无轴承永磁电机及其控制
合集下载
无轴承永磁同步电机研究现状与发展趋势
Z ej n 10 3 hn ) hni g2 2 1 ,C ia a
Abtat er ges e ae t ge sn ho osm t P M) i ahg ef mac MS s c:A bai l r n n man t yc rnu oo r n s pm r( MS s ihpr r n eP M o
微 电机
无 轴 承 永 磁 同步 电机 研 究 现 状 与 发 展 趋 势
成秋 良,朱烷秋 ,王成 波 ,王海涛
( 江苏大学 电气信息工程学院 ,镇江 2 2 1 ) 10 3
摘
要 :无轴承永磁 同步电机同时具备永磁 同步电机的优 良特性与磁悬浮轴承 的特点。分析 了国内外
无轴承永磁 同步 电机研 究现状 ,指 出其发展规律 ;总结 了目前 国内外无轴承永磁 同步 电机结构与控制 策略方面的研 究成果 ,为其结构改进 与控制优化提供 参考 ;分析 了无轴承永磁 同步电机发展趋势 ,为
a o tn e rn l s e h oo y, a a h x eln h r c e sis o MS a d t e fau e fma - d p i g b a ge stc n l g i nd h st e e c le tc a a tr tc fP M n h e tr s o g i n tc b a n . Ba e n t e meh d o o u n ttsis, a ay e n e n t n la d do si e e r h ei e r g i s d o h t o fd c me tsaitc n lz d it r ai a n me tc r s a c o
对 I E /E lc o i Lba ( E ) 据 库 , E E IE Eet nc i r I L 数 r ry 20 ( 括 20 0 7年 包 0 7年 ) 之前 的检索结 果进 行 了统计
五自由度无轴承永磁同步电机非线性动态解耦控制

摘 要: 针 对 五 自由度无 轴 承永 磁 同步 电机这 一强耦 合 性系 统 , 提 出一种 最d " - -乘 支持 向量机 ( L s —
S V M) O L 阶逆模 型构建及其解耦控制方法 。在给 出了三 自由度交直流磁轴承悬浮力方程和径 向两 自由度无轴 承永磁 同步电机转矩力 、 径 向力方程基础上 , 建立 了电机的五 自由度状态方程 。在分析系统可逆的情况下 , 将 L S — S V M 的非线性逼 近能力与逆系统方法的解耦线性化相结合 , 对五 自由度无轴承 永磁同步 电机进行解耦 控 制。仿 真结果 表明 , 使用该控制方法能使 系统稳定运行 , 并且能 够实现五 自由度无轴 承永磁 同步电机各 自由 度之 间的解耦 控制 , 且具有 良好 的动静态性 能。 关键词 : 五 自由度 ; 无轴承 ;永磁 同步 电机 ; y s t e m me t h o d w a s p r o p o s e d b y a n a l y z i n g t h e 5 d e g r e e — o f - f r e e d o m( D O F)b e a r i n g l e s s p e r m a n e n t ma g n e t i c
A b s t r a c t : A d e c o u p l i n g c o n t r o l m e t h o d b a s e d o n t h e l e a s t s q u a r e s s u p p o r t v e c t o r m a c h i n e ( L S — S V M) — t h o r d e r
电 札 再控 制 应 闭 2 0 1 3 . 4 0( 3 )
控制与应用技术 E M C A
S V M) O L 阶逆模 型构建及其解耦控制方法 。在给 出了三 自由度交直流磁轴承悬浮力方程和径 向两 自由度无轴 承永磁 同步电机转矩力 、 径 向力方程基础上 , 建立 了电机的五 自由度状态方程 。在分析系统可逆的情况下 , 将 L S — S V M 的非线性逼 近能力与逆系统方法的解耦线性化相结合 , 对五 自由度无轴承 永磁同步 电机进行解耦 控 制。仿 真结果 表明 , 使用该控制方法能使 系统稳定运行 , 并且能 够实现五 自由度无轴 承永磁 同步电机各 自由 度之 间的解耦 控制 , 且具有 良好 的动静态性 能。 关键词 : 五 自由度 ; 无轴承 ;永磁 同步 电机 ; y s t e m me t h o d w a s p r o p o s e d b y a n a l y z i n g t h e 5 d e g r e e — o f - f r e e d o m( D O F)b e a r i n g l e s s p e r m a n e n t ma g n e t i c
A b s t r a c t : A d e c o u p l i n g c o n t r o l m e t h o d b a s e d o n t h e l e a s t s q u a r e s s u p p o r t v e c t o r m a c h i n e ( L S — S V M) — t h o r d e r
电 札 再控 制 应 闭 2 0 1 3 . 4 0( 3 )
控制与应用技术 E M C A
永磁型无轴承电机悬浮系统的PID-PD控制

悬浮绕组 电流的关系可 以写为 :
