9操纵机构设计
船舶操纵系统图解

第一节 操纵系统概述
为了满足船舶在各种工况下的航行需要,将船舶主机的起动、换向和调速等各装置联结成一个 统一整体,并可集中控制的所有机构、设备和管路,总称为柴油机推进装置的操纵系统。
小型柴油机的推进装置,其起动、调速及换向系统的控制件距离近,通常分别设置,各自操纵。 近年来不少船舶也通过机械、气动等型式传输集中至机舱集控台或驾驶室,对推进装置集中操纵。 大、中型柴油机为操纵方便和工作可靠,都将各控制部分通过各种方式有机地联系以便集中控制和 远程控制。
一、对操纵系统的要求
在船舶柴油机中,操纵部分是最复杂的一部分,其部件多、零件杂、相互牵连制约,近代自动 化技术和遥控技术在操纵系统的应用,更增加了操纵系统的复杂程度。为了保证操纵系统能够可靠 地工作,对船舶柴油机的操纵系统有下列基本要求:
(1)必须能迅速而准确地执行起动、换向、变速和超速保护等动作,并能满足船舶规范上相 应的要求。
三、操纵系统和遥控系统的类型
1. 操纵系统的类型 按操纵部位和操纵方式,操纵系统可以分为: 1)机旁手动操纵:操纵台设置在柴油机旁边,使用相应的控制机构操纵柴油机,由轮机员直 接手动操纵,使之满足各种工况下的需要。 2)机舱集中控制室控制:操纵台设置在机舱适当部位的专用控制室内,由轮机员对柴油机实 现操纵和监视。 3)驾驶室控制:在船舶驾驶室内,专设主机遥控操纵台,由驾驶员直接操纵柴油机。 机旁手动操纵是操纵系统的基础,机舱集中控制和驾驶台控制均称为遥控,三者之间常设有转 换装置以便随意转换。每种操纵台上均设操纵手柄,操纵部位转换开关、应急操作按钮及各种显示 仪表,以便对主机进行操纵和运行状态的监视。尽管目前主机遥控技术已经达到了相当高的水平, 但系统中仍然必须保留机旁手动操纵系统,以保证对主机的可靠控制。 2.遥控系统的类型 遥控系统是用逻辑回路和自动化装置代替原有的各种手动操作程序。按遥控系统所使用的能源 和工质,主机遥控系统可分为: 1)电动式遥控系统:以电作为能源,通过电动遥控装置和电力驱动装置对主机进行远距离操 纵。 该系统控制性好,控制准确,遥控距离不受限制,有利于远距离控制;设备简单,不需要油、 气管路,无油、气处理装置,不必担心漏油、漏气;易实现较高程度的自动化,是实现主机遥控的 最佳途径。缺点是管理水平要求高,故障不易发现,操作管理人员要具备一定的电子技术知识。 2)气动式遥控系统:以压缩空气为能源,通过气动遥控装置和气动驱动装置对主机进行远距 离操纵。 气源可直接由起动空气经减压、净化得到,信号传递距离较远,一般在 100 米以内可满足系统 的控制要求,信号受电气、振动、温度等干扰少,动作可靠,故障容易发现,维修方便。但该系统 气源净化品质要求高,需除水、除油、除尘,否则易使气动元件失灵。 3)液力式遥控系统:以油泵产生的压力油作为能源,通过液压阀件和液动机构进行控制。
飞机操纵系统的组成

飞机操纵系统的组成
飞机操纵系统由主操纵系统和辅助操纵系统组成。
主操纵系统主要用于控制飞机的升降舵、副翼和方向舵,而辅助操纵系统则包括调整片、襟翼、减速板、可调安定面和机翼变后掠角操纵机构等,用于控制飞机的运动状态。
主操纵系统通过驾驶杆和脚蹬来控制飞机的升降舵、副翼和方向舵的操纵机构,以控制飞机的飞行轨迹和姿态。
中央操纵机构由驾驶杆和脚蹬组成,通过传动装置直接偏转舵面,传递操纵信号。
辅助操纵系统则包括调整片、襟翼、减速板、可调安定面和机翼变后掠角操纵机构等。
这些机构仅靠驾驶员选择相应开关、手柄位置,通过电信号接通电动机或液压作动筒来完成操作。
此外,机械操纵系统还包括驾驶员通过机械传动装置直接偏转舵面的部分。
