线性系统理论多年考题和答案
《信号与线性系统》试题与答案5

综合测试(三)一、选择题(本题共6小题,每小题3分,共18分)1、若想使连续时间信号在通过线性非时变系统传输时,波形不会产生失真,而仅仅是延时一段时间输出,则要求系统的单位冲激响应必须满足()A. B.C. D.2、序列和等于()A. 1B.C. D.3、连续时间信号的单边拉普拉斯变换为()A. B.C. D.4、下列各式中正确的是()A. B.C.D.5、单边Z变换对应的原时间序列为()A.B.C.D.6.请指出是下面哪一种运算的结果?()A . 左移6 B. 右移6 C . 左移2 D. 右移2三、描述某系统的微分方程为 y ”(t) + 4y ’(t) + 3y(t) = f(t) 求当f(t) = 2e -2t ,t ≥0;y(0)=2,y ’(0)= -1时的解;( 15分)解: (1) 特征方程为λ2 + 4λ+ 3 = 0 其特征根λ1= –1,λ2= –2。
齐次解为y h (t) = C 1e -t + C 2e-3t当f(t) = 2e –2 t时,其特解可设为y p (t) = Pe -2t将其代入微分方程得P*4*e -2t + 4(–2 Pe -2t ) + 3Pe -t = 2e -2t解得 P=2于是特解为 y p (t) =2e -t全解为: y(t) = y h (t) + y p (t) = C 1e -t + C 2e -3t + 2e -2t其中 待定常数C 1,C 2由初始条件确定。
y(0) = C 1+C 2+ 2 = 2,y ’(0) = –2C 1 –3C 2 –1= –1解得 C 1 = 1.5 ,C 2 = –1.5最后得全解 y(t) = 1.5e – t – 1.5e – 3t +2 e –2 t, t ≥0三、描述某系统的微分方程为 y ”(t) + 5y ’(t) + 6y(t) = f(t) 求当f(t) = 2e -t ,t ≥0;y(0)=2,y ’(0)= -1时的解;( 15分)解: (1) 特征方程为λ2 + 5λ+ 6 = 0 其特征根λ1= –2,λ2= –3。
(完整word版)《线性系统理论》试卷及答案
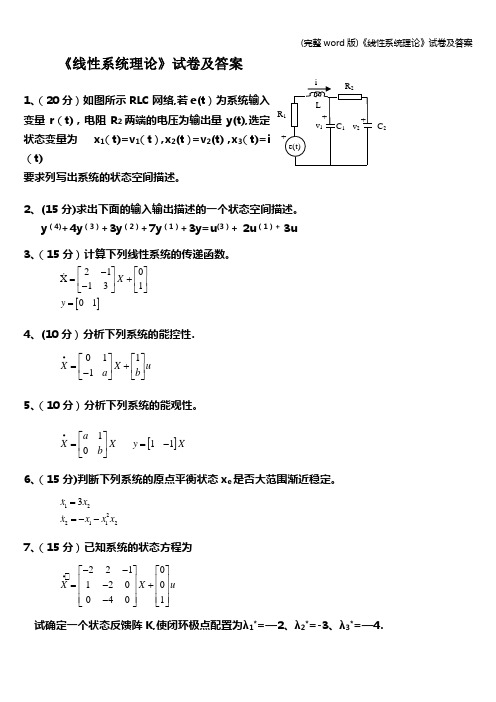
R C 2《线性系统理论》试卷及答案1、(20分)如图所示RLC 网络,若e(t )为系统输入变量r (t),电阻R 2两端的电压为输出量y(t),选定状态变量为 x 1(t)=v 1(t ),x 2(t )=v 2(t),x 3(t)=i (t)要求列写出系统的状态空间描述。
2、(15分)求出下面的输入输出描述的一个状态空间描述。
y (4)+4y (3)+3y (2)+7y (1)+3y=u (3)+ 2u (1)+ 3u3、(15分)计算下列线性系统的传递函数。
[]210X 13101X y -⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦=4、(10分)分析下列系统的能控性.0111X X u a b •⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦5、(10分)分析下列系统的能观性。
[]1110a X X y Xb •⎡⎤==-⎢⎥⎣⎦6、(15分)判断下列系统的原点平衡状态x e 是否大范围渐近稳定。
