导弹六自由度Simulink仿真模型
导弹最优导引律仿真分析(例子)
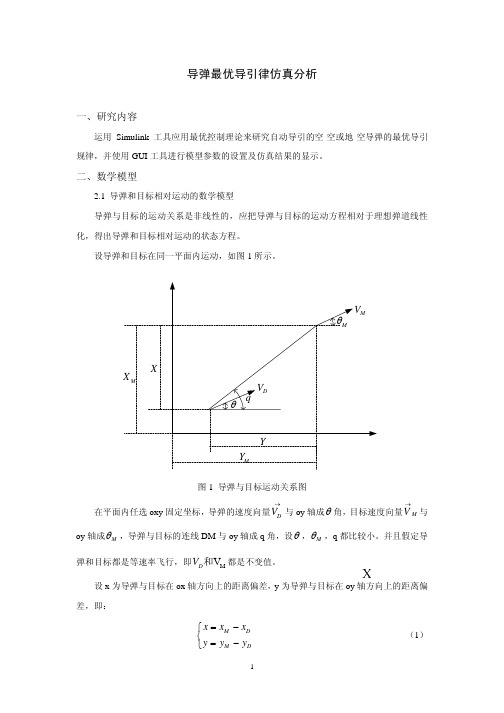
到限制,导弹结构能承受的最大过载也受到限制,所以控制信号 u 应该受到限制,因此,选
择下列形式的二次型指标函数
( ) ( ) ∫ ( ) J = 1 X T 2
tf
CX t f
+ 1 tf 2 t0
X T QX + U T RU dt
⎡c1 0 0 0 ⎤ ⎡0 0 0 0⎤
式中,
C
=
⎢ ⎢
0
c2
0
0
⎥ ⎥
,
Q
=
⎢⎢0
0
0
0⎥⎥
⎢0
⎢ ⎣
0
0 0
c3 0
0⎥
c4
⎥ ⎦
⎢0 0 0 0⎥ ⎢⎣0 0 0 0⎥⎦
2.2.2 最优导引律
(11)
完全考虑弹体二阶振荡环节时,假定目标不机动,导弹运动的状态方程见式(8),即
•
X = AX + Bu
(12)
⎡0 1 0 0 ⎤ ⎡ 0 ⎤
式中, A = ⎢⎢0 0 VD ⎢0 0 0
]
2(t f − t)2 + 6(t f − t)
ω
ω2
−
15 4ω
2
3
]
K3 (t) =
KDVD [(t f
− t)3
3 ω2 3 −
(t f
−t −
3 )2 ω
2(t f ω
− t)2
+
6(t f − t) ω2
−
15 4ω
2
3
]
最优导引方框图如图 3 所示。
6
u(σ )
KDω 2
+
1 s x4 1 s x3 VD +
Simulink仿真教程

9.1.2 建立Simulink仿真模型 a) 打开Simulink模型窗口(Untitled) b) 选取模块或模块组 在 Simulink 模 型 或 模 块 库 窗 口内,用鼠标左键单击所需 模块图标,图标四角出现黑 色小方点,表明该模块已经 选中。 c) 模块拷贝及删除 在模块库中选中模块后,按 住鼠标左键不放并移动鼠标 至目标模型窗口指定位置, 释放鼠标即完成模块拷贝。 模块的删除只需选定删除的 模块,按Del键即可。
2. Sinks 库
该库包含了显示和写模块输出的 模块。双击 即弹出该库的模 块图:
①
:数字表,显示指定模
块的输出数值。
②
:X-Y绘图仪用同一图形窗
口,显示X-Y坐标的图形(需先在
参数对话框中设置每个坐标的变
化范围),当X、Y分别为正、余
弦信号时,其显示图形如下:
第九章 Simulink动态仿真
仿真技术
仿真技术
第九章 Simulink动态仿真
9.2.1 Simulink模块库 3. Continuous 库
③
:分子分母为多项式形式的传递函数。
➢ 双击该模块,弹出传递函数的参数对话框,设置框图中的参 数后,该传递函数显示如下:
仿真技术
第九章 Simulink动态仿真
9.2.1 Simulink模块库 3. Continuous 库
斜坡信号时微分环节的输出:
第九章 Simulink动态仿真
即弹出下图:
仿真技术
第九章 Simulink动态仿真
3. Continuous 库
②
:积分环节。其输出为其输入信号的积分。
➢ 双击该模块,弹出积分器的参数对话框,可设置积分器的复位、 积分上限和下限等。当设置为信号下跳过零复位、积分器限 幅为5时,积分器对谐波输入的输出如图所示:
飞行器六自由度仿真
1 引言现在的战争已不是过去大刀长矛的时代,他早已成为国家综合实力的体现,这很大程度取决于军事高科技。
这其中导弹作为精确打击的利器关乎国家的战略安全。
而研究其包括导弹在内的飞行器精确制导与控制便显得十分的重要。
飞行器最优制导规律研究是进行武器系统总体方案论证和提高制导性能及精度的关键技术之一。
而要进行制导规律最优性研究一方面需要研究合适的制导规律,另一方面需要进行接近实际情况的全面的大量的仿真研究。
仿真验证包括建模与仿真两个方面。
在大型工程的方案论证阶段甚至包括实际研制的各个阶段,都要进行仿真检验以论证可行性、合理性和最优性。
