【CN109960265A】一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法【专利】
区间二型模糊神经网络在SCR入口NO_x浓度软测量中的应用研究

区间二型模糊神经网络在SCR入口NO_x浓度软测量中的应用研究区间二型模糊神经网络在SCR入口NO_x浓度软测量中的应用研究摘要:选择合适的测量方法进行SCR入口NO_x浓度的软测量是实现高效能发电厂烟气净化控制的重要一环。
本文基于区间二型模糊神经网络(IT2FNN),通过对SCR入口NO_x浓度的建模分析与实验研究,探讨了IT2FNN在SCR入口NO_x浓度软测量中的应用。
结果表明,IT2FNN具有较高的软测量精度和较强的鲁棒性,能够有效解决SCR入口NO_x浓度的软测量问题。
1. 引言燃煤发电厂的烟气净化控制对降低大气污染物排放具有重要意义。
选择合适的测量方法进行SCR入口NO_x浓度的软测量是保证烟气净化控制系统稳定运行的关键之一。
因此,开展区间二型模糊神经网络在SCR入口NO_x浓度软测量中的应用研究具有重要的实际意义。
2. 区间二型模糊神经网络简介区间二型模糊神经网络(IT2FNN)是基于模糊逻辑理论和神经网络技术相结合发展起来的新型软测量方法。
与传统的相关模型相比,IT2FNN能够对输入变量的不确定性进行更加准确的建模与描述,并具有更好的鲁棒性和适应性。
3. SCR入口NO_x浓度建模分析首先,对SCR入口NO_x浓度进行建模分析。
根据实验数据,将SCR入口NO_x浓度作为输出变量,考虑燃煤性质、过程温度等影响因素作为输入变量,建立了SCR入口NO_x浓度与输入变量之间的关系数学模型。
然后,通过对模型进行优化与训练,得到了一个较为精确的SCR入口NO_x浓度软测量模型。
4. IT2FNN的建模与训练在建立SCR入口NO_x浓度软测量模型的基础上,利用IT2FNN 对模型进行进一步的建模与训练。
首先,将输入变量、输出变量以及它们之间的关系进行模糊化处理,得到模糊变量和模糊规则集。
然后,基于神经网络的算法,对模糊规则集进行训练和优化,得到最终的IT2FNN模型。
5. 实验研究与结果分析通过实验研究,验证了IT2FNN在SCR入口NO_x浓度软测量中的应用效果。
基于区间二型模糊PID的四旋翼无人机姿态控制

基于区间二型模糊PID的四旋翼无人机姿态控制
吴彪;院老虎;李威
【期刊名称】《控制工程》
【年(卷),期】2024(31)4
【摘要】针对传统PID控制与一型模糊控制在四旋翼无人机姿态控制中响应速度慢、超调量大等问题,提出了一种区间二型模糊控制与传统PID控制相结合的控制算法。
首先,在一型模糊系统的基础上对系统的单值前件和后件进一步模糊化形成区间前件和后件,更适于处理模糊信息。
其次,利用具有停止条件的改进迭代算法(enhanced iterative algorithm with stop condition,EIASC)进行降型过程中开关点的计算,减少了计算时间,并将求解出的参数变化量作为初始PID控制参数值的补偿。
最后,在建立的四旋翼无人机动力学模型上对所提算法进行仿真验证,仿真结果表明,所提算法比传统PID控制算法和一型模糊PID控制算法具有更快的响应速度、更高的稳态精度和更小的超调量。
【总页数】8页(P636-643)
【作者】吴彪;院老虎;李威
【作者单位】沈阳航空航天大学航空宇航学院
【正文语种】中文
【中图分类】TP391
【相关文献】
1.四旋翼无人机改进模糊PID姿态控制
2.基于模糊PID的多旋翼无人机姿态控制系统设计
3.基于模糊PID的四旋翼无人机飞行姿态控制方法研究
4.基于自耦PID 控制的四旋翼无人机姿态控制
5.基于模糊PID的四旋翼无人机飞行姿态控制
因版权原因,仅展示原文概要,查看原文内容请购买。
【CN109800762A】一种基于动态匹配因子的模糊车牌识别算法【专利】
模板库中各模板为:
其中
,
分别表示
点处待识别图像和模板图像的像素值,字符
有效区域像素值取值“1”,字符背景区域像素值取值“0”,得到匹配因子一 ,如公式(1)(2) (3):