12221123x x x x x x==--7、(15分)已知系统的状态方程为221012000401X X u •--⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦试确定一个状态反馈阵K,使闭环极点配置为λ1*=—2、λ2*=-3、λ3*=—4.答案:1、(20分)如图所示RLC 网络,若e (t )为系统输入变量r (t ),电阻R 2两端的电压为输出量y (t ),选定状态变量为 x 1(t)=v 1(t),x 2(t )=v 2(t ),x 3(t)=i (t )要求列写出系统的状态空间描述。
2、(15分)求出下面的输入输出描述的一个状态空间描述。
列出向量表示形式解出解出解出r x x x L R x x x rx LR x x x xx x C R x x x C xC x r x R x L L LL⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--=-=+=+==++1321113211311132122222112211333113000xy x xLy (4)+4y (3)+3y (2)+7y (1)+3y=u (3)+ 2u (1)+ 3u[]得出了状态空间表达式列出向量表示形式,就求导,有选取状态变量令有令⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=++=⎪⎪⎩⎪⎪⎨⎧+----=========⎩⎨⎧++==++++++++=++++++===43211025233375y ~y ~x y ~x y ~...y ~x y ~x y ~3y ~2y ~y ~3y ~7y ~3y ~4y ~u 3734p 1y ~3734p 32p y d/dtp 4214321(4)43(2)22(1)1(3)4(1)21(1)(3)(1)(2)(3)(4)2342343x x x x x x x y u x x x x x x x x y u p p p u p p p p(完整word 版)《线性系统理论》试卷及答案3、(15分)计算下列线性系统的传递函数.[]Xy u X 10103112X =⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=[][][]计算得出传递函数⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-------=-=⎥⎦⎤⎢⎣⎡-------=⎥⎦⎤⎢⎣⎡--=--==⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--==⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=----1021131)3)(2(110)()(21131)3)(2(13112)()()(1010311210103112X 1111s s s s B A Is C s G s s s s s s A Is BA Is C s G CB A Xy u X(完整word 版)《线性系统理论》试卷及答案4、(10分)分析下列系统的能控性。
第一篇线性系统理论习题答案

9-7 设有三维状态方程
⎡0 ⎤ ⎢1 ⎥ ⎢ ⎥ ⎢ ⎣1 ⎥ ⎦
1 s + s +1 s 2 s + s +1
2
0
⎤ 0 ⎥ ⎥ ⎡0 ⎤ s 2 + 2 s 1⎥ = 3 0 ⎥ ⎢ ⎢ s −1 ⎥ ⎥ 1 ⎥ ⎢ ⎣1⎥ ⎦ s − 1⎥ ⎦
⎡ R M ⎤ ⎡ R −1 ∵⎢ ⎥×⎢ ⎣0 T ⎦ ⎣ 0
− R −1 MT −1 ⎤ ⎡ R −1 ⎥=⎢ T− ⎦ ⎣ 0
⎡R M ⎤ ∴⎢ ⎥ ⎣0 T ⎦
9-10 解
−1
⎡ R −1 =⎢ ⎣ 0
− R −1 MT −1 ⎤ ⎥ T −1 ⎦
−1
对可控标准形 A 和 b ,计算 ( sI − A) b