仿真技术在工程应用特别在高端武器系统总体设计和方案论证中具有极为重要的作用。
对制导问题的研究在国外倍受重视。
在公开发表的文献中,专门讨论制导规律方面的研究论文很多,可见制导规律的研究是非常重要的。
但是仅有理论研究是远远不够的,因为设计的所谓最优制导规律大都是把实际系统进行了大量简化情况下推导出来的,因而与实际情况差别较大。
也就是说理论上是最优的制导规律或参数在实际系统中不一定是最优的。
因此,必须建立接近实际状态的数学模型和仿真软件。
通过仿真计算确定出制导系统的最优参数及制导规律的控制效果,才能最终确定制导规律的最优性。
目前国内外这类问题研究主要存在下列三个问题:其一是模型被简化。
从众多公开发表的文献资料看,大都是把控制系统简化为一阶、二阶、或三阶等根模型来推导制导规律,并据此模型进行仿真计算。
其二是把飞行器的六自由度空间运动状态简化为平面运动状态进行仿真研究,以这种把飞行器运动限制在平面范围内进行仿真计算是有局限性的。
其三是在全弹道数字仿真中仅选取几个特征点参数来代表全弹道的气动力参数,这些参数要表征全弹道动态过程是比较片面的,因而仿真结论的可信度是比较差的。
若把飞行器看成一个刚体,则它在空间的运动,可以看做是质心的移动和绕质心的转动的合成运动。
质心的移动取决于作用在飞行器上的力,绕质心的转动则取决于作用在飞行器上相对于质心的力矩。
MATLAB-SimMechanics机构动态仿真
个方向转动)、Bushing(三个方向移动,三个方
向转动)、Custom Joint(自定义铰)、
Cylindrical(柱面铰)、Gimbal(万向铰,旋转
三个角度)、In-plane(平面内移动)、Planar
(平面铰)、Prismatic(单自由运动铰)、
Revolute(单自由转动铰)、Screw(螺旋铰)、
扑结构,但至少有一个构件是Ground模块,而且
有一个环境设置模块直接与其相连。
一个构件可能不止两个铰(Joint),即可以
产生分支。但是一个较只能连接两个构件。
(3)配置Body模块:双击模块,打开参数对话
框,配置质量属性(质量和惯性矩),然后确定
Body模块和Ground模块与整体坐标系或其他坐标
• 1.双击Disassembled Joints,弹出如图模块组, 其中模块是分解后的铰,不同于Joints中对应的 铰,它们有不同的基准点。
2021/7/1
14
• 2.双击Massless Connectors,弹出如图模块组, 其中模块是Joint中对应的铰的组合。
2021/7/1
15
4.2.6 传Βιβλιοθήκη 器与激励器模块组(Sensors&Actuators)
• 双击模块,弹出图示模块组。该模块组中的模块 用来和普通的Simulink模块进行数据交换。
2021/7/1
16
• Body Actuator:通过广义力或力矩来驱动刚体。 • Body Sensor:刚体检测模块。 • Constraint&Drivr Sensor:检测一对受约束刚体
间的力或力矩。 • Driver Actuator:对一对互相约束的刚体施加相
基于MatlabSimulink的无人机自主着陆过程仿真

收稿日期:2013-09-05修回日期:2013-11-23基金项目:航空科学基金(2011ZA 56001);江西省研究生创新专项基金资助项目(Y C 2011-S 096)作者简介:陈晓飞(1987-),男,江苏宿迁人,硕士研究生。
研究方向:飞行仿真与效能评估研究。
*摘要:为了研究无人机自主着陆过程中高度、速度和飞行轨迹角的变化特性,以提高无人机自主着陆的安全性和精确性,需要对无人机着陆过程进行数学建模。
采用模块化设计思想,根据无人机非线性动力学和运动学方程,在Matlab/Simulink环境下建立了无人机着陆仿真系统及其分系统模型。
