永磁同步电机在低速下运行的研究
永磁同步电机低转速下电压利用率

永磁同步电机低转速下电压利用率
永磁同步电机(PMSM)是一种高效、节能的电机,广泛应用于
电动汽车、工业生产和家用电器等领域。
然而,在低转速运行时,PMSM的电压利用率会受到一定的限制,这给其性能和效率带来一定
的挑战。
在PMSM低转速运行时,由于电机的电磁特性和控制策略的限制,电压利用率会下降。
这意味着在低速运行时,PMSM可能无法充分利
用电源提供的电压,从而影响其输出功率和效率。
为了提高PMSM在低转速下的电压利用率,可以采取以下措施:
1. 优化电机设计,通过优化电机的磁路设计和绕组结构,可以
提高低速下的磁场分布均匀性,从而提高电压利用率。
2. 改进控制策略,采用先进的磁场定向控制(FOC)策略,可
以有效地调节电机的电流和磁场分布,提高低速下的电压利用率。
3. 使用多电平逆变器,多电平逆变器可以提供更高的输出电压
精度和波形质量,从而提高PMSM在低速下的电压利用率。
4. 考虑外部辅助设备,在某些特定应用场景下,可以考虑使用
外部辅助设备,如电容器、电感等,来提高PMSM在低速下的电压利
用率。
综上所述,提高PMSM在低转速下的电压利用率是提升其性能和
效率的关键。
通过优化设计、改进控制策略和使用适当的辅助设备,可以有效地提高PMSM在低速运行时的电压利用率,从而更好地满足
各种应用需求。
重复控制在永磁电机低速控制系统中的设计
重复控制在永磁电机低速控制系统中的设计摘要:随着电力电子技术、微电子技术、电机控制理论以及稀土永磁材料的快速发展,永磁同步电机(P M S M )得以迅速使用。
除了具有一般同步电机的工作特性以外,永磁同步电机还具有效率高、结构简单、转动惯量小、维修性好等特点。
因此,广泛应用于柔韧性制造系统、工业机器人、办公自动化、数控机床以及航空航天等领域。
由于永磁同步电机是一个非线性、多变量、强藕荷的系统,采用传统的 P I D 控制方法很容易受电机参数变化和负载扰动等不确定因素的影响。
为了提高控制系统的动态和静态特性,可以采用新型控制理论和智能控制理论代替 PID 控制,比如滑模控制、神经网络控制、模糊控制等。
本文将分析重复控制用于永磁电机低速控制系统中的设计。
关键词:重复控制;永磁电机;低速控制系统;设计原理Abstract:with the rapid development of power electronic technology, microelectronics technology, motor control theory and rare earth permanent magnet materials, the permanent magnet synchronous motor (P M S M) can be used quickly. In addition to the general characteristics of synchronous motor, permanent magnet synchronous motor has the advantages of high efficiency, simple structure, small inertia, good maintainability and so on. Therefore, it is widely used in flexible manufacturing systems,industrial robots, office automation, CNC machine tools and aerospace, etc.. Because of the permanent magnet synchronous motor is a nonlinear system, multivariable, strong coupling, using the traditional P I D control method is easily affected