超声波模块说明
超声波模块原理
超声波模块原理
超声波模块是一种以超声波作为信号传输媒介,用于测距、检测物体存在性、区分物体性质等应用的一种电子器件。
其原理是利用超声波在空气中传播的速度和时间关系实现测距。
与红外线测距相比,超声波测距具有反应速度快、稳定性高、测距范围大等特点。
超声波模块是由一发射器和一个接收器组成的。
发射器发射超声波信号,经过空气中的传播,当遇到物体时,部分超声波被反射回来,被接收器接收。
接收器将接收到的信号经过一系列的处理,可以计算出物体到超声波模块的距离。
超声波模块主要由发射器、接收器和控制电路组成。
发射器是通过驱动电路产生高频电信号来驱动晶体振荡器工作,晶体振荡器输出高频电信号,由适当的放大电路把高频电信号变为高能量的电波(超声波),发射出去。
接收器接收到反射回来的超声波信号后,通过一系列的信号处理,将信号变为微弱的电信号,经过放大后由控制电路进行工作状态检测,从而确定物体与传感器之间的距离。
超声波传播速度在空气中大约为340米/秒,在不同介质中,超声波传播速度有所不同。
利用超声波的速度和时间关系计算出物体到超声波模块的距离,就可以实现测距、检测物体存在性、区分物体性质等应用。
HC-SR04超声波测距模块说明书

HC-SR04超声波测距模块◼产品概述HC-SR04是一款升级的超声波测距模块。
新增加UART,IIC及1-WIRE(单总线)功能,模式可以通过外围电阻设置。
2CM超小盲区,4M典型最远测距,2mA超低工作电流。
采用自研超声波测距解调芯片,使其外围更加简洁,工作电压更宽(2.8-5.5V)。
驱动采用扫频技术,减少探头本身一致性对灵敏度的影响。
内部40K驱动频率采用正温度补偿,切合探头中心频率的温度特性,减小温度影响。
外部晶振为外观兼容而放置的晶振,不起任何作用,不焊接晶振的模块价格更有优势。
◼实物图片◼主要特性⚫采用专业解调芯片⚫工作电压:2.8-5.5V⚫工作电流:2mA⚫支持GPIO,UART,IIC及1-WIRE多种接口模式,默认输出模式兼容HC-SR04⚫2CM盲区,4M典型最远测距⚫200mS周期⚫可配置各种颜色及加固型探头◼典型应用⚫玩具,机器人避障⚫液位,水位测量⚫坐姿检测⚫其它测距应用◼性能参数◼GPIO/UART/IIC/1-WIRE模式选择◼测量操作一:GPIO模式工作模式同HC-SR04。
外部MCU给模块Trig脚一个大于10uS的高电平脉冲;模块会给出一个与距离等比的高电平脉冲信号,可根据脉宽时间“T”算出:距离=T*C/2(C为声速)声速温度公式:c=(331.45+0.61t/℃)m•s-1(其中330.45是在0℃)0℃声速:330.45M/S20℃声速:342.62M/S40℃声速:354.85M/S0℃-40℃声速误差7左右。
实际应用,如果需要精确距离值,必需要考虑温度影响,做温度补偿。
如有需要,可关注我司带温补单芯片RCWL-9700。
二:UART模式UART模式波特率设置:9600N1命令返回值说明0XA0BYTE_HBYTE_MBYTE_L 输出距离为:((BYTE_H<<16)+(BYTE_M<<8)+BYTE_L)/1000单位mm0XF1公司及版本信息连接串口。
US100使用说明
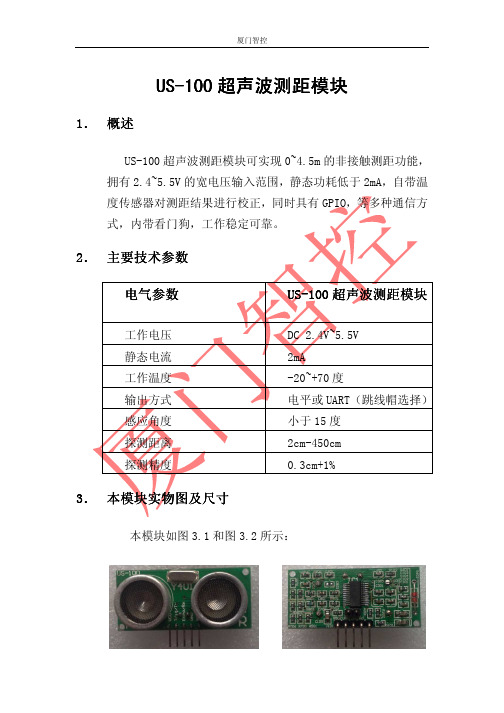
厦门智控USUS-100 超声波测距模块1. 概述US-100 超声波测距模块可实现 0~4.5m 的非接触测距功能, 拥有 2.4~5.5V 的宽电压输入范围,静态功耗低于 2mA,自带温 度传感器对测距结果进行校正,同时具有 GPIO,等多种通信方 式,内带看门狗,工作稳定可靠。
2. 主要技术参数 电气参数工作电压 静态电流 工作温度 输出方式 感应角度 探测距离 探测精度USUS-100 超声波测距模块DC 2.4V~5.5V 2mA -20~+70 度 电平或 UART(跳线帽选择) 小于 15 度 2cm-450cm 0.3cm+1%本模块实物图及 实物图及尺寸 3. 本模块实物图及尺寸本模块如图 3.1 和图 3.2 所示:厦门智控图 3.1: US-100 正面图图 3.2:US-100 背面图本模块的尺寸:45mm*20mm*1.6mm。
