线性系统理论(参考答案)
《线性系统理论基础》第三章作业及答案

第三章作业及答案3.1 判断下列系统的能控性和能观测性。
2) []x y u x x 111,100041020122-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=解:2C 012000101Q bAbA b -⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦,2c rankQ n =<∴ 系统是状态不完全能控的2111101121o c Q cA cA -⎡⎤⎡⎤⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦,o 2rankQ n =<∴ 系统是状态不完全能观测的。
3.2 判断下列系统的能控性和能观测性。
1) []x y u x x 101,101300040002=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=2) x y u x x⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=01011000,1110000130000200001000113) []x y u x x 101,110200020012=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=4) x y u x x ⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=610321,029331100050005解:由系统能控和能观测性判据:1)A 为对角标准型,且对角元素互不相同,B 阵有全零元素的行,所以系统是不完全能控;C 阵中有全零元素的列,故系统是不完全能观测的。
2)1100100100000001A B C=0020011010000311⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦A 为约旦标准型,且各约旦块对角元素不相同,第一个约旦块最后一行对应到B 阵中的相应行为全零元素行,所以系统是不完全能控的;而各约旦块第一列对应到C 阵无全零元素列,所以系统是完全能观测的。
3)A =210020002⎡⎤-⎢⎥-⎢⎥⎢⎥-⎣⎦ B =011⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦C =[]101A 为约旦标准型,但两个约旦块元素相同,课本上给出的由标准型判定系统能控、能观测的定理不再适用,因此要采用能控性判别矩阵和能观测性判别矩阵来判断。
线性系统参考题(三)

线性系统参考题(三)一、线性系统的脉冲响应为()t t g t e e -=-。
该系统是一个完全能控系统,它的状态方程有三个极点,其中一个是-2。
(1)求出该系统的传递函数; (2)求出该系统的最小实现;(3)求出该系统的三阶能控标准型,这一实现与原系统的状态方程有何关系?为什么? (4)求出该系统的三阶能观标准型,这一实现与原系统的状态方程有何关系?为什么?二、系统状态方程如下:0011[10]x x y x⎡⎤=⎢⎥-⎣⎦= (1)判断该系统的能观性。
(2)能否设计一个观测器渐近估计系统的状态(即当时间趋向无穷时,估计误差趋向零)? (3)求出系统矩阵的特征向量;(4)若系统的厨师状态分别为0(0)1x α⎡⎤=⎢⎥⎣⎦和1(0)1x β⎡⎤=⎢⎥⎣⎦,求出相应的系统响应并说明这两个响应的特点;(5)已知系统的初始状态为1(0)1x β⎡⎤=⎢⎥⎣⎦,是否可通过测量输出完全确定系统的状态信息?三、系统的传递函数矩阵如下:2211(1)()102s s G s s ⎡⎤+⎢⎥+⎢⎥=⎢⎥⎢⎥+⎣⎦ (1)求出该系统的零点和它们相应的左右方向向量; (2)求出该系统的最小实现;(3)对于该系统是否有不为零的输入能使得输出恒等于零?若是,则写出相应的输入信号,并给出能使输出信号为零的条件;(4)在什么样的输入信号下,系统的输出不为零,但是输出的终值为零?四、考虑线性系统010*********[101]xx u y x⎡⎤⎡⎤⎢⎥⎢⎥=--+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦=其中u 是控制信号,y 是系统的输出。
(1)判断该系统的能控、能观性;(2)设计一状态反馈使得系统传递函数有一对稳定的复数根,其实部为-5,2;(3)分析在初始状态不为零时,确定系统输出性能的关键因数是什么? (5)设计一个基于状态观测器的反馈系统;(5)画出相应的系统结构图。
参考答案一、解:(1)112()[()]11(1)(1)G s L g t s s s s ==-=-+-+(2)我们可以采用基于分式分解的约当形实现11()11G s s s =--+可直接得出状态空间描述:[]11221210101111xx u x x x y x ⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤=⎢⎥⎣⎦此实现为系统最小实现。
线性系统课后答案第2章
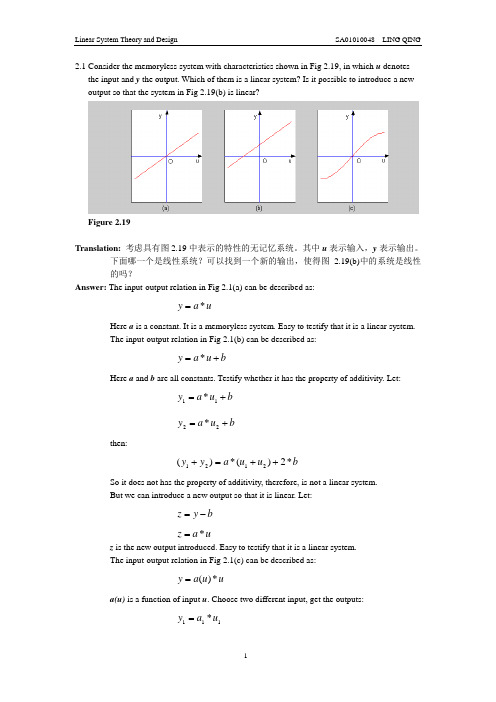