r r
控制 目标。
= —— 一 i l s = , —— 一 20/ l I g、£ 2 I l  ̄o tm2 gV l m L
。 1 ) (
式 中 : , 为水 平和 垂直 方 向的可控 悬浮 力 ( 应于 位 移 对
t l r i d sg e . e ie ,h e ain h p o h s s h me a d t e ca s I c n rle n b ai g e s s se i n — r l s e in d B sd s t e r l t s i ft i c e n h ls i P D o tolr i e r l s y t m s a a oe o c n lz d, n ti i d c td t a h o t lsr tg n i n d c u d b s d fr t e a p o i t n a d p e it n o o — y e a d i s n ia e h tt e c nr t e y me t e o l e u e h p r xmai n r d c i fc n o a o o o o
(. 1浙江大 学 , 电气工程 学 院 ,浙江 杭 州
敏 ,程 帅
301 ) 10 3
30 2 ;2浙江 科技 学 院, 10 7 . 电气学 院 ,浙江 杭 州
摘 要 : I 制器被 广泛 应用 于控制 各种稳 定 的系统 , PD控 其参数 可采 用 Zel i os的方法 进行 确定 , ig rNc l e h 但对 于不 稳 定系 统采用 PD控 制 , I 一般 需进 行大量 的调试 工作 。此 处采用 双环 PD控制 , I 先将 系统 内环 转化 为稳 定的控 制 模型 , 通过 外环 控 制器 改善 系统 性 能 , 对 永 磁 型无 轴承 电机 ( MB 的 数学 模 型 , 再 针 P M) 设计 了 PD.D控 制 I P 器 。此 处给 出 了无 轴承 系统 PD.D控制 与传 统 PD控制 间的关 系 , I P I 即该 方法可 用于 永磁无轴 承 电机调试 现场 中 PD参 数 的预估 . 真和 实验证 明 了该 方法 的可行 性 。 I 仿
无轴承永磁同步电动机永磁体参数优化设计
ABSTRACT: I h s p pe , t e prn i e o a ils s e so o c sp o ucin f rb a i ge spe a n ti a r h i cpl fr d a u p n in f r e r d to o e rn ls r — m
维普资讯 无轴 承永磁 源自步 电动机永磁体参数优化设计朱幌秋
范海燕
李
烽
中图分类号 :T 3 1 T 3 1 M 4 M 5
文献标识码 :A
文章编号 :10 -8 8 2 0 )90 3 -4 0 1 4 (0 7 0 -0 70 6
无轴 承 永磁 同步 电动 机 永磁 体 参 数 优 化 设计
t gf i l n eh d( E .T es d eut poierf e c au rotii xm lr i n ee met to F M) h t yrsl rv ee nevlef ban gmai a a nit e m u s d r o n —
d a u p n i n f r e n p i zn n e in n MS . ils s e so o c sa d o tmii g a d d sg i g BP M KEY ORDS: Be rn l s PMS ; Ra ils s e so o c W ai ge s; M d a u p n i n fr e;FEM ; Op i z to e in tmiai n d sg
t i c i e c mp rn t t e tra , a ai n e—y e ma n t n s ra e a e u e rd sg ig h sma h n o a g wi o h rma e l nd s l c tp g e so u f c r s d f e i nn i h i e o a d fxn n i g. Th a ai n r lto e we n r d a o c s t e t ikn s fp r a e tma n ta u r n s i e v r to e ai n b t e a i f r e , h h c e so e i l m n n g e nd c re t i a ilf r e wi d n s i lo su id i h h oy. T n t e r da us e so o c s o n r da o c n i g sa s t d e n t e t e r he h a ils p n i n f r e f BPMS us d M e i r cie a e a c u t d a d a ay e o sd rn g e i ic ts t ai n a d n n i a t y a o — n p a tc r c o n e n n l z d c n i e g ma n t c rui aur t n o l i c o ne r y b d p i
维普资讯 无轴 承永磁 源自步 电动机永磁体参数优化设计朱幌秋
范海燕
李
烽
中图分类号 :T 3 1 T 3 1 M 4 M 5
文献标识码 :A
文章编号 :10 -8 8 2 0 )90 3 -4 0 1 4 (0 7 0 -0 70 6
无轴 承 永磁 同步 电动 机 永磁 体 参 数 优 化 设计