这种系统由两部分组成:位于驾驶舱内的中央操纵机构和构成中央操纵机构和舵面之间机械联系的传动装置。
飞机操纵系统的组成因飞机类型和设计而异,但上述部分是常见于现代飞机的操纵系统的重要组成部分。
随着技术的发展,一些新型的飞机还采用了电传操纵系统和主动控制技术等更先进的技术。
法士特9档变速箱RT11509C

α α
滑套
主轴齿轮
主轴
•图5 换档机构
由于RT-11509C变速器是多档位变速器(9个前进档),各档间的速比级差 小,只有1.3左右,所以工作时相邻档位之间的转速差也小,因此变速器换 档时轻便、自如、平稳。
CONFIDENTIAL
中间轴制动器
中间轴制动器装在主变速器壳体的右侧(向汽车前进方向看),其构造如 图11所示。中间轴制动器被广泛地应用于装用推式离合器的传动系中。
8. 取力形式多样,配置有前取力器、后取力器、底取力器、侧取力器,可满足公路重载、 自卸车、牵引车、越野车、汽车起重机、矿用车等各种车辆的使用要求。
CONFIDENTIAL
动力传递路线图
倒档
CONFIDENTIAL
动力传递路线图
L档
CONFIDENTIAL
动力传递路线图
1档
CONFIDENTIAL
取力器 侧取力器
动力从主箱中的右中间轴上 的取力齿轮输出
CONFIDENTIAL
取力器
后取力器及 底取力器
动力分别从主箱中左下方的 中间轴上的取力齿轮及从副 箱加长中间轴输出
CONFIDENTIAL
取力器
后取力器
采用“后取力”时,为了实现停车取 力,必须将副变速器挂在空档位置。 为了解决这一问题,只需将变速器范 围档气缸盖去掉,加装一个空档位置 气缸即可。图12为空档位置气缸结构 图,图示位置为空档位置。 在图12中,孔口A和B分别接变速器的 低档和高档气管,与变速器的双H气 阀相连,气压为4.1~4.4bar,孔口C 是使变速器处于空档(中间)位置时
范围档
速比代号 前进档位
双中间轴结构
设计级别 ×136=名义输入扭矩(N.m.)
法士特9JS119变速箱讲述
双H操控机构
概述
法士特9JS119
法士特变速器 是由两个单独的 副箱 变速器组成的一 个整体装置 主箱是由换档 杆操纵的六对齿 轮副组成 副箱是由气压 主箱 操纵的两对齿轮 副实现范围档换 档
概述
法士特9JS119
主副箱均为双中间 轴传动,主轴和主轴 齿轮浮动
说明:该变速器为常啮合式 变速器。工作过程中,虽然 只有部分齿轮传动功率,但 所有齿轮都转动。
3、实现汽车倒驶。由于内燃机是不能 反向旋转的,利用变速器的倒挡,实现 汽车的倒向行驶
概述
分 类
按传动比的变化 方式分类
按操纵方式不同 分类
有级式变速器 无级式变速器
综合式变速器
手动操纵式变速器:靠驾驶员 直接操纵变速杆进行换档 自动操纵式变速器:其传动比 的选择和换档是自动进行的 半自动操纵式变速器
法士特9JS119变速箱
压裂一队 张红梅
概述 使用 维护 故障
目录
概述
变速箱的功用
1、实现变速、变矩。通过改变传动比, 扩大驱动轮转矩和转速的变化范围,以 适应经常变化的行驶条件,同时使发动 机在有利的工况下工作
2、必要时中断传动。利用变速器中的 空挡,中断动力传递,使发动机能够起 动和怠速运转,满足汽车暂时停车或滑 行的需要
没有选装中间轴制动器的车辆起步有时会发生挂档异响的 现象,其实起步时将离合器踏板踩下后多停顿3 至5 秒然后再 挂档,也可以达到平稳起步的目的。
中间轴制动器仅在起步时使用。使中间轴转速很快降低, 便于车辆平稳挂档起步
概述
同步器