通过仿真分析,该模型能够比较真实地描述无人机着陆过程的特性,为更深入地无人机仿真研究打下基础。
关键词:无人机,Matlab/Simulink,自主着陆,仿真中图分类号:V271.4;E926.3文献标识码:A基于Matlab/Simulink的无人机自主着陆过程仿真*陈晓飞,董彦非(南昌航空大学飞行器工程学院,南昌330063)UAVAutonomousLandingSimulationBasedonMatlab/SimulinkCHENXiao-fei,DONGYan-fei(School of Aircraft Engineering ,NanChang HangKong University ,Nanchang 330063,China)Abstract:InordertoimprovethesafetyandaccuracyofUAV(UnmannedAerialVehicle)autonomouslanding,andstudythealtitude,speed,andangleofattackchangesoffeaturesduringUAVautonomouslanding,itisneededtobuildthemathematicalmodelingofUAVlanding.Usingmodulardesignconcept.AccordingtoUAVnonlineardynamicsandkinematicsequations,UAVlandingsimulationsystemanditssubsystemsmodelsinMatlab/Simulinkenvironmentarebuilt.Throughsimulationanalysis,themodelcancomparetherealresponseoftheactualcharacteristicsofUAVlandingandlaythefoundationforfurtherresearch.Keywords:UAV,matlab/simulink,autonomouslanding,simulation引言飞行仿真本质上是通过实验手段进行技术研究[1],通过飞行仿真可以比较真实地模拟飞机的整个飞行过程,并获得其飞行过程中的各种姿态及参数的变化,可以对飞机的飞行过程进行更好的理论研究,降低研究风险,提高效率。
simulink中六边形输入元件

simulink中六边形输入元件六边形输入元件在Simulink中是一种常用的信号输入组件,它可以方便地生成六边形信号,用于模拟现实世界中的某些特定场景。
本文将介绍六边形输入元件的原理和使用方法,并通过实例演示其在Simulink中的应用。
一、六边形输入元件的原理六边形输入元件实质上是通过使用三角波信号和饱和函数来生成六边形波形。
具体来说,它通过设置两个参数来控制六边形波形的周期和幅值。
其中,周期参数决定了六边形波形的周期长度,而幅值参数则决定了六边形波形的振幅大小。
二、六边形输入元件的使用方法在Simulink中使用六边形输入元件非常简单,只需按照以下步骤进行操作即可:1. 打开Simulink软件,并创建一个新的模型文件。
2. 在Simulink库浏览器中找到“Sources”文件夹,并展开该文件夹。
3. 在“Sources”文件夹中找到“六边形输入元件”模块,并将其拖动到模型窗口中。
4. 右键单击“六边形输入元件”模块,选择“参数设置”。
5. 在参数设置对话框中,可以设置六边形波形的周期和幅值。
根据实际需求,可以自行调整这两个参数的值。
6. 设置完毕后,点击“确定”按钮,然后连接六边形输入元件与其他模块,完成信号的传递与处理。
三、六边形输入元件的应用实例为了更好地理解六边形输入元件的应用,下面将通过一个实例来演示其使用方法。
假设我们需要模拟一个机器人沿着一个六边形路径移动的场景。