t gf i l n eh d( E .T es d eut poierf e c au rotii xm lr i n ee met to F M) h t yrsl rv ee nevlef ban gmai a a nit e m u s d r o n —
d a u p n i n f r e n p i zn n e in n MS . ils s e so o c sa d o tmii g a d d sg i g BP M KEY ORDS: Be rn l s PMS ; Ra ils s e so o c W ai ge s; M d a u p n i n fr e;FEM ; Op i z to e in tmiai n d sg
t i c i e c mp rn t t e tra , a ai n e—y e ma n t n s ra e a e u e rd sg ig h sma h n o a g wi o h rma e l nd s l c tp g e so u f c r s d f e i nn i h i e o a d fxn n i g. Th a ai n r lto e we n r d a o c s t e t ikn s fp r a e tma n ta u r n s i e v r to e ai n b t e a i f r e , h h c e so e i l m n n g e nd c re t i a ilf r e wi d n s i lo su id i h h oy. T n t e r da us e so o c s o n r da o c n i g sa s t d e n t e t e r he h a ils p n i n f r e f BPMS us d M e i r cie a e a c u t d a d a ay e o sd rn g e i ic ts t ai n a d n n i a t y a o — n p a tc r c o n e n n l z d c n i e g ma n t c rui aur t n o l i c o ne r y b d p i
基于DSP无轴承永磁同步电机控制系统设计

3 .南 京 西 门子 有 限公 司 , 苏 南 京 江
摘要 : 了控 制 无轴承 永磁 同步 电机的旋 转和 转子 的 稳 定 悬浮 , 为 设计 出 了以 T 3 0 F 4 7 为微 处理 Ms 2 L 2 O A 器核 心的无 轴承 永磁 同步 电机控 制 系统 , 充分利 用 T 3 0 F4 7 的 中断 系统设计 出能 同时控 制 电机 MS 2 L1 0 A 2
无轴 承永磁 同步 电机 的控 制必须 同时实 现转矩 控 制 和径 向力控 制 , 且还 是一个 强实 时控制 系统 , 并 控制 软件不仅 要保 证执 行 过程 和 结 果 的正 确 , 同时 还必 须 保 证在 数字控 制 系统允许 的 时间范 围 内完 成控制 量 的
是通 过控 制气 隙磁场 产 生 的 , 电机 带有 负 载 时转 矩 当 绕组 中 电流 L不 为 0 径 向力绕 组 电流 与径 向力之 间 ,
t l l t mant ru ,h t oio nl i ce kdb E n A 6N . t attecmm n r e r g e ct q e temo rp si ag s h c e yQ P ad C P I T A s h o ad oe co i o o tn e l ,・ Nhomakorabea4 8・
《 测控技 术} 0 0年 第 2 第 9期 21 9卷
基 于 D P无轴 承 永 磁 同 步 电机控 制 系统设 计 S
张
( .南京信息职业技 术学 院 , 1 江苏 南 京
磊 ,李 同华
201 106;
2 04 ) 10 6
2 04 ; .南京航空航天大学 自动化学院 , 106 2 江苏 南京
存在 一个 由电机负 载引 起 的 电角 度 , 时 的数 字 控制 此 系统构成 如 图 1所示 。 图中 , 为无 轴承永磁 同步 电动机 角速 度 的命令 值( 单位 为 rd , 子实 际 的角 速度 由光 电编 码 器检 a)转
无轴承永磁同步电机数字控制系统的设计

第4 4卷 第 5期 2 1 年 5月 00
电 力 电 子 技 术
Po rElcr nis we e to c
Vo .4,N . 1 4 o5 Ma , 01 y2 0
无轴承永磁 同步电机数字控制系统的设计
张 磊 1,俞 , 2 跃 , 同华 。 李
201) 10 6 (. 京 信息 职 业 技术 学 院 , 苏 南 京 1 南 江 2 04 ; . 航 空航 天 大 学 , 苏 南 京 10 6 2南京 江
zHANG e - L i-.YU e .LIT n . u Yu o gh a
(.a igC lg n r t nTc nl y N ni 106 C i ; 1 n n o eeo f mao eh o g , aj g2 0 4 , hn N j l fio i o n a
无 轴承 P M 的气隙 磁场 由永 磁 体 、 MS 电机定 子 绕组
和 径 向力绕 组三 者 产 生 的磁场 组成 , 隙磁 场方 向 气
确 定 的准 确度 直接影 响到对 电机 转子 的径 向控 制 。
当 电机 带有 负载 时 ,转 矩绕 组 中 电流 i 。 q 即 ≠0
