程的一般形式为
y(t)g[x(t)u ,(t)t],
离散系统的状态方程通常用一阶差分方程组表示
x(k 1) f [x(k), u(k), k]; x(0)
输出方程的一般形式为
y(k) g[x(k), u(k), k]
x (t) A x(t) B u(t); x(t0 ) y(t) C x(t)
离散化为 其中ቤተ መጻሕፍቲ ባይዱ
x(k 1) Fx(k) Gu(k)
y(k
)
Cx(k
)
F e AT ,G T e A dB 0
设计出反馈控制规律L,以使闭环系统
具有所需要的极点配置。
反馈控制规律L u(k) Lx(k)
闭环系统状态方 x(k1)Fx(k)Gu(k)
程
FGL可理解为引入状态反馈
Fx(k)GLx(k)
情况下的新的状态转移矩阵 (FGL)x(k)
x(k 1) (F GL)x(k)
闭环系统特征方程 zIFGL0
设给定所需要的闭环系统的极点为zi(i=1,2,…,n),则 闭环系统特征方程为
微型计算机控制技术(于海生版)课后答案 ppt课件

曲线 。
ppt课件
26
解:首先求取广义对象的脉冲传递函数
1 es G(s) H (s)Gc (s) s3
滞后一个周期
G(z) Z[G(s)]
单位圆上零点
0.5z1(1 z1 ) (1 z1 )2
单位圆上极点
ppt课件
27
单位速度输入信号,设计最少拍无纹波控制器
e (z) (1 z1 )2 1 a0z1
ppt课件
24
Y (z) (z)R(z) z1 z2 z3 z4 L
E(z) e (z)R(z) 1 U(z) D(z)E(z) 0.111z1 0.01233z2 0.001368z3 L
求输出响应y(k)、控制信号u(k)、误差序列e(k) y(0) 0, y(1) y(2) L 1 u(0) 0.111, u(1) 0.01233, u(3) 0.002368, u(4) L e(0) 1,e(1) e(2) e(3) L 0
按极点配置方法设计状态反馈控制规律l使闭环系统的极点配置在z平面1208025101010102可控性分析1208025000368006320003680007670063200233fgrankw且f非奇异状态完全可控因此可任意配置闭环极点3极点配置比较系数可得080251607025006320003681368036800026400632162462162462162462在第2题中进行全状态直接反馈但只有测到一个状态变量现设计一个状态观测器预报观测器极点配置在试求观测器的增益矩阵
位置型
uk 1.3ek 0.6ek 1 0.3uk 1
ppt课件
课程《微型计算机控制技术》电子教案课件(全)

精品课程《微型计算机控制技术》电子教案PPT课件(全)第一章:微型计算机控制技术概述1.1 课程介绍了解《微型计算机控制技术》的课程目标和意义。
掌握课程的主要内容和教学方法。
1.2 微型计算机控制技术基本概念解释微型计算机控制技术的定义。
探讨微型计算机控制技术的发展历程和应用领域。
1.3 微型计算机控制系统组成分析微型计算机控制系统的硬件和软件组成。
了解输入/输出设备、控制器、执行器等主要组成部分的功能。
1.4 微型计算机控制技术的关键技术探讨微型计算机控制技术中的关键技术和算法。
了解数字信号处理、模拟/数字转换、PID控制等核心技术。
第二章:微型计算机控制系统的硬件设计2.1 控制器硬件设计基础分析控制器硬件设计的基本要求和原则。
掌握控制器硬件设计的步骤和注意事项。
2.2 控制器硬件选型了解常用控制器硬件的选择标准。
掌握控制器硬件选型的方法和依据。
2.3 控制器硬件电路设计实例分析具体的控制器硬件电路设计实例。
学习如何设计控制器硬件电路,并进行仿真和测试。
2.4 控制器硬件调试与优化探讨控制器硬件调试和优化的方法和技巧。
学习如何解决控制器硬件设计和实施过程中出现的问题。
第三章:微型计算机控制系统的软件设计3.1 控制器软件设计基础分析控制器软件设计的基本要求和原则。
掌握控制器软件设计的步骤和注意事项。