by motor parameter variations and load disturbances and other uncertain factors. In order to improve the dynamic and static characteristics of the control system, the new control theory and intelligent control theory can be used instead of PID control, such as sliding mode control, neural network control, fuzzy control and so on. In this paper, the repetitive control is used to design the low speed control system of permanent magnet motor.Key words: repetitive control; permanent magnet motor; low speed control system; design principle目录摘要 (I)关键词 (I)Abstract: (I)一、绪论 (1)(一)课题研究的背景及意义 (1)(二)永磁同步电机控制系统的国内外研究现状 (1)二、重复控制系统 (2)(二)重复控制发展现状 (2)(二)重复控制研究 (3)三、永磁同步电机低速控制系统 (4)四、重复控制在永磁电机低速控制系统中的设计 (5)(一)重复控制方法是通过内部模型作为基础而运行 (5)(二)仿真波形分析 (6)结论 (7)参考文献 (8)致谢 (9)一、绪论(一)课题研究的背景及意义一个国家的综合实力如何,可以通过观察其国家的航空航天事业的水平来确定。
低速永磁直线同步电机的分段设计研究

0 引 言
永磁 直 线 同步 电动 机 兼 有 直 线 电动 机 和永 磁 电
的应 用 场合 ,需 要 的永 磁 体 多 ,系统 整 体 的造 价 较
高 ;同时动子需要采用拖线供 电方式,运行过程中
易发 生 断 路 、漏 电 、短 路 等 故 障 。而 对 于 定 子 为 电
枢绕 组 ,动子 为永 磁 体 的单 段 式 结 构 ,即在 整 个 轨
mo e p r g a h t rman y,ito c d t e s ci n lp i c p e ,t e s c in lc i ro n o t o s e r a a r p smoo il n r du e h e to a rn i l h e t a rt i n a d h w o d e — o e to a p i ld sg tt a i i n lo tma e in a he s me tme.Th e tma c ewe n a tv ela d sa o sr aie e b s th b t e ci e c l n t tri e lz d,a d t e o n h p— tma e u ti bti e c o d n o t e a tfca g e i l r s l s o a n d a c r i g t h ri ilf ur . i i Ke r y wo ds:lw・p e o s e d;s c in lde in;p r a e tma n tln a y c r n u tr;o tmiai n d sg e t a sg o e m n n g e i e r s n h o o s moo pi z t ein o
( .T eC lg l tcl n ie i hn zo nvr t, hn zo 5 0 , hn ; 1 h o eeo Ee r a gne n i Z egh uU i sy Z egh u4 0 0 C ia l f ci E rg n ei 1
永磁同步电机变频调速控制方法研究