v co o t l meh d i u e o o ti e t e d c u l g c n r lb t e n rv li g t r u n a ilf re , e d gtl e tr c nr t o s s d t b an h e o p i o to ew e e ov n o q e a d r d a oc s t i i o n h a
・
2N nigU i r t oaeoat s n s oa ts N ni 2 0 1 , hn ) .a n n esy f nui dA t nui , aj 10 6 C ia j v i r ca r c n
电 力 电 子 技 术
Po rElcr nis we e to c
Vo .4,N . 1 4 o5 Ma , 01 y2 0
无轴承永磁 同步电机数字控制系统的设计
张 磊 1,俞 , 2 跃 , 同华 。 李
201) 10 6 (. 京 信息 职 业 技术 学 院 , 苏 南 京 1 南 江 2 04 ; . 航 空航 天 大 学 , 苏 南 京 10 6 2南京 江
zHANG e - L i-.YU e .LIT n . u Yu o gh a
(.a igC lg n r t nTc nl y N ni 106 C i ; 1 n n o eeo f mao eh o g , aj g2 0 4 , hn N j l fio i o n a
无 轴承 P M 的气隙 磁场 由永 磁 体 、 MS 电机定 子 绕组
和 径 向力绕 组三 者 产 生 的磁场 组成 , 隙磁 场方 向 气
确 定 的准 确度 直接影 响到对 电机 转子 的径 向控 制 。
当 电机 带有 负载 时 ,转 矩绕 组 中 电流 i 。 q 即 ≠0
v co o t l meh d i u e o o ti e t e d c u l g c n r lb t e n rv li g t r u n a ilf re , e d gtl e tr c nr t o s s d t b an h e o p i o to ew e e ov n o q e a d r d a oc s t i i o n h a
・
2N nigU i r t oaeoat s n s oa ts N ni 2 0 1 , hn ) .a n n esy f nui dA t nui , aj 10 6 C ia j v i r ca r c n
无轴承永磁同步电动机悬浮力的前馈解耦控制方法

在 同步旋 转 d g坐标 下 , 面 式无 轴 承 永磁 同 步 、 表
电 动
机 悬 浮 力
交叉耦合关系 , 严重时会导致转子悬浮失败 , 因此无 轴承 电机永 磁 同步 电动机 的解 耦控 制是 实现 其稳 定
悬浮 和 调速 运行 的关 键环 节 。
迄 今 有关 无 轴承永 磁 同步 电动 机悬 浮力 的解耦 方法 , 一种 是 采用 完 全 依 赖 于被 控 电机 精 确 模 型 的 解 析逆 系统 方 法 J该 方 法 仅 能 实 现 近 似 解 耦 , , 对 电机参 数 变化 和 负 载扰 动 的鲁 棒 性 较 差 ; 一 种 是 另
0引 言
无 轴 承永 磁 同步 电动机 将用 于产 生径 向悬 浮力 的悬 浮绕 组和 普通 永磁 同步 电动 机 固有 的转矩 绕组
起叠 放 在定 子 中 , 而 实现 转 子 的稳 定 悬 浮 和 电 从 磁 转矩 输 出 【2。无 轴 承永 磁 同步 电 动机 具 有 高转 1] -
; i使 得转 矩和 悬 浮 力 之 间存 在 耦 合 , 外 相互 垂 直 此
j 的两悬浮力分量也通过各 自的控制 电流 i i形成 交叉耦合 , 消除上述多变量 之间的耦合关系是实现
j 电机稳 定悬 浮 的前提 。 当 电机 转子 偏 心 时 , 转子 上会 产生 单 边 磁拉 力
间以及 悬浮力和 电磁转矩之 间的解耦 控制是提高其系统性能 的关键 。建立 了无轴 承永磁 同步 电动机耦合 的悬浮力 模 型 , 出了一种前 馈解 耦方法 , 提 设计 了前馈 解耦 控制器 , 将之 串接于悬浮 子系统 中, 实现 了上 述多变量之 间的完全
解耦 , 进行 了控制系统 的仿真研究 。仿 真结果证实 了控制方案 的可行性 , 控制系统具有优 良的动 、 静态调节性能 。
无轴承永磁电机悬浮波动抑制策略
i g p f r a c a fe td i he lv t ton fuc u to sl g . I sv tlt on t an t e ia in fucu— n ero m n e c n be a f ce ft e ia i l t a in i ar e ti ia o c s r i hel vt to l t , 苏 南京 2 0 1 ) 江 1 0 6
摘 要 : 轴 承 电 机 运 行过 程 中 不 可避 免 地 产 生 悬 浮 波 动 。悬 浮 波 动 过 大 会 影 响 电机 性 能 , 效 抑 制 悬 浮 无 有
波 动 是 保 证 电机 正 常 工 作 的关 键 。考 虑 到 无 轴 承 电 机 悬 浮 控 制 常 用 的 P D控 制 算 法 对 扰 动 抑 制 针 对 性 不 强 I 的缺 点 , 分 析 悬 浮 波 动 源 和 常规 观测 算 法 不 足 的基 础 上 , 一 种 交 替 极无 轴承 永 磁 电机 为 研 究 对 象 , 出利 在 以 提
(.De a t n f etia n eto i gn eig,Na jn nt ueo n utya d Tc n lg 1 p rme t Elcrcla d El rnc En iern o c s n ig Isi t f Id sr n eh oo y, t