3.2 控制器软件选型了解常用控制器软件的选择标准。
掌握控制器软件选型的方法和依据。
3.3 控制器软件编程语言介绍常用的控制器软件编程语言。
学习如何选择合适的编程语言进行控制器软件开发。
3.4 控制器软件开发实例分析具体的控制器软件开发实例。
学习如何进行控制器软件开发,并进行调试和优化。
第四章:PID控制算法及其实现4.1 PID控制算法概述解释PID控制算法的定义和原理。
探讨PID控制算法的优点和局限性。
4.2 PID控制算法的数学模型分析PID控制算法的数学模型。
学习如何建立和求解PID控制算法的数学模型。
计算机控制技术课件+于海生
n i i 1 n
得
2
Z[ y(k 2) 1.5 y(k 1) 0.5 y(k )] 0
2 1
z [Y ( z) y(T ) z y(2T ) z ] 1.5z [Y ( z) zy(T )] 0.5Y ( z) 0
于海生计算机课件计算机基础课件计算机网络基础课件计算机图形学课件计算机网络课件计算机应用基础课件计算机病毒课件计算机的组成课件小学计算机课件
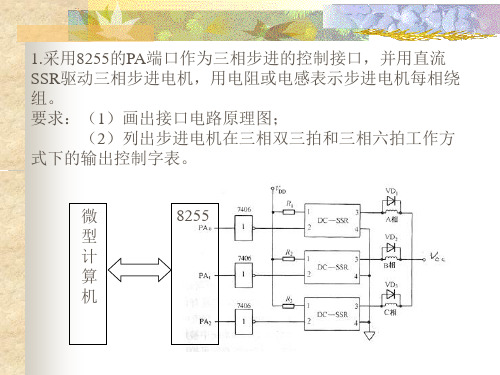
1.采用8255的PA端口作为三相步进的控制接口,并用直流 SSR驱动三相步进电机,用电阻或电感表示步进电机每相绕 组。 要求:(1)画出接口电路原理图; (2)列出步进电机在三相双三拍和三相六拍工作方 式下的输出控制字表。 微 型 计 算 机
s
U ( z) 2.7 z 0.7 2.7 0.7 z 1 D( z ) E ( z ) 1.85 z 0.15 1.85 0.15 z 1
U ( z )(1.85 0.15 z 1 ) (2.7 0.7 z 1 ) E ( z )
U ( z )(1.85 0.15 z 1 ) (2.7 0.7 z 1 ) E ( z ) 1.85U ( z ) 0.15 z 1U ( z ) 2.7 E ( z ) 0.7 z 1 E ( z )
1 e ( z ) 1 ( z ) [ (1 ai z 1 )](1 z 1 ) q F1 ( z ) (1 z )
v j i 1
1 ( z ) z d [ (1 bi z 1 )]F2 ( z ) f 21 z
u
ቤተ መጻሕፍቲ ባይዱ
微型计算机控制技术方案课件

contents
目录
• 微型计算机控制技术概述 • 微型计算机控制系统设计 • 微型计算机控制系统的硬件设计 • 微型计算机控制系统的软件设计 • 微型计算机控制系统的调试与测试 • 微型计算机控制系统应用案例分析
01
微型计算机控制技术概述
微型计算机控制技术的定义与特点
控制器
是微型计算机控制系统的核心,负责发出控 制信号,控制被控对象的工作。
输入输出接口
实现控制器与被控对象之间的信号传输和控 制。
传感器
用于检测被控对象的参数,如温度、压力、 流量等。
执行器
根据控制信号,驱动被控对象进行工作。
微型计算机控制系统的设计流程
系统需求分析
明确控制系统的要求 和目标,了解被控对 象的工作原理和工艺 流程。
实现算法
将算法用编程语言实现,如C语言、汇编语言等。
人机交互界面的软件实现
选择界面设计工具
根据系统需求,选择合适 的人机交互界面设计工具 ,如Visual Studio、Qt等 。
设计用户界面
根据需求设计用户界面, 包括菜单、按钮、文本框 等元素。
实现用户界面
将用户界面用编程语言实 现,如C#、Python等。
人机交互界面设计:菜单、按 钮、文本显示等。
Qt/Embedded与微型控制器的 通信:串口、SPI、I2C等总线 接口,实现数据传输与控制指 令下达。
界面测试与调试:在目标板上 进行实际运行测试,验证界面 功能与控制效果。
04
微型计算机控制系统的软件设计
控制算法的设计与实现
确定控制算法
根据系统需求,选择合适的控制算法,如PID控 制、模糊控制等。
《微型计算机控制技术》于海生第1章PPT课件

2)其它性能: 并行操作、地址/数据线复用、支持64位寻址等。
计算机控制技术
3)PCI总线信号定 义