永磁同步电机变频调速控制方法研究第一章前言随着社会的发展,电机控制技术的研究和应用越来越受到关注。
永磁同步电机作为一种新型电机,具有高效、低噪音、小体积、高可靠性等优点,被广泛应用于新能源汽车、电动机车、风力发电以及工业自动控制等领域。
而变频调速控制技术则是电机驱动中的核心技术之一,可以改变电机输出的频率和电压,从而实现精准控制。
本文将着重研究永磁同步电机的变频调速控制方法,分别从控制系统结构、控制算法和实验验证三个方面进行探讨,旨在为永磁同步电机的实际应用提供参考。
第二章控制系统结构永磁同步电机的控制系统框图如下图所示:其中,电机控制器、变频器、传感器和计算机组成了整个控制系统。
电机控制器主要负责控制永磁同步电机的转速和电流,实现闭环控制;变频器则是将直流电源转换成交流电源,并可实现变换频率和电压的功能;而传感器主要用于测量电机的实际速度、位置以及转矩等信号,为电机控制提供反馈信号。
在永磁同步电机的控制系统中,最为关键的部分是电机控制器。
电机控制器可以采用矢量控制算法、直接转矢量控制算法、预测控制算法等不同控制算法进行实现。
其中,矢量控制算法具有控制精度高、响应速度快等优点,被广泛应用于永磁同步电机的控制中。
第三章控制算法3.1 矢量控制算法矢量控制算法是在永磁同步电机坐标系中进行控制的一种算法,其核心思想是将三相电压和电流通过变换矢量的方式,转换成两相电压和电流进行控制,从而实现在任意转速下永磁同步电机的控制。
具体来说,矢量控制算法是将永磁同步电机转换成dq坐标系,通过dq坐标系下的电压矢量和电流矢量,实现对电机的精确控制。
该算法不仅控制精度高,而且稳定性好,已经成为永磁同步电机控制中最为常用的方法。
3.2 直接转矩控制算法直接转矩控制算法又称为直接转矩控制算法,它也是在dq坐标系下进行控制的一种算法。
与矢量控制算法不同的是,直接转矩控制算法不需要进行矢量变换,通过直接控制dq坐标系下的电流,控制永磁同步电机的电磁转矩。
一种低压低速多支路永磁同步电动机设计
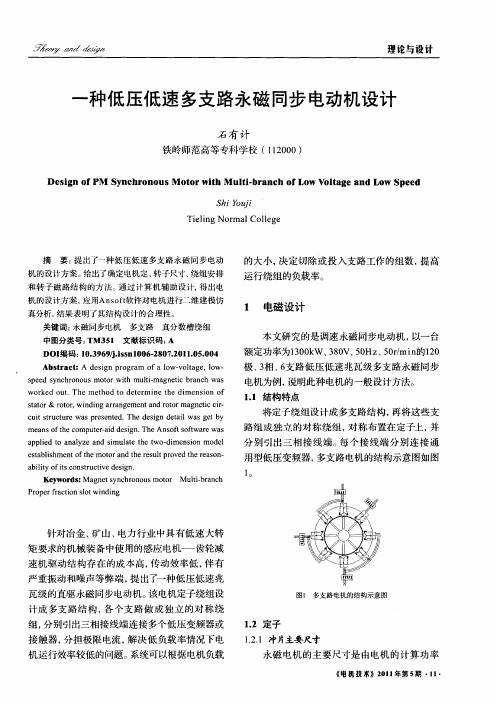
将定子绕组设计成多支路结构, 再将这些支
路组 成独 立的对 称绕组 , 对称布置在定子上, 并
me n f h o u e - i e in. h s f s f r s a so e c mp t rad d sg T eAn o t o t t wa ewa a p id t n l z n i lt h wo d me so d l p l o a a y e a d smu a e t e t — i n i n mo e e
极 、 相 、 支路低 压低速 兆瓦级多支路永磁 同步 3 6
电机为例 , 说明此种电机的一般设计方法。 11 结构特点 .
s e d s n h o o s mo o t l — a n t r n h wa p e y c r n u t r wi mu t m g e i b a c s h i c
《 电机 技术》2 1 年第 5 ・ l 01 期 l・
理论与设计
和 其 转 速 之 比或 汁 算 转 矩 来 决 定 的 。 功 率 和 对 转 速一定 的电机 , 其定 子冲片
永磁 电机 的定子槽数为2 8 又因电机体积较 8 槽。 大, 使用成型线 圈, 将 线圈的主绝缘需 要在下线 以前包扎好并进行浸烘处理 , 为了电机的嵌线方 便, 并保证其绝缘性能更加可靠 , 电机的槽型可 没计 为开u槽, 其槽型示意图如图3 。
S i oj h uf Y
Ti lng No m a e i r lCole e lg
摘 要 : 出了一种 低 压低 速 多支 路 永磁 同步 电动 提
机 的设计方 案 。 出了确定 电机 定 、 子尺寸、 给 转 绕组 安排 和 转 子磁 路结 构 的方 法。通过 计算 机辅 助 设计, 得出 电 机 的设 计方 案 , 用An o t 应 s f软件对电机进 行二维建 模仿
低速大转矩永磁同步电机及其控制系统共3篇