N a j n 1 0 6 J a g u, h n 2 n ig 2 0 4 , i n s C ia; .Colg fAu o to g n e ig,Na jn ie st le e o tma in En i ern n i gUn v riy
电气 传 动 2 1 0 2年 第 4 2卷 第 8期
E E TR CDR VE 2 1 Vo.2 N . L C I I 0 2 14 o 8
摘 要 : 轴 承 电 机 运 行过 程 中 不 可避 免 地 产 生 悬 浮 波 动 。悬 浮 波 动 过 大 会 影 响 电机 性 能 , 效 抑 制 悬 浮 无 有
波 动 是 保 证 电机 正 常 工 作 的关 键 。考 虑 到 无 轴 承 电 机 悬 浮 控 制 常 用 的 P D控 制 算 法 对 扰 动 抑 制 针 对 性 不 强 I 的缺 点 , 分 析 悬 浮 波 动 源 和 常规 观测 算 法 不 足 的基 础 上 , 一 种 交 替 极无 轴承 永 磁 电机 为 研 究 对 象 , 出利 在 以 提
(.De a t n f etia n eto i gn eig,Na jn nt ueo n utya d Tc n lg 1 p rme t Elcrcla d El rnc En iern o c s n ig Isi t f Id sr n eh oo y, t
N a j n 1 0 6 J a g u, h n 2 n ig 2 0 4 , i n s C ia; .Colg fAu o to g n e ig,Na jn ie st le e o tma in En i ern n i gUn v riy
电气 传 动 2 1 0 2年 第 4 2卷 第 8期
E E TR CDR VE 2 1 Vo.2 N . L C I I 0 2 14 o 8
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 m Fe m 0 2 B z ( Bn m Fe m 0 H t2 ) n 2m Fe m 0 2m 0
上海大学
Page 16
无轴承永磁电机数学建模(以表贴式为例)
麦克斯韦力作用方向垂直于转子表面,一般分析电机气隙磁场时都是假定 气隙磁密是对称均匀分布的,此时其合成麦克斯韦力为零,如左图所示。
无轴承永磁电机及其控制
上海大学机自学院自动化系 仇志坚 qiuzhijian@
无轴承永磁电机及其控制
无轴承永磁同步电机研究现状
无轴承永磁同步电机结构原理
无轴承永磁同步电机建模方法
无轴承永磁同步电机解耦控制策略
无轴承永磁同步电机控制系统
上海大学
Page 2
永磁型无轴承电机研究现状
上海大学
Page 9
无轴承永磁电机及其控制
无轴承永磁同步电机研究现状
无轴承永磁同步电机结构原理
无轴承永磁同步电机建模方法
无轴承永磁同步电机解耦控制策略
无轴承永磁同步电机控制系统
上海大学
Page 10
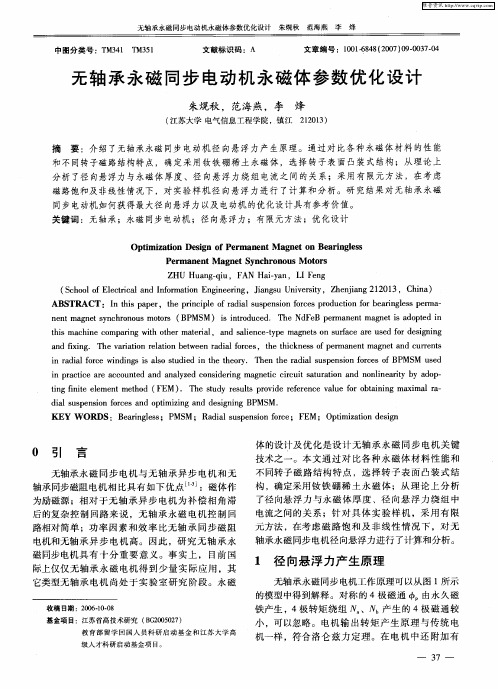
无轴承永磁电机结构(以表贴式为例)
三相对称分布绕组N1A,N1B和N1C与普通永磁同步电机相同,主要用于产生无 轴承永磁同步电机的电磁转矩,一般称之为转矩控制绕组(极对数p1=2,电角 频率w1);另一套三相对称分布绕组N2A,N2B和N2C用来产生磁悬浮力,控制 电机转子径向悬浮,一般称之为悬浮控制绕组(极对数p2=1,电角频率w2)。
上海大学
Page 6
永磁型无轴承电机研究趋势
(3)无轴承电机新型结构的研究
传统的永磁型无轴承电机以表面贴装式永磁电机为主,其悬浮力和转矩输出 能力相互制约,永磁体厚度的选择必须折中考虑,太厚或太薄分别对悬浮力 和转矩输出都有不利的影响,从而导致电机承载力和刚度较小、弱磁能力差、 永磁体易退磁等诸多问题,严重制约了永磁型无轴承电机的应用和发展。 ①永磁体转子两端附加一套转子铁心,构成永磁-磁阻混合型转子结构,以此 提高转矩和悬浮力。 ②交替极(consequent-pole)永磁型无轴承电机从定转子磁路结构上实现 了电机转矩控制与悬浮控制的解耦,悬浮力的控制不再需要转矩控制绕组磁 场定向的位置角,从而在电机本体设计的角度上解决了控制的耦合性。 ③此外,传统的无轴承电机本身只能实现两自由度的悬浮,而对必须实现五 自由度稳定悬浮的整个电机控制系统来说,尚需要磁轴承或其他部件来控制 剩余三个自由度的悬浮。(轴向主动悬浮的三自由度无轴承电机) ④单绕组无轴承永磁电机:通过改变转矩绕组的连接方式和控制方法,一套 绕组即可实现电机的无轴承化。
上海大学
Page 5
永磁型无轴承电机研究趋势
(2)无轴承电机本体优化设计的研究
目前永磁型无轴承电机本体研究主要是对现有永磁型无轴承电机定转子尺寸、 转子永磁体结构形式、定子槽形优化、两套绕组匝数和线径及其绕制方式的 设计研究。仍然是将转矩控制绕组设计与悬浮控制绕组设计割裂开来,借鉴 了普通电机转矩控制绕组的设计过程与经验公式来设计悬浮控制绕组,没有 对悬浮控制绕组匝数、线径与槽满率及悬浮功率,悬浮力与悬浮性能之间的 优化原则进行系统细致的分析研究。 因此也无法像普通电机转矩控制绕组设计那样从总体上把握与预测所设计出 的电机性能优劣,同时无轴承电机转矩控制绕组的设计目前也没有考虑在附 加了另一套绕组之后对转矩控制绕组电磁耦合的影响。特别是在高速、超高 速情况下,转子永磁体与两套绕组如何优化设计才能使电机电磁性能最优, 对现有永磁型无轴承电机的本体研究具有重大意义。
上海大学
Page 8
永磁型无轴承电机研究趋势
