六自由度舰船运动模拟器随机海浪谱模拟
六自由度平台
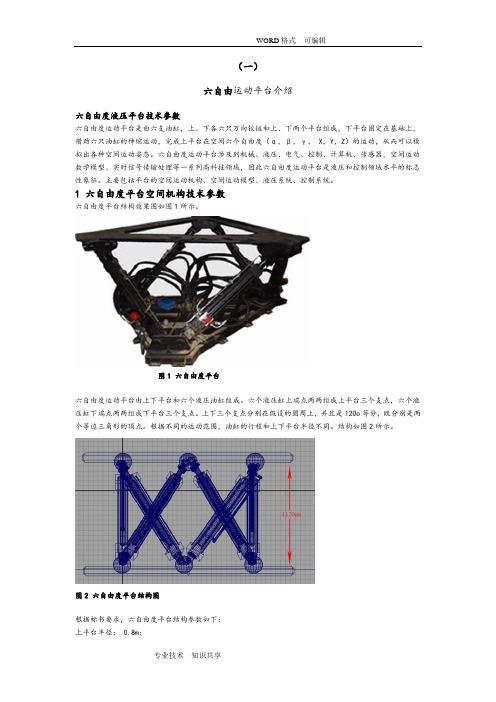
(一)六自由运动平台介绍六自由度液压平台技术参数六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只油缸的伸缩运动,完成上平台在空间六个自由度(α,β,γ, X,Y,Z)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台涉及到机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理等一系列高科技领域,因此六自由度运动平台是液压和控制领域水平的标志性象征。
主要包括平台的空间运动机构、空间运动模型、液压系统、控制系统。
1 六自由度平台空间机构技术参数六自由度平台结构效果图如图1所示。
图1 六自由度平台六自由度运动平台由上下平台和六个液压油缸组成。
六个液压缸上端点两两组成上平台三个支点,六个液压缸下端点两两组成下平台三个支点。
上下三个支点分别在假设的圆周上,并且是120o等分,既分别是两个等边三角形的顶点。
根据不同的运动范围,油缸的行程和上下平台半径不同。
结构如图2所示。
图2 六自由度平台结构图根据标书要求,六自由度平台结构参数如下:上平台半径: 0.8m;下平台半径:0.85m ;油缸最低行程时上下平台垂直距离:约1.17m;油缸行程:±0.20m。
2 六自由度平台空间运动空间运动的目标是实现平台在空间运动的三个姿态角度和三个平动位移,即俯仰、滚转、偏航、上下垂直运动、前后平移和左右平移,及六个姿态的复合运动姿态。
而空间目标是通过六个液压缸的行程实现的,这就需要一个空间的运动模型完成空间运动的转换,假设空间运动的目标俯仰、滚转、偏航、上下垂直位移、前后平移和左右平移用α,β,γ,X,Y,Z表示,六个油缸的行程用L(i)(i=1、2、3、4、5、6)表示。
整个运动模型如下:L(i)=TT(α,β,γ,X,Y,Z)其中,TT是一个空间转换矩阵模型。
由此实时算出每一运动时刻液压油缸的行程。
液压油缸的理论行程再通过D/A接口的转换,给出实际行程值。
六自由度动态模拟环境试验系统
( C h o n g q i n g S O E n v i r o n m e n t I n s t r u m e n t C o . , L t d ,C h o n g q i n g 4 0 1 1 2 2) Ab s t r a c t :S i x d e g r e e o f f r e e d o m d y n a m i c s i m u l a t i o n e n v i r o n m e n t t e s t s y s t e m p r o v i d e s a n i m p o r t a n t
拟 出各种 空间的运动姿态 ,可 以广泛运用 到各种模 拟动
态 的科 技 领 域 中 。
1 . 1 . 2六 A 由度 模 拟 环 境 试 验 台 的 主要 技 术 参 数
1 )运动 系统额定载荷 为 3 0 0 0 K g ;
1系统组成
动 态模拟 环境试 验 系统 由模拟 机械 环境要求 的六 自
前 言
随 着 科 学 技 术 的 不 断进 步 ,社 会 经 济 的 迅 猛 发 展 ,
六 自由度模拟环境试验 台由试 验台主体 、振动谱 复 现 系统 、运 动状态显示系统和实时计算机控制 系统 等几 部分组成 ,如图 2 。六 自由度模 拟试 验台体 由六支油缸 、 上下各六 只万向铰链和上下两个平 台组成 ,下平 台固定 在基础 上 ,借 助六只油缸的伸缩运动 ,完成上下平 台在 定 向六个 自由度 (X , Y , z , , )的运 动 ,从 而可 以模
s i m u l a t i o n t e s t m e t h o d . T hi s m e t h o d m ai n l y u s e d f o r a c c e s s i n g t h e p e r f o r m a n c e r e l i a bi 1 i t y , d r l yi n g s a f e t y a n d s e r vi c e l i f e o f t he v e h i c l e s , v e s s e l a n d o t h e r t r a ns p o r t i n m o v e m e n t