主箱内没有同步 器,主轴滑套通过 渐开线花键套在主 轴上,移动滑套使 滑套结合齿与主轴 齿轮的内结合齿啮 合传递动力 副箱内装有锁销 式惯性同步器。其 动作由横向换档杆 与双H 气阀联动控 制。由副箱换档气 缸来操纵,仅在高 低档转换时才工作。
Fendt公司900Vario系列拖拉机
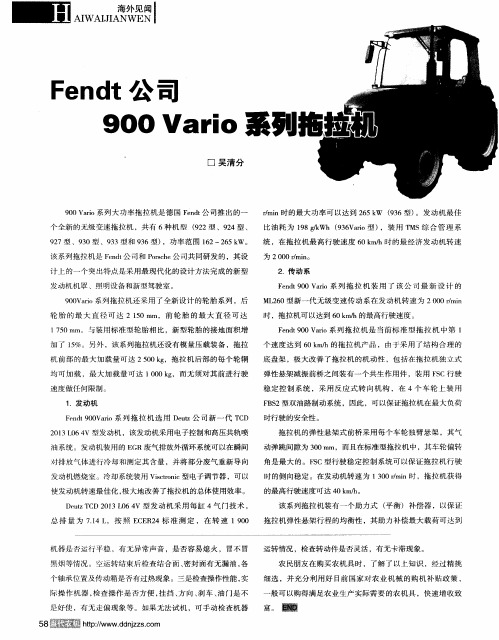
个速 度达 到 6 m h的拖拉 机产 品 ,由于采 用了结构 合 0k /
底 盘 架 ,极 大 改 善 了拖 拉 机 的 机 动 性 ,包 括 在 拖 拉 机 独
弹性悬架 减振前桥之 间装有一个 共生作用件 ,装用 F C S
稳 定 控 制 系 统 , 采 用 反 应 式 转 向 机 构 ,在 4个 车 轮 上
9 0 ai 0V r o系列拖拉机 还采用 了全新设计 的轮胎 系列 ,后 轮 胎 的最 大 直 径 可 达 210m 5 m,前 轮 胎 的 最 大直 径 可 达
1 5 m。 与 装 用 标 准 型 轮 胎 相 比 ,新 型 轮 胎 的接 地 面 积 增 0i 7 l l
ML 6 2 0型新一代无 级变速传 动系在发 动机转 速为 20 0n 0 时 ,拖拉机可 以达到 6 m h的最 高行 驶速度。 0 / k
的 最 高 行 驶 速 度 可 达 4 mh 0k /。
使发动机转速最佳化 , 极大地改善了拖 拉机的总体使用效率 。 D uz C 0 3L 64 et T D2 1 0 V型发动 机采 用每缸 4气 门技 术 , 总 排 量 为 71 ,按 照 E E 2 .4L C R 4标 准 测 定 ,在 转 速 19 0 0
的操 纵 模 快 。
F n t 0 a o系 列拖 拉机 装用 X ed 0V f 9 i 5型新 型豪 华型 驾驶
室 ,驾驶室采用 5立柱式 ,其 弹性悬架和各操纵 机构均为全 新设计。 驾驶室 内活动 空间大 ,提 高了驾驶操纵舒适 性。装用 的 玻璃面积大 ,可 以保证 各个方 向的视野 。驾驶室前 窗的着色 玻璃上有嵌入式雨刷 ,侧窗玻璃 的设 计极具特色 。驾驶室均 装有 自动空调设备。 驾驶座位设计 为可 以正反两 个方向布置 ,并 成整体式结 构。拖拉机操纵元件 和控制机构 均可随座椅位置 而摆动 。座 椅反 向布置后 ,拖拉机 前进挡和倒退 挡的操纵方式不 变 ,不 影响驾驶 操纵舒适性 。 新 型驾驶室还采用 全新设计 的弹性悬架 ,采用 3点悬架 结构 ,可 以保证驾驶室 对各种机械应 力的减振作用 和降低噪
第五章 飞机飞行操纵系统

Page34
五、飞机飞行操纵系统的传动系数、传动比及非线 性传动机构
㈠ 操纵系统的传动系数 舵偏角△δ与杆位移△X的比值
飞机结构与系统
Page35
㈡ 操纵系统的传动比
飞机结构与系统
Page36
㈢ 改变传动比和传动系数的机构 ——非线性传动机构
❖传动系数不变的操纵系统, 不能满足对飞机操纵性的要求:
飞机结构与系统
Page50
颤振
弹性结构在气动力 和惯性及自身弹性 结构力的作用下, 由于作用力相互耦 合而形成的剧烈自 激振动。
飞机结构与系统
Page51
颤振的形式
机翼弯曲扭转颤振 机翼弯曲-舵面偏转颤振 操纵面本身颤振
飞机结构与系统
Page52
机翼的弯扭颤振 • 由于机翼扭转而产生激振力
飞机结构与系统
脚操纵机构有脚蹬平放式和脚蹬立放式两种。
飞机结构与系统
Page18
㈡ 脚操纵机构
脚操纵机构有脚蹬平放式和脚蹬立放式两种。 脚蹬平放式脚操纵机构
平行四边形机构保证脚蹬只做平移而不转动
飞机结构与系统
Page19
脚蹬立放式脚操纵机构
之一
飞机结构与系统
之二
Page20