主控设备49条,目标设 备47条,可选引脚 51条 (主要用于64位扩展、中断 请求、高速缓存支持等), 总引脚数 120条(包含电源、 地、保留引脚等)。
计算机控制技术
2 外部总线
1)RS-232串行通信总线
引脚号 1 2 3 4 5 6 7 8 9 10 11 12 13
功能 保护地 发送数据 接收数据 请求发送(RTS) 允许发送(CTS,或清除发送) 数传机(DCE)准备好 信号地(公共回线) 接收线信号检测 (保留供数传机测试) (保留供数传机测试) 未定义 (辅信道)接收线信号检测 (辅信道)允许发送(CTS)
引脚号 14 15 16 17 18 19 20 21 22 23 24 25
功能 (辅信道)发送数据 发送信号无定时(DCE为源) (辅信道)接收数据 接收信号无定时(DCE为源)
未定义 (辅信道)请求发送(RTS)
数据终端准备好 信号质量检测 振铃指示
数据信号速率选择(DTE/DCE为源) 发送信号无定时(DTE为源) 未定义
给定
输入 通道
计算机
输出通道 D/A
被控量 对象
y
输入通道 A/D
计算机控制技术
2. 在线方式和离线方式
在线方式(on-line): 生产过程和计算机直接连接,并受计 算机控制的方式称为在线方式或联机方式。
离线方式(off-line): 生产过程不和计算机相连,且不受计 算机控制,而是靠人进行联系并做相应操作的方式称为离线方 式或脱机方式。
微型计算机控制技术于海生
yR y x xR
如果在校准时,计算并存放 yR / xR 的值,则测量 校准时,只需行一次乘法即可。有时也可用yi代替yR 人工自动校准特别适于传感器特性随时间会发生 变化的场合。如常用的湿敏电容等湿度传感器。
6.1.3 高级语言I/O控制台编程
对于PC总线工业控制机,我们以Turbo C为例来说明其访问I/O端口 的编程。 Turbo C通常有库函数,允许直接访问I/O端口,头文件〈conio.h〉 中定义了I/O端口例程。 例如: a=inportw(0x210) b=inportb(0x220) 第一条指令表示将端口210H的16位二进制数(一个字)输入给变量a, 第二条指令表示将端口220H的8位二进制数(一个字节)输入给变量b。在 C语言中,0x起头的是16进制数。 又如: outportw(0x230,0x3435) outportb(0x240,0x26) 第一条指令表示将二字节数3435H输出到端口230H中,第二条指令 表示将单字节数26H输出到端口240H中。
6.2.1
误差自动校准
系统误差定义:是指在相同条件下,经过多次测量,误差的 数值(包括大小符号)保持恒定,或按某种已知的规律变化的 误差。 特点:在一定的测量条件下,其变化规律是可以掌握的, 产生误差的原因一般也是知道的。 方法:偏移校准在实际中应用最多,并且常采用程序来 实现,称为数字调零。 数字调零:在测量时,先把多路输入接到所需测量的一 组输入电压上进行测量,测出这时的输入值为x1,然后把多路 开关的输入接地,测出零输入时A/D转换器的输出为x0,用x1 减去x0即为实际输入电压x。图6-3 除了数字调零外,还可以采用偏移和增益误差的自动校 准。
微型计算机控制技术第3章PPT课件
而第1、2、3列处于低电平时,第2行却处在高电
平,由此可判定按下的键应是第2行与第0列的交
叉点,即8号键。
19
退出
微机控制技术
第三章:人机交互接口
3.1.2.3 矩阵键盘接口
2.按键的识别——反转法
在键盘扫描程序中,首先使所有列线全输出“1”,行线输出“0”然后 读取行线状态,若有行线变为“1”,则记录行号;
3.1.1.1 机械式开关
对K0 – K2三个开关的断开 和闭合状态的组合,还可以获 得8个不同的电平信号,通过 应用程序,向单片机输入8个 不同的命令信号或数据。由于 这种开关一次设置后能一直保 持,在很多单片机应用系统中, 使用这种开关来向系统输入某 些固定不变的常数。
也可以通过单片机扩展电路 来设计开关接口电路。如图所 示是通过74LS244电路来进行 设计的。