基于谱分析法的船舶结构疲劳强度评估

基于谱分析法的船舶结构疲劳强度评估万松林;曹俊伟;王宇;刘加一【摘要】本文采用基于谱分析法的直接计算法对某船舶结构进行疲劳强度评估.基于三维势流理论与北大西洋海况对该船舶进行水动力分析,得到了满载巡航工况下的波浪压力分布和舱段端面的水平弯矩、垂直弯矩、横向扭矩.同时根据船舶具体结构形式和数值计算的可行性对船体结构进行适当简化,并选用合适类型的单元对船舶结构进行离散,从而得到了船舶三舱段有限元模型.将波浪压力、惯性力、端面弯矩等载荷施加到舱段有限元模型上,得到了典型热应力点的疲劳强度应力值,然后通过谱分析法估算出疲劳寿命.研究结果可为该船舶初步设计阶段的结构优化提供有益参考和借鉴.【期刊名称】《舰船科学技术》【年(卷),期】2018(040)009【总页数】7页(P32-38)【关键词】疲劳强度;谱分析法;三维势流理论【作者】万松林;曹俊伟;王宇;刘加一【作者单位】海军驻436厂军事代表室,上海 201913;中国舰船研究设计中心,湖北武汉 430064;华中科技大学船舶与海洋工程学院,湖北武汉 430074;华中科技大学船舶与海洋工程学院,湖北武汉 430074【正文语种】中文【中图分类】U663.20 引言船舶结构设计结合了多个学科,是一个复杂的综合分析过程,疲劳强度是其中不可或缺的一个环节。
某些船舶在实际应用中,要求能在恶劣的环境条件下长时间进行远洋航行,这就使得船舶在水中承受了更多的交变载荷,也更容易遭到疲劳强度破坏而不是静力破坏。
在交变载荷的作用下,疲劳破坏更容易发生,在远远低于强度极限的时候,疲劳失效就有可能产生在局部高应力的区域[1 – 3]。
目前对于船舶的疲劳寿命,普遍采用的是基于相关规范运用简化算法来进行校核,这种校核方式计算简单,能快速根据经验公式进行疲劳强度的校核,并估算出疲劳寿命[4]。
然而,基于经验公式的简化算法对舰船结构形式,位置带来的应力变化表现并不敏感,故而有时不能有效识别出不同结构形式变化造成的疲劳强度的不同,也不能根据不同海况做出针对性的分析[5 – 7],对后面的舰船结构设计也带来了一些不便。
基于PID算法的船舶动力定位数值模拟研究

基于PID算法的船舶动力定位数值模拟研究李欣;谢芃;骆寒冰;刘鑫;尹汉军【摘要】The ship dynamic positioning technology makes the ship especially engineering ship more flexible position and control on the sea. The ship dynamic positioning technology has developing some kinds of control methods. This article simulated a dynamic positioned ship base on the PID -control method, considers the ocean environment about wind, current and wave loads on the ship and simulated the ship dynamic positioning response. We also can evaluate the ship dynamic positioning capability and reliability, and which sea condition is suit the engineering ship work on the sea by the simulated result.%船舶动力定位技术可以使船舶,尤其是工程船舶更具有机动性,船舶可以机动灵活地进行机动控制和定位。
动力定位发展至今,已经发展了多种定位方法。
本文主要针对较为经典的PID控制算法,对船舶进行动力定位控制的时域模拟,计算风、浪、流影响下船舶的动力定位和运动情况,分析各个推进器的推力输出和角度变化,评估船舶动力定位的能力和动力定位的可靠性。