四、传动机构的构造和工作原理 四、传动机构的构造和工作原理
飞机结构与系统
Page22
摇臂的作用
• 支持传动杆 • 改变传动力的大小 • 改变位移 • 改变传动速度 • 改变传动方向 • 实现差动操纵
飞机结构与系统
2、摇臂 摇臂通常由硬铝材料制成,在与传动杆和支
座的连接处都装有轴承。
⑴ 放大或缩小力的作用
飞机结构与系统
nF
教案9变速器构造(操纵和分动器)
欲换倒档时,须用较大的力向一侧摆动变速杆,压缩倒档锁销弹簧后才能换入倒档档。其拨叉轴控制警告灯亮和报警器响(有的汽车仪表盘上有倒档指示灯)。
第二讲:5分动器P51
5.1、分动器的功用
越野汽车因多轴驱动而装有分动器。它的功用是将变速器输出的动力分配到各驱动桥。其基本结构也是齿轮传动系统。输入轴直接或通过万向传动装置与变速器第二轴相连,其输出轴有若干个,分别经万向传动装置与各驱动桥连接。目前大多数越野汽车装用两档分动器,兼起副变速器的作用。
5.2、分动器的构造
1)齿轮传动机构
分动器的齿轮传动机构是由若干齿轮、轴和壳体等零件组成。有的还装有同步器。
①3个输出轴式分动器。图3-32为3轴式2档分动器,其结构简化为图3-33。分动器单独安装在车架上,其输入轴1用凸缘通过万向传动装置与变速器第二轴连接。输出轴8、12、17分别经万向传动装置通往后、中、前驱动桥。
分动器的降速增矩作用比变速器大,将接合套4左移与齿轮15的齿圈接合时为高速档,右移与齿轮9的齿圈接合为低速档。动力从轴8和12同时输出,后桥和中后桥便被接上。
将接台套16右移,轴17和12相连接,便接上了前驱动桥。
②两个输出轴式分动器。两轴式分动器用于轻型越野汽车,即前、后桥都为驱动桥。齿轮传动机构常采用普通齿轮式和行星齿轮式两种。普通齿轮式的工作原理与前述3轴式分动器类似。只把行星齿轮式分动器介绍如下:
互锁装置有钉、板式,球销式和摆板滑槽凸面式。
①钉、板式互锁装置:图3-35,这种装置在前桥操纵杆上装有螺钉或铁板,与换档操纵杆互相锁止。多用于两拨叉轴距离较远的操纵机构。
②球销式互锁装置。如图3-36所示。两根拨叉轴之间装有互锁销,与轴上的凹槽对准时(即接上前桥驱动后),轴才能向左移动换人低档,同理应先退出低档后,才能摘下前桥驱动。
CA6140型车床主轴箱操纵机构及轴的毕业设计(可编辑)

摘要此次毕业设计要求综合的运用机械制图、机械设计、机械原理、机械制造技术、金属切削机床设计等相关知识对CA6140型卧式车床进行了传动设计,主要对其主轴箱的结构和传动原理进行深入的了解。
CA6140车床是我国设计制造的典型的卧式车床,在我国机械制造类行业中使用极为广泛。
近些年,虽然随着电子计算机的发展,数控技术和数控机床得到的较大的发展,但通过对普通车床的研究和设计,可以开阔我们的视野,增强我们的实践经验,加强我们自己动手的工作能力,巩固所学知识,在我们马上要走上工作岗位之际,对提高我们的专业素质有很大的帮助。
本次毕业设计的研究内容、方法、成果:1、通过绘制车床主轴箱操纵机构的装配图,进一步深入的了解了主轴箱的结构和其传动原理;2、通过运用机械原理和机械设计等知识对车床进给箱中的轴进行设计和校核;3、最后运用机械制图知识绘出CA6140型卧式车床主轴箱操纵机构,并运用AutoCAD制图软件绘制进给箱中的014轴,进一步熟练了CAD的使用。