1.按键的结构及原理
矩阵式键盘由行线和列线组成,按 键位于行、列线的交叉点上,其结构 如图所示。 由图可知,一个4×4的行、列结构 可以构成一个含有16个按键的键盘。 矩阵式键盘中,行、列线分别连接到 按键开关的两端,行线通过上拉电阻 接到+5V上。当无键按下时,行线处 于高电平状态;当有键按下时,行、 列线将导通,此时,行线电平将由与 此行线相连的列线电平决定。这是识 别按键是否按下的关键。
第三章:人机交互接口
整体 概述
一 请在这里输入您的主要叙述内容
二
请在这里输入您的主要 叙述内容
三 请在这里输入您的主要叙述内容
2
微机控制技术
第三章:人机交互接口
3.1
按键设计
3.1.1 开关接口设计 3.1.2 按键接口设计 3.1.3 击键类型分析
3 退出
微机控制技术
《微型计算机控制技术》于海生第章
1.模块化程序设计
(1) 首先对最低层模块进行编码、测试和调试。这些模块正 常工作后,就可以用它们来开发较高层的模块。这种方法 是汇编语言设计常用的方法。 (2) 首先对最高层进行编码、测试和调试。为了测试这些最 高层模块,可以用“结点”来代替还未编码的较低层模块, 这些“结点”的输入和输出满足程序的说明部分要求,但 功能少得多。 该方法一般适合用高级语言来设计程序。
除了数字调零外,还可以采用偏移和增益误差的自动校准。
1.全自动校准
自动校准:自动测量基准参数,计算误差模型,获得并存储误差补偿因子。
先把开关接地,测出这时的输入值x0,然后把开关接基准电
压VR,测出输入值x1,并存放x1、x0,在正式测量时,如测
出的输入值为x,则这时的V可用下式计算
V
(
x x0 x1 x0
第一条指令表示将二字节数3435H输出到端口230H中,第二条指令 表示将单字节数26H输出到端口240H中。
6.2 测量数据预处理技术
传感器把生产过程的信号转换成电信号,然后用A/D转换器 把模拟信号变成数字信号,读入计算机中。
对于这样得到的数据,一般要进行一些预处理,其中最基本 的处理有线性化处理、标度变换和误差自动校准。
y yR x xR
如果在校准时,计算并存放yR/xR的值,则测量校 准时,只需行一次乘法即可。有时也可用yi代替yR
人工自动校准特别适于传感器特性随时间会发生变 化的场合。如常用的湿敏电容等湿度传感器。
6.2.2 线性化处理和非线性补偿
1.铂热电阻的阻值与温度的关系
离线计算温度与铂热电阻阻值对应关系表即分度表, 然后分段进行线性化。
2.热电偶的热电势与温度的关系
微型计算机控制技术第二章3 共65页PPT资料
START CLK
IN7 IN6 IN5 IN4 IN3 IN2 IN1 IN0
A B C ALE
控制逻辑
8选1 模拟 多路 开关
Ui 比
UO
较 器
逐次 逼近 寄存器
三态 输出 锁存器
地址 锁存器 译码器
开关数组 电阻分压器
EOC
D7 D6 D5 D4 D3 D2 D1 D0 OE Vcc GND
电压UO(V)
UiUO比 较
该位 去留
(1) 1 0 0 0 (2) 1 1 0 0 (3) 1 0 1 0 (4) 1 0 1 1 结果 1 0 1 1
2.5
Ui>UO 保留
3.75
Ui<UO 去掉
3.125
Ui>UO 保留
3.4375
Ui>UO 保留
误差:3.5V- 3.4375V=0.0625V
量化单位:q5V5V0.312V5
24 16
当最高位为“1”时,Uo=?
Uo=0.3125V×23=2.5V, Ui> Uo,最高位保留。 依次类推,给定输入3.5V电压时对应的逐次比较过 程如下:
UO=0.3125V×D* Ui=3.5V
步骤
8
UOS=A0R.内31容25V×D*
421
转U换i=后3.5V
2.6.1 逐次逼近式A/D转换原理
• 转换原理:
模拟量输入Ui
+
• 逐位设定 SAR 寄存器
-
Uo
中的数字量,该数字量 经过D/A转换后得到电 数字输出
D/A转换器
参考 电压
压Uo,将Uo与待转换的 输入模拟电压Ui进行比 较。根据比较结果,修