(5)无速度无位移传感器技术的研究
永磁型无轴承电机采用的磁场定向控制的性能受需要检测的转子位置和速度 精度的影响较大,而悬浮力与转矩的解耦控制性能又受转矩控制绕组所检测 的气隙磁场空间位置与幅值的影响。对在高速领域具备独特优良性能的无轴 承电机来说,显然采用机械式传感器显得不合时宜。因此研究无轴承电机的 无位置/速度传感器运行已成为无轴承电机实现高速、超高速化的迫切需要。 检测转子悬浮位移的电涡流传感器一方面存在安装精度与可靠性问题,另一 方面传感器数量多,造价昂贵,又占有一定的轴向检测空间,增加了无轴承 电机系统的体积和长度,不利于无轴承电机的实用化。现有无位移传感器检 测技术都是基于电机绕组自感变化或互感变化的,有通过绕制在定子齿上的 附加探测线圈测量出包含转子位移信号的差动电压信号来辨识转子位移,也 有从悬浮控制绕组功率变换器的开关信号中提取转子位移信息的,还有利用 高频电压注入法在悬浮控制绕组中施加高频激励来获取转子位移信号的。现 有的无位移传感器技术的研究尚处于起步阶段,所提取的转子位移信号还未 能满足工业实际应用。
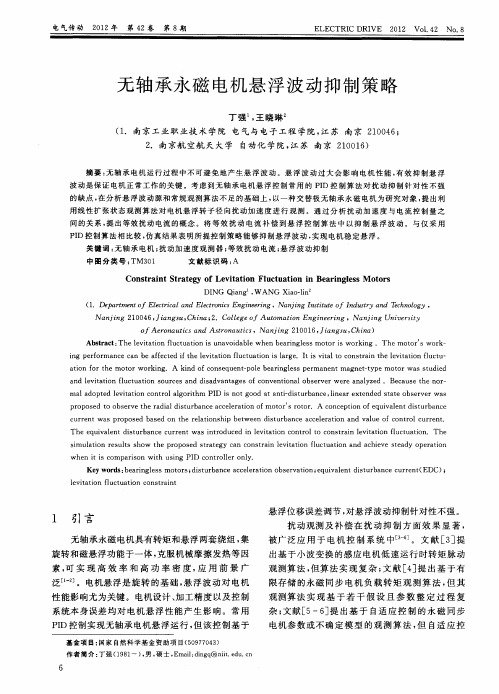
位置传感器 基准环 定子 转子永磁体 悬 浮 端 . 光码盘
上海大学
辅助轴承 机壳 转矩、悬浮控制绕组 调心辅助轴承
Page 12
无轴承永磁电机原理(以表贴式为例)
图 无轴承永磁同步电机是在普通永磁同步电机定子电枢铁心原有绕组基 (a)中转矩绕组磁场与悬浮绕组磁场在右侧同向而增强,左侧反向而 础上再叠绕一套绕组,通过两套绕组磁场的叠加使电机同时具有旋转 减弱,从而产生向右的磁拉力,而图(b)中两套绕组磁场叠加后产生 向上的磁拉力。通过有效控制两套绕组的电流即可产生可控的任意方 和自悬浮能力。 向和大小的磁拉力。由传感器测得转子的偏心位移,进行转子径向位 其中转矩控制绕组通适当电流后产生旋转磁场带动永磁转子以同步转 移的负反馈控制,根据一定的算法可求出两套绕组所需的电流,从而 速旋转,而悬浮控制绕组通以电流后产生的磁场叠加在电机原旋转磁 控制转子上的径向悬浮力的大小和方向,实现转子的稳定悬浮。 场上,打破了原有的磁场平衡,使得合成的气隙磁场作用在转子上产 生一定方向和大小的磁拉力。 关键:两套绕组磁场的相位关系
Page 4
永磁型无轴承电机研究趋势
(1)磁悬浮机理与数学模型研究
永磁型无轴承电机内的悬浮控制绕组、转矩控制绕组、永磁体磁场通过气隙 磁场互相耦合,电磁悬浮力和电磁转矩产生过程包含机、电、磁的各种暂态 与稳态运动过程,具有极强的非线性耦合特征,而现有的研究多采用磁共能 法、麦克斯韦张量法、有限元法等来独立建立转矩控制绕组与悬浮控制绕组 数学模型,难以反映两者间的动态非线性耦合。且不同转子结构的永磁型无 轴承电机,悬浮机理与磁链方程、电压电流方程、电磁悬浮力方程、电磁转 矩方程及其等效电路等数学模型也各有差异,因此要想获得高品质的转矩与 悬浮控制性能,必须深入研究其内部的能量转化关系,综合考虑铁心磁饱和 效应,定子齿槽效应、谐波分量以及转子偏心等诸多因素,在此基础上建立 更加准确的数学模型。 此外,现有的无轴承电机数学模型研究多集中在径向两自由度悬浮的无轴承 电机上,而对整个五自由度悬浮的电机系统数学模型研究较少。五自由度悬 浮的电机系统不仅存在内部的电磁耦合,而且各个悬浮自由度之间还存在着 机械动力耦合,因此从整个大系统的角度,结合转子动力学和现代控制理论 开展五自由度悬浮数学模型的研究是无轴承电机系统走上实用化的关键所在。
但实际由于电机加工及装配等原因会造成转子偏心,特别是对无轴承电机 来说,其转轴与辅助机械轴承之间是有间隙的,实际悬浮运行时定、转子 位置必定不同心,使得电机中的气隙磁密分布不均匀,麦克斯韦合力就不 为零。其作用方向和转子偏心的方向一致,转子的偏心量越大,麦克斯韦 力也越大,因此为负刚度的磁拉力。 为了实现转子悬浮,必须利用位移的负反馈控制将麦克斯韦力的负刚度改 变为正刚度。通过主动调节悬浮控制绕组电流的幅值与方向,产生相应的 悬浮控制磁场改变原有磁场在气隙中的对称分布,依靠可控的麦克斯韦力 将转子拉回平衡位置。
3
5 6 7 8 9
10 114Fra bibliotek21
21 20
4 5 6 7
19
3
2
1
21 20 19
转矩绕组 N1A N1B N1C
17
悬浮绕组 N2A N2B N2C 9
10 16 15 11 12 13 14
18 17
8
18
16 12 13 14 15
上海大学
Page 11
无轴承永磁电机结构
图中电机转子悬浮端装有辅助滚动轴承,以防止在没有施加径向悬浮力 电流时电机转子与定子相碰撞。辅助轴承与转子转轴之间存在间隙,当 悬浮控制绕组通入电流产生悬浮力,转子转轴便脱离该机械辅助轴承而 悬浮,辅助轴承也就停止不动。测量转子位移的位置传感器安装在电机 转子悬浮端一侧的电机端盖上,基准环紧配合于电机转轴上用于测量转 子径向位移量。转子转轴另一端由调心辅助轴承支撑,其与转子转轴之 间不存在间隙,其作用相当于一个支点,将电机系统的另外三自由度控 制住。用来测量转速的光码盘安装在调心辅助轴承一侧的电机端盖上。
永磁型无轴承电机:功率密度大、长 寿命、高效率和体积小,在飞轮储能、 泵类、压缩机、卫星姿态调整等领域 更具备实用化的优势。
苏黎世联邦工学院和Levitronix公司研制 成功的无轴承永磁电机驱动的血泵以及 可移植到人体内的左心室辅助装置已在 临床中应用。 东京理工大学和MotorSolution公司于 2008年将交替极型无轴承永磁电机应用 于半导体制造工厂中的超纯水泵的电机, 其最高转速为6000r/min、功率为1.2kW。