+
v2
& 2 = x1 + y = x1 − C 2 x
写成矩阵形式为
1 1 x2 + U R2 R2
图 9-1 RLC 网络
⎡ R1 − & x ⎡ 1 ⎤ ⎢ L1 ⎢x ⎥=⎢ ⎣ &2 ⎦ ⎢ 0 ⎢ ⎣
⎤ ⎡ 1 ⎤ 0 ⎥ x ⎡ ⎤ ⎢ L ⎥ ⎥ ⎢ 1 ⎥ + ⎢ 1 ⎥U − 1 ⎥ ⎣ x2 ⎦ ⎢ − 1 ⎥ ⎢ R2 C 2 ⎥ ⎦ ⎣ R2 C 2 ⎥ ⎦
x1 , x 2 有下列关系存在 x1 = x1 + x 2 x 2 = − x1 − 2 x 2
试求系统在 x 坐标中的状态方程。 解 ①
&1 = x & = x2 x &2 = & & = −2 x1 − 3 x 2 + u x x
《线性系统理论》作业参考答案6

可控可观,
>
5-9(2) 解:由题得系统的传递函数为
2 G (s) 0 s 3 1 1 0 2 1 0 1 s 1 0 1 s 1
1
0 1 0
2 0 s 5s 2 2 0 ( s s 1)( s 3 ) 2s 3 1 2 s s 1
注:本题也可以按照课本上介绍的方法做,答案不唯一。
注:本题也可以按照书上提供的第一种方法做。
-82 -40.5 128 62
( s5
2 2
d1 1 1 0 d2 1 1 0 经计算得 , E lim sG 1 ( s ) 1 1 E 2 lim sG 2 ( s ) 2 s 1 s
1 1 3 x 2 1 3 1 3 v 。 1 3
2 1 1 u Kx Hv E Fx E v 4
注:这只是其中一种方法,不唯一。 (3)在第二问的基础上做,由于 等于-1,-2, -3,即可配置。 5-11 本题中,系统有耦合,p+q -1=2+2-1=3<n=4,故不能用静态反馈来配置系统极点,本题 只能用设计动 态输出反 馈补偿器的 方法, 设 计一个一 维的动态输 出反馈补 偿器,使得 p+q+2l-1=5>4 式成立。对此五维系统,可增设一个需要配置的极点(如 -5 或-6)用待定系数 法解 K 的各参数。以上只是大体思路,本题计算繁琐且 K 阵不唯一。 ,故只需令以上三个根
1 1 E 为非奇异阵,所以系统可以用反馈解耦。 2 1
1
C1 A d 1 1 6 F d 2 1 C A 2 0
《线性系统理论》作业参考答案

x 11 e t x 21 , 21 0 , x
x11 ( t 0 ) 1 x 21 ( t 0 ) 0
,
x 12 e t x 22 , 22 0 , x
x12 ( t 0 ) 0 x 22 ( t 0 ) 1
解得
x12 e t e t 0 x11 1 , x 21 0 x 21 1 1 (t ) x 0 e
( sI A )
1
s ( s 1) 0 2 det( sI A ) s ( s 1) 0 adj ( sI A ) 1
s 1 ( s 1) 0
2
s ( s 1) 1 s ( s 1) 1 s 1 1
2
所以 e
。
可以看出, f ( i ) 是 f ( A ) 的一个特征值。
1-3 解:(1) 特征多项式为 1 ( ) ( 1 ) .
4
验证
A 1 I 0 , ( A 1 I ) 2 0 , ( A 1 I ) 3 0 , ( A 1 I ) 4 0
At
e t 1 1 L [( sI A ) ] 0 0
e 1 1 0
t
t t 1 e te t e 1 。 t e
1-5 证明:因为 D 1 存在,所以由 D R p p
A det C B IA det D 0 BD A I D C
c
k 0
k
A
k
设 x 是属于 i 的一个非零特征向量,故
A x i x
.
2 2 因此 A x A Ax A i x i Ax i i x i x .
