声纳工作原理的简易说明
声纳是原理
声纳是原理
声纳是一种利用声波进行探测和测距的技术,它在海洋、航空、地质勘探等领域有着广泛的应用。
声纳的原理是利用声波在不同介质中传播速度不同的特性,通过发送声波并接收回波来获取目标的位置和特征。
本文将详细介绍声纳的原理及其在不同领域的应用。
首先,声纳的原理是基于声波在不同介质中传播速度不同的特性。
当声波遇到介质边界时,会发生折射和反射,从而产生回波。
声纳系统利用这种回波来获取目标的信息。
声波在水中传播速度约为1500m/s,而在空气中传播速度约为340m/s,因此声纳可以在水下和空中进行探测和测距。
其次,声纳在海洋领域有着重要的应用。
海洋声纳可以用于探测潜艇、测量海底地形、观测海洋生物等。
通过分析声纳回波的特征,可以确定目标的位置、速度和尺寸,从而实现对海洋环境的监测和控制。
此外,声纳在航空领域也有着重要的应用。
航空声纳可以用于飞机的导航、目标探测和避障。
通过发送声波并接收回波,可以实现对空中目标的定位和跟踪,提高飞行安全性和效率。
另外,声纳在地质勘探领域也发挥着重要作用。
地质声纳可以用于勘探地下资源、探测地下结构和岩层,为石油、矿产等资源的开发提供重要的技术支持。
总之,声纳作为一种利用声波进行探测和测距的技术,具有广泛的应用前景。
它的原理是利用声波在不同介质中传播速度不同的特性,通过发送声波并接收回波来获取目标的位置和特征。
在海洋、航空、地质勘探等领域都有着重要的应用,为相关领域的发展和进步提供了重要的技术支持。
随着科学技术的不断发展,相信声纳技术将会有更加广泛和深入的应用,为人类社会的发展做出更大的贡献。
声纳工作原理
声纳工作原理声纳(Sonar)是一种利用声波进行探测和测距的技术。
它已广泛应用于水下通信、海洋探测、声呐定位和鱼群捕捞等领域。
本文将介绍声纳的工作原理及其应用。
一、声纳的原理声纳的工作原理基于声波在水中传播的特性。
声波是一种机械波,它通过振动介质传播能量。
声波在水中传播的速度大约为1500米/秒,远远快于在空气中传播的速度。
声纳系统由发送器和接收器组成。
发送器发出脉冲声波,接收器接收并分析返回的声波信号。
声纳系统通过测量声波的传播时间和幅度来判断目标的位置和性质。
当发送器发出脉冲声波时,它会在水中形成一个声波束。
这个声波束从发送器向四面八方扩散,当遇到障碍物时,一部分声波会被反射回来。
接收器会接收到这些反射回来的声波信号。
二、声纳的应用1. 水下通信声纳在水下通信中发挥着重要作用。
人类无法直接用肉眼观察水下环境,但通过声纳技术可以实现远程水下通信。
声纳信号可以在水中传播数百公里,能够与水下设备、潜艇和水下机器人进行可靠的通信。
2. 水下探测声纳可以用于水下探测和测量。
通过发送脉冲声波,声纳系统能够确定目标物体的距离和方位,并产生目标物体的声纳图像。
这对于海洋勘探、水下地质研究和海洋生态调查具有重要意义。
3. 声呐定位声呐定位是指使用声纳技术来确定目标物体的位置。
声纳系统可以通过测量声波的传播时间来计算目标物体的距离,并通过分析返回的声波信号来确定目标物体的方位。
4. 鱼群捕捞声纳广泛应用于渔业中的鱼群捕捞。
通过发送声波信号,声纳系统可以检测到鱼群的存在和位置,并帮助渔民选择合适的捕鱼区域和捕鱼工具,提高捕鱼效率。
三、声纳技术的发展趋势随着科技的不断进步,声纳技术也在不断创新和发展。
未来声纳技术将更加精确和高效。
1. 声纳的高分辨率高分辨率声纳系统将能够提供更清晰、更详细的声纳图像,从而实现对水下环境更准确的观测和探测。