【期刊名称】《舰船科学技术》【年(卷),期】2014(000)010【总页数】5页(P13-17)【关键词】动力定位;SIMO;PID控制【作者】李欣;谢芃;骆寒冰;刘鑫;尹汉军【作者单位】海洋石油工程股份有限公司,天津300461;天津大学建筑工程学院,天津300072;天津大学建筑工程学院,天津300072;天津大学建筑工程学院,天津300072;海洋石油工程股份有限公司,天津300461【正文语种】中文【中图分类】U6610 引言随着经济发展对能源的使用需求,石油资源成为经济发展的重要因素之一。
救助船模拟器中Stewart摇摆台运动仿真

救助船模拟器中Stewart摇摆台运动仿真张晓磊; 熊伟; 王祖温; 陈伟才【期刊名称】《《液压与气动》》【年(卷),期】2019(000)010【总页数】7页(P50-56)【关键词】Stewart摇摆台; 运动学分析; 虚拟装配; 船舶摇荡; 短峰不规则波【作者】张晓磊; 熊伟; 王祖温; 陈伟才【作者单位】大连海事大学船舶机电装备研究所辽宁大连116026; 北京机械工业自动化研究所有限公司北京100120【正文语种】中文【中图分类】TH137; TP242; U661引言海上事故发生时,常伴有大风大浪等恶劣天气。
作为最有效地救援方式之一,常以出动救助船来实施海上救援[1]。
实际的波浪更接近短峰不规则波,在这种恶劣的天气中,救助船会出现大幅度摇荡运动,横摇角有时甚至超过30°。
为模拟救助船在真实海况中的动态响应,有必要在救助船操纵模拟器中,引入六自由度Stewart 并联运动平台,对救助人员进行海况适应性训练[2-3]。
船舶操纵模拟器主要分为4个等级,即功能完备、多功能、有限功能和单一功能。
功能完备的模拟器,其行为真实感要求具有六自由度运动功能,可通过船舶运动数学模型、视景系统和Stewart平台来实现。
现有船舶模拟器的标准中,没有明确提出对Stewart平台模拟不同海况下船舶运动的相关技术要求[4-5]。
因此,本研究将船舶的运动与Stewart平台相结合,运用理论和仿真的方法实现Stewart平台模拟船舶运动,这为救助船模拟器的研究及相关标准制定,提供一种可靠有效的方法。
在Stewart平台运动仿真方面,为直观的分析机构在不同位姿下各液压缸伸缩量的变化,赵静一等[6]在MATLAB/Simulink中建立基于运动学反解算法的仿真模型,对Stewart平台的6个单自由度的液压缸运动进行仿真,通过仿真曲线可直接观察各液压缸活塞杆伸缩量的变化规律,但仍然是以二维曲线的形式来研究Stewart平台的运动。
水平运动模拟器复演随机海浪谱实验
水平运动模拟器复演随机海浪谱实验薛米安;邢建建;苑晓丽;陈奕超;罗铆钧【摘要】A horizontal movement simulator is designed in this study.The random motion displacements generated by broad band B spectrum and narrow band J spectrum are studied experimentally by using a horizontal movement simulator.Statistical characteristics such as themaximum/minimum displacement and standard deviation of random motion displacement generated by ocean wave spectrum and determinate coefficient between corresponding measured power spectrum density and theoretical spectrum are analyzed by varying significant wave height and peak period.The determinate coefficient between measured power spectrum density and theoretical spectrum of B spectrum is greater than that of J spectrum,which is mainly affected by peak period for J spectrum.The standard deviation of the random motion displacement and the