低速大转矩永磁同步电机及其控制系统共3篇低速大转矩永磁同步电机及其控制系统1低速大转矩永磁同步电机及其控制系统永磁同步电机是一种磁铁固定的电机,在工业生产中应用广泛。
低速大转矩永磁同步电机是其中一种,在许多应用场合广受欢迎。
本文将介绍低速大转矩永磁同步电机及其控制系统的工作原理、特点以及在不同领域的应用。
一、低速大转矩永磁同步电机的工作原理低速大转矩永磁同步电机是一种基于磁场共振原理来实现转矩输出的电机,其结构包括永磁体、定子和转子。
永磁体固定在定子上,输送直流电流产生轴向磁场,而定子上的绕组产生旋转磁场。
转子上的磁场与旋转磁场相互合作,使得转子受到的转矩最大化。
由于磁场共振效应,使得低速大转矩永磁同步电机在稳态运行时,能够产生更大的转矩输出,同时保持较高的效率。
二、低速大转矩永磁同步电机的特点1.具有高效率和高功率因数。
低速大转矩永磁同步电机的效率可以达到80%以上,功率因数可以接近1。
2.具有高精度和高性能。
低速大转矩永磁同步电机的转矩输出和转速能够实时控制,可以满足不同领域下的高性能和高精度要求。
3.工作稳定、可靠性高。
低速大转矩永磁同步电机适用于长期持续运转,并且不需要额外的机械结构来保证稳定性。
三、低速大转矩永磁同步电机的控制系统低速大转矩永磁同步电机的控制系统需要实现对转速、转矩和位置等参数的控制。
传统的控制方法包括PID控制、模型预测控制等,但是由于低速大转矩永磁同步电机的特殊性质,需要采用更加先进的控制方法。
现在广泛使用的控制方法有:磁场定向控制和磁场调制控制。
磁场定向控制是通过控制不同轴的磁场来实现对电机的转速和位置的控制。
磁场调制控制则是通过在电机不同部分施加不同频率的磁场以达到控制转速和转矩的效果。
四、低速大转矩永磁同步电机的应用由于其高效率、精度和稳定性,低速大转矩永磁同步电机在很多领域都得到了广泛应用。
在机床上,低速大转矩永磁同步电机可以带动机床的主轴,实现高精度和高速度的金属加工。
低速大转矩永磁同步电机及其控制系统的开题报告
低速大转矩永磁同步电机及其控制系统的开题报告一、研究背景和意义永磁同步电机是一种新型的电机,它具有高效率、高性能、高控制精度等优点,在现代工业中得到了广泛应用。
如今,随着电动汽车、风力发电等新兴产业的不断发展,永磁同步电机的应用领域也在不断扩大。
在永磁同步电机中,低速大转矩是其主要特点之一,可以满足发电机组和电动机等多种应用场景的需求。
同时,随着控制技术的不断发展和完善,对低速大转矩永磁同步电机的控制系统要求也越来越高,需要针对不同的应用场景进行优化设计。
因此,研究低速大转矩永磁同步电机及其控制系统,对于推动现代工业的发展,提高电机的工作效率和控制精度,具有重要的意义。
二、研究内容和方法本项目将从永磁同步电机的特性入手,深入研究其低速大转矩的机理和控制策略,主要研究内容包括:1. 永磁同步电机的工作原理及特性分析。
2. 低速大转矩永磁同步电机的运动学和动力学分析。
3. 基于电流矢量控制和空间矢量调制的永磁同步电机控制系统设计。
4. 根据实际应用需求,对控制系统进行优化设计。
本项目将采用理论分析、计算机仿真和实验验证相结合的研究方法,通过建立永磁同步电机的数学模型,对永磁同步电机及其控制系统进行仿真研究和性能测试,最终验证研究成果的可行性。
三、研究预期结果本项目的研究预期结果如下:1. 深入理解低速大转矩永磁同步电机的机理和特性,提高对其工作原理的认识和掌握程度。
2. 设计出一种基于电流矢量控制和空间矢量调制的永磁同步电机控制系统,实现对低速大转矩永磁同步电机的精确控制。
3. 对永磁同步电机控制系统进行优化设计,提高电机的工作效率和控制精度,满足不同应用场景的需求。
4. 通过仿真研究和实验测试,验证研究成果的可行性和有效性。
四、研究进度安排本项目的研究进度安排如下:阶段一:文献调研和理论分析。
时间安排为一个月。
阶段二:数学模型建立和仿真研究。
时间安排为两个月。
阶段三:控制系统设计和优化。
时间安排为两个月。
低速大扭矩永磁同步电机参数
低速大扭矩永磁同步电机参数永磁同步电机是一种具有高效率、高功率密度和高动态响应的电机,广泛应用于工业和交通领域。
