北航线性系统理论完整版答案
《线性系统理论基础》第三章作业及答案

第三章作业及答案3.1 判断下列系统的能控性和能观测性。
2) []x y u x x 111,100041020122-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=解:2C 012000101Q bAbA b -⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦,2c rankQ n =<∴ 系统是状态不完全能控的2111101121o c Q cA cA -⎡⎤⎡⎤⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦,o 2rankQ n =<∴ 系统是状态不完全能观测的。
3.2 判断下列系统的能控性和能观测性。
1) []x y u x x 101,101300040002=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=2) x y u x x⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=01011000,1110000130000200001000113) []x y u x x 101,110200020012=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=4) x y u x x ⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=610321,029331100050005解:由系统能控和能观测性判据:1)A 为对角标准型,且对角元素互不相同,B 阵有全零元素的行,所以系统是不完全能控;C 阵中有全零元素的列,故系统是不完全能观测的。
2)1100100100000001A B C=0020011010000311⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦A 为约旦标准型,且各约旦块对角元素不相同,第一个约旦块最后一行对应到B 阵中的相应行为全零元素行,所以系统是不完全能控的;而各约旦块第一列对应到C 阵无全零元素列,所以系统是完全能观测的。
3)A =210020002⎡⎤-⎢⎥-⎢⎥⎢⎥-⎣⎦ B =011⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦C =[]101A 为约旦标准型,但两个约旦块元素相同,课本上给出的由标准型判定系统能控、能观测的定理不再适用,因此要采用能控性判别矩阵和能观测性判别矩阵来判断。
北航线性系统理论完整版答案
1-1 证明:由矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=12-n 1-n n- - - -1 0 1 0 00 0 1 0a a a a A可知A 的特征多项式为nn n n n n n n n n nn n n n a a a a a a a a a a a a a a a a a a a a a a a A I ++++++=+++++=+++=++=+=-+λλλλλλλλλλλλλλλλλλλλλλλ1-3-32-21-11-3-3122-2-1-n 13-n 2-n 21-1n 12-n 1-n 12-n 1-n n1- )1(-)1(- 00 0 1- )1(-)1(- 0 00 1-1 0 1- 0 00 1-若i λ是A 的特征值,则00 0 0 1 10 1- 0 0 0 1-111n 1-n i 12-n 1-n n =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=++++=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--ni n i n i i i i i a a a a a a a λλλλλλλλ 所以[]Ti i 1-n i 2 1 λλλ 是属于i λ的特征向量。
1-7 解:由于()ττ--t e t g =,,可知当τ<t 时,()0≠τ,t g ,所以系统不具有因果性。
又由于()()0 ,,ττ-=t g t g ,所以系统是时不变的。
1-8 解:容易验证该系统满足齐次性与可加性,所以此系统是线性的。
由于()()t 0 t ⎩⎨⎧>≤-=-=ααββαβαt u t u P u Q P 而()()⎩⎨⎧+>+≤-=⎩⎨⎧>≤=βαβαβααβαβ t 0 t t 0 t t u t u Q u P Q ,故u P Q u Q P αββα≠,所以系统是时变的。