2.1 Consider the memoryless system with characteristics shown in Fig 2.19, in which u denotes the input and y the output. Which of them is a linear system? Is it possible to introduce a new output so that the system in Fig 2.19(b) is linear?Figure 2.19Translation: 考虑具有图2.19中表示的特性的无记忆系统。
其中u 表示输入,y 表示输出。
下面哪一个是线性系统?可以找到一个新的输出,使得图2.19(b)中的系统是线性的吗?Answer: The input-output relation in Fig 2.1(a) can be described as:u a y *=Here a is a constant. It is a memoryless system. Easy to testify that it is a linear system. The input-output relation in Fig 2.1(b) can be described as:b u a y +=*Here a and b are all constants. Testify whether it has the property of additivity. Let: b u a y +=11*b u a y +=22*then:b u u a y y *2)(*)(2121++=+So it does not has the property of additivity, therefore, is not a linear system.But we can introduce a new output so that it is linear. Let:b y z -=u a z *=z is the new output introduced. Easy to testify that it is a linear system.The input-output relation in Fig 2.1(c) can be described as:u u a y *)(=a(u) is a function of input u . Choose two different input, get the outputs:111*u a y =222*u a y =Assure:21a a ≠then:221121**)(u a u a y y +=+So it does not has the property of additivity, therefore, is not a linear system.2.2 The impulse response of an ideal lowpass filter is given by)(2)(2sin 2)(00t t t t t g --=ωωω for all t , where w and to are constants. Is the ideal lowpass filter causal? Is is possible to built the filter in the real world?Translation: 理想低通滤波器的冲激响应如式所示。
第一篇线性系统理论习题答案

9-7 设有三维状态方程
⎡0 ⎤ ⎢1 ⎥ ⎢ ⎥ ⎢ ⎣1 ⎥ ⎦
1 s + s +1 s 2 s + s +1
2
0
⎤ 0 ⎥ ⎥ ⎡0 ⎤ s 2 + 2 s 1⎥ = 3 0 ⎥ ⎢ ⎢ s −1 ⎥ ⎥ 1 ⎥ ⎢ ⎣1⎥ ⎦ s − 1⎥ ⎦
⎡ R M ⎤ ⎡ R −1 ∵⎢ ⎥×⎢ ⎣0 T ⎦ ⎣ 0
− R −1 MT −1 ⎤ ⎡ R −1 ⎥=⎢ T− ⎦ ⎣ 0
⎡R M ⎤ ∴⎢ ⎥ ⎣0 T ⎦
9-10 解
−1
⎡ R −1 =⎢ ⎣ 0
− R −1 MT −1 ⎤ ⎥ T −1 ⎦
−1
对可控标准形 A 和 b ,计算 ( sI − A) b
+
v2
& 2 = x1 + y = x1 − C 2 x
写成矩阵形式为
1 1 x2 + U R2 R2
图 9-1 RLC 网络
⎡ R1 − & x ⎡ 1 ⎤ ⎢ L1 ⎢x ⎥=⎢ ⎣ &2 ⎦ ⎢ 0 ⎢ ⎣
⎤ ⎡ 1 ⎤ 0 ⎥ x ⎡ ⎤ ⎢ L ⎥ ⎥ ⎢ 1 ⎥ + ⎢ 1 ⎥U − 1 ⎥ ⎣ x2 ⎦ ⎢ − 1 ⎥ ⎢ R2 C 2 ⎥ ⎦ ⎣ R2 C 2 ⎥ ⎦
x1 , x 2 有下列关系存在 x1 = x1 + x 2 x 2 = − x1 − 2 x 2
试求系统在 x 坐标中的状态方程。 解 ①
&1 = x & = x2 x &2 = & & = −2 x1 − 3 x 2 + u x x
《线性系统理论基础》第三章作业及答案
第三章作业及答案3.1 判断下列系统的能控性和能观测性。
2) []x y u x x 111,100041020122-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=解:2C 012000101Q bAbA b -⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦,2c rankQ n =<∴ 系统是状态不完全能控的2111101121o c Q cA cA -⎡⎤⎡⎤⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦,o 2rankQ n =<∴ 系统是状态不完全能观测的。