上海大学
Page 7
永磁型无轴承电机研究趋势
(4)无轴承电机解耦控制算法的研究
目前研究的无轴承永磁电机控制策略中,转矩控制子系统和悬浮控制子系统 之间大多存在气隙磁场信息传递,电机的转矩控制与悬浮力控制之间存在非 线性强耦合特性,使得两者控制策略相互制约,导致解耦算法复杂,不利于 实用化。因此,采用转矩控制子系统和悬浮控制子系统独立控制,既使得悬 浮控制摆脱转矩控制绕组磁场定向控制精度以及其参数变化的影响,又可实 现转矩控制绕组可以采用通用变频器,提高了实用性。 无轴承电机相对于普通电机结构更为复杂,不同工况下的电机参数变化对转 矩控制和悬浮控制性能造成的影响更为明显。一方面,通过运用现代控制理 论的方法,例如模型参考自适应控制对绕组电感系数等相应参数测量、辨识 或采用补偿控制来消除参数变化对电机转速、电磁悬浮力和电磁转矩等性能 指标的影响,从而提高悬浮运行控制的鲁棒性。另一方面,鉴于无轴承电机 本身是一个多变量、非线性、强耦合的控制对象,选择稳定性好、鲁棒性强、 适用面广的控制方法设计出性能优良的控制器如H∞控制,以提高无轴承系统 的稳定性和动态特性。
上海大学
Page 16
无轴承永磁电机数学建模(以表贴式为例)
麦克斯韦力作用方向垂直于转子表面,一般分析电机气隙磁场时都是假定 气隙磁密是对称均匀分布的,此时其合成麦克斯韦力为零,如左图所示。
无轴承永磁电机及其控制
上海大学机自学院自动化系 仇志坚 qiuzhijian@
无轴承永磁电机及其控制
无轴承永磁同步电机研究现状
无轴承永磁同步电机结构原理
无轴承永磁同步电机建模方法
无轴承永磁同步电机解耦控制策略
无轴承永磁同步电机控制系统
上海大学
Page 2
永磁型无轴承电机研究现状
上海大学
Page 9
无轴承永磁电机及其控制
无轴承永磁同步电机研究现状
无轴承永磁同步电机结构原理
无轴承永磁同步电机建模方法
无轴承永磁同步电机解耦控制策略
无轴承永磁同步电机控制系统
上海大学
Page 10
无轴承永磁电机结构(以表贴式为例)
三相对称分布绕组N1A,N1B和N1C与普通永磁同步电机相同,主要用于产生无 轴承永磁同步电机的电磁转矩,一般称之为转矩控制绕组(极对数p1=2,电角 频率w1);另一套三相对称分布绕组N2A,N2B和N2C用来产生磁悬浮力,控制 电机转子径向悬浮,一般称之为悬浮控制绕组(极对数p2=1,电角频率w2)。
上海大学
Page 6
永磁型无轴承电机研究趋势
(3)无轴承电机新型结构的研究
传统的永磁型无轴承电机以表面贴装式永磁电机为主,其悬浮力和转矩输出 能力相互制约,永磁体厚度的选择必须折中考虑,太厚或太薄分别对悬浮力 和转矩输出都有不利的影响,从而导致电机承载力和刚度较小、弱磁能力差、 永磁体易退磁等诸多问题,严重制约了永磁型无轴承电机的应用和发展。 ①永磁体转子两端附加一套转子铁心,构成永磁-磁阻混合型转子结构,以此 提高转矩和悬浮力。 ②交替极(consequent-pole)永磁型无轴承电机从定转子磁路结构上实现 了电机转矩控制与悬浮控制的解耦,悬浮力的控制不再需要转矩控制绕组磁 场定向的位置角,从而在电机本体设计的角度上解决了控制的耦合性。 ③此外,传统的无轴承电机本身只能实现两自由度的悬浮,而对必须实现五 自由度稳定悬浮的整个电机控制系统来说,尚需要磁轴承或其他部件来控制 剩余三个自由度的悬浮。(轴向主动悬浮的三自由度无轴承电机) ④单绕组无轴承永磁电机:通过改变转矩绕组的连接方式和控制方法,一套 绕组即可实现电机的无轴承化。
上海大学
Page 5
永磁型无轴承电机研究趋势
(2)无轴承电机本体优化设计的研究
目前永磁型无轴承电机本体研究主要是对现有永磁型无轴承电机定转子尺寸、 转子永磁体结构形式、定子槽形优化、两套绕组匝数和线径及其绕制方式的 设计研究。仍然是将转矩控制绕组设计与悬浮控制绕组设计割裂开来,借鉴 了普通电机转矩控制绕组的设计过程与经验公式来设计悬浮控制绕组,没有 对悬浮控制绕组匝数、线径与槽满率及悬浮功率,悬浮力与悬浮性能之间的 优化原则进行系统细致的分析研究。 因此也无法像普通电机转矩控制绕组设计那样从总体上把握与预测所设计出 的电机性能优劣,同时无轴承电机转矩控制绕组的设计目前也没有考虑在附 加了另一套绕组之后对转矩控制绕组电磁耦合的影响。特别是在高速、超高 速情况下,转子永磁体与两套绕组如何优化设计才能使电机电磁性能最优, 对现有永磁型无轴承电机的本体研究具有重大意义。
上海大学
Page 8
永磁型无轴承电机研究趋势
(5)无速度无位移传感器技术的研究
永磁型无轴承电机采用的磁场定向控制的性能受需要检测的转子位置和速度 精度的影响较大,而悬浮力与转矩的解耦控制性能又受转矩控制绕组所检测 的气隙磁场空间位置与幅值的影响。对在高速领域具备独特优良性能的无轴 承电机来说,显然采用机械式传感器显得不合时宜。因此研究无轴承电机的 无位置/速度传感器运行已成为无轴承电机实现高速、超高速化的迫切需要。 检测转子悬浮位移的电涡流传感器一方面存在安装精度与可靠性问题,另一 方面传感器数量多,造价昂贵,又占有一定的轴向检测空间,增加了无轴承 电机系统的体积和长度,不利于无轴承电机的实用化。现有无位移传感器检 测技术都是基于电机绕组自感变化或互感变化的,有通过绕制在定子齿上的 附加探测线圈测量出包含转子位移信号的差动电压信号来辨识转子位移,也 有从悬浮控制绕组功率变换器的开关信号中提取转子位移信息的,还有利用 高频电压注入法在悬浮控制绕组中施加高频激励来获取转子位移信号的。现 有的无位移传感器技术的研究尚处于起步阶段,所提取的转子位移信号还未 能满足工业实际应用。