又因为()()()()()⎩⎨⎧>≤=⎩⎨⎧>≤=ααααα,,T T t u t u P u P P T T min t 0 min t t 0 t 而()()()()()()()⎩⎨⎧>≤=⎩⎨⎧>≤=ααααα,,,,T T t u T T t u P u P P P T T T min t 0 min t min t 0 min t ,故()()u P P P u P P T T T αα=,所以系统具有因果性。
线性系统理论课后答案

6 XI 给定图P2.12)和<b)所示两个电路,试列写出其状态方S 和输出方程。
其中, 分别指定:⑹状态变组廿二叱•勺输入变M « = ef(r):输出支量尹=/(b)状态变宣组X 严气,输入变S“y(O;输出变量丿■“CP2 1解 本题A 于由物理系统養立状态令问描述的基本题,意在训练正磧和熟塚运用电 路定律列写岀电路的状态方程和输出方程•(1)列写P2・l(a)电路的状态方程和输山方程。
首先.考虎到电容C 和电感E 为给定 电路中仅有的两个储能元件•电容端电压弋和流经电感电流了构成此电路的线性无关极 人变*组,从而透取状态变*组州=%:和巧=i 符合定义要求。
基此,利用电路元件关 系式和回路基尔《夫定律,定出电路方程为C 虬r dr L —+= e再由上述电路方程导出状态变量陀和i 的导》项,可得到状态变査方程规范形式, 血C I •—=—(tU C d/ 1 心 1 d/L c L L表%=3山和dW/dn 并将上述方程组表为向量方程,就得到此电路的状态方程:继而.按约定输出y = A 可直接得到此电路的输出方程:(b)列写P2.i(b)电路的状态方程和«ta 方程•类似地.考虑到电容C ]和C2为给定电 路中仅有的两个储能元件,电容端电压乜和七构成此电路的线性无关极大变fi 组,选 取状态变量组二叱和可二叱2符合定义要求,基此,利用电路元件关系式和回路基尔 霍夫定定出电路方程为dur GRpM 叱+叱之71RZ,皿6再由上述电路方程导出状态变量叱和叱的导数项,可得到状态变量方程规范形式: % 1 I 1少GR q GR 5 C,Kdr 表M 也C| /曲和 MqI方程:继而,按约定输出y =坯,可由电路导出:尸叱=%+七 将其表为向*方程,就得萸i 此电路的皴出方程,八不叱~孫"6 +丽e并将上述方程组表为向量方程,就得封此电路的状态K2.6求出下列^输入输出描述的一个状态空同描述: (i) 施)二 2^2 十 18$+40u(s)『+ 6“ +11S+6 (ii) 型十妙⑴_u(j) (g + 3)2(zl)解本®属于由传递函数型输入输出描述导出狀态空间描述的基本fi 。
线性系统课后答案第2章
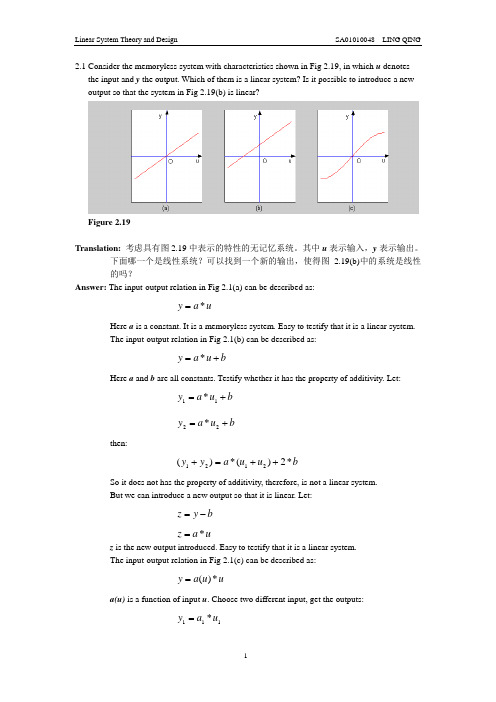
2.1 Consider the memoryless system with characteristics shown in Fig 2.19, in which u denotes the input and y the output. Which of them is a linear system? Is it possible to introduce a new output so that the system in Fig 2.19(b) is linear?Figure 2.19Translation: 考虑具有图2.19中表示的特性的无记忆系统。
其中u 表示输入,y 表示输出。
下面哪一个是线性系统?可以找到一个新的输出,使得图2.19(b)中的系统是线性的吗?Answer: The input-output relation in Fig 2.1(a) can be described as:u a y *=Here a is a constant. It is a memoryless system. Easy to testify that it is a linear system. The input-output relation in Fig 2.1(b) can be described as:b u a y +=*Here a and b are all constants. Testify whether it has the property of additivity. Let: b u a y +=11*b u a y +=22*then:b u u a y y *2)(*)(2121++=+So it does not has the property