板上有两个半径为 1mm 的机械孔,如图 3.3 所示:图 3.3:US-100 尺寸图4. 接口说明5 Pin 接口为 2.54mm 间距的弯排针,如图 4.1 所示:厦门智控图 4.2:5 Pin 接口 从左到右依次编号 1,2,3,4,5。
它们的定义如下: 1 号 Pin:接 VCC 电源(供电范围 2.4V~5.5V)。
2 号 Pin:接外部电路的 Trig 端。
3 号 Pin:接外部电路的 Echo 端。
4 号 Pin:接外部电路的地。
5 号 Pin:接外部电路的地。
电平触发测距 测距工作原理 5. 电平触发测距工作原理电平触发测距的时序如图 5.1 所示:10US8 40K图 5.1:US-100 测距时序图厦门智控图 5.1 表明:只需要在 Trig 管脚输入一个 10US 以上的高 电平,系统便可发出 8 个 40KHZ 的超声波脉冲,然后检测回波 信号。
当检测到回波信号后,模块还要进行温度值的测量,然 后根据当前温度对测距结果进行校正,将校正后的结果通过 Echo 管脚输出。
超声波模块工作原理

超声波模块工作原理
超声波模块是一种常见的传感器模块,它利用超声波原理来实现测距、避障等功能。
在了解超声波模块的工作原理之前,我们首先需要了解一下超声波的基本概念。
超声波是一种频率高于人类听觉范围的声波,一般指频率大于20kHz的声波。
超声波在空气中传播时,具有很强的方向性和穿透力,因此被广泛应用于测距、医学成像、清洗等领域。
超声波模块通常由发射器和接收器两部分组成。
发射器会发出一系列超声波脉冲,然后接收器会接收到这些超声波并将其转化为电信号。
通过测量超声波从发射到接收所经历的时间,就可以计算出目标物体与超声波模块的距离。
超声波模块的工作原理可以简单概括为,发射器发送超声波脉冲,这些超声波脉冲在空气中传播,当遇到物体时会被反射回来,接收器接收到反射的超声波并将其转化为电信号,然后计算出距离。
在实际应用中,超声波模块通常会通过单片机或其他控制器来控制和处理。
当需要测距时,控制器会发送指令给超声波模块,然后接收超声波模块返回的距离数据,并进行相应的处理和判断。
超声波模块的测距精度受到多种因素的影响,包括超声波的频率、发射功率、接收灵敏度、环境因素等。
在使用超声波模块时,需要注意这些因素对测距精度的影响,并根据实际情况进行调整和补偿。
除了测距功能,超声波模块还可以用于避障。
通过测量超声波返回的时间和强度,可以判断物体与超声波模块的距离和方向,从而实现避障功能。
总的来说,超声波模块利用超声波原理实现测距、避障等功能,其工作原理简单清晰,易于掌握和应用。
在实际使用中,需要注意测距精度、环境因素等影响因素,以确保超声波模块的正常工作和准确测量。
dw580超声使用说明

dw580超声使用说明DW580超声是一种常用的超声波测距模块,具有测距范围广、精度高、功耗低等特点。
本文将详细介绍DW580超声的使用说明,帮助用户更好地了解和使用该设备。
一、DW580超声的基本介绍DW580超声是一种基于超声波原理的测距模块,可广泛应用于机器人导航、智能家居、智能车辆等领域。
它采用超声波传感器和控制电路组成,通过发射超声波脉冲并接收其回波,计算出物体与模块之间的距离。
二、DW580超声的主要特点1. 测距范围广:DW580超声的测距范围可达2cm-500cm,适用于不同场景的测距需求。
2. 精度高:该模块的测距精度可达±1cm,能够满足大部分应用场景的要求。
3. 功耗低:DW580超声的工作电流仅为2mA,节能环保,适合长时间使用。
4. 简单易用:该模块采用4针接口设计,方便用户与其他设备的连接和控制。
5. 多种工作模式:DW580超声支持单次测距模式和连续测距模式,可根据实际需求选择合适的模式。
三、DW580超声的使用方法1. 接线准备:将DW580超声的VCC引脚接到3.3V电源,GND 引脚接到地线,Trig引脚接到控制器的GPIO口,Echo引脚接到控制器的GPIO口。
2. 设置工作模式:根据实际需求,选择单次测距模式或连续测距模式。
在单次测距模式下,控制器发送一个脉冲信号给Trig引脚,超声波模块发射超声波并计算距离后,将结果通过Echo引脚返回给控制器。