variance of power spectrum density of J spectrum are also found to be greater than that of B spectrum. The result indicates that it is difficult to generate random motion displacement exactly by a horizontal movement simulator for more highly dispersed J spectrum compared with broad band Bretschneider spectrum.%设计了一种水平随机运动模拟器,并基于模型实验研究了该水平运动模拟器复演宽频带Bretschneider谱(B谱)与窄频带JONSWAP谱(J 谱)所生成随机运动位移的能力及其关键影响因素.通过改变谱峰周期和有效波高讨论了两种海浪谱所生成水平随机运动位移的极值及与随机运动位移相应的频谱密度特征,确定了谱峰周期及有效波高对水平运动模拟器冲程的影响规律.基于实测频谱密度与理论谱之间的拟合优度,发现该模拟器对宽频带的B谱具有较高的复演精度,而对能量分布相对集中的窄频带J谱的复演精度相对较低,并且发现谱峰周期是影响J谱实测谱与理论谱拟合优度的主要因素,同时由J谱生成的随机运动位移的标准差及相应频域中能谱密度的方差均大于B谱,表明J谱相对B谱而言是一种高离散度的谱型,在运动模拟器中很难被精确复演为随机运动位移.【期刊名称】《振动、测试与诊断》【年(卷),期】2019(039)002【总页数】8页(P346-352,446)【关键词】运动模拟器;宽频带谱;窄频带谱;统计特征;快速傅里叶变换【作者】薛米安;邢建建;苑晓丽;陈奕超;罗铆钧【作者单位】河海大学海岸灾害及防护教育部重点实验室, 南京, 210098;河海大学港口海岸与近海工程学院, 南京, 210098;河海大学港口海岸与近海工程学院, 南京, 210098;河海大学理学院, 南京, 210098;河海大学港口海岸与近海工程学院, 南京, 210098;河海大学港口海岸与近海工程学院, 南京, 210098【正文语种】中文【中图分类】TH115;TB534+.2引言海洋工程结构物如浮式生产储卸油系统(floating production storage and offloading,简称FPSO)、半潜式平台、大型液货船等主力海洋工程装备,长期遭受着风浪流等复杂动载荷的作用,尤其是在波浪作用下常常会引起上述结构物的剧烈运动。
基于海浪谱的海浪数值模拟及其仿真验证
们对 海浪 随机过 程 的认 识 不断深人 及计 算机模 拟 技术 的飞速 发展 , 用计 算 机 进行 软模 拟 已越 来 利 越多 地成 为科研 人员 研究 海浪及 海浪对 船舶及 相
测 资料符 合程度 优 于 J NS O WAP 谱 , 不仅 能适 用
于深 浅水 , 而且 能适用 于 风浪 发展 的不 同时期 , 其 公式 为 :
.
向分布 的物理 量 , 它在 海 浪 的理 论 研究 和 实 际 应
用中均 不失 为一 种 有 效 手段 , 因而 已成 为 目前 海
( _ 巧 ≤≤ 1 1 1 }0, ’ ) 1
s ( 002 .84 (. 2 .4P+0022 15 —025 2 . 9P ) 0 厂>10 .5
3 子波来 合成 海浪 , 0个 用频 谱方 式表 示如 下 :
维普资讯
第5 期
蔡
烽等
基 于海浪谱 的海 浪数值模 拟及 其仿 真验证
4 1 根据 海浪 时历计算 海 浪谱 [ . 3 ]
.
2 . 3
() _ /S ) ∞ ( +r +e t =5 2 ( s 2 ̄ o f t )
() 2
浪研 究 的 中 心 问 题 。笔 者 对 I T 单 参 数 谱 、 T C ITC双参 数谱 、 T 波一 莫 谱 、 洋 局谱 、 海 谱[ 海 南 、 J NS O WAP谱 、 氏谱 等 国 内外 常见 谱 进 行 了模 文 拟仿真 研 究 , 于篇 幅 只 以 J HNS P谱 和 文 限 O WA 氏谱 为例加 以介 绍 。 1 1 J NS P谱 【 . O WA 2 ] J ONS P谱 是海洋 工程 中运 用最 广泛 的海 WA 浪谱之 一 , 平均 波能谱 公式 为 : 其 s ):0 6 8 ( -5 .