2. 声纳的自动化和智能化声纳系统将更加自动化和智能化,通过采用先进的信号处理算法和人工智能技术,能够实现目标物体的自动识别和分类。
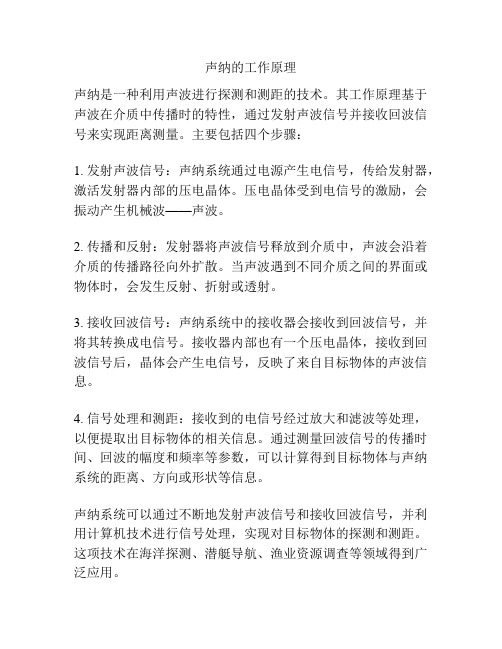
声呐工作原理
声呐工作原理
声呐(Sonar)是一种利用声波的原理来探测和定位目标的技术。
声呐是将电能转换成声能,利用声波在水中传播的特性进行海洋探测的装置。
声呐的工作原理如下:
1. 发射声波:声呐中的发声装置会发射出一束声波,通常是超声波。
这些声波以某一特定频率发射,并且以固定的方向传播出去。
2. 声波传播:发射出的声波会在水中传播。
声波传播的速度和方向都会受到水的条件、温度等因素的影响。
3. 目标反射:当声波遇到某个目标物体时,部分能量会被目标物体反射回来。
这可能是海底、海洋生物或其他物体。
4. 接收反射信号:声呐中的接收装置会接收到反射回来的声波信号。
接收装置可以通过接收到的信号特征来识别目标的位置、形状和距离。
5. 信号处理:接收到的信号会经过信号处理,包括滤波、放大、解调等,以提取有用的信息。
6. 数据分析:通过对接收到的信号进行分析,可以得出目标物体的距离、方向和形状等信息。
声呐工作原理利用了声波在水中传播的特性,通过分析发射出
的声波和接收到的反射信号,可以实现检测和定位目标物体的功能。
声纳技术的原理及应用
声纳技术的原理及应用一、声纳技术的基本原理声纳技术是利用声波在介质中传播的原理来实现远程探测和通信的一种技术。
声纳技术主要利用声波在水中传播速度较快的特点,通过发射声波信号并接收回波来实现海洋探测、水下通信、水下导航等应用。
二、声纳技术的工作原理声纳技术主要包括发射、传播和接收三个过程。
2.1 发射发射是指通过将电能转化为声能,使其转变为可传播的声波信号。
通常采用的方式是通过压电陶瓷等材料的振动来实现声波的发射。
发射器产生的声波信号通常是由脉冲信号组成的,可以通过调整频率和幅度来实现不同的探测目标和距离。
2.2 传播传播是指声波信号在介质中传播的过程。
声波在水中的传播速度通常为1500米/秒左右,但会受到水温、盐度等因素的影响而发生变化。
在传播过程中,声波会受到介质的衰减、散射和折射等影响,这些影响会导致声波的强度衰减和方向改变。
2.3 接收接收是指将传播中的声波信号转换为电信号的过程。
通常采用的方式是利用接收器中的压电陶瓷等材料将声波转化为电压信号。
接收器中的电路会放大和处理接收到的信号,然后将其输出到显示设备或存储设备上,以便进行分析和应用。
三、声纳技术的应用3.1 海洋探测声纳技术在海洋探测中发挥着重要作用。
利用声纳技术可以探测海洋中的水下地形、海底构造和海洋生物等信息。
声纳系统可以通过发射声波信号并接收回波来获取水下目标的位置、形状和运动状态。
海洋勘探、海底资源开发和海洋环境监测等领域都需要广泛应用声纳技术。
3.2 水下通信声纳技术还可以实现水下通信。
传统的无线电通信在水下传播会受到很大的阻碍,而声纳技术可以通过水中的声波传播来实现远距离的通信。
水下声纳通信可以用于海洋科学研究、水下作业和潜艇通信等领域。
声纳通信可以实现点对点的通信,也可以实现多个节点之间的网络通信。
3.3 水下导航声纳技术还可以用于水下导航。
通过发射声波信号并记录回波的时间差和强度变化,可以实现对水下目标的定位和导航。
声纳的工作原理

声纳的工作原理
声纳是一种利用声波的反射和传播原理来探测和定位目标的技术。