在连续测距模式下,超声波模块会自动循环发送超声波并返回距离数据。
3. 数据处理:控制器接收到超声波模块返回的距离数据后,可以根据实际需求进行处理,如显示在屏幕上、存储到数据库中等。
4. 注意事项:(1) DW580超声的工作电压为3.3V,不可超过此电压范围,否则可能损坏模块。
(2) 超声波在传播过程中会受到物体的反射、折射等影响,可能会导致测距误差,因此需要在实际应用中进行校准。
(3) DW580超声的测距范围和精度与所使用的超声波传感器和控制电路有关,不同型号的模块具有不同的性能指标,请根据实际需求选择合适的型号。
US-100超声波测距模块在Arduino平台上的使用说明
unsigned int TrigPin = 3; //将 Arduino 的 Pin3 连接至 US-100 的 Trig/TX unsigned long Time_Echo_us = 0; unsigned long Len_mm = 0;
void setup() { //Initialize
如果先将 US-100 与 Arduino 连好,再给 Arduino 下载程序,在下载程序时会出错, 因为 US-100 与 Arduino 的通信和 Arduino 下载程序时使用的同一个串口,会相互干扰。
图 3.1:串口模式下 US‐100 与 Arduino 的连接
3.2 串口模式下测距使用例程
}
3.3 串口模式下测温使用例程
int Temperature45 = 0;
void setup() { //将 Arduino 的 RX 与 TX(Digital IO 0 和 1)分别于 US-100 的 Echo/Rx 和 Trig/Tx 相连,确保连接前已经使 US-100 处于串口模式。
Serial.begin(9600); //设置波特率为 9600bps. }
Serial.begin(9600); //测量结果将通过此串口输出至 PC 上的串口监视器 pinMode(EchoPin, INPUT);//设置 EchoPin 为输入模式。 pinMode(TrigPin, OUTPUT); //设置 TrigPin 为输出模式。 }
void loop()
{ //通过 Trig/Pin 发送脉冲,触发 US-100 测距
unsigned int HighLen = 0; unsigned int LowLen = 0; unsigned int Len_mm = 0; void setup() { //将 Arduino 的 RX 与 T(X Digital IO 0 和 1)分别于 US-100 的 Echo/Rx 和 Trig/Tx 相连,确保连接前已经使 US-100 处于串口模式。
KS103超声波测距模块说明书

工作电压:3.0V~5.5V 直流电源 工作时瞬间最大电流:10.6mA@5.0V, typical 工作电流:1.6-2.7 mA@5.0V, typical 休眠时最大耗电量:500uA@5.0V, typical (串口模式时不休眠) 功耗:使用纳瓦技术省电,5s 未收到 I2C 控制指令自动进入 uA 级休眠,并可随时被主机 I2C 控
位
I2C
(4)
数据。
Note 4: 这种总线钳制探测方式可以为客户获得更大的探测速度及效率,而不是通过定时器延时或 delay 函数延时每次探测都要至少等
待 65ms。换言之,用户大部分时候仅需要快速知晓 1m 范围内是否有障碍物。具体延时时间应大于表 1 所列各指令的最大探测时间。
如果不希望 SCL 线在探测时被拉低,可以通过发送指令 0xc3 指令,之后断电重启 KS101B/KS103/KS103S 后 SCL 线仍然不会拉低。如果想恢复 I2C 钳制及 SCL 拉低功能,发送
Note 1: 要达到最佳的工作状态推荐使用+5V 电源,低于 5V 的电压将影响测距量程。并且,严禁将 VCC 与 GND 接反,否则可能会
损坏电路。超过 3 秒钟的电路反接将可能导致不可恢复的损坏。
具体连线如下图所示(20 个):
VCC VCC
R1
R2
4.7K
4.7K
VCC SDA SCL GND
I2C 地址
寄存器 2
8 位数据指令
延时等待或查询 SCL
否
线是否为高?