其中, 统计模板图像 中识别像素点的个数; 为识别图像和第k个模板匹配的 匹配因子一 ,模板匹配的因子如公式1 ,选取识别图 像和Q个模板库中所有的 模板进行做与
(74)专利代理机构 北京八月瓜知识产权代理有 限公司 11543
代理人 马东瑞
(51)Int .Cl . G06K 9/34(2006 .01) G06K 9/40(2006 .01) G06K 9/46(2006 .01) G06K 9/62(2006 .01)
( 54 )发明 名称 一种基于动态匹配因子的模糊车牌识别算
2
CN 109800762 A
权 利 要 求 书
2/2 页
运算用
来表示,然后对
矩阵的每个像素点求和,计算出所有的匹配像素点个
数 ,然后除以 所有的 像素点个数计算出 和该模板的匹配因子 ;之 后计算出所有模板的匹配 因子 ,其中最大值就是识别图 像 和模板库中字符的匹配因子一 ,那 么对应的 该模板的 字符 就是待识别的车牌字符图像的值,识别出该字符;
技术领域 [0001] 本发明涉及车牌识别领域,尤其涉及一种基于动态匹配因子的分级分类相似字符 模糊车牌算法与相应的实现系统。
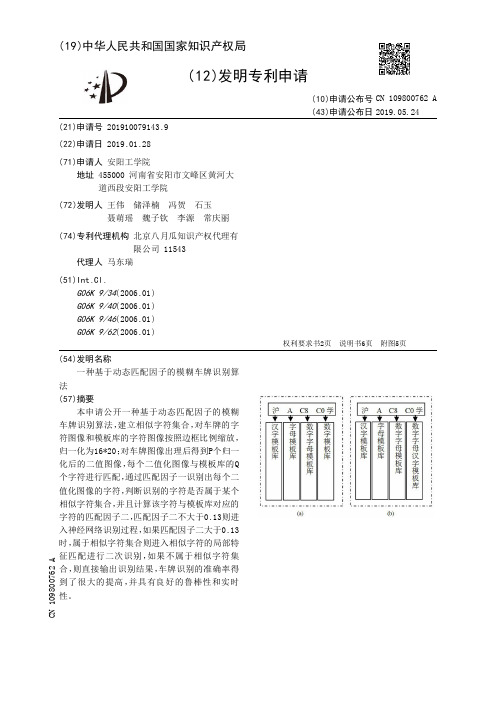
背景技术 [0002] 车牌识别技术产生于20世纪60年代,而真正引起研究人员的高度重视是在20世纪 80年代。当时 ,西方国家进入了高速发展的经济时代 ,由于车辆数量大幅 度提升 ,城市交通 问 题越来越严重 ,因此 引起了美国 及欧 洲很多国 家研究人 员的 重视 ,这些国 家开始大量投 入资金去建立一个智能交通系统 ,来缓解交通问 题带来的 一系列问 题。在西方发达国 家智 能交通系统的推动下,其他各个国家也纷纷建立适用于自己国家的智能交通系统。 [0003] 车牌识别的主要问题是如何提高识别准确率和识别速度。随着计算机软硬件的快 速发展 ,识别速度可以 得到很大的提高 ,但是识别准确率依然是一个存在的重大问题。影响 车牌识别准确与否的因素主要有三个,第一个是其所处环境条件,第二个是其车牌自身字 符组成形式相关,第三个是国内车况条件的影响。 [0004] 从车辆所处环境条件的角度来考虑,在全天候条件下,车辆图像背景的复杂、天气 的阴晴变化、光照的强弱变化、车辆的高速行驶等很多实际因素都会导致采集到的图像质 量不高,例如图像模糊、噪声干扰大等,这直接导致了识别系统识别率的低下。 [0005] 从车牌自身组成的角度来考虑,中国车牌由汉字、字母、阿拉伯数字三类字符混合 组成。其中 ,中国车牌中使 用到的汉字较多 ,并且笔划也比 较多 ,而汉字与字母、阿拉 伯数字 的 识 别非常不一 样 ,这不 仅增大了字符 识 别的 复 杂度 ,也会导致识 别系统 识 别率 低下。另 外 ,国内标准车牌针对不同车型和不 用用途规定了多种车牌格式 ,例如军 用车、警车、驾校 车辆、普通车辆、大型公共汽车等的 牌照格式就各具特色。因此 ,找到一 种可以 准 确并且高 效的 识别方法就更 加困难。基于上述的 这些现状 ,提出了基于分级分类的 相似车牌字符识 别算法。 [0006] 本申请的一种基于动态匹配因子的模糊车牌识别算法,首先建立相似字符集合, 对车牌的字符图像和模板库的字符图像按照边框比 例缩放 ,归一化为16*20 ;对车牌图像出 理 后得到P个归一化后的 二值图 像 ,每个二值化图 像与模板库的 Q个字符进行匹配 ,通过匹 配因子一识别出每个二值化图 像的 字符 ,判断 识别的 字符是否属于某个 相似字符集合 ,并 且计算该字符与模板库对应的字符的匹配因子二,匹配因子二不大于0 .13则进入神经网络 识别过程,如果匹配因子二大于0 .13,时,属于相似字符集合则进入相似字符的局部特征匹 配进行二次识别,如果不属于相似字符集合,则直接输出识别结果,车牌识别的准确率得到 了很大的提高,并具有良好的鲁棒性和实时性。
一种基于无人机与无人车的空地协同态势融合方法及系统[发明专利]