3.2 判断下列系统的能控性和能观测性。
1) []x y u x x 101,101300040002=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=2) x y u x x⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=01011000,1110000130000200001000113) []x y u x x 101,110200020012=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=4) x y u x x ⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=610321,029331100050005解:由系统能控和能观测性判据:1)A 为对角标准型,且对角元素互不相同,B 阵有全零元素的行,所以系统是不完全能控;C 阵中有全零元素的列,故系统是不完全能观测的。
2)1100100100000001A B C=0020011010000311⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦A 为约旦标准型,且各约旦块对角元素不相同,第一个约旦块最后一行对应到B 阵中的相应行为全零元素行,所以系统是不完全能控的;而各约旦块第一列对应到C 阵无全零元素列,所以系统是完全能观测的。
3)A =210020002⎡⎤-⎢⎥-⎢⎥⎢⎥-⎣⎦ B =011⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦C =[]101A 为约旦标准型,但两个约旦块元素相同,课本上给出的由标准型判定系统能控、能观测的定理不再适用,因此要采用能控性判别矩阵和能观测性判别矩阵来判断。
《线性系统理论基础》第一章作业及答案
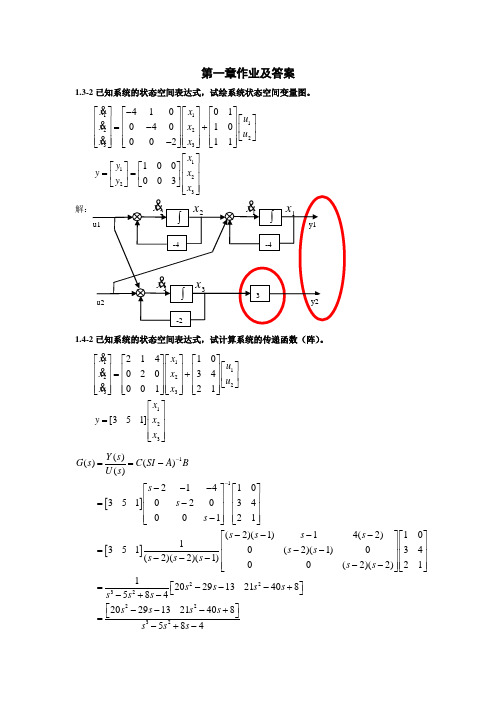
第一章作业及答案1.3-2已知系统的状态空间表达式,试绘系统状态空间变量图。
11122233112241001040100021110003xx u x x u x x x y y x y -⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦1.4-2已知系统的状态空间表达式,试计算系统的传递函数(阵)。
11122233123214100203400121[351]xx u x x u x x x y x x ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦[][]112232()()()()21410351020340121(2)(1)14(2)1013510(2)(1)034(2)(2)(1)00(2)(2)21120291321408584Y s G s C SI A B U s s s s s s s s s s s s s s s s s s s s s s --==----⎡⎤⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦----⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥---⎢⎥⎢⎥--⎣⎦⎣⎦⎡⎤=---+⎣⎦-+-223220291321408584s s s s s s s ⎡⎤---+⎣⎦=-+-注意:也可写做[][][]23220212940138584s s s s s +--+--+-1.5-1已知系统传递函数,试用传递函数求出系统的状态空间模型。
2()35()()(3)(2)Y s s G s U s s s +==++解:通过赋予研究对象不同的内部结构可将传递函数转换成不同的状态空间模型。
(1)求出上述传递函数能控标准型表示由已知条件可知该传递函数为严格真分式,且该系统为单入单出(SISO )三阶系统。
根据公式10111()...(),(1)()...mm mn n nY s b s b s b G s n m U s s a sa --+++===++++其中,可将传递函数写为223235035()(3)(2)82118s s s G s s s s s s +++==+++++其中,123012a 8,21,18,0,3,5a a b b b ======。
《线性系统理论》作业参考答案

x 11 e t x 21 , 21 0 , x
x11 ( t 0 ) 1 x 21 ( t 0 ) 0
,
x 12 e t x 22 , 22 0 , x
x12 ( t 0 ) 0 x 22 ( t 0 ) 1
解得
x12 e t e t 0 x11 1 , x 21 0 x 21 1 1 (t ) x 0 e
( sI A )
1
s ( s 1) 0 2 det( sI A ) s ( s 1) 0 adj ( sI A ) 1
s 1 ( s 1) 0
2
s ( s 1) 1 s ( s 1) 1 s 1 1
2
所以 e
。
可以看出, f ( i ) 是 f ( A ) 的一个特征值。
1-3 解:(1) 特征多项式为 1 ( ) ( 1 ) .