而低速大扭矩永磁同步电机则在一些特定场合中发挥着重要的作用。
本文将围绕低速大扭矩永磁同步电机的参数进行讨论。
1. 额定功率(Rated Power)低速大扭矩永磁同步电机的额定功率是指在标准工况下,电机能够持续输出的功率。
通常以瓦特(W)或千瓦(kW)为单位表示。
额定功率的大小直接影响到电机的输出能力和使用范围。
2. 额定扭矩(Rated Torque)额定扭矩是指在额定工作条件下,电机能够持续输出的扭矩。
扭矩是电机转动时产生的力矩,通常以牛顿米(N·m)为单位表示。
低速大扭矩永磁同步电机的额定扭矩较大,能够提供较大的驱动力。
3. 额定转速(Rated Speed)低速大扭矩永磁同步电机的额定转速是指在额定工作条件下,电机转子的旋转速度。
转速通常以转每分钟(rpm)为单位表示。
低速大扭矩电机的额定转速较低,使其适用于低速工作场合。
4. 磁极数(Number of Poles)磁极数是指永磁同步电机转子上的磁极数量。
磁极数越多,电机的转速越低,扭矩越大。
低速大扭矩永磁同步电机通常具有较多的磁极数。
5. 线圈数(Number of Windings)线圈数是指电机的定子绕组中线圈的数量。
线圈数的选择直接影响到电机的输出特性。
低速大扭矩永磁同步电机通常采用较多的线圈数,以提供更大的输出扭矩。
6. 磁体材料(Magnet Material)低速大扭矩永磁同步电机通常采用高性能的永磁材料作为磁体,如钕铁硼(NdFeB)或钴硼磁钢(SmCo)。
这些磁体材料具有高磁能积和良好的磁化特性,能够提供强大的磁场,从而实现高效率和高扭矩输出。
7. 控制方式(Control Mode)低速大扭矩永磁同步电机可以采用不同的控制方式,如矢量控制、直接转矩控制等。
这些控制方式能够实现电机的精确控制和高效运行。
基于高频方波信号注入的PMSM无传感器低速运行研究
基于高频方波信号注入的PMSM无传感器低速运行研究王莉娜;郝强【摘要】目前,永磁同步电机(PMSM)无位置传感器运行研究受到广泛关注.采用一种基于高频方波信号注入的方法实现PMSM无位置传感器启动以及低速运行.首先详细分析了高频方波信号注入检测原理,然后对注入的高频方波信号以及电流采样模式进行了改进.向估计的两相旋转坐标系注入高频方波电压信号,根据检测到的定子电流并结合注入的电压信号即可获得转子位置,并且利用电机的磁路饱和特性,实现转子初始位置检测.所提出的改进方法不依赖于准确的电机参数,信号处理过程简单易实现.仿真结果验证了该方法的正确性.【期刊名称】《电气传动》【年(卷),期】2015(045)006【总页数】6页(P20-25)【关键词】永磁同步电机;无传感器控制;高频方波注入;Luenberger观测器【作者】王莉娜;郝强【作者单位】北京航空航天大学自动化科学与电气工程学院,北京100191;北京航空航天大学自动化科学与电气工程学院,北京100191【正文语种】中文【中图分类】TM341与传统的PMSM控制策略相比,无位置传感器控制减少了机械式位置速度传感器,更能满足高可靠性、低成本以及高温高湿等恶劣环境运行等特殊要求[1],具有良好的发展前景,因而已经成为电机控制研究领域热点之一。
目前,PMSM无速度传感器低速运行控制算法主要是基于高频信号注入检测法[2]。
该方法不依赖于电机参数,适合于电机无速度传感器低速运行。
传统的高频信号注入法,向电机定子绕组中注入高频正弦信号,通过检测定子电流中的高频信号成分获取转子位置信息[3]。
这种方法信号处理过程复杂,对硬件电路要求较高,并且需要使用滤波器,会带来时间延迟和幅值畸变,工程实现复杂。
为了解决这一问题,文献[4]提出了用高频方波信号代替高频正弦信号注入到电机中,并给出了几种可以注入的方波类型。
这种注入方法无需对高频电流响应进行解调和滤波,很大程度上简化了信号处理过程。
永磁同步电机低速区无位置传感器控制技术研究