舰船过驳6自由度波浪补偿机器人仿真研究
舰船过驳 6 自由度波浪补偿机器人仿真研究
温兆麟, 陈爱国
( 广州航海高等专科学校 船舶工程学院 , 广东 广州 510725 ) 摘要: 提出一种对舰船过驳进行 6 自由度波浪补偿的机器人 , 对该机器人进行了运动学建模 、 优化设计, 并进行了仿 真。研究结果表明: 该优化的补偿机器人可以实现舰船过驳 6 自由度的波浪补偿, 为舰船过驳波浪运动实现 6 个自 由度的完全补偿提供了可能 。 关 键 词:舰船; 过驳; 波浪运动; 6 自由度 中图分类号:TH701 文献标志码:A 文章编号:1674-0696 ( 2012 ) 05-1091-04
第 31 卷
( 1)
支链在静坐标系中的矢量 L i 为: x O + a11 X Bi + a12 Y Bi - x Ai Li = y O + a21 X Bi + a22 Y Bi - y Ai z O + a31 X Bi + a32 Y Bi
( 2)
2 L i 2 = ( x O + a11 X Bi + a12 Y Bi - x Ai ) + ( y O + a21 X Bi + a22 Y Bi - y Ai ) 2 + ( z O + a31 X Bi + a32 Y Bi ) 2 = 2 2 m2 ( 3) i1 + m i2 + m i3 T x O y O z O] 是动坐标系原点 O 在静坐标系 式中: t = [ 中的矢量表示。 m i1 = ( x O + a11 X Bi + a12 Y Bi - x Ai ) m i2 = ( y O + a21 X Bi + a22 Y Bi - y Ai ) m i3 = ( z O + a31 X Bi + a32 Y Bi ) ( 4) 6 自由度并联机器人的运动学关系为 :
基于SIMULINK的舰船六自由度运动仿真
摘要:刚体 六 自由度运动仿真是飞机 、火箭 、导弹及舰船等载体运动仿真 的基础 , 能较好 的反映 出刚体 的运动 本质。针对刚体六 自由度运动 ,介绍了三大常用坐标 系定义 ,在此基础 上建 立了舰船 六 自由度运动方程 ,利 用 MA T L A B / S I MU L I N K 的A e r o s p a c e T具箱建 立了一般 刚体 的六 自由度仿真模 型并进行了两组对比仿真实验 ,实 验结果表明轴向高速旋转有助于保持舰 船法向和横 向的稳定性 。 关键词 :刚体 ;六自由度 ; MA T L A B ;S I MU L I N K 中图分类号 :T P 3 9 1 . 9 文献标识码 :A
( 1 . 9 1 3 8 8 T r o o p s o f P L A Z h a n j i a n g 5 2 4 0 2 2 ;
2 . N a v a l U n i v e r s i t y o f E n g i n e e r i n g W u h a n 4 3 0 0 3 3 C h i n a ) Ab s t r a c t :T h e r i id g b o d y s i x — d e g r e e s — o f - f r e e d o m s i mu l a i t o n i s t h e b a s i s o f t h e mo v e me n t s i mu l a i t o n f o r m i s s i l e 、
动态海面上方船舶六自由度运动仿真
动态海面上方船舶六自由度运动仿真陈万紫;张培珍;黄健儿;区丽连【摘要】在Fudide-Krylov假设条件下,依据船舶分离建模理论在固定和运动坐标系中计算海面船只六自由度运动数学模型。
主要包括:对风、浪、流的单独建模并进行矢量叠加,并在风浪流联合作用下对船舶六自由度运动构建简化的数学建模,完成实时仿真。
基于Simulink和V-Realm Builder虚拟现实技术创建船舶运动模型、海洋表面环境及船只的几何模型,对船舶六自由度运动进行视景仿真,给出了有风无浪、有浪无风和风浪兼有三种情况下船只旋回路径和船舶运动轨迹。
在VR视景浏览器中创建动态海面上船舶六自由度运动模型,不仅易于实现且结果逼真。
得到的结果为进一步研究动态船只目标声散射特性的精确预报提供基础。
【期刊名称】《海洋技术学报》【年(卷),期】2019(038)001【总页数】6页(P40-45)【关键词】傅汝得-克雷洛夫假设;六自由度;VR与Simulink;视景仿真【作者】陈万紫;张培珍;黄健儿;区丽连【作者单位】[1]广东海洋大学电子与信息工程学院,广东湛江524088;[1]广东海洋大学电子与信息工程学院,广东湛江524088;[1]广东海洋大学电子与信息工程学院,广东湛江524088;[1]广东海洋大学电子与信息工程学院,广东湛江524088;【正文语种】中文【中图分类】P733.24在船舶六自由度运动数学模型方面,近年来国内外已取得一定的研究成果,综述船舶载荷和运动研究在船舶设计和运行研究中的重要意义。