4
验证
A 1 I 0 , ( A 1 I ) 2 0 , ( A 1 I ) 3 0 , ( A 1 I ) 4 0
At
e t 1 1 L [( sI A ) ] 0 0
e 1 1 0
t
t t 1 e te t e 1 。 t e
1-5 证明:因为 D 1 存在,所以由 D R p p
A det C B IA det D 0 BD A I D C
c
k 0
k
A
k
设 x 是属于 i 的一个非零特征向量,故
A x i x
.
2 2 因此 A x A Ax A i x i Ax i i x i x .
北航线性系统理论答案

2-17 证明:①首先证明()T T T B C A ,,是()s G 的不可简约实现(该题有问题,不是()TT TCB A,,)。
由于()s G 是对称传递函数阵,故有()()T T T C sI B B A sI C 1-1-A --=,所以()TT TBC A,,是()s G 的实现。
又因为()[]n CA CA Crank CA C A C rank n Tn TT T T =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=1-1- ,其可控; 同理可证其可观,故系统()T T T B C A ,,是可控可观的。
所以其是()s G 的不可简约实现。
②证明P 的对称性。
由题设易知,由于()T T T B C A ,,是()s G 的不可简约实现,则存在非奇异阵P ,使得TT T BCPC PB A PAP===--11,,。
由T T T T T T P P I P P P CP P B C C PB =⇒=⇒==⇒=--11 所以P 是非奇异对称阵。
③证明P 的唯一性。
由T C PB =,很容易知道1-=B C P T ,故知P 是唯一的。
综上可知,命题得证。
2-18 解:[]1 1 3- 4 2301 4 0 2- 3-0 3 2- 6-0 02 0 0 0 0 1 -=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=C B A 。
a.① ><B A |由[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==65 17 5 2 3 3 3 3 00 0 0 1 1 1 1 32B A B A AB B U 所以)53012301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<,span B A 。
② η()⇔⋂=kCAker η064 27 118- 145-16 9 34- 43-4 3 10- 13-1 1 3- 4 032=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⇔=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡x x CACA CA C故)12101301(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,span η ③ ><⋂B A |η即任意>⇔<⋂∈B A x |η2153012301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,同时有4312101301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=故0--1 1 5 22 3 3 31 0 0 00 1 1 14321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x x x x ,有)1301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂span B A η ④ ⊥><⋂B A |η 易知,⇔>∈<⊥B A x |[]065 17 5 2 3 3 3 3 0 0 0 0 1 1 1 1 32=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=T TxB A B A AB B x,即 065 3 0 117 3 0 15 3 0 12 3 0 1=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x 所以)0103-0010(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⊥,span B A 同③,可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⋂⊥0000|B A η⑤ ><⋂⊥B A |η)101-1-0123(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⊥,span η同③可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂⊥0000|B A η⑥ ⊥⊥><⋂B A |η易知)0123(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=><⋂⊥⊥span B A η 综上可知,上述空间的维数加起来不等于4,故在上述空间的直和空间中不能取到状态空间的基底。