首先,我们可以使用六边形输入元件生成一个六边形波形信号,来模拟机器人的运动轨迹。
具体操作如下:1. 创建一个新的模型文件,并打开Simulink库浏览器。
2. 在“Sources”文件夹中找到“六边形输入元件”模块,并将其拖动到模型窗口中。
3. 右键单击“六边形输入元件”模块,选择“参数设置”。
4. 设置六边形波形的周期为10秒,幅值为1。
5. 点击“确定”按钮,完成参数设置。
6. 将六边形输入元件与“Scope”模块连接,以便观察生成的六边形波形信号。
simulink数字通信系统仿真与仿真流程图
基于Simulink的通信系统建模与仿真——数字通信系统姓名:XX完成时间:XX年XX月XX日一、实验原理(调制、解调的原理框图及说明)ASK调制数字信号对载波振幅调制称为振幅键控即ASK(Amplitude-Shift Keying)。
ASK有两种实现方法:1.乘法器实现法2.键控法。
乘法器实现法的输入是随机信息序列,经过基带信号形成器,产生波形序列,乘法器用来进行频谱搬移,相乘后的信号通过带通滤波器滤除高频谐波和低频干扰。
键控法是产生ASK信号的另一种方法。
二元制ASK又称为通断控制(OOK)。
最典型的实现方法是用一个电键来控制载波振荡器的输出而获得。
乘法器实现法框图键控法实现框图ASK解调ASK的解调有两种方法:1.包络检波法2.相干解调。
同步解调也称相干解调,信号经过带通滤波器抑制来自信道的带外干扰,乘法器进行频谱反向搬移,以恢复基带信号。
低通滤波器用来抑制相乘器产生的高次谐波干扰。
由于AM信号波形的包络与输入基带信号成正比,故也可以用包络检波的方法恢复原始调制信号。
包络检波器一般由半波或全波整流器和低通滤波器组成。
相干解调框图包络检波框图FSK调制2FSK 信号的产生通常有两种方式:(1)频率选择法;(2)载波调频法。
由于频率选择法产生的2FSK 信号为两个彼此独立的载波振荡器输出信号之和,在二进制码元状态转换(0 →1或1 →0 )时刻,2FSK 信号的相位通常是不连续的,这会不利于已调信号功率谱旁瓣分量的收敛。
载波调频法是在一个直接调频器中产生2FSK 信号,这时的已调信号出自同一个振荡器,信号相位在载频变化时始终时连续的,这将有利于已调信号功率谱旁瓣分量的收敛,使信号功率更集中于信号带宽。
在这里,我们采用的是频率选择法,其调制原理框图如下图所示:FSK解调FSK信号的解调方法很多,我们主要讨论1.非相干解调2.相干解调。
非相干解调框图如下相干解调框图如下PSK调制相移键控是一种用载波相位表示输入信号信息的调制技术。
Simulink建模仿真实例详解
=
e −ζω 0t
⎡ ⎢ x0 ⎣
cos(ωd t )
+
x&0
+ ζω0 x0 ωd
sin(ωd
t
⎤ )⎥
⎦
其中:
ω0 =
k m
系统固有频率
ωd = ω0 1− ζ 2
ζ= c
2 km
阻尼固有频率 相对阻尼系数
m&x&+ cx& + kx = 0 &x&+ c x& + k x = 0
mm
1
x(0) = x0 = 1, x&(0) = x&0 = 0 已知参数:m = 1, c = 1, k = 1
Esti m a te d Po si ti o n
Double click here for
SIMULINK Help
运行菜单选项【Simulation>Start】,则屏幕上出现双质量- 弹簧系统运动状态的动画图形。
模型中的Actural Position模块和Estimated Position模块用来 显示在一个周期内的左边质量块的位置轨迹。
模型可以分为实体模型和数学模型。
实体模型又称物理效应模型,是根据系统之间的相似性而建 立起来的物理模型,如建筑模型等。