北航线性系统理论答案

2-17 证明:①首先证明()T T T B C A ,,是()s G 的不可简约实现(该题有问题,不是()TT TCB A,,)。
由于()s G 是对称传递函数阵,故有()()T T T C sI B B A sI C 1-1-A --=,所以()TT TBC A,,是()s G 的实现。
又因为()[]n CA CA Crank CA C A C rank n Tn TT T T =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=1-1- ,其可控; 同理可证其可观,故系统()T T T B C A ,,是可控可观的。
所以其是()s G 的不可简约实现。
②证明P 的对称性。
由题设易知,由于()T T T B C A ,,是()s G 的不可简约实现,则存在非奇异阵P ,使得TT T BCPC PB A PAP===--11,,。
由T T T T T T P P I P P P CP P B C C PB =⇒=⇒==⇒=--11 所以P 是非奇异对称阵。
③证明P 的唯一性。
由T C PB =,很容易知道1-=B C P T ,故知P 是唯一的。
综上可知,命题得证。
2-18 解:[]1 1 3- 4 2301 4 0 2- 3-0 3 2- 6-0 02 0 0 0 0 1 -=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=C B A 。
a.① ><B A |由[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==65 17 5 2 3 3 3 3 00 0 0 1 1 1 1 32B A B A AB B U 所以)53012301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<,span B A 。
② η()⇔⋂=kCAker η064 27 118- 145-16 9 34- 43-4 3 10- 13-1 1 3- 4 032=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⇔=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡x x CACA CA C故)12101301(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,span η ③ ><⋂B A |η即任意>⇔<⋂∈B A x |η2153012301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,同时有4312101301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=故0--1 1 5 22 3 3 31 0 0 00 1 1 14321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x x x x ,有)1301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂span B A η ④ ⊥><⋂B A |η 易知,⇔>∈<⊥B A x |[]065 17 5 2 3 3 3 3 0 0 0 0 1 1 1 1 32=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=T TxB A B A AB B x,即 065 3 0 117 3 0 15 3 0 12 3 0 1=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x 所以)0103-0010(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⊥,span B A 同③,可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⋂⊥0000|B A η⑤ ><⋂⊥B A |η)101-1-0123(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⊥,span η同③可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂⊥0000|B A η⑥ ⊥⊥><⋂B A |η易知)0123(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=><⋂⊥⊥span B A η 综上可知,上述空间的维数加起来不等于4,故在上述空间的直和空间中不能取到状态空间的基底。
线性系统理论习题答案

《线性系统理论》作业参考答案1-1 证明:由矩阵úúúúúúûùêêêêêêëé----=--121000001000010a a a a A n n nL M O M M M L L L则A 的特征多项式为nn n n n n n n n n n n n n n n n n na a a a a a a a a a a a a a a a a A I +++==+--++--=--++--=+--=--------+-----L L L M O MM ML LL L M O M M M L L L L M O MMM L L L112114322111321121)1()1(00001001)1()1(000010001000010001l l l l l l ll l l l l l l l l ll 若i l 是A 的特征值,则00001000010001)(1112121=úúúúúúûùêêêêêêëé+++=úúúúúúûùêêêêêêëéúúúúúúûùêêêêêêëé+--=-----n n i n i n i i i in n ni i i i i a a a a a a A I L M M L M O M M M L L L l l l l l l l l l u l 这表明[]Tn ii i121-l l l L 是i l 所对应的特征向量。