关键词:CA6140型车床;主轴箱;传动系统;轴的设计;轴的绘制;ABSTRACTThe integrated design uses a mechanical drawing,mechanical design, mechanical principles, machinery manufacturing technology, Metal Cutting Machine design knowledge to CA6140 horizontal lathe design of the drive, Headstock mainly on the structure and box drive principle in-depth understanding. CA6140 lathe is the design and manufacture of a typical horizontal lathe. China's machinery manufacturing industries, is widely used. In recent years, although the development of electronic computers, technology and CNC machine tool CNC is the larger development, But through Lathe of research and design, broadening our horizons, enhance our practical experience, strengthen our own hands the ability to consolidate knowledge, we all got to go to work when to improve the professional quality of our great helpThe graduation of the study design, methods, results :1. Drawing spindle lathes me through manipulation of the assembly, further in-depth understanding of the structure of the spindle box and its drive principle2. Through the use of mechanical principles and mechanical design knowledge to design and check the shaft in lathe3. Finally the use of AutoCAD software rendering the machine spindle and operating mechanism , and the use of CAD to render the 014 shaft in lathe;Further skilled in the use ofCADKeywords : CA6140 lathe; Headstock; Transmission; Axis designs; Axis drawing.目录第一章绪论 11.1 毕业设计的目的及意义 11.2毕业设计的内容 11.3设计步骤 21.4设计时应注意的事项3第二章 CA6140型卧式车床的简介 42.1 CA6140车床的用途 42.2 CA6140车床的分类 52.3 CA6140工艺范围52.4 CA6140车床的布局 5第三章 CA6140型车床传动系统83.1车床传动路线及传动分析83.2 主轴箱的传动链 103.3 主轴箱的主要构造12第四章 