数学模型包括原始系统数学模型和仿真系统数学模型。原始 系统数学模型是对系统的原始数学描述。仿真系统数学模型 是一种适合于在计算机上演算的模型,主要是指根据计算机 的运算特点、仿真方式、计算方法、精度要求将原始系统数 学模型转换为计算机程序。
1.4 Simulink 的安装
系统要求: 奔腾100以上CPU,16MB以上内存,Windows 9x或Windows NT
基于MATLAB与SolidWorks的平面六杆机构运动分析及仿真
表3平面六杆机构中预设的部分构件初始参数
3.2平面六杆机构motion运动分析
本部分介绍了利用SolidWorks中的motion插件
进行运动仿真分析以输出平面六杆机构中构件5的
运动图像。首先,利用SolidWorks中的motion功能,将
电机加装在杆*上,设定电机转速恒定为10 r=d・s>#
,X motion 分析中,对构件 5 进行运动分析
终端
发
至
,
回 入库
旧管
系统,
资 的用 ,
本:
Research and Design "0 Fixed Network Terminal Inventory Management
U*#=)-
bang bing
(Chongbo Information Technology Researph Institute Ko・HLtd・,Nanjing Jiangs. 211500)
,
输出平面六杆机构中构件 5 的位移、速度、加速度运
动图像⑷(构件5运动图像如图4所示)。
0.00 0.72 1.44 2.16 2.88 3.60 4.32 5.04 5.76 6.48 7.20
Js
4>1
Ie
>FG
0.00 0.72 1.44 2.16 2.88 3.60 4.32 5.04 5.76 6.48 7.20
Js
4>2滑块I方
-速度
@
50 100 150 200 250 300 350 400
角度JM
图!平面六杆机构构件4的运动图像
' (" " 789:;<FG*H
Simulink机械振动仿真简例分析
1.单自由度无阻尼自由振动
运行仿真,查看示波器显示的结果
曲 线 不 光 滑 ?
1.单自由度无阻尼自由振动
打开仿真参数对话框 Ctrl+E 修改最大步长为0.01
1.单自由度无阻尼自由振动
再次运行,曲线明显光滑了许多
1.单自由度无阻尼自由振动
• 用到的模块:
积分模块,将输入信号经过数值 积分,在输出端输出相应结果。 增益模块,在输入信号基础上乘 以一个特定数据,然后输出。 示波器模块,将输入信号输入到 示波器显示出来。
据此在Simulink中画出框图
5.单自由度有阻尼+正弦激励
• 参数设置: 令k=4,m=1,c=0.2 • 初始状态: 初始速度为0,位移为0.05 • 在框图中: 分别修改对应模块的数值
5.单自由度有阻尼+正弦激励
Hale Waihona Puke • 响应趋于稳态的过程5.单自由度有阻尼+正弦激励
示波器输出为质量块的位移信号
• 参数设置:k=100N/m, m=1kg →n=10rad/s • sin wave参数:Amplitude 1; Frequency 8,10,12 • 初始状态:①x0=1, v0=0→=90; ②x0=0, v0=1→=0; ③ x0=1, v0=10→=45; ④ x0=1, v0=−10→=135; ⑤ x0=0, v0= −1→=180 Sine Wave XY Graph • XY Graph参数 1 1 s s x-min -2; x-max 2; Integrator Integrator1 Gain Scope y-min -2; y-max 2
4.衰减振荡的阻尼比的估计
• 参数:k=100,m=10, c=2 • 初始条件:x0=1, v0=0 • 初始振幅为1,约7个周期时衰减 为0.25,对数减幅: =(ln4)/70.099 阻尼比/20.032 • 理论值=0.5c(km)−0.5 0.032