《信号与线性系统》试卷A11(答案)

《信号与线性系统》试卷A(答案)(考试时间:2003年7月1日)队别 专业 学号 姓名一 填空(每空2分,共20分)1、线性系统是同时具有_齐次性__和___叠加性__的系统。
2、计算函数值:⎰-=+-222)34(dt t t δ_____1_______。
3、 一切脉冲信号的脉宽与频宽是成______反比_________变化的。
4、已知F(j ω)= -2ω2 , 则f (t)=_tsgnt_____。
5、信号无失真传输的条件是:(1)幅频特性为一常数;(2)相频特性为过原点的一条直线。
6、求e -2t ε(t-1) 的拉普拉斯变换为_e -(s+2)/(s+2)。
7、已知F(z)= 2Z 2-0.5Z Z 2-0.5Z-0.5 ,求原序列f(k)= ε(k)+(-0.5)k ε(k)。
8、已知f 1(k)={1,3,5,7},f 2(k)={1,2,1,2}, f 1(k)* f 2(k)={1,5,12,22,25,17,14}。
二、计算:(每小题8分,共16分) 1、已知系统的H(s)=2s+3s 4+7s 3+16s 2+12s=2s+3s(s+3)(s+2) 2,试画出系统的直接形式、级联形式的模拟图并判断系统是否稳定。
解:(1)直接形式的模拟图(2)级联形式的模拟图(3)因为系统的特征根为:λ1=0,λ2=-3,λ3=-2,所以系统临界稳定。
2、一离散时间系统用以下差分方程描写:y(k+2)-5y(k+1)+6y(k)=e(k+2)-3e(k),是求此系统的 单位函数响应h(k)。
解:由差分方程得到移序算子方程(S 2-5S+6)y(k)=(S 2-3) e(k)则转移算子为H(S)=S 2-3S 2-5S+6 =1 + 5S-9S 2-5S+6 =1 + 6S-3 - 1S-2则 h(k)=δ(k)+(2×3k -2k-1) ε(k-1)三、(10分)已知系统函数65)(2++-=ωωωωj j j H ,系统的初始状态y(0)=2,y ’(0)=1,激励f(t)= e -t ε(t)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2008级综合大题[]400102110010112x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦=&1 能否通过状态反馈设计将系统特征值配置到平面任意位置?2 控规范分解求上述方程的不可简约形式?3 求方程的传递函数;4 验证系统是否渐近稳定、BIBO 稳定、李氏稳定;(各种稳定之间的关系和判定方法!)5 可能通过状态反馈将不可简约方程特征值配置到-2,-3?若能,确定K ,若不能,请说明理由;6 能否为系统不可简约方程设计全阶状态观测器,使其特征值为-4,-5; 7画出不可简约方程带有状态观测器的状态反馈系统结构图。
参考解答: 1.判断能控性:能控矩阵21416124,() 2.000M BABA B rank M ⎡⎤⎢⎥⎡⎤==-=⎣⎦⎢⎥⎢⎥⎣⎦系统不完全可控,不能任意配置极点。
2按可控规范型分解取M 的前两列,并加1与其线性无关列构成1140120001P -⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦,求得1203311066001P ⎡⎤⎢⎥⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦进行变换[]1120831112,0,22260001A PAP B PB c cP --⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥=-====⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦所以系统不可简约实现为[]08112022x x u y x ⎧⎡⎤⎡⎤=+⎪⎢⎥⎢⎥⎨⎣⎦⎣⎦⎪=⎩&3.12(1)(1)2(1)()()(4)(2)(1)(4)(2)s s s G s c sI A B s s s s s --+-=-==-++-+4.det()(4)(2)(1)sI A s s s -=-++,系统有一极点4,位于复平面的右部,故不是渐近稳定。
12(1)()()(4)(2)s G s c sI A B s s --=-=-+,极点为4,-2,存在位于右半平面的极点,故系统不是BIBO 稳定。
系统发散,不是李氏稳定。
5.可以。
令11228,12Tk k k k A Bk k +⎡⎤⎡⎤=+=⎢⎥⎢⎥⎣⎦⎣⎦则特征方程[]2112()det ()(2)28f s sI A Bk s k s k k =-+=-++--期望特征方程*2()(2)(3)56f s s s s s =++=++比较上两式求得:728Tk -⎡⎤=⎢⎥-⎣⎦6.可以。
设12l L l ⎡⎤=⎢⎥⎣⎦,则11222821222l l A LC l l --⎡⎤-=⎢⎥--⎣⎦特征方程22121()(222)1628f s s l l s l l =+-++--期望特征方程*2()(4)(5)920f s s s s s =++=++比较得:103136L ⎡⎤⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦则:2043310733 A LC⎡⎤-⎢⎥-=⎢⎥⎢⎥--⎢⎥⎣⎦观测器方程为:204101333107013336x x u y⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤=++⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦&7.框图2007级线性系统理论试题及答案一、简述:1.线性性质:一个系统对任何输入1u和2u及任何实数1α和2α,均有()()()11221122H u u H u H uαααα+=+,称其为线性的。