of additivity, therefore, is not a linear system.But we can introduce a new output so that it is linear. Let:b y z -=u a z *=z is the new output introduced. Easy to testify that it is a linear system.The input-output relation in Fig 2.1(c) can be described as:u u a y *)(=a(u) is a function of input u . Choose two different input, get the outputs:111*u a y =222*u a y =Assure:21a a ≠then:221121**)(u a u a y y +=+So it does not has the property of additivity, therefore, is not a linear system.2.2 The impulse response of an ideal lowpass filter is given by)(2)(2sin 2)(00t t t t t g --=ωωω for all t , where w and to are constants. Is the ideal lowpass filter causal? Is is possible to built the filter in the real world?Translation: 理想低通滤波器的冲激响应如式所示。
第一篇线性系统理论习题答案

9-7 设有三维状态方程
⎡0 ⎤ ⎢1 ⎥ ⎢ ⎥ ⎢ ⎣1 ⎥ ⎦
1 s + s +1 s 2 s + s +1
2
0
⎤ 0 ⎥ ⎥ ⎡0 ⎤ s 2 + 2 s 1⎥ = 3 0 ⎥ ⎢ ⎢ s −1 ⎥ ⎥ 1 ⎥ ⎢ ⎣1⎥ ⎦ s − 1⎥ ⎦
⎡ R M ⎤ ⎡ R −1 ∵⎢ ⎥×⎢ ⎣0 T ⎦ ⎣ 0
− R −1 MT −1 ⎤ ⎡ R −1 ⎥=⎢ T− ⎦ ⎣ 0
⎡R M ⎤ ∴⎢ ⎥ ⎣0 T ⎦
9-10 解
−1
⎡ R −1 =⎢ ⎣ 0
− R −1 MT −1 ⎤ ⎥ T −1 ⎦
−1
对可控标准形 A 和 b ,计算 ( sI − A) b
+
v2
& 2 = x1 + y = x1 − C 2 x
写成矩阵形式为
1 1 x2 + U R2 R2
图 9-1 RLC 网络
⎡ R1 − & x ⎡ 1 ⎤ ⎢ L1 ⎢x ⎥=⎢ ⎣ &2 ⎦ ⎢ 0 ⎢ ⎣
⎤ ⎡ 1 ⎤ 0 ⎥ x ⎡ ⎤ ⎢ L ⎥ ⎥ ⎢ 1 ⎥ + ⎢ 1 ⎥U − 1 ⎥ ⎣ x2 ⎦ ⎢ − 1 ⎥ ⎢ R2 C 2 ⎥ ⎦ ⎣ R2 C 2 ⎥ ⎦
x1 , x 2 有下列关系存在 x1 = x1 + x 2 x 2 = − x1 − 2 x 2
试求系统在 x 坐标中的状态方程。 解 ①
&1 = x & = x2 x &2 = & & = −2 x1 − 3 x 2 + u x x
《线性系统理论》作业参考答案

x 11 e t x 21 , 21 0 , x
x11 ( t 0 ) 1 x 21 ( t 0 ) 0
,
x 12 e t x 22 , 22 0 , x
x12 ( t 0 ) 0 x 22 ( t 0 ) 1
解得
x12 e t e t 0 x11 1 , x 21 0 x 21 1 1 (t ) x 0 e
( sI A )
1
s ( s 1) 0 2 det( sI A ) s ( s 1) 0 adj ( sI A ) 1
s 1 ( s 1) 0
2
s ( s 1) 1 s ( s 1) 1 s 1 1
2
所以 e
。
可以看出, f ( i ) 是 f ( A ) 的一个特征值。
1-3 解:(1) 特征多项式为 1 ( ) ( 1 ) .
4
验证
A 1 I 0 , ( A 1 I ) 2 0 , ( A 1 I ) 3 0 , ( A 1 I ) 4 0
At
e t 1 1 L [( sI A ) ] 0 0
e 1 1 0
t
t t 1 e te t e 1 。 t e
1-5 证明:因为 D 1 存在,所以由 D R p p
A det C B IA det D 0 BD A I D C
c
k 0
k
A
k
设 x 是属于 i 的一个非零特征向量,故
A x i x
.
2 2 因此 A x A Ax A i x i Ax i i x i x .