CA6140型车床齿轮传动设计184.1分级变速传动链设计184.2动力计算224.3计算转速244.4机床的功率转矩特性24第五章 CA6140型卧式车床主轴箱结构设计265.1轴的设计及轴上零件的定位265.2 轴承、密封、润滑285.3齿轮305.4操纵机构315.5箱体34第六章 014轴(ⅩⅢ轴)的设计计算及校核396.1轴的结构设计原则396.2轴的强度计算406.3轴的材料及选择416.4 014轴(ⅩⅢ轴)的设计计算及校核45参考文献50致谢 51第一章绪论1.1 毕业设计的目的及意义毕业课题(论文)教学过程是实现本科培养目标要求的重要阶段,是基础理论学习深化与升华的重要环节,是全面检验学生综合素质与实践能力培养效果的主要手段,是学生毕业及学位资格认证的重要依据,是衡量高等学校教育质量和办学效益的重要评价内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3)按被操纵件的受力状况,可分为偏侧作用式操纵机构和对称作用式操纵机构。
偏式操纵机构如图8.2所示,滑块或拨叉是从滑动齿轮一侧拨动滑移齿轮,因此滑移齿轮在被推动的过程中受偏转力矩。有时,为了防止自锁,可采用对称作用式操纵机构,如图8.3所示。
主要介绍单独式操纵机构的设计。
9.2单独式操纵机构的设计
单独式操纵机构中常见的有摆动式操纵机构、移动式操纵机构、套装式结构、对称作用式结构、轴心拉杆式机构。本节主要介绍摆动式操纵机构。
2)停止按钮必须安置在最方便的位置且醒目,以便紧急停车时用。
3)对于相互干涉的运动,应有互锁装置,以保证在操作出现误动作时,不发生事故。例如,车床上溜板的机动进给与开合螺母必须互锁,丝枉与光杠的传动必须互锁,否则在机动进给时如果合上开合螺母,将损坏机床。
4)变换及换向用的操纵机构必须可靠定位,以免工作过程中自动松开。
9.2.1摆动式操纵机构
图8.2所示为摆动式操纵机构,当转动手柄4时,经转动轴5、摆杆3、滑块2即可使滑移齿翻沿着轴向移动。这种机构的结构简单,应用很普遍。其缺点是摆杆摆动时,端部滑块的运动轨迹是半径为R的圆弧,因此滑块在齿轮环形槽内相对于滑移齿轮轴线会产生偏移量a,如图8.4所示。a越大,操纵越费力,而且滑块有脱离齿轮环形槽的可能,所以在设计摆动式操纵机构时应力求减少偏移量a。
(4)中间传动装置
当操纵力较大或被操纵件距离较远时,应加中间传动装置,如齿轮、链轮、杠杆等。因操纵力过大而设置传动装置时,传动比应小于1;因距离较远设置传动装置时,传动比常取为1。
9.2.2移动式操纵机构
当滑移齿轮移动距离较大时,可采用移动式操纵机构。;
移动式操纵机构是通过带导向杆或带导向孔的拨叉、轴心拉杆拨销来拨动被操纵件的,这种机构用于操纵行程较大的滑移齿轮。图8.5所示为带导向孔拨叉的移动式操纵机构,手柄1经轴2、齿扇3、齿条4,使带导向孔的拨叉6在导向杆5上移动来控制滑移齿轮,实现变速,轴2与拨叉6之间的传动也可以用齿轮齿条、拨销滑块等。
2.回柱销定位
图8.7所示为圆柱销定位机构。操纵时,首先将手柄1向外拉,拨出圆柱销2,转动手柄到所需的变速位时,在弹簧3的作用下,圆柱销进入另一个销孔定位。这种方式定位可靠,结构简单,但操纵不如钢球定位方便,一般用在定位可靠性要求较高的情况下。
3.锥销定位
图8.8所示为锥销定位机构,操作原理同上述,适用于要求定位精度高,且定位可靠的情况,但结构复杂,一般用在对定位精度要求比较高的场合,如铣床分度头转换手柄等。
9.3.3操纵机构中的互锁装置
1.旋转运动间的互锁
图8.12a所示为用于平行轴间的间距较小时的互锁装置。两个手柄轴上各装有一个带缺口圆盘,在图示位置时,只能左边的轴转动,右边的轴被锁住。只有当两圆盘的缺口相对时,右边轴才可以转动,一旦右边的轴转动时即将左边的轴锁住。