2.松弛性:t时刻松弛:输出(),ty∞唯一地由(),tu∞所激励时,称系统在t时刻松弛。
3.时不变:一个系统的特性不随时间而变化。
4.串联系统:系统只有1个输入,第一个子系统输出作为第二个子系统的输入,第二个子系统的输出作为总的输出。
5.状态转移矩阵:令()tψ是()x A t x=&的任一基本矩阵,对(),-∞∞中的t,t称()()()100,t t t t-Φ=ψψ是()x A t x=&的状态转移矩阵。
二、101021x x u ⎛⎫⎛⎫=+ ⎪ ⎪⎝⎭⎝⎭& [12]y x = 1.验证能控、能观;2.是否稳定、渐近稳定,分别为什么;3.假设初始状态未知,能否找到一个()0,u +∞使y e =;4.()000x ⎛⎫= ⎪⎝⎭,求()y t 的单位阶跃响应,()1000t u t t ≥⎧=⎨<⎩;5.能否配置状态反馈使()2,3--是新的极点?若能,找出K ,若不能,说明理由; 6.设计全维观测器,使极点为()4,5--,画出结构图。
解:1.[]11212rank BAB rank ⎡⎤==⎢⎥⎣⎦,可控, 12214C rank rank CA ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦,可观; 2.系统为线性时不变的,故 稳定性与渐近稳定性等价。
令()det 0sI A -=,即()()120s s --=,所以特征值为11s =、22s =,不稳定,亦不渐近稳定;3.()()()00tA t At y t Ce x Ce Bud ττ-=+⎰[][]1022()020112121tt t t t x e e ud x e e τττ--⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎰()2210202t t t t e x e x e e u =+++-令()y t e =,由于10x ,20x 未知,u 无解,找不到;4.由3得:()()22220002000t t tttte e t y e e e e u t ⎧+-≥=⋅+⋅++-=⎨<⎩5.设[]12K k k =,121212k k A BK k k +⎡⎤+=⎢⎥+⎣⎦令()122121det 56det 2s k k sI A BK s s ks k ---⎡⎤-+=++=⎡⎤⎢⎥⎣⎦---⎣⎦解得:112k =,220k =-, 因此[]1220K =-6. 设[]12TL l l =,11221222l l A LC l l --⎡⎤-=⎢⎥--⎣⎦令()1122212det 920det 22s l l sI A LC s s l s l -+⎡⎤--=++=⎡⎤⎢⎥⎣⎦-+⎣⎦解得:130l =-,221l =,因此[]3021TL =-. (结构图 略)三、确定参数a 、b 的范围,使系统能控能观:1.11002100031a x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦& []001y x = 2.00100101111x x u a ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦& []01y b x = 3.使李氏稳定,74001100a x x ---⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦& 解:1.2014015139a a U BABA B -⎡⎤⎢⎥⎡⎤==-⎣⎦⎢⎥⎢⎥-⎣⎦,令3rankU =,得1a ≠- 22001003C V CA CA CA ⎡⎤⎡⎤⎢⎥⎢⎥==-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦,2rankV ≤,a 无解,所以 找不到合适的a 的范围使系统能控能观;2.20111112a a U BABA B a a a +⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥++⎣⎦,令3rankU =,得1a ≠2011120C b V CA b b b CA b b ⎡⎤⎡⎤⎢⎥⎢⎥==-+⎢⎥⎢⎥⎢⎥⎢⎥-+⎣⎦⎣⎦,令23det 0V b b =+≠,得0b ≠且1b ≠- 所以,当1a ≠,0b ≠且1b ≠-时,系统可控可观; 3.()32det 47sI A s as s -=++- ()320123a s a s a s a +++ 要让()det sI A -根小于0,有两种做法:①根据经验:21030j a a a a a >⎧⎨>⎩⇒07047a a >⎧⎪->⎨⎪>-⎩⇒a 无解②劳斯判据:321147477s s a a sa s ---令第一列元素均大于零,a 无解,因此肯定有一个正根 所以,该系统找不到合适的a 使系统李氏稳定。
四、1.()222332421s s s G S s s s +⎡⎤⎢⎥++=⎢⎥+⎢⎥⎢⎥++⎣⎦,实现若当标准型;解:()()202011111250121G s s s s -⎡⎤⎡⎤⎡⎤⎡⎤=+++⎢⎥⎢⎥⎢⎥⎢⎥-+++⎣⎦⎣⎦⎣⎦⎣⎦110001010021x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦& 02105201y x u -⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦注:①A 为若当标准型,B 为[]001001TLM L,C 为每个λ对应的[]N 按从高到低幂数排列,E 为直接传递部分(常数);②以上仅对单输入正确,多输入需分解N 为i i C B ⨯(满秩分解)。
2.按行展开,实现不可简约实现,大家看作业吧,这个题目看不清楚;3.002000012000125212001202x x u ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦&,实现可控标准型。