![一种基于无人机与无人车的空地协同态势融合方法及系统[发明专利]](https://img.taocdn.com/s3/m/e52c291c0166f5335a8102d276a20029bc646379.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202111137005.5(22)申请日 2021.09.27(71)申请人 航天时代飞鸿技术有限公司地址 102100 北京市延庆区中关村延庆园东环路2号楼149室(72)发明人 姜梁 吴国强 包文龙 孙浩惠 黄坤 高伟 (74)专利代理机构 北京金智普华知识产权代理有限公司 11401代理人 巴晓艳(51)Int.Cl.G06K 9/62(2022.01)G06V 10/80(2022.01)G06V 10/762(2022.01)(54)发明名称一种基于无人机与无人车的空地协同态势融合方法及系统(57)摘要本发明公开了一种基于无人机与无人车的空地协同态势融合方法及系统,属于图像处理、计算机视觉领域。
该方法包括将无人机集群和无人车集群协同侦察到的N个目标进行特征结构统一描述,生成N个目标特征向量;针对某一目标特征向量,在目标特征向量数据库中检索出已被侦察入库且与该目标特征向量近似的相似特征向量,该目标特征向量及其相似特征向量共同组成目标特征向量集;基于多特征频率权重以及多目标簇集质量聚类准则进行目标特征聚类,对该目标特征向量集进行聚类,实现空地协同态势融合。
本发明解决了基于无人机与无人车的空地协同态势融合系统的诸多问题。
权利要求书4页 说明书13页 附图1页CN 114065832 A 2022.02.18C N 114065832A1.一种基于无人机与无人车的空地协同态势融合方法,其特征在于,所述方法包括以下步骤:步骤1:通过目标特征描述结构将无人机集群和无人车集群协同侦察到的N个目标进行特征结构统一描述,生成N个目标特征向量,N为正整数;步骤2:针对某一目标特征向量,通过特征快速检索在目标特征向量数据库中检索出已被侦察入库且与该目标特征向量近似的相似特征向量,该目标特征向量及其相似特征向量共同组成目标特征向量集;步骤3:基于多特征频率权重以及多目标簇集质量聚类准则进行目标特征聚类,对该目标特征向量集进行聚类,实现空地协同态势融合。
区间二型T-S模糊系统反馈控制研究

区间二型T-S模糊系统反馈控制研究1. T-S模糊系统的基本原理和应用现状分析T-S(Takagi-Sugeno)模糊系统是一种常见的模糊控制方法,该方法可以将一个复杂的非线性系统分解为多个局部线性系统,并通过模糊规则进行整体控制。
本文将详细介绍T-S模糊系统的基本原理和应用现状,在分析基本原理时将重点关注T-S模糊控制器的建模方法和模糊控制规则的设计方法;在分析应用现状时将重点关注T-S模糊系统在工业、交通、航空等领域中的应用情况,并对各个领域中T-S模糊系统的优势和不足进行分析讨论。
2. 根据区间二型T-S模糊系统的特点设计反馈控制器区间二型T-S模糊系统是一种具有鲁棒性的模糊控制系统,该系统可以通过设计合适的反馈控制器实现对系统的控制。
本文将通过对区间二型T-S模糊系统的特点进行分析,提出合适的反馈控制器设计方法,包括基于Lyapunov理论的反馈控制器设计方法和基于滑动模式控制的反馈控制器设计方法。
对设计方法进行仿真实验验证其有效性,并对两种反馈控制器设计方法的优劣进行比较分析,最终得出最佳控制器设计方法并给出实际应用案例。
3. 基于道路交通流的区间二型T-S模糊系统控制研究道路交通流控制是一个复杂的非线性控制问题,在这个问题中,区间二型T-S模糊系统由于其针对非线性系统的鲁棒性被广泛应用。
本文将以道路交通流控制为应用场景,探究区间二型T-S模糊系统的控制方法和控制效果。
具体而言,本文将分析道路交通流模型的建立方法和分析方法,并讨论区间二型T-S 模糊系统的控制方法和控制效果,其中包括路段交通流控制和区域交通流控制两个方面。
最终,本文将结合实际应用场景,对区间二型T-S模糊系统在道路交通流控制上的价值进行评价和总结。
4. 基于区间二型T-S模糊系统的空调系统控制研究空调系统是一种多变量、非线性、时变的系统,传统的控制方法往往难以有效控制空调系统的稳定性和性能。
而区间二型T-S模糊系统由于其具有良好的鲁棒性和自适应性,在空调系统控制领域中得到了广泛应用。
基于二型模糊控制的无人艇航向航速控制系统设计与试验