北航线性系统理论答案

2-17 证明:①首先证明()T T T B C A ,,是()s G 的不可简约实现(该题有问题,不是()TT TCB A,,)。
由于()s G 是对称传递函数阵,故有()()T T T C sI B B A sI C 1-1-A --=,所以()TT TBC A,,是()s G 的实现。
又因为()[]n CA CA Crank CA C A C rank n Tn TT T T =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=1-1- ,其可控; 同理可证其可观,故系统()T T T B C A ,,是可控可观的。
所以其是()s G 的不可简约实现。
②证明P 的对称性。
由题设易知,由于()T T T B C A ,,是()s G 的不可简约实现,则存在非奇异阵P ,使得TT T BCPC PB A PAP===--11,,。
由T T T T T T P P I P P P CP P B C C PB =⇒=⇒==⇒=--11 所以P 是非奇异对称阵。
③证明P 的唯一性。
由T C PB =,很容易知道1-=B C P T ,故知P 是唯一的。
综上可知,命题得证。
2-18 解:[]1 1 3- 4 2301 4 0 2- 3-0 3 2- 6-0 02 0 0 0 0 1 -=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=C B A 。
a.① ><B A |由[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==65 17 5 2 3 3 3 3 00 0 0 1 1 1 1 32B A B A AB B U 所以)53012301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<,span B A 。
② η()⇔⋂=kCAker η064 27 118- 145-16 9 34- 43-4 3 10- 13-1 1 3- 4 032=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⇔=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡x x CACA CA C故)12101301(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,span η ③ ><⋂B A |η即任意>⇔<⋂∈B A x |η2153012301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,同时有4312101301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=故0--1 1 5 22 3 3 31 0 0 00 1 1 14321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x x x x ,有)1301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂span B A η ④ ⊥><⋂B A |η 易知,⇔>∈<⊥B A x |[]065 17 5 2 3 3 3 3 0 0 0 0 1 1 1 1 32=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=T TxB A B A AB B x,即 065 3 0 117 3 0 15 3 0 12 3 0 1=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x 所以)0103-0010(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⊥,span B A 同③,可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⋂⊥0000|B A η⑤ ><⋂⊥B A |η)101-1-0123(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⊥,span η同③可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂⊥0000|B A η⑥ ⊥⊥><⋂B A |η易知)0123(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=><⋂⊥⊥span B A η 综上可知,上述空间的维数加起来不等于4,故在上述空间的直和空间中不能取到状态空间的基底。
线性系统理论习题答案

《线性系统理论》作业参考答案1-1 证明:由矩阵úúúúúúûùêêêêêêëé----=--121000001000010a a a a A n n nL M O M M M L L L则A 的特征多项式为nn n n n n n n n n n n n n n n n n na a a a a a a a a a a a a a a a a A I +++==+--++--=--++--=+--=--------+-----L L L M O MM ML LL L M O M M M L L L L M O MMM L L L112114322111321121)1()1(00001001)1()1(000010001000010001l l l l l l ll l l l l l l l l ll 若i l 是A 的特征值,则00001000010001)(1112121=úúúúúúûùêêêêêêëé+++=úúúúúúûùêêêêêêëéúúúúúúûùêêêêêêëé+--=-----n n i n i n i i i in n ni i i i i a a a a a a A I L M M L M O M M M L L L l l l l l l l l l u l 这表明[]Tn ii i121-l l l L 是i l 所对应的特征向量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1-1 证明:由矩阵 可知A 的特征多项式为nn n n n n n n n n nn n n n a a a a a a a a a a a a a a a a a a a a a a a A I ++++++=+++++=+++=++=+=-+λλλλλλλλλλλλλλλλλλλλλλλ1-3-32-21-11-3-3122-2-1-n 13-n 2-n 21-1n 12-n 1-n 12-n 1-n n1- )1(-)1(- 00 0 1- )1(-)1(- 0 00 1-1 0 1- 0 0 0 1-若i λ是A 的特征值,则所以[]Ti i 1-n i 2 1 λλλ 是属于i λ的特征向量。