(可控标准型当然必然可控了,我擦) 解:2221212120002400122101221052220012BABA B b b Ab Ab A b A b ⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤==⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦L L L13u =,31u =,重排得12111120020012012520012P b Ab A b b -⎡⎤⎢⎥⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥⎣⎦求得1021111000.50000.25000.5P --⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥-⎣⎦取1P 的第三行(u1=3)为[]10.5000h =1P 的第四行为[]20.25000.5h =-计算1h 、1h A 、21h A 、2h ,得1122120.5000010000100.25000.5h h A P h A h ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦ 因此得122000010000101002P -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦所以12201000010********A P AP -⎡⎤⎢⎥⎢⎥==⎢⎥-⎢⎥⎣⎦,200001201B P B ⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦, 则可控标准型为:010000001000312612200001xx u ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦&五、100011001A -⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,100101B ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,100011C ⎡⎤=⎢⎥⎣⎦ 1.叙述并证明分离性原理;2.要用状态反馈将系统特征值配置到{}123---,并用降维观测器实现所需要的反馈。
解:1.组合系统:()ˆˆˆ,x Ax BKx Br xA LC BK x Ly Br y Cx =++⎧⎪⎨=-+++=⎪⎩&&即ˆˆx A BK x B r LC A LC BK x B x⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-+⎣⎦⎣⎦⎣⎦⎣⎦&& 作等价变换 0ˆPx I x x I I x ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦&&%14243 新的动态方程为:00x A BK BK x B r x A LC x +-⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦&&%%[]0x y C x ⎡⎤=⎢⎥⎣⎦%此系统闭环特征多项式与原系统相同,均为()()2det det det 0n n n A BKBK sI sI A BK sI A LC A LC ⎧+-⎫⎡⎤-=-+--⎡⎤⎡⎤⎨⎬⎢⎥⎣⎦⎣⎦-⎣⎦⎩⎭上式表明,状态反馈设计与估计器设计互不影响,分开进行;2.⑴设123456k k k K k k k ⎡⎤=⎢⎥⎣⎦1234564561111k k k A BK k k k k k k -+⎡⎤⎢⎥+=++⎢⎥⎢⎥+⎣⎦令()()()()det 123sI A BK s s s -+=+++⎡⎤⎣⎦解得(特解)12340k k k k ====,512k =-,65k =即0000125K ⎡⎤=⎢⎥-⎣⎦⑵取100011001C P R ⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦,则1100011001P -⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦所以1100011001A PAP --⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦,100201B PB ⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦,1100010C CP -⎡⎤==⎢⎥⎣⎦ 所以111001A -⎡⎤=⎢⎥⎣⎦,1201A ⎡⎤=⎢⎥⎣⎦,[]2100A =,211A = 11002B ⎡⎤=⎢⎥⎣⎦,[]201B =,11001C ⎡⎤=⎢⎥⎣⎦,200C ⎡⎤=⎢⎥⎣⎦ 令[]12L l l =,需观测的状态数为一阶,[]12Tu u u =,[]12Ty y y =()()()()22122121112212zA LA zB LB u A LA A LA L y ⎡⎤=-+-+-+-⎣⎦& ()()()2211221*********l z l u l u l l l y l y =--+-+--[]211210ˆI y y x P Q Q L I Ly z z -⎡⎤⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎣⎦ 因为状态反馈极点为{}123---,令估计器极点为-4,取10l =,26l =估计器方程:224925zz u y =---&010ˆ105105x z y ⎡⎤⎡⎤⎢⎥⎢⎥=-+-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦六、对下列连续时间非线性时不变系统,判断原点平衡状态0e x =是否为大范围渐进稳定。