本文网址:/cn/article/doi/10.19693/j.issn.1673-3185.03055期刊网址:引用格式:何姝, 熊颖郡, 肖玲君, 等. 基于二型模糊控制的无人艇航向航速控制系统设计与试验[J]. 中国舰船研究, 2024,19(1): 90–97.HE S, XIONG Y J, XIAO L J, et al. Design and experiment of heading and speed control system of unmanned surface vehicle based on Type-2 fuzzy control[J]. Chinese Journal of Ship Research, 2024, 19(1): 90–97 (in Chinese).基于二型模糊控制的无人艇航向航速控制系统设计与试验扫码阅读全文何姝1,熊颖郡1,肖玲君1,雷涛*2,朱曼21 深圳市宇驰检测技术股份有限公司,广东 深圳 5180552 武汉理工大学 智能交通系统研究中心,湖北 武汉 430063摘 要:[目的]针对水上复杂多变的环境给无人艇(USV )控制带来的不确定性干扰,提出基于二型模糊控制算法的USV 航向航速控制器,并运用所提算法研制一套智能自主稳健的控制系统。
[方法]构建USV 航向航速运动特性模型,利用递推最小二乘法(RLS )对航向航速运动特性模型进行参数辨识,基于辨识的航向航速运动特性模型分别设计二型模糊控制算法和滑模控制算法,并进行实艇验证试验。
[结果]结果表明,相较于滑模控制算法,二型模糊控制算法在控制USV 时表现出了较好的鲁棒性,具有较理想的抗干扰能力,但在实时响应方面略长。
[结论]研究结果可为在不确定干扰环境下的USV 运动控制提供参考。
关键词:无人艇;航向航速控制;递推最小二乘法;二型模糊控制中图分类号: U664.82文献标志码: ADOI :10.19693/j.issn.1673-3185.03055Design and experiment of heading and speed control system ofunmanned surface vehicle based on Type-2 fuzzy controlHE Shu 1, XIONG Yingjun 1, XIAO Lingjun 1, LEI Tao *2, ZHU Man21 Shenzhen Yuchi Testing Technology Co., Ltd., Shenzhen 518055, China2 Intelligent Transportation Systems Research Center, Wuhan University of Technology, Wuhan 430063, China Abstract : [Objective ]As the complicated and changing environment on the water imposes uncertain inter-ference on the control of unmanned surface vehicles (USVs), a heading and speed controller for USVs with a Type-2 fuzzy control algorithm is proposed. On this basis, an intelligent autonomous and robust control sys-tem is developed. [Methods ]First, a motion characteristic model for heading and speed is constructed. The recursive least square (RLS) method is then used to identify the parameters of the model. Finally, based on the identified model, a Type-2 fuzzy control algorithm and sliding mode control algorithm are designed and valid-ated through actual ship experiments.