3
是
接收 16 位 I2C 数据
多量程探测 探测指令从 0x01 到 0x2f,数值越大,信号增益越大。指令 0x01 对应量程约 100mm,0x02
超声波测距模块使用说明
超声波测距资料超声波测距模块连线:我们将超声波测距模块用红色,绿色两根导线引出,红色线(超声波测距模块电源脚)接5208K实验仪+5V,绿色线(超声波测距模块接地脚)接5208K实验仪GND.打开5208K实验仪电源, 超声波测距模块初始化显示27.将超声波发射接收头对准障碍物,数码管将显示超声波测距模块与障碍物之间的距离。
超声波测距学习板,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
超声波学习板采用AT89S51单片机晶振为12M,单片机用P1.0口输出超声波换能器所需的40K方波信号,利用外中断监测超声波接收电路输出的返回信号,显示电路采用简单的4位共阳LED数码管,段码驱动用74LS244集成电路,位码用S8550三极管驱动。
超声波测距的算法原理: 超声波在空气中传播速度为每秒钟340米(15℃时)。
X2是声波返回的时刻,X1是声波发声的时刻,X2-X1得出的是一个时间差的绝对值,假定X2-X1=0.03S,则距离为340mx0.03S=10.2米。
这就是超声波探头到反射物体之间的距离。
产品性能特点:成品板上自带:超声波收发传感器、接收放大电路、四位LED数码显示、四位按键(四个按钮和蜂鸣器属于功能预留,程序中无定义),电源部分自带整流、滤波、稳压电路,允许交流7~15V或者直流9~16V输入,经过实际测试,测量范围可达27~250厘米,测量精度为1厘米。
下图是超声波测距学习板的元件布局图,以下是部分汇编源程序;/////////////////////////////////////////////////////// ; USE BY :超声波测距器; IC :AT89C51; TEL :; OSCCAL :XT (12M); display :共阳LED显示;/////////////////////////////////////////////////////// ;测距范围7CM-11M,堆栈在4FH以上,20H用于标志;显示缓冲单元在40H-43H,使用内存44H、45H、46H用于计算距离;VOUT EQU P1.0 ; 红外脉冲输出端口speak equ p1.1;********************************************;* 中断入口程序 *;********************************************;ORG 0000HLJMP STARTORG 0003HLJMP PINT0ORG 000BHretiORG 0013HRETIORG 001BHLJMP INTT1ORG 0023HRETIORG 002BHRETI;;********************************************;* 主程序 *;********************************************;START: MOV SP,#4FHMOV R0,#40H ;40H-43H为显示数据存放单元(40H为最高位)MOV R7,#0BHCLEARDISP: MOV @R0,#00HDJNZ R7,CLEARDISPMOV 20H,#00HMOV TMOD,#11H ;T1为 T0为16位定时器MOV TH0,#00H ;65毫秒初值MOV TL0,#00HMOV TH1,#00HMOV TL1,#00HMOV P0,#0FFHMOV P1,#0FFHMOV P2,#0FFHMOV P3,#0FFHMOV R4,#04H ;超声波肪冲个数控制(为赋值的一半)SETB PX0SETB ET1SETB EASETB TR1 ;开启测距定时器start1: LCALL DISPLAYJNB 00H,START1 ;收到反射信号时标志位为1CLR EALCALL WORK ;计算距离子程序clr EAMOV R2,#32h;#64H ;测量间隔控制(约4*100=400MS)LOOP: LCALL DISPLAYDJNZ R2,LOOPCLR 00Hsetb et0mov th0,00hmov tl0,00hSETB TR1 ;重新开启测距定时器SETB EASJMP Start1;;**************************************************** ;* 中断程序* *;****************************************************;T1中断,发超声波用 ;T1中断,65毫秒中断一次INTT1: CLR EAclr ex0MOV TH0,#00HMOV TL0,#00HMOV TH1,#00HMOV TL1,#00HSETB ET0SETB EASETB TR0 ;启动计数器T0,用以计intt11:CPL VOUT ;40KHZnopnopnopnopnopnopnopnopnopDJNZ R4,intt11;超声波发送完毕,MOV R4,#04Hlcall delay_250 ;延时,避开发射的直达声波信号SETB EX0 ;开启接收回波中断RETIOUT: RETI;外中断0,收到回波时进入PINT0: nopjb p3.2,pint0_exitCLR TR0 ;关计数器CLR