1-7 解:由于()ττ--t e t g =,,可知当τ<t 时,()0≠τ,t g ,所以系统不具有因果性。
又由于()()0 ,,ττ-=t g t g ,所以系统是时不变的。
1-8 解:容易验证该系统满足齐次性与可加性,所以此系统是线性的。
由于()()t 0t ⎩⎨⎧>≤-=-=ααββαβαt u t u P u Q P 而()()⎩⎨⎧+>+≤-=⎩⎨⎧>≤=βαβαβααβαβ t 0 t t 0 t t u t u Q u P Q ,故u P Q u Q P αββα≠,所以系统是时变的。
又因为()()()()()⎩⎨⎧>≤=⎩⎨⎧>≤=ααααα,,T T t u t u P u P P T T min t 0 min t t 0 t 而()()()()()()()⎩⎨⎧>≤=⎩⎨⎧>≤=ααααα,,,,T T t u T T t u P u P P P T T T min t 0 min t min t 0 min t ,故()()u P P P u P P T T T αα=,所以系统具有因果性。
1-11 解:由题设可知,()τ-t g 随τ变化的图如下所示。
()τu 随τ变化的图如下所示。
从上述两图及所描述的系统,分析如下: 当2≥t ,21>-t 且22≤-t 即43≤<t 时,有()()()⎰⎰--+-=+--=-=22284212t tt t d t d u t g y τττττ; 当4>t 时,0=y ; 当32≤<t 时,有()()()10823222121121+-=+--++--++-=⎰⎰⎰---t t d t d t d t y t t t ττττττ; 当21≤<t 时,有()()()2423221111-+-=-++-++-=⎰⎰⎰--t t d t d t d t y tt t ττττττ; 当10≤<t 时,有()221t d t y t=+-=⎰ττ; 综上所示,该松弛系统在上述输入而激励的输出为: 1-15 解:由上述齐次方程,可得两线性无关的解向量为:⎩⎨⎧==-02111x e x t ,⎪⎩⎪⎨⎧==-t t e x e x 221221 所以⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-t t te e e x 021 即其基本矩阵为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-tt te ee 021 ψ;状态转移矩阵为:1-17 证明:由题设我们可知 故()[]()()[]()t T t T dtdt T t T dt d 111----=,得证。
1-19 证明:由题设可知:由上式可推出 ()()()()**⋅=t A t t t t 0101-,,φφ又由()()()00t t t A t t ,,φφ=⋅及习题1-17的结论可推出由以上两个结论,我们可得到()()()()10001-**==t t t t t t ,,,φφφ所以()()I t t t t =*001,,φφ得证。
即()()()()()()I t t t t t t t t t t t t ===***001010001,,,,,,φφφφφφ得证。
1-20 解:设其等价变换为Px x =-,则可知:由于P 是非奇异矩阵,所以⎰=⇒=+-⋅Adte P P PA 0。
1-24 解:易知()()()⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++=⎥⎦⎤⎢⎣⎡+=2s 9- 153s 1 115 00 100s s s G s G s G ,其中,其中()s G 0为严格真有理函数矩阵,进行下列计算:()()()()611632123+++=+++=s s s s s s s g ,则6g 11g 6g 3210====,,,r所以。
,,⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=9- 51136- 253 527- 302 6210G G G 因此,可得()s G 一个实现如下: 其模拟图如下所示。
1-25 证明:由题设知 同理可知()()()()()τδττδττ-+-=-+=-----∞=-----∑-t D B A C t k t D B eC t G k kk t A 0!1若要使得两系统零状态等价,则要满足()()ττ-=--t G t G ,即满足()-210 D D k B A C B CA k k===⇔--- ,,,得证。
2-2 解:a,x y u x x ⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=•1 2 1 1- 1 0 1 1-1 0 01 3- 4- 2- 1 0 0 0 1 0 由题设可知:[]315 1 7- 1 1 1-7- 1 1 1- 1 0 1 1- 10 0 1 B A AB B 2=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=rank rank ,所以系统可控;30 2 2 8- 14- 8-1- 3- 2-4 4 2 1 2 1 1- 10 2=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡rank CA CA C rank ,所以系统可观。