[Results ]As the experimental results indicate, compared with the slid-ing mode control algorithm, the Type-2 fuzzy control algorithm demonstrates better robustness and ideal anti-interference ability in controlling USVs, but its real-time response is slightly longer. [Conclusion ]The res-ults of this study can provide references for the motion control of USVs subjected to uncertain interference.Key words : unmanned surface vehicles ;heading and speed control ;recursive least squares method ;Type-2fuzzy control收稿日期: 2022–08–22 修回日期: 2023–01–03 网络首发时间: 2023–07–11 15:35基金项目: 湖北省揭榜制科技资助项目(2021BEC003); 国家自然科学基金资助项目(52001237);武汉理工大学三亚科教创新园开放基金资助项目(2021KF0030))作者简介: 何姝,女,1980年生,高级工程师。
【CN109993225A】一种基于无监督学习的空域复杂度分类方法及装置【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910248306.1(22)申请日 2019.03.29(71)申请人 北京航空航天大学地址 100191 北京市海淀区学院路37号(72)发明人 曹先彬 杜文博 朱熙 李碧月 李宇萌 (74)专利代理机构 北京科迪生专利代理有限责任公司 11251代理人 安丽 成金玉(51)Int.Cl.G06K 9/62(2006.01)(54)发明名称一种基于无监督学习的空域复杂度分类方法及装置(57)摘要本发明涉及一种基于无监督学习的空域复杂度分类方法和装置,属于空域态势评估分类技术领域,包括如下步骤:步骤一,收集待处理的空域态势样本集;步骤二,去偏差并标准化空域态势样本集;步骤三,对空域态势样本集进行PCA降维处理;步骤四,对低维度样本集进行k -Means聚类处理;步骤五,定义聚类后数据簇的复杂度类别。
装置包括:样本输入模块;特征提取模块;特征降维模块;原型比对模块;复杂度输出模块。
通过本发明进行空域复杂度的评估,不依赖于标定的先验知识,能够直接学习空域态势数据的内在特征及结构,使空域复杂度的分类具有可解释性,大大降低标定数据的人力和时间成本。
权利要求书2页 说明书6页 附图3页CN 109993225 A 2019.07.09C N 109993225A权 利 要 求 书1/2页CN 109993225 A1.一种基于无监督学习的空域复杂度分类方法,其特征在于,包括以下步骤:步骤一:收集待处理的空域态势样本集;步骤二:去偏差并标准化空域态势样本集;步骤三:对步骤二的空域态势样本集进行PCA降维处理,通过K邻近学习选择出降维维度,得到降维后的空域态势样本集;步骤四:对降维后的空域态势样本集进行k-Means聚类处理,得到聚类后的数据簇;步骤五:确定聚类后数据簇的复杂度类别,完成空域复杂度的分类。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910289235.X
(22)申请日 2019.04.11
(71)申请人 长沙理工大学
地址 410114 湖南省长沙市天心区万家丽
南路二段960号
(72)发明人 莫红 陈新超 赵宣茗 曾雅琼
李润泽
(51)Int.Cl.