由于船舶六自由度运动方程比较复杂,若利用传统的程序设计语言编制仿真软件,计算量较大且不易调试,不具备可移植性。
近年来,许多国内外专家和学者在船舶六自由运动仿真的发展和研究中做出了很大的贡献。
徐静[1]等基于船舶六自由度操纵运动开展了一系列的试验和数值模拟研究。
考虑三自由度船舶平面运动与横摇、纵摇、垂荡运动的耦合,建立了波浪中船舶六自由度操纵耐波全运动模态的数学模型;TahsinTezdogan[2]使用非定常Reynolds-Averaged Navier-Stokes求解器,进行了浅水船舶运动的数值研究。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
六自由度舰船运动模拟器随机海浪谱模拟皮阳军1, 王宣银1, 罗晓晔2, 顾 曦1(1浙江大学流体传动及控制国家重点实验室 杭州,310027)(2杭州职业技术学院模具研究所 杭州,310018)摘要 为了测试随机海浪引起的振动对舰载设备性能和可靠性的影响,提出利用六自由度舰船运动模拟器复现随机海浪谱,对舰载设备进行环境模拟试验。
针对六自由度舰船运动模拟器的实际情况,提出双闭环控制方法,利用实时正解代替输出传感器。
研究了基于谱均衡和时域随机化的随机海浪谱驱动信号生成技术,并在六自由度舰船运动模拟器上进行试验。
试验结果表明,该方法能在六自由度舰船运动模拟器上模拟随机海浪谱,频域复现精度达到±1dB。
关键词 六自由度 模拟器 海浪谱 可靠性 随机振动中图分类号 T P242 T P391.76引 言环境模拟试验是设备可靠性验证的重要组成部分,在设备的研发和可靠性验证中具有重要作用[1-2]。
舰船在海洋中主要受到海浪扰动而产生振动,需要舰船运动模拟器来模拟海浪产生的振动。
海浪引发的振动属于随机振动,而海浪功率谱密度是海浪重要统计特征之一[3]。
因此,海浪随机振动的模拟又称为海浪功率谱密度的模拟。
国外公司已经掌握了随机振动试验的控制技术,有较为成熟的产品[4-5]。
Welar atna[6]介绍了随机振动试验的控制算法。
Vaes[7]介绍了一种路面振动模拟的振动台。
国内学者主要对随机振动试验中的理论进行了研究。
蒋瑜等[8]对超高斯真随机信号的生成技术进行了研究。
王述成等[9]对随机振动试验中的时域随机化技术进行了研究。
这些研究主要集中在宽带随机振动控制,振动台的行程一般较短。
研究表明,海浪谱为窄带信号,频谱主要集中在低频段,在时域内随机信号的幅值较大,因此不能采用一般的振动台进行模拟。
六自由度舰船运动模拟器具有输出力大、输出位移长的优点,满足海浪谱模拟的要求。
国内外学者对并联六自由度平台进行了较为深入的研究,基于该平台的六自由度模拟器已经在航空、汽车和舰船模拟上得到了广泛的应用[10]。
本文根据六自由度模拟器的实际情况,利用位移传感器采集6个驱动杆长度,进行实时正解得到模拟器末端位姿。
这种设计避免了安装加速度传感器,也方便在计算机内部进行位置闭环控制。
1 六自由度舰船运动模拟器六自由度舰船运动模拟器主要由并联六自由度平台构成。
如图1所示,并联六自由度平台由6根可伸缩液压缸分别和上、下平台以球铰和虎克铰连接。
下平台固定,上平台可以模拟舰船的纵移、横移、垂荡、纵摇、横摇和艏摇六自由度运动。
平台上、下铰点分别用B i,A i(i=1,2,…,6)表示。
上、下平台的坐标系分别为运动坐标系O p X p Y p Z p和惯性坐标系O g X g Y g Z g。
平台的结构参数如下:上、下铰分布半径为R1和R0;上、下铰点分布角为 1和 0;支链铰间距为q;零位时上平台高为h。
六自由度平台的输出与6个驱动关节的输入具有特定的映射关系。
已知各个关节输入求取六自由度平台的输出称为正解问题。
因此,试验系统采集6个驱动关节的位移,通过实时正解求出六自由度平台的输出位置,避免直接在输出端安装传感器。
2 随机海浪谱驱动信号生成原理传统的舰船运动模拟器一般将海浪作为规则波或规则波的叠加进行处理,实际上海浪是不规则的 第30卷第4期2010年8月振动、测试与诊断Journal of Vibratio n,M easurement&DiagnosisV o l.30No.4A ug.2010国家自然科学基金资助项目(编号:50375139);新世纪优秀人才支持计划资助项目(编号:N CET-04-0545);浙江大学流体传动及控制国家重点实验室开放基金资助项目(编号:GZK F-2007004)收稿日期:2009-06-16;修改稿收到日期:2010-03-12图1 并联六自由度平台坐标与结构参数示意图随机波。