图8.12b所示为增加了一个中间构件。当圆柱销嵌入右边圆盘的销孔而锁住右边的轴时,左边的轴才能转动。反过来,只有当圆柱销嵌人左边圆盘的销孔而锁住左边的轴时,右边的轴能转动。
4.槽口定位
如图8.9所示,操作时将手柄1向外拉,将插销拔出,然后转动手柄到所需的变速位置,在弹作用下齿条轴2复位,同时手柄1也被齿条轴推动复位,使凸块插入槽口定位。这种方法定位可靠,使用方便,但结构复杂,一般用在要求定位可靠的场合。
9.3.2定位机构安装位置对定位精度的影响
定位机构的安装位置可以在操纵件上、执行件上和滑移件上,但对滑移件定位精度的影响不同。
确定θ作图或计算可得摆杆的摆角θ。
检验定位孔间距。根据定位装置的有关尺寸及摆杆的摆角θ,检验两相邻定位孔(坑)之间壁距不得小于2mm(图8.6)。否则可适当减小H值,这时摆角将增大,但须使θ≤60°-80°。
校核不自锁条件。
方案设计完毕即可进行操纵机构的结构设计。设计单独操纵机构时,因摆动式结构简单应优先选择。若L/H比值过大无法采用时可改用移动式操纵方案。
(1)轻便省力
为了减轻工人的劳动强度,手轮和手柄的操纵力不应超过GB 9061关于操纵力的规定。可采取以下措施:
1)选择合适的传动比、杠杆比,适当加长操纵手柄或加大手轮直径。
2)将常用的操纵件布置在人手所及的便于操纵的区域,还要根据具体情况就位,不应过高、过低或过远。
3)根据具体情况采用电力、液压或气动控制。
从图8.4c中可知:
上述两式平方相加:
整理后可得
H值不宜过小,否则在滑移距离L一定的情况下,滑块偏离量a将增大,为了保证滑块正常工作,要求a≤0.3b(b为滑块长度)。H值亦不可过大,否则因摆角θ过小,使操纵机构准确定位有困难,而且结构也不紧凑。
(3)防止自锁
为了保证滑块能拨动滑移齿轮,即操纵机构不发生自锁,设计时应保证使C满足下列条件:C/B<1
3操纵机构的定位和互锁
徐 州 工 程 学 院 教 案 纸
第9章操纵机构设计
9.1概述
9.1.1操纵机构的功用和基本要求
专机的操纵机构用于控制各执行件的起动、停止、制动、变速、换向以及控制各种辅助运动,如转位、定位、送料及夹紧等。操纵机构虽不直接参与专机的工作运动,对专机的精度、刚度等不产生直接影响,但对专机的布局、使用性能、生产率及外观造型等都有一定的影响。因此,在确定专机总体方案时应对操纵机构力口以考虑,并与相关部件一起进行结构设计。对操纵机构通常应满足以下几个方面的要求:
图8.11a所示是将定位孔设计在齿轮轴上,使装配、调整比较方便,但有时定位不够可靠。为防止滑移件在滑移过程中超程,在行程终点处装上限程挡圈。
图8.11b所示的双钢球结构,将定位孔设计在滑移齿轮上,定位可靠,但调整不够方便。
操纵机构虽具有定位装置,但在操纵过程中也会发生被操纵件超越两端定位的现象,可能与零件相碰,造成磨损甚至破坏。因此,为了防止被操纵件越位,除了本身具备限位作孔盘)外,都需要安装限位件,如挡套、弹性挡圈等。
9.3操纵机构的定位和互锁
为保证齿轮的正常啮合运转,机构的定位
操纵机构常用的定位方式有钢球定位、圆柱销定位、锥销定位及槽口定位等。
1.钢球定位
如图8.6所示,钢挡圈2上钻有与各个变速位置相对应的定位锥坑。当变速时,转动手柄至选定的变速位置,则钢球被弹簧推入定位锥坑,实现定位。这种定位方式结构简单,制造、装配方便,成本低,应用普遍。缺点是定位精度差,不太可靠,在机床振动较大或定位精度要求较高的情况下不宜采用。
徐 州 工 程 学 院 教 案