G05D 1/02(2006.01)
(54)发明名称一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法(57)摘要本发明提出了一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法。
与传统方法不同,新的视觉引导方法通过使用区间二型模糊集合来描述人类驾驶员的视觉焦点,该方法应用模糊综合评价方法,为计算机选择合适的视觉焦点,建立一个适合人类驾驶的模糊视觉引导规则库。
该方法包括以下步骤:步骤1:收集视觉信息;步骤2:描述重要因素;步骤3:进行二型模糊综合评判;步骤4:建立模糊视觉引导规则库。
本发明的特点如下:更好地解决语言模糊和数据噪声问题,更大的自由度隶属函数;同时,它在处理系统中具有明显的优势不确定性,提高图像处理的效率和速度,
可以大大缩短响应时间和反应距离。
权利要求书2页 说明书5页 附图2页CN 109960265 A 2019.07.02
C N 109960265
A
1.一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法,其特征在于,包括以下步骤:
步骤1:收集视觉信息;
步骤2:描述重要因素;
步骤3:进行二型模糊综合评判;
步骤4:建立模糊视觉引导规则库。
2.根据权利要求1所述的一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法,其特征在于,步骤1中:
通过经验分析或眼动追踪,获得不同场景下人类驾驶员的视觉焦点信息。
眼睛跟踪是一种通过测量眼睛注视的位置或眼球相对于头部的运动来跟踪眼睛运动的方法。
通过测量眼睛的活动来了解人们关心的内容和人们忽视的内容,瞳孔对不同刺激的反应,保持焦点的时间以及搜索方式。
3.根据权利要求1所述的一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法,其特征在于,步骤2中:
用挡风玻璃为研究对象,以两个重要因素“横向长度”和“纵向长度”为影响视觉焦点选择的因素,为影响驾驶员视觉焦点选择的因素建立了相应的隶属函数。
4.根据权利要求1所述的一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法,其特征在于,步骤3中:
步骤3.1:确定评估对象的因素;
步骤3.2:建立评估对象的注释集;
步骤3.3:为每个因素建立权重集;
步骤3.4:通过评估单因素建立模糊综合评价矩阵;
步骤3.5:计算模糊综合评价矩阵;
步骤3.6:根据最大隶属度原则做出判断。
5.根据权利要求1所述的一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法,其特征在于,步骤4中:
根据所选因素,运用区间二型模糊集合对建立一个接近人类驾驶的模糊规则库包括以下步骤:
步骤4.1:在域的定义中Ωn,n∈{1,2,3},定义作为状态变量,即对无人驾驶车辆的视觉焦点的评估
步骤4.2:建立定义作为控制域的基础词;
步骤4.3:
建立定义作为控制域的基础词;
步骤4.4:根据驾驶经验和实际情况,采用模糊控制规则R1,R2和R3,并在Ωn,n∈{1,2,3}域上单独设置。
6.根据权利要求4所述的一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法,其特征在于,步骤4.1中是域的基础词Ωn。
7.根据权利要求4所述的一种基于区间二型模糊集合的无人驾驶车辆视觉引导方法,
权 利 要 求 书1/2页
2
CN 109960265 A。