海浪谱作为随机海浪的一个重要统计特征,表征了海浪的能量分布等环境信息。
由于海浪的生成原理的复杂性,目前得到的海浪谱模型也仅仅是半经验半理论的。
皮尔逊-莫斯柯维奇谱简称P-M 谱,是Pierson 和M oscow itz 在对北大西洋的海洋观察资料进行谱分析,进行无因次化与数学拟合处理得到的[11]。
P -M 谱如下式所示S ( )=8.1×10-3g 25ex p -0.74g v 4(1)其中:v 为海面上19.5m 高度处的平均风速;g 为重力加速度。
可以看出,P -M 谱仅由风速决定,能较好地代表实际的随机海浪谱,它在海洋工程和船舶工程中得到了广泛应用。
随机振动试验控制框图如图2所示。
该控制框图2 随机振动试验控制框图图由两个控制闭环组成,外环是频域谱再现控制环,其作用是通过谱估计和谱均衡得到实际的驱动谱,并且转换为时域的驱动信号;虚线内是时域位置环,其作用是使模拟器末端位置跟踪外环得到时域驱动信号。
内环控制采用传统的电液位置伺服控制方法。
外环控制的基本流程是:六自由度舰船运动模拟器的6根驱动杆的长度通过电液缸的位移传感器获得,通过并联六自由度平台的位置,正解得到模拟器输出端的位姿,对该位姿进行快速傅里叶变换谱估计,得到其功率谱密度函数。
将该功率谱密度函数和预先设定的海浪谱进行比较均衡,得到驱动谱。
由于驱动谱不含相位信息,不能直接进行快速傅里叶反变换,因此将驱动谱与一组随机化相位组合进行快速傅里叶变换,得到伪随机时域驱动信号。
对该信号进行时域随机化转变为随机信号输出给时域控制器。
3 模拟器输出功率谱均衡原理当控制系统给出一个激励信号,在模拟器输出端会产生一个响应信号,其响应取决于舰船运动模拟器的动态性能。
其输入输出的关系为S y ( )=H ( )S x ( )(2)其中:H ( )为模拟器的传输比。
由于六自由度舰船运动模拟器是一个强耦合的非线性系统,其传输比很难直接得到,因此采用多次均衡的办法得到驱动谱。
第1次均衡得到的驱动谱为S 1x( )=(S r ( ))2S 0y ( )(3) 第n 次均衡得到的驱动谱为S nx( )=S r ( )S (n -1)x ( )S(n -1)y ( )(4)其中:S r ( )为参考海浪谱;S(n -1)y ( )为第n -1次对输出谱的估计。
这样经过反复均衡,可以使模拟器输出的海浪谱在一定精度下逼近参考海浪谱。
4 海浪谱的时域随机化由于功率谱不包含相位信息,因此功率谱均衡后还要经过随机相位调制,然后再进行快速傅里叶逆变换,得到满足功率谱要求的时域信号。
根据傅里叶逆变换的原理可知,一次傅里叶逆变换得到的单帧信号在时域内是有限的,直接将连续两帧信号用于驱动模拟器无法保证信号的光滑过渡。
解决该问题一般有两种方法,一是采用卷积的方法得到连续信号,这种方法不需要加窗处理,不存在频域泄漏,但是计算量大;另一种是采取基于加窗重叠的时域随机化处理方法,其基本过程如图3所示[9,12-13]。
对当前帧的时域驱动信号x 3(n )进行加窗处理得到x ′3(n ),将x ′3(n )的前半周期信号与存储器中的前一帧加窗处理信号x ′2(n )的后半周期进行重叠相加,得到半帧激励信号y ′21,将x ′3(n )的后半周期信号存入存储器中与下一帧加窗处理信号x ′4(n )的前376振 动、测 试 与 诊 断第30卷 半周期进行重叠相加,得到另外半帧的激励信号y ′22,y ′21与y ′22构成了一帧完整的激励信号y 2(n )。
图3 时域随机化原理加窗的方法如下x ′(n )=∑Nn =1x (n )w (n )(5)其中:w (n )为窗函数,一般可根据需要选择半正弦窗、三角窗和汉宁窗等。
由于半正弦窗函数主瓣窄,且加窗后时域信号不会产生周期性波动,因此本文采用半正弦窗作为时域随机化的窗函数。
需要指出的是,由于时域加窗的原因,在频域内不可避免的会造成泄漏。
经过时域随机化处理后,就得到了满足海浪谱要求的连续的时域随机驱动信号。
5 试验验证为了验证前述方法的有效性,在六自由度舰船运动模拟器上进行了随机海浪谱模拟试验。
试验使用舰船运动模拟器,系统的组成如图4所示。
PC 控制器完成所有控制算法,DA 模块采用研华PCL-726,AD 模块采用研华PCL-812,伺服阀采用M oog J661-306。
六自由度舰船运动模拟器的结构参数和惯性参数如表1和表2所示。
在动平台上铰接的被测设备为稳定跟踪平台,该设备自重为800kg 。
表1 舰船运动模拟器结构参数R 0/mm R 1/mm 0/(°) 1/(°)h /mm 1000.0800.016161280表2 舰船运动模拟器惯性参数m p /kg I x /(kg ・m 2)I y /(kg ・m 2)I z /(kg ・m 2)550.378.5108.25185.26 根据海浪P-M 谱模型,假定海面高19.5m 的风图4 试验系统组成框图速为4m /s,得到的海浪谱如图5所示。