永磁同步电机低速区无位置传感器控制技术研究张磊;高春侠【摘要】针对传统无位置控制技术在低速区所存在的收敛性差、观测精度低等问题,进行了方案对比研究:采用高频注入式的无位置控制技术具有不依赖电机参数、可以结合矢量控制技术实现高性能调速的优点,但存在需要实现较为复杂的滤波器来进行信号辨识,同时所注入的高频信号会引起一定振动和噪声等问题。
与此相比,提出一种新型的开环式无位置控制技术,其原理简单、不需要复杂的控制算法、不依赖电机参数以及凸极效应,并实现负载转矩的自适应调节。
缺点是负载突变时存在转速振荡问题。
因此,低速区方案的合理选择,需要依据控制系统的低速性能要求以及系统成本。
%The comparative research on the problems of bad performance of convergence and low accuracy of sensorless control in standstill and near-zero speed region was carried on.Although,sensorless control with high fre-quency signal injection (HFSI) can be independent of parameters of motors and achieve high performance speed con-trol with vector control scheme,it depends on some complicated digital filters to achieve signal identification and also the high frequency signals injected in motors can arouse boring vibration and acoustic noise. In contrast,a novel open-loop sensorless control scheme was proposed with the advantagesof simple structure,without complicated filters,inde-pendent of parameters and salient effect and can also achieve self-regulation according to the load conditions. The disadvantage of open-loop control is the problem of speed oscillation with large transient load. For this reason,the selection ofcontrol scheme in near-zero speed region needs to be based on the consideration of performance require-ment and cost of control system.【期刊名称】《电气传动》【年(卷),期】2013(000)001【总页数】5页(P12-16)【关键词】无位置传感器控制;低速区;高频注入;数字滤波器;开环【作者】张磊;高春侠【作者单位】中国石油大学华东信息与控制工程学院,山东青岛 266580;中国石油大学华东信息与控制工程学院,山东青岛 266580【正文语种】中文【中图分类】TM3411 引言永磁同步电机,特别是内置式结构,具有很高的功率、转矩密度以及功率因数,在电动汽车、航空、航海等体积受限的工业领域获得较大的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
永磁同步电机在低速下运行的研究
摘要:永磁同步电机一般在高速运转时,转速平稳,波动小,但在低速运行时会产生很大转矩波动,本文以电梯中使用的永磁同步电机为例,详细介绍和分析了无齿轮低速永磁同步电动机(以下简称PMSM) 产生转矩波动的原因和消除转矩波动的种种对策。