它的工作原理可以简单概括为发射声波,接收被目标反射回来的声波,并通过计算声波的传播时间和强度等参数来确定目标的位置和性质。
在声纳中,声波是通过水或空气等介质传播的。
首先,声纳系统会发出一个脉冲状的声波信号,通常是超声波或低频声波。
这个信号会在水或空气中传播,并遇到目标后发生反射。
当声波遇到目标表面时,一部分能量会被目标吸收,一部分会被目标反射回来。
反射回来的声波会被声纳的接收器捕捉到,并转化为电信号。
接收器接收到反射信号后,会将信号放大并进行处理。
它会分析信号的强度、频率、相位等参数,来判断信号所代表的信息。
通过比较发射时刻与接收到信号的时刻,可以计算出声波的传播时间,从而测量目标与声纳的距离。
除了距离信息,声纳还可以根据接收到的信号的频率变化来推断目标的速度。
如果目标在接收到声波时正在运动,声波的频率将会发生多普勒效应的变化,从而给出目标的速度信息。
综上所述,声纳的工作原理是通过发射声波,接收目标反射回来的声波信号,并根据声波的传播时间、强度和频率等参数来获取目标的位置、距离和速度等信息。
这种声波的发射、传播和反射过程是声纳技术实现目标探测和定位的基础。
声纳是什么工作原理的应用
声纳是什么工作原理的应用什么是声纳声纳(Sonar)是一种利用声波在水中传播的原理来进行测距、探测和通信的技术。
通过发射声波脉冲并接收其回波,声纳可以获取目标物体的位置、形态等信息。
声纳在海洋探测、水下导航、捕鱼、测量水深等领域有着广泛的应用。
下面将详细介绍声纳的工作原理及其应用。
声纳的工作原理声纳系统主要由发射器、接收器和设备控制系统三部分组成。
工作过程如下:1.发射器发射声波脉冲:声纳系统中的发射器会产生一系列高频声波脉冲。
这些声波脉冲往往以固定的频率和振幅进行发送。
声波脉冲通过压电晶体或电磁换能器转换成机械能后,进一步转化为声能并发射出去。
2.声波脉冲在介质中传播:发射出的声波脉冲在水中以声速传播,直到遇到目标物体或水下地形。
声波在水中传播的速度取决于水的密度和温度等因素。
3.回波被接收器接收:当声波脉冲碰撞到目标物体或水下地形时,一部分声波会被反射回来,形成回波。
接收器接收并转化回波信号,将其转化为电信号。
4.回波信号的处理和分析:接收器将接收到的回波信号传输给设备控制系统进行分析、处理和解码。
设备控制系统可以根据回波信号的强度、时间和频率等信息,计算出目标物体的位置、形态、运动状态等。
声纳的应用声纳技术在海洋、水下探测、通信和测量等领域有着广泛的应用。
海洋探测声纳技术在海洋探测中起着关键的作用。
通过声纳系统可以对海底地形、海洋生物和海洋环境进行精确测量和探测,有助于地质勘探、海底管线敷设、海洋资源调查等工作的开展。
此外,在海洋科学研究中,声纳技术也被广泛应用于鱼群数量估计、海底植被调查等方面。
水下导航声纳技术在水下导航及海底遥感中也发挥着重要作用。
通过声纳技术,可以实时获取水下地形、水下物体及水下障碍物的信息,为水下机器人、潜水员等提供准确的导航和障碍物避难的能力。
在水下勘探、水下考古、海底机器人等领域,声纳技术为相关研究和工作提供了有效的技术支持。
捕鱼声纳技术在捕鱼业中有着广泛的应用。
声纳的工作原理
声纳的工作原理
声纳是一种利用声波进行探测和测距的技术。
其工作原理基于声波在介质中传播时的特性,通过发射声波信号并接收回波信号来实现距离测量。
主要包括四个步骤:
1. 发射声波信号:声纳系统通过电源产生电信号,传给发射器,激活发射器内部的压电晶体。