可见海浪功率谱能量主要分布在低频0.2~1.5Hz 之间。
考虑到六自由度舰船运动模拟器时域控制回路时间为0.002s ,采样频率为500Hz ,谱线数为214,单次均衡时间为32.768s 。
经过时域随机化后的一段时域激励信号如图6所示。
图7为最后的试验结果,可以看出,在海浪谱能量的主要分布区域,试验结果较为理想,功率谱密度误差控制在±1dB 范围内,实现了海浪谱的复现。
图5 随机海浪功率谱密度函数图6 时域激励信号6 结 论对六自由度舰船运动模拟器复现随机海浪谱进行了研究。
针对六自由度舰船运动模拟器的特点,提出双闭环控制方法,频域环经过反复均衡保证输出377 第4期皮阳军,等:六自由度舰船运动模拟器随机海浪谱模拟图7 随机海浪谱复现结果谱逼近海浪谱,时域环保证模拟器输出跟踪时域激励信号。
通过位置正解得到输出端位置,避免安装加速度传感器。
应用该方法进行了海浪谱模拟试验,结果表明,六自由度舰船运动模拟器能有效模拟随机海浪谱,为测试舰载设备在随机海浪环境中的性能提供了一种方法。
参 考 文 献[1] 胡志强,法庆衍,洪宝林.随机振动试验应用技术[M].北京:中国计量出版社,1996.[2] 王小亮,李立,张卫华.高速列车垂向振动的模拟器再现方法研究[J].振动、测试与诊断,2009,29(1):1-4.[3] 王科俊,姚绪梁,金鸿章.海洋运动体控制原理[M].哈尔滨:哈尔滨工程大学出版社,2007.[4] Go mes H M,Gasparet o D D S,F err eir a F D S.Asimple clo sed-loo p activ e co nt ro l of electr odynamicshaker s by acceler atio n po w er spect ral densit y fo r en-viro nmental v ibration tests[J].Ex per imental M e-chanics,2008,48(5):683-692.[5] L agatt olla W.T he nex t gener atio n o f env ir onmentaltesting[J].Ev aluat ion Eng ineering,2005,44(1):44-47.[6] W ela ratna S.A new alg or ithm fo r random vibrationco nt ro l[J].Evaluatio n Eng ineering,1994,33(12):51-55.[7] Vaes D,So uver ijns W,Cuy per J D,et a l.O ptimaldecoupling fo r impro ved multiv ariable co ntro ller de-sig n,applied o n an automo tiv e v ibra tio n test rig[C]∥P ro ceeding s of t he Am erican Co nt ro l Co nfer ence.U SA,Denver:IEEE P ress,2003:785-790.[8] 蒋瑜,陈循,陶俊勇.基于时域随机化的超高斯真随机驱动信号生成技术研究[J].振动工程学报,2005,18(4):491-494.[9] 王述成,陈章位.随机振动试验中时域随机化技术的研究[J].机械工程学报,2005,41(5):230-233. [10]方跃法,黄真,孔令富.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.[11]陈虹丽,李爱军,贾红宇.海浪信号的实时仿真和谱估计[J].电机与控制学报,2007,11(1):93-96. [12]于慧君,陈章位,王庆丰.一种加窗重叠信号平滑连接方法及其在振动信号预处理中的应用[J].振动与冲击,2007,26(8):39-40.[13]Hanna P,D esainte-Cather ine M.A dapting the o ver la-padd metho d to the sy nt hesis of noise[C]∥Pr oceed-ing s of the5t h I nt ernational Co nfer ence o n Dig italA udio Effects.Ger many,Hambur g:Jo hn Wiley&So ns,2002:101-104.第一作者简介:皮阳军 男,1981年10月生,博士研究生。