b,[]x c c c y u x x 0 1 1 0 0 1 1 0 0 0 1 0 0 1 1 321=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=•由题设可知:[]30 1 0 1 1 0 1 0 1 1 01 A B 2=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==rank B rank rankB ,所以系统可控; (1)若0321===c c c ,则系统不可观; (2)若321c c c ,,中至少有一个不等于零,则3 2 CA CA C 321132113212≠⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c c c c c c c c c c c rank rank ,所以系统不可观; 总之,该系统不可观。
d,[]x e y u e e x x ttt 1 2- 0 0 1- 2---•=⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡= 由题设知由于()()t B t t ,0φ的两行不是线性无关的,所以系统不可控; 又()[]()()()()[]3e - 1- 1-001-0t t t N dtdt A t N t N e t N =+==, 则()()23- 1- 1 --10=⎥⎥⎦⎤⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡t t e e rank t N t N rank ,所以系统可观。
2-3 证明:若线性系统可控,则存在01t t >使得()10t t W ,非奇异。
构造输入()()()()()()[]1100101-0-x t t t x t t W t t t B t u ,,,φφ**-=,其能在1t 时刻将状态()0t x 转移到()11x t x =。
我们将上式代入()()()()()()⎪⎭⎫ ⎝⎛+=⎰tt d u B t t x t t t x 0000ττττφφ,,,此时 ()()()()()()()()()()[]()()()()()()[]()()()1110011100101-100011100101-000011 -- --10x x t t t t x t t t x t t W t t W t x t t x t t t x t t W d t B B t t x t t t x t t ===⎪⎭⎫ ⎝⎛⋅=⎰**,,,,,,,,,,,φφφφφττφτττφφ命题得证。
对离散线性系统不一定成立。
对()()()n Bu n Ax n x +=+1,由递推可知: 要使所控状态任意,则必须满足若()0=n x ,而A 不满秩,则x 只在n A 值域中选取,否则x 属于[]BA AB B 1-n 的值域。
故对离散系统,任意状态控向任意状态的条件一般强于从任意状态控向原点的条件。
若A 满秩时,两者等价。
2-4 证明:若线性动态方程在0t 可控,则存在01t t >,使()()ττφB t ,0在[]10t t ,上行线性无关。
当0t t <时()()()()()ττφφττφB t t t B t ,,,00=,由于()τφ,t 为可逆阵,故不改变其线性无关性。
取t t t >>01,使得()()ττφB t ,0在[]10t t ,上行线性无关,而[][]110t t t t ,,⊂,所以()()ττφB t ,0在[]1t t ,上行线性无关,从而()()ττφB t ,在[]1t t ,上行线性无关,即对任意的0t t <,动态方程也可控。
在0t t >时,系统未必可控。
因为不能保证使()()ττφB t ,的行线性无关的区间存在。
2-7 证明: 必要性:反证法,当系统可控时,若[]n B A rank ≠ ,则存在0≠α,满足:[]000 ==⇒=B A B A ααα,,即这说明矩阵[]B A AB B n 1- 行线性相关,与线性时不变系统可控条件[]n B A AB B rank n =1- 矛盾,即命题得证。
充分性:对⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=111 00 1B A ,,我们可知[]21 1 010 1 =⎥⎦⎤⎢⎣⎡=rank B A rank ,但此时[]211 111 ≠=⎥⎦⎤⎢⎣⎡=rank AB B rank ,此时系统不可控,故不是充分条件。
2-8 解: 由题设易知:则()()()()()τττφφd Bu t x t t x t⎰+=000,,故()()()()()()ττπφττπφττπφπφππππππd Bu d Bu d Bu x x 3234234321322220022⎰⎰⎰+++=,,,,即()()()()()()()πτττττττττπππππ2 -cos -sin -cos -sin -cos -sin sin -cos 002343343221320=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎰⎰⎰t d u t t d u t t d u t t t t ()()⎪⎪⎩⎪⎪⎨⎧=⎪⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛+=⎪⎪⎭⎫⎝⎛⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛+⇔02-in -34-sin 34-in -32-sin 32-sin -sin sin -034-cos -2-cos 32-cos -34-cos cos -32-cos cos 321321ππππππππππt s t u t s t u t t u t t t u t t u t t u t 令π2=t 可知,⎪⎪⎩⎪⎪⎨⎧=+-=+-02332302323132131u u u u u ,此方程组有解,例如311=u ,02=u ,313-=u ,满足条件,所以存在常数1u 、2u 、3u ,是系统状态能完全由()()Tx 0 10=向()()Tx 0 02=π转换。