压电晶体受到电信号的激励,会振动产生机械波——声波。
2. 传播和反射:发射器将声波信号释放到介质中,声波会沿着介质的传播路径向外扩散。
当声波遇到不同介质之间的界面或物体时,会发生反射、折射或透射。
3. 接收回波信号:声纳系统中的接收器会接收到回波信号,并将其转换成电信号。
接收器内部也有一个压电晶体,接收到回波信号后,晶体会产生电信号,反映了来自目标物体的声波信息。
4. 信号处理和测距:接收到的电信号经过放大和滤波等处理,以便提取出目标物体的相关信息。
通过测量回波信号的传播时间、回波的幅度和频率等参数,可以计算得到目标物体与声纳系统的距离、方向或形状等信息。
声纳系统可以通过不断地发射声波信号和接收回波信号,并利用计算机技术进行信号处理,实现对目标物体的探测和测距。
这项技术在海洋探测、潜艇导航、渔业资源调查等领域得到广泛应用。
声呐的工作原理是

声呐的工作原理是
声呐(Sonar)是一种利用声波来探测、定位和识别目标的设备。
它的工作原
理类似于蝙蝠利用超声波来定位猎物。
声呐系统通常由发射器、接收器和信号处理器组成,其工作原理主要包括声波的发射、传播、反射和接收几个步骤。
首先,声呐系统通过发射器产生一定频率的声波信号,然后将这些声波信号传
播到水中。
这些声波信号在水中以一定的速度传播,当遇到水中的目标时,部分声波会被目标反射回来。
接收器会接收到这些反射回来的声波信号,并将其转换成电信号。
接下来,信号处理器会对接收到的电信号进行处理和分析,通过计算声波的传
播时间和反射回来的信号强度,可以确定目标的距离和方向。
这样,声呐系统就能够实现对目标的探测和定位。
声呐的工作原理可以简单概括为“发射-传播-反射-接收-处理”,通过不断地
发射和接收声波信号,声呐系统可以实现对水下目标的高效探测和定位。
声呐广泛应用于海洋科学研究、海洋资源勘探、水下测绘、水下通信等领域,对于深海探测和水下作业具有重要意义。
总之,声呐是一种利用声波进行水下探测和定位的设备,其工作原理主要包括
声波的发射、传播、反射和接收等步骤。
通过对接收到的声波信号进行处理和分析,声呐系统可以实现对水下目标的精确探测和定位,具有广泛的应用前景和重要的实用价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
声纳工作原理的简易说明
声纳工作原理的简易说明
加拿大海军的M2S2声纳系统
声纳是一种非常重要的海军装备,随着潜艇等水下武器的使用而受到各国极大的重视。
这里,我们不去讨论某个具体的装备,也不涉及太多的数学概念,而是从简单的物理原理入手,对声纳这个水中顺风耳做个简略的介绍。
▲自然界中的雷达和声纳
目前的声纳主要分为两类,主动声纳和被动声纳。
主动声纳工作时类似雷达,更确切地说像蝙蝠,发出声波后,接受反射回来的声信号。
既然原理类似,问题来了,为何不把雷达直接搬到水下呢?很简单,雷达依赖的电磁波在水下衰减严重,根本不足以用于远距离的探测。
而声波是由物体振动产生,在水中的传播距离非常远,水中一声巨大的爆炸,上千公里远的地方也能听到。
如此得天独厚的优势,声波自然而然成为首选的媒介。
既然声响在水里可以传播很远,那么放置一个听音器静静地听着别人吼叫也能起到收集信息的作用,那么被动声纳就应用而生。
我们可以打个比方,某人冲着远处连绵不绝的大山高喊“我!爱!军!武!”,一段时间后
会有缥缈的回声传回来,“我~爱~军~武~”。