关键词:低速永磁同步电动机;电梯;纹波转矩;齿槽转矩
电力电子技术、钕铁硼永磁材料,以及具有快速运算能力的信号处理器DSP 的发展,为永磁同步电动机带来新的契机。
现代电梯所用的低速无齿轮永磁同步电动机就是一种新的曳引技术。
转子上的位置传感器,实时给出转子位置信息,在专用变频器供电下,始终实时控制定子电流综合矢量在q 轴上,从而使PMSM获得与直流电动机一样优良的转矩特性。
为了获得准确的平层精度,电动机必须在极低的转速甚至接近零转速时,保持运转平稳,且振动小,噪声低。
低速平稳性是宽调速永磁同步电动机一个重要的技术指标,因此对电动机设计带来严格要求。
1.PMSM谐波转矩产生的原因
本设计是针对现代高性能电梯开展的,因此对电梯的平层精度、对乘客的舒适感、对减小驱动电机的振动和噪声,尤其对低速甚至在接近零转速时驱动电机运转的平稳性均有高的要求。
为此,必须尽可能减小转矩的脉动。
为产生恒定转矩,PMSM的感应电动势和电流应为正弦波。
但在实际电动机中,永磁转子的励磁磁场或定子绕组的空间分布都不是理想的正弦波,此外给定子供电的变频装置,虽已采用了快速电流跟踪控制技术,尽可能跟踪正弦波,但定子电流还不免含有高次谐波。
因感应电势和定子电流波形畸变所产生的谐波转矩称为纹波转矩。
而因定子齿槽的存在引起的脉动转矩,称为齿槽转矩。
以下分析上述两种谐波转矩产生的原因并讨论减小谐波转矩的措施。
1. 1 纹波转矩产生的原因
以下定量分析磁场定向控制PMSM的纹波转矩。
假定:
(1) 磁路不饱和,忽略交轴电枢反应的影响;
(2) 不考虑转子永磁钢和转子铁心的阻尼效应;
(3) 定子绕组三相对称,连接型式为Y型无中线,定子电流中不含3 次和3 次倍数的谐波,定子电流中亦不含偶次谐波。
可将A 相电流和感应电动势表达如下:
...)t 7(sin )t 5(sin )t (sin )t (17m 15m 11
m A
I I I
i
+++=
ωωω (1)
...)7sin()5sin()t 3(sin )t (sin )t (17
15
m 13m 11
m A
E
E E
e
+++
+=
t t E
m ωωωω(2)
式中:ω1 为基波角频率,稳态时,它是转子电角频率。
A 相的电磁功率为
...)6cos()4cos()2cos()()(16
14
12
A
e
++
+
+
=t t t t t P
P
P
P
i o
A ωωω (3)
同理,B 相和C 相的电磁功率为
...
)3
2
(6cos )32(4cos )32(2cos )()(161412
B
e
+-+-+-+=πππωωωt t t t t P P P
P i o
B (4)
...
)3
4(6cos )3
4(4cos )3
4(2cos )()(16
14
12
C C
e
+-
+
-
+
-
+=πππωωωt t t t t P
P
P
P i o
(5)
电磁转矩为
[]
)()()()()()(1T
em
t t t t t t i e i e i e
C C B B A A
++Ω
=
(6)
式中:Ω是转子的机械角速度。
将式(2) ~ (5) 代入式(6) 得
...)18cos()12cos()6cos()(11811216em
T
++++=t t t t T T T T e ωωω
(7)
式中:
写成矩阵形式,有
从上述分析可见,次数相同的感应电动势谐波和电流谐波相互作用产生平均转矩,不同次数谐波电动势和电流间相互作用将产生脉动频率为基波频率6 倍次的纹波转矩,各纹波转矩的幅值与感应电动势和电流的波形畸变程度有关。
图1 形象地说明在给定感应电动势和电流波形下,产生纹波转矩的情况。
图1 波纹转矩的产生
当系统运行在高速区,或采用外转子方案时,纹波转矩可能被转子惯量所吸收。
但当电梯运行在极低的速度,它会使转子速度发生波动,严重影响速度的稳定性,进而影响平层的精确度。
我们在设计时,应充分重视,尽量减少纹波转矩。
1. 2 齿槽转矩产生的原因