位置传感器 基准环 定子 转子永磁体 悬 浮 端 . 光码盘
上海大学
辅助轴承 机壳 转矩、悬浮控制绕组 调心辅助轴承
Page 12
无轴承永磁电机原理(以表贴式为例)
图 无轴承永磁同步电机是在普通永磁同步电机定子电枢铁心原有绕组基 (a)中转矩绕组磁场与悬浮绕组磁场在右侧同向而增强,左侧反向而 础上再叠绕一套绕组,通过两套绕组磁场的叠加使电机同时具有旋转 减弱,从而产生向右的磁拉力,而图(b)中两套绕组磁场叠加后产生 向上的磁拉力。通过有效控制两套绕组的电流即可产生可控的任意方 和自悬浮能力。 向和大小的磁拉力。由传感器测得转子的偏心位移,进行转子径向位 其中转矩控制绕组通适当电流后产生旋转磁场带动永磁转子以同步转 移的负反馈控制,根据一定的算法可求出两套绕组所需的电流,从而 速旋转,而悬浮控制绕组通以电流后产生的磁场叠加在电机原旋转磁 控制转子上的径向悬浮力的大小和方向,实现转子的稳定悬浮。 场上,打破了原有的磁场平衡,使得合成的气隙磁场作用在转子上产 生一定方向和大小的磁拉力。 关键:两套绕组磁场的相位关系
Page 4
永磁型无轴承电机研究趋势
(1)磁悬浮机理与数学模型研究
永磁型无轴承电机内的悬浮控制绕组、转矩控制绕组、永磁体磁场通过气隙 磁场互相耦合,电磁悬浮力和电磁转矩产生过程包含机、电、磁的各种暂态 与稳态运动过程,具有极强的非线性耦合特征,而现有的研究多采用磁共能 法、麦克斯韦张量法、有限元法等来独立建立转矩控制绕组与悬浮控制绕组 数学模型,难以反映两者间的动态非线性耦合。且不同转子结构的永磁型无 轴承电机,悬浮机理与磁链方程、电压电流方程、电磁悬浮力方程、电磁转 矩方程及其等效电路等数学模型也各有差异,因此要想获得高品质的转矩与 悬浮控制性能,必须深入研究其内部的能量转化关系,综合考虑铁心磁饱和 效应,定子齿槽效应、谐波分量以及转子偏心等诸多因素,在此基础上建立 更加准确的数学模型。 此外,现有的无轴承电机数学模型研究多集中在径向两自由度悬浮的无轴承 电机上,而对整个五自由度悬浮的电机系统数学模型研究较少。五自由度悬 浮的电机系统不仅存在内部的电磁耦合,而且各个悬浮自由度之间还存在着 机械动力耦合,因此从整个大系统的角度,结合转子动力学和现代控制理论 开展五自由度悬浮数学模型的研究是无轴承电机系统走上实用化的关键所在。
但实际由于电机加工及装配等原因会造成转子偏心,特别是对无轴承电机 来说,其转轴与辅助机械轴承之间是有间隙的,实际悬浮运行时定、转子 位置必定不同心,使得电机中的气隙磁密分布不均匀,麦克斯韦合力就不 为零。其作用方向和转子偏心的方向一致,转子的偏心量越大,麦克斯韦 力也越大,因此为负刚度的磁拉力。 为了实现转子悬浮,必须利用位移的负反馈控制将麦克斯韦力的负刚度改 变为正刚度。通过主动调节悬浮控制绕组电流的幅值与方向,产生相应的 悬浮控制磁场改变原有磁场在气隙中的对称分布,依靠可控的麦克斯韦力 将转子拉回平衡位置。
3
5 6 7 8 9
10 114Fra bibliotek21
21 20
4 5 6 7
19
3
2
1
21 20 19
转矩绕组 N1A N1B N1C
17
悬浮绕组 N2A N2B N2C 9
10 16 15 11 12 13 14
18 17
8
18
16 12 13 14 15
上海大学
Page 11
无轴承永磁电机结构
图中电机转子悬浮端装有辅助滚动轴承,以防止在没有施加径向悬浮力 电流时电机转子与定子相碰撞。辅助轴承与转子转轴之间存在间隙,当 悬浮控制绕组通入电流产生悬浮力,转子转轴便脱离该机械辅助轴承而 悬浮,辅助轴承也就停止不动。测量转子位移的位置传感器安装在电机 转子悬浮端一侧的电机端盖上,基准环紧配合于电机转轴上用于测量转 子径向位移量。转子转轴另一端由调心辅助轴承支撑,其与转子转轴之 间不存在间隙,其作用相当于一个支点,将电机系统的另外三自由度控 制住。用来测量转速的光码盘安装在调心辅助轴承一侧的电机端盖上。
永磁型无轴承电机:功率密度大、长 寿命、高效率和体积小,在飞轮储能、 泵类、压缩机、卫星姿态调整等领域 更具备实用化的优势。
苏黎世联邦工学院和Levitronix公司研制 成功的无轴承永磁电机驱动的血泵以及 可移植到人体内的左心室辅助装置已在 临床中应用。 东京理工大学和MotorSolution公司于 2008年将交替极型无轴承永磁电机应用 于半导体制造工厂中的超纯水泵的电机, 其最高转速为6000r/min、功率为1.2kW。
上海大学
Page 7
永磁型无轴承电机研究趋势
(4)无轴承电机解耦控制算法的研究
目前研究的无轴承永磁电机控制策略中,转矩控制子系统和悬浮控制子系统 之间大多存在气隙磁场信息传递,电机的转矩控制与悬浮力控制之间存在非 线性强耦合特性,使得两者控制策略相互制约,导致解耦算法复杂,不利于 实用化。因此,采用转矩控制子系统和悬浮控制子系统独立控制,既使得悬 浮控制摆脱转矩控制绕组磁场定向控制精度以及其参数变化的影响,又可实 现转矩控制绕组可以采用通用变频器,提高了实用性。 无轴承电机相对于普通电机结构更为复杂,不同工况下的电机参数变化对转 矩控制和悬浮控制性能造成的影响更为明显。一方面,通过运用现代控制理 论的方法,例如模型参考自适应控制对绕组电感系数等相应参数测量、辨识 或采用补偿控制来消除参数变化对电机转速、电磁悬浮力和电磁转矩等性能 指标的影响,从而提高悬浮运行控制的鲁棒性。另一方面,鉴于无轴承电机 本身是一个多变量、非线性、强耦合的控制对象,选择稳定性好、鲁棒性强、 适用面广的控制方法设计出性能优良的控制器如H∞控制,以提高无轴承系统 的稳定性和动态特性。