EA ;CLR EX0 ;MOV 44H,TL0 ;将计数值移入处理单元MOV 45H,TH0 ;mov th0,#00hmov tl0,#00hjnb p3.2,$SETB 00H ;接收成功标志pint0_exit:RETI;;****************************************************;* 显示程序 *;****************************************************; 40H为最高位,43H为最低位,先扫描高位DISPLAY: MOV R1,#40H;GMOV R5,#7fH;GPLAY: MOV A,R5MOV P0,#0FFHMOV P2,AMOV A,@R1MOV DPTR,#TABMOVC A,@A+DPTRMOV P0,ALCALL DL1MSINC R1MOV A,R5JNB ACC.4,ENDOUT;GRR AMOV R5,AAJMP PLAYENDOUT: MOV P2,#0FFHMOV P0,#0FFHRET;TAB: DB 18h, 7Bh, 2Ch, 29h, 4Bh, 89h, 88h, 3Bh, 08h, 09h,0ffh ;共阳段码表 "0" "1" "2" "3" "4" "5""6" "7" "8" "9" "不亮""A""-" ;;**************************************************** ;* 延时程序 *;**************************************************** ;DL1MS:push 06hpush 07hMOV R6,#14HDL1: MOV R7,#19HDL2: DJNZ R7,DL2DJNZ R6,DL1pop 07hpop 06hRET;;**************************************************** ;* 距离计算程序 (=计数值*17/1000cm) *;**************************************************** ;work: PUSH ACCPUSH PSWPUSH BMOV PSW, #18hMOV R3, 45HMOV R2, 44HMOV R1, #00DMOV R0, #17DLCALL MUL2BY2MOV R3, #03HMOV R2, #0E8HLCALL DIV4BY2LCALL DIV4BY2MOV 40H, R4MOV A,40HJNZ JJ0MOV 40H,#0AH ;最高位为零,不点亮JJ0: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #100DLCALL DIV4BY2MOV 41H, R4MOV A,41HJNZ JJ1MOV A,40H ;次高位为0,先看最高位是否为不亮SUBB A,#0AHJNZ JJ1MOV 41H,#0AH ;最高位不亮,次高位也不亮JJ1: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #10DLCALL DIV4BY2MOV 42H, R4MOV A,42HJNZ JJ2MOV A,41H ;次次高位为0,先看次高位是否为不亮SUBB A,#0AHJNZ JJ2MOV 42H,#0AH ;次高位不亮,次次高位也不亮JJ2: MOV 43H, R0POP BPOP PSWPOP ACCRET;;**************************************************** ;* 两字节无符号数乘法程序 *;**************************************************** ; R7R6R5R4 <= R3R2 * R1R0超声波专用发射接收头,有T字样的是发射头,标有R字样的是接收头.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.模块引脚
从左到右(见图)模块引脚分别为:VCC、trig(控制端)、echo(接收端)、out(空脚)、GND
2.主要技术参数:
1:使用电压:DC5V
2:静态电流:小于2mA
3:电平输出:高电平VCC-0.2V 低<0.2V
4:感应角度:不大于15 度
5:探测距离:0.02m-5m
6:探测精度:3mm
板上接线方式:VCC、trig(控制端)、echo(接收端)、out(空脚)、GND。
OUT 脚为防盗模块时的开关量输出脚,测距模块不用此脚!
3.使用方法:
(1)采用IO 触发测距,给TRIG 至少10us 的高电平信号(实际上25us 最佳); (2)模块自动发送8 个40khz 的方波,自动检测是否有信号返回;
(3)有信号通过ECHO 返回,ECHO 输出一高电平,高电平持续的时间就是超声波从发射到返回的时间.
本产品使用方法简单,用单片机IO 口控制TRIG 发一个10us以上(25us 最佳)的高电平,就可以在接收口(ECHO)等待高电平输出.当ECHO 从低变到高就可以开定时器计时,当ECHO 变为低电平时就可以读定时器的值,此时就为此次
测距的时间,据公式:测试距离=(高电平时间*声速(340m/s))/2,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了!。