齿槽效应是由永磁钢与定子齿间作用力的切向分量所构成。
齿槽转矩会降低电梯平层精度,尤其在低速时更严重,它还会带来振动和噪声。
图2 展示了面装式PMSM 在一个极下的物理模型。
当转子旋转时,处于永磁体极中心线中间部分的定子齿与永磁体间的磁导几乎不变,因此这些定子齿周围的磁场也基本不变,而与永磁体的侧面A 和B 对应的由一个或两个定子齿所构成的一小段封闭区域内,磁导变化却很大,引起磁场储能变化,从而产生齿槽力矩。
因此产生齿槽转矩的区域主要在永磁体两侧的拐角处,而不是整个永磁体。
转子每转过一个齿距λ后,两侧产生的脉动转矩之和即构成了齿槽转矩,如图3 所示。
可以看出这是一个周期函数,其基波分量的波长等于定子齿距。
图2 面装式PMSM一个极下的物理模型
图3 齿槽转矩
2 减小谐波转矩的措施
2. 1 减小纹波转矩的措施
为了减小纹波转矩,则应该尽可能减小感应电动势和定子电流的谐波,我们在设计中采用了下列措施:
(1) 尽可能增大每极每相槽数q , 以削弱感应电动势的高次谐波。
因本次设计均系低速电机, 极数一般较多,为提高绕组占槽面积, 一般不易采用太多槽数,故我们采用了分数槽绕组,可提高等效的整数槽绕组每极每相槽数q′。
这一方面对削弱感应电动势的高次谐波是有利的;另一方面,由于采用分数槽绕组,每极下定子槽数不等,这对减小PMSM 的定位力矩也是有利的。
定位力矩是永磁电动机在绕组不通电时所呈现的特征,该力矩力图使电动机转子定位于某一位置。
定位力矩主要是由转子中的永磁体与定子开槽的相互影响而产生的。
(2) 定子绕组选择适合的短距比β,以削弱感应电动势和磁动势的谐波。
必要时还可以采用正弦绕组的设计。
(3) 应使定子电流尽可能逼近理想的正弦波。
目前的变频装置,均使定子电流快速跟踪正弦参考值,所以定子电流中低次谐波含量已不大,而是含有较高次的谐波分量,但次数愈高,其幅值愈低,由此而产生的高频转矩波动,极易被转子滤去。
(4) 尽可能选择合适的磁极形状与尺寸,从而使转子励磁磁场的波形尽可能按正弦分布。
2. 2 减小齿槽转矩的措施
为了减小齿槽转矩,本设计采用了下列措施:
(1) 在不影响定子嵌线的前提下,尽可能选择小的槽口宽度;或采用磁性槽楔,以降低定子槽开口引起的气隙磁导变化或采用无槽定子结构。
(2) 在不影响磁钢利用率的情况下,尽可能增大气隙的尺寸。
(3) 定子斜槽,斜一个齿距,可消除所有齿槽转矩谐波,而对基波影响不大。
但定子斜槽一般会影响导体占槽面积,从而使铜耗增大。
(4) 亦可采用转子磁极斜极的方式。
对于面装式的磁钢结构,可以直接采用磁钢扭斜的工艺。
而对于插入式的磁钢结构,因工艺因素,只能采用如图4 所示的磁极连续移位的斜极方式。
图4 磁极连续移位的斜极方式
优先选择面装式转子磁钢结构,相当增大了电机的等效气隙。
需特别提出的是, PMSM 的定位力矩常是影响PMSM停转时定位精度的主要原因,除上述采用分数槽的措施外,分析和经验证明,当永磁体的宽度为定子齿距整数倍时,可以有效地抑制齿槽转矩。
在工艺上提高铁心加工精度和注意选配磁性能一致性的永磁体,都可以有效地抑制PMSM的定位力矩。
3. 结论
根据上述设计思想,研制的9. 5kW低速PMSM,即便在1r/ min (相当电源频率f = 0. 167Hz) 时仍能平稳运行,且保持着优良的线性转矩特性,如图5 所示。
这种设计具有体积小、重量轻、效率高、功率因数高、转矩大、转矩脉动小、振动小、噪声小的优点,并使电梯平层精度显著提高。
图5 电动机的转矩- 电流的关系(1r/ min)
参考文献:
[1] 谭娃. 低速无齿轮永磁同步电动机系统在现代电梯中的应用[C] . 2000 年全国中小型电机学术年会论文集,2000.
[2] 金如麟. 现代交流调速系统在现代电梯中的应用[C] . 2000 年全国中小型电机学术年会论文集,2000 ,
[3] 唐任远. 现代永磁同步电机%理论与设计[M] . 北京:机械工业出版社,1998.
[4] 王成元. 矢量控制交流伺服驱动电动机[M] . 北京:机械工业出版社,1995.。