这样,嗓子和耳朵就组成了主动声纳,如果知道声音的传播速度,手头恰好有个秒表,简单的计算就能得到此人和大山之间的距离。
恭喜,这就是主动声纳技能。
如果此时在大山的另一边,有人恰好只是听到了这句喊,好吧,他只是用了被动声纳的技能。
了解了大概的工作原理后,我们的问题就具体起来,如何产生声波?如何接收声波?我们不可能在水下还是用嗓子喊耳朵听,所以特殊的部件被开发出来用于这个目的,那就是水声换能器。
这种部件的主要有两种类型,用磁场或是用电场都可以让物体变形,这里我们集中介绍用电场控制物体变形和振动的原理,即逆压电效应和压电效应。
在二战后期之前的声纳系统一直不太给力,原因之一就是有正逆压电效应的材料不靠谱,而纳粹潜艇威胁巨大,迫使盟军投入大量精力去开发新材料。
直到有一天,具有钙钛矿结构的钛酸钡(BaTiO3)被发现,使得声纳中的关键原件有了突破。
之后参杂有铅的铅锆钛(PZT)陶瓷被发明,其性能非常优异,经过改进后的材料至今仍然被某些声纳使用。
▲用于产生超声波的的压电
陶瓷阵列(PI公司,德国)
所谓的正逆压电效应就是力和电的相互转换。
当有外力F作用在压电体表面时,无论是拉伸还是压缩变形,都会在施加力的两个表面产生电荷。
利用这个原理,就可以制成传感器。
声波传播当中遇到这个传感器会引起传感器微小的振动,这种细微的变形会产生电荷信号。
结合其他电路和计算机,就可以制成听声器。
▲正压电效应示意图
那么逆压电效应就是由电场来控制物体的形变。
当压电体上下两端接好电线并且施加电压时,就会使物体沿着电场的方向伸长或是缩短。
如果把电场的加载速度变快,即频率加大,就能让该物体形变加快产生振动发出声波。
再加上其他的配套设备,就成了主动声纳的声源。
▲逆压电效应示意图
(以下这段话比较难理解,老师们看到勿笑,学有余力的学霸们请努力查资料理解,不感兴趣的同学们请自行忽略。
)在钛酸钡或是PZT 的晶体结构中,正负电荷中心位置重合,直到温度降低到某个值后正负电荷的中心不再重合就会产生偶极,这个偶极产生的现象带来了自发极化。
在陶瓷体中,自发极化取向相同的区域又会产生电畴,电畴在外电场下会翻转以保持和电场相同的方向。
在此期间,如果电畴转向的角度不是180度,那么这种转动就会带来陶瓷形状的改变即大电场下的应变,如果是交变电场,一个加载周期内就会出现回滞现象。
所以,实际应用中都是预先用大电场极化,让电畴向一个方向取向,之后就尽量不要改变电场的方向以免引起回滞和退极化现象。
当然某些电子存储设备除外。
言归正传,解决产生声波和接收声波的问题后,为了增强性能,声纳的单元一般都会做成阵列的形式,配合上其他的设备如移相器等等,实现对某个特定区域的扫描。
大型的阵列常见的有球形或是柱状,尺寸之大以致潜艇的鱼雷发射管都要让路。
军舰或是潜艇尾部由于有推进系统经常形成盲区,所以拖曳声纳远离舰尾的噪音区就应运而生。
▲光纤拖曳声呐概念图
▲布置于核潜艇的艇
首的综合声纳基阵
在现代的水下对抗中,使用主动声纳其实并不多,而被动式静默式的才是主流。
比如一个穿黑衣的夜行人,用手电筒固然对自己可以很方便,但是手电的灯光同样会暴露自己的位置。
为了做到全方位的探测,潜艇艇身左右两侧还有一系列的阵列。
当同一个信号分别被两个以上的阵列听到后,已知声波传播速度和两个阵列之间的距离的话,利用这个信号这两个阵列的时间差,就能解算出声波源头到接收装置的距离。
两个阵列之间布置越远,解算就越精确。
▲法国核潜艇使用的舷侧阵
▲潜艇的声纳布置示意
文末,我们还是来看看国外的达人们是如何自制一个主动声纳的。