2011年至2012年第一学期第7周星期五
课题名称(含教材章节):第9章操纵机构设计
教学目的和要求:1.了解单独式操纵机构的设计
2.了解操纵机构的定位和互锁
教学重点:单独式操纵机构的设计、操纵机构的定位和互锁
教学难点:单独式操纵机构的设计
教学内容(要点)
1概述
2单独式操纵机构的设计
2)传动装置它将操纵运动从操纵件传给执行件。传动装置有机械的、电气的、气动的、液压的,如拉杆、摆杆、齿轮、齿条、丝杠、螺母、凸轮、液压及电气传动装置等。
3)控制件它控制操纵机构的执行件,使之按要求的方向和行程运动。常用机件有凸轮、孔盘、液压预选阀等。对于结构简单的操纵机构,往往没有独立的控制件,而是由手柄对执行件直接控制,这时操纵件兼作控制件。
3)操纵手柄或捏手的尺寸应与人手相称,不宜过大或过小。通常球柄的球径约为40-50 cm,圆柱形手柄的直径约为30 cm,长度不小于70 cm,且不应过高、过低或过远。设计时可参考GB 4141.1至GB 4141.31所规定的标准形式和尺寸。
4)完成不同控制作用的手柄应有不同的标记,最好采用不同的颜色或形状。
9.1.3操纵机构的分类
1)按一个操纵件所控制的执行件数目,可分为单独式操纵机构和集中式操纵机构。
单独式操纵机构的操纵件只能控制一个执行件。其优点是传动链短、结构简单、制造维修方便、箱内布局容易、安排手柄位置灵活、操纵时顶齿现象少。所谓“顶齿”是指滑移齿轮左右移动时,与固定齿轮的齿顶相碰,不能顺利通过。其缺点是手柄多、不便记忆、操纵不便、总的操纵时间长、操纵劳动量大。
5)尺寸较大、转速较高的手轮在专机运转时应与运动件脱开,以防伤人。
此外,根据专机的特点,对操纵机构应有不同的要求。例如,对于微量进给操纵机构要求操纵准确;对于高生产率机床或在加工过程中需频繁操纵的机构,要求操纵速度快等。
9.1.2操纵机构的组成
操纵机构一般由下述四部分组成:
1)操纵件产生操纵运动或发出操纵信号的机件,如手柄、手轮、捏手、液压操纵阀、电气开关和按钮等,其中大部分已标准化,可选用标准件。
1.定位机构布置在操纵件上
定位机构到滑移件之间的传动环节较多,传动积累误差较大,所以滑移件的定位误差也较大,如图8.6-8.9所示。
2.定位机构布置在执行件(拨叉)上
这种情况传动环节少,积累误差较小,故对滑移件的定位精度影响也较小,如图8.10所示。
3.定位机构布置在滑移件上
显然,这种方式滑移件的位置精度最高,如图8.11所示。
5)开、停操纵,如用按钮控制,按钮水平排列时应为右开左停,上下排列时应为上开下停。如用手柄,则手柄运动方向自左至右或自下而上是开,反之为停。
3)安全可靠
设计操纵机构时,必须保证操作人员和专机的安全。为此,必须考虑:
1)每个操纵件周围需留有足够的空间,以免操纵件之间以及操纵件与专机机壁之间发生翻撞或碰伤人手。
设计摆动式操纵机构时应考虑如下几个方面:
(1)正确选择摆杆转轴的位置
摆杆转轴O应布置在与滑移齿轮左右两极限位置相对称的位置上,使滑块的上、下偏移量a相等,如图8.4a所示。只有在专机结构不允许时,才使摆杆转轴左右偏移(图8.4b),但偏距e不应太大。
(2)合理确定摆杆转轴与滑移齿轮轴线之间的距离
从图8.4c可知,当清移齿轮的移动距离L一定时,H越小,则偏移量e及摆角θ越大,操纵费力;但H过大也会使操纵机构不紧凑,而且摆角θ过小,使准确定位困难。一般θ在600一900之间。通常,在结构设计时先确定滑移齿轮的滑移距离L,根据滑块不脱开齿轮槽来确定a值,再根据G.和a按几何关系求出H的值,然后检查夹角B,调整H值,使B=60°-90°。L,a和H之间的关系推导如下: