线性系统理论课后答案
北航线性系统理论完整版答案
1-1 证明:由矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=12-n 1-n n- - - -1 0 1 0 00 0 1 0a a a a A可知A 的特征多项式为nn n n n n n n n n nn n n n a a a a a a a a a a a a a a a a a a a a a a a A I ++++++=+++++=+++=++=+=-+λλλλλλλλλλλλλλλλλλλλλλλ1-3-32-21-11-3-3122-2-1-n 13-n 2-n 21-1n 12-n 1-n 12-n 1-n n1- )1(-)1(- 00 0 1- )1(-)1(- 0 00 1-1 0 1- 0 00 1-若i λ是A 的特征值,则00 0 0 1 10 1- 0 0 0 1-111n 1-n i 12-n 1-n n =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=++++=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--ni n i n i i i i i a a a a a a a λλλλλλλλ 所以[]Ti i 1-n i 2 1 λλλ 是属于i λ的特征向量。
1-7 解:由于()ττ--t e t g =,,可知当τ<t 时,()0≠τ,t g ,所以系统不具有因果性。
又由于()()0 ,,ττ-=t g t g ,所以系统是时不变的。
1-8 解:容易验证该系统满足齐次性与可加性,所以此系统是线性的。
由于()()t 0 t ⎩⎨⎧>≤-=-=ααββαβαt u t u P u Q P 而()()⎩⎨⎧+>+≤-=⎩⎨⎧>≤=βαβαβααβαβ t 0 t t 0 t t u t u Q u P Q ,故u P Q u Q P αββα≠,所以系统是时变的。
又因为()()()()()⎩⎨⎧>≤=⎩⎨⎧>≤=ααααα,,T T t u t u P u P P T T min t 0 min t t 0 t 而()()()()()()()⎩⎨⎧>≤=⎩⎨⎧>≤=ααααα,,,,T T t u T T t u P u P P P T T T min t 0 min t min t 0 min t ,故()()u P P P u P P T T T αα=,所以系统具有因果性。
线性系统理论课后答案

6 XI 给定图P2.12)和<b)所示两个电路,试列写出其状态方S 和输出方程。
其中, 分别指定:⑹状态变组廿二叱•勺输入变M « = ef(r):输出支量尹=/(b)状态变宣组X 严气,输入变S“y(O;输出变量丿■“CP2 1解 本题A 于由物理系统養立状态令问描述的基本题,意在训练正磧和熟塚运用电 路定律列写岀电路的状态方程和输出方程•(1)列写P2・l(a)电路的状态方程和输山方程。
首先.考虎到电容C 和电感E 为给定 电路中仅有的两个储能元件•电容端电压弋和流经电感电流了构成此电路的线性无关极 人变*组,从而透取状态变*组州=%:和巧=i 符合定义要求。
基此,利用电路元件关 系式和回路基尔《夫定律,定出电路方程为C 虬r dr L —+= e再由上述电路方程导出状态变量陀和i 的导》项,可得到状态变査方程规范形式, 血C I •—=—(tU C d/ 1 心 1 d/L c L L表%=3山和dW/dn 并将上述方程组表为向量方程,就得到此电路的状态方程:继而.按约定输出y = A 可直接得到此电路的输出方程:(b)列写P2.i(b)电路的状态方程和«ta 方程•类似地.考虑到电容C ]和C2为给定电 路中仅有的两个储能元件,电容端电压乜和七构成此电路的线性无关极大变fi 组,选 取状态变量组二叱和可二叱2符合定义要求,基此,利用电路元件关系式和回路基尔 霍夫定定出电路方程为dur GRpM 叱+叱之71RZ,皿6再由上述电路方程导出状态变量叱和叱的导数项,可得到状态变量方程规范形式: % 1 I 1少GR q GR 5 C,Kdr 表M 也C| /曲和 MqI方程:继而,按约定输出y =坯,可由电路导出:尸叱=%+七 将其表为向*方程,就得萸i 此电路的皴出方程,八不叱~孫"6 +丽e并将上述方程组表为向量方程,就得封此电路的状态K2.6求出下列^输入输出描述的一个状态空同描述: (i) 施)二 2^2 十 18$+40u(s)『+ 6“ +11S+6 (ii) 型十妙⑴_u(j) (g + 3)2(zl)解本®属于由传递函数型输入输出描述导出狀态空间描述的基本fi 。
线性系统课后答案第5章

5.1Is the network shown in Fing5.2 BIBO stable ? If not , find a bounded input that will excite an unbound output 图5.2 的网络BIBO 是否稳定?如果不是.请举出 一般激励无界输出的有界输入. From Fig5.2 .we can obtain that xy yu x =-=Assuming zero initial and applying Laplace transform then we have1)(ˆ)(ˆ)(ˆ2+==s ss us y s yt s sL s g L t g cos ]1[)]([)(211=+==-- because⎰⎰⎰∑⎰∞∞∞=π+π++-+==02002322121cos )1(cos |cos ||)(|x k k k k tdttdt dt t dt t g=1+∑∞=+π+π-π+π-021231)sin()2[sin()1(k k k=1+∑∞=+π-π--021231]sin [sin )1()1(k k k=1+∑∞=++-⋅--012122)1()1(k k k )(=1+2∑∞=01k =∞Which is not bounded .thus the network shown in Fin5.2 is not BIBO stable ,If u(t)=sint ,then we have y(t)=⎰⎰τ-τ=τττ-ttt d t 0)sin(cos sin )cos(τd =⎰=τt t t td 0sin 21sin 21 we can see u(t)is bounded ,and the output excited by this input is not bounded5.2consider a system with an irrational function )(ˆs y.show that a necessary condition for the system to be BIBO stable is that |g(s)| is finite for all Res ≥ 0一个系统的传递函数是S 的非有理式。
线性系统课后答案第2章
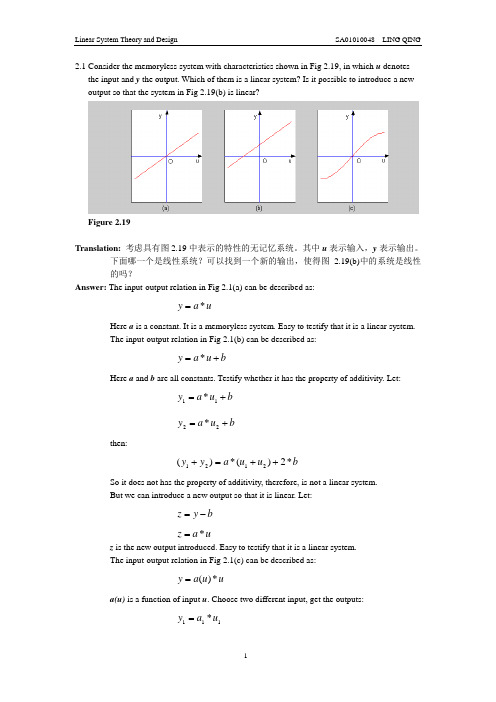
2.1 Consider the memoryless system with characteristics shown in Fig 2.19, in which u denotes the input and y the output. Which of them is a linear system? Is it possible to introduce a new output so that the system in Fig 2.19(b) is linear?Figure 2.19Translation: 考虑具有图2.19中表示的特性的无记忆系统。
其中u 表示输入,y 表示输出。
下面哪一个是线性系统?可以找到一个新的输出,使得图2.19(b)中的系统是线性的吗?Answer: The input-output relation in Fig 2.1(a) can be described as:u a y *=Here a is a constant. It is a memoryless system. Easy to testify that it is a linear system. The input-output relation in Fig 2.1(b) can be described as:b u a y +=*Here a and b are all constants. Testify whether it has the property of additivity. Let: b u a y +=11*b u a y +=22*then:b u u a y y *2)(*)(2121++=+So it does not has the property of additivity, therefore, is not a linear system.But we can introduce a new output so that it is linear. Let:b y z -=u a z *=z is the new output introduced. Easy to testify that it is a linear system.The input-output relation in Fig 2.1(c) can be described as:u u a y *)(=a(u) is a function of input u . Choose two different input, get the outputs:111*u a y =222*u a y =Assure:21a a ≠then:221121**)(u a u a y y +=+So it does not has the property of additivity, therefore, is not a linear system.2.2 The impulse response of an ideal lowpass filter is given by)(2)(2sin 2)(00t t t t t g --=ωωω for all t , where w and to are constants. Is the ideal lowpass filter causal? Is is possible to built the filter in the real world?Translation: 理想低通滤波器的冲激响应如式所示。
第一篇线性系统理论习题答案

9-7 设有三维状态方程
⎡0 ⎤ ⎢1 ⎥ ⎢ ⎥ ⎢ ⎣1 ⎥ ⎦
1 s + s +1 s 2 s + s +1
2
0
⎤ 0 ⎥ ⎥ ⎡0 ⎤ s 2 + 2 s 1⎥ = 3 0 ⎥ ⎢ ⎢ s −1 ⎥ ⎥ 1 ⎥ ⎢ ⎣1⎥ ⎦ s − 1⎥ ⎦
⎡ R M ⎤ ⎡ R −1 ∵⎢ ⎥×⎢ ⎣0 T ⎦ ⎣ 0
− R −1 MT −1 ⎤ ⎡ R −1 ⎥=⎢ T− ⎦ ⎣ 0
⎡R M ⎤ ∴⎢ ⎥ ⎣0 T ⎦
9-10 解
−1
⎡ R −1 =⎢ ⎣ 0
− R −1 MT −1 ⎤ ⎥ T −1 ⎦
−1
对可控标准形 A 和 b ,计算 ( sI − A) b
+
v2
& 2 = x1 + y = x1 − C 2 x
写成矩阵形式为
1 1 x2 + U R2 R2
图 9-1 RLC 网络
⎡ R1 − & x ⎡ 1 ⎤ ⎢ L1 ⎢x ⎥=⎢ ⎣ &2 ⎦ ⎢ 0 ⎢ ⎣
⎤ ⎡ 1 ⎤ 0 ⎥ x ⎡ ⎤ ⎢ L ⎥ ⎥ ⎢ 1 ⎥ + ⎢ 1 ⎥U − 1 ⎥ ⎣ x2 ⎦ ⎢ − 1 ⎥ ⎢ R2 C 2 ⎥ ⎦ ⎣ R2 C 2 ⎥ ⎦
x1 , x 2 有下列关系存在 x1 = x1 + x 2 x 2 = − x1 − 2 x 2
试求系统在 x 坐标中的状态方程。 解 ①
&1 = x & = x2 x &2 = & & = −2 x1 − 3 x 2 + u x x
《线性系统理论》作业参考答案

x 11 e t x 21 , 21 0 , x
x11 ( t 0 ) 1 x 21 ( t 0 ) 0
,
x 12 e t x 22 , 22 0 , x
x12 ( t 0 ) 0 x 22 ( t 0 ) 1
解得
x12 e t e t 0 x11 1 , x 21 0 x 21 1 1 (t ) x 0 e
( sI A )
1
s ( s 1) 0 2 det( sI A ) s ( s 1) 0 adj ( sI A ) 1
s 1 ( s 1) 0
2
s ( s 1) 1 s ( s 1) 1 s 1 1
2
所以 e
。
可以看出, f ( i ) 是 f ( A ) 的一个特征值。
1-3 解:(1) 特征多项式为 1 ( ) ( 1 ) .
4
验证
A 1 I 0 , ( A 1 I ) 2 0 , ( A 1 I ) 3 0 , ( A 1 I ) 4 0
At
e t 1 1 L [( sI A ) ] 0 0
e 1 1 0
t
t t 1 e te t e 1 。 t e
1-5 证明:因为 D 1 存在,所以由 D R p p
A det C B IA det D 0 BD A I D C
c
k 0
k
A
k
设 x 是属于 i 的一个非零特征向量,故
A x i x
.
2 2 因此 A x A Ax A i x i Ax i i x i x .
线性系统课后答案第4章
PROBLEMS OF CHAPTER 44.1 An oscillation can be generated by 一个振荡器可由下式描述:X X ⎥⎦⎤⎢⎣⎡-=0110 试证其解为:Show that its solution is )0(cos sin sin cos )(X t t t t t X ⎥⎦⎤⎢⎣⎡-=Proof: )0()0()(0110X eX e t X t At ⎥⎦⎤⎢⎣⎡-== ,the eigenvalues of A are j,-j;Let λββλ10)(+=h .If te h λλ=)(,then on the spectrum of A,thentj t e j j h t j t e j j h jt jt sin cos )(sin cos )(1010-==-=-+==+=-ββββ thenttsin cos 10==ββso ⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡=+=t t t t t t A I A h cos sin sin cos 0110sin 1001cos )(10ββ )0(cos sin sin cos )0()0()(0110X t t t t X eX e t X t At ⎥⎦⎤⎢⎣⎡-===⎥⎦⎤⎢⎣⎡- 4.2 Use two different methods to find the unit-step response of 用两种方法求下面系统的单位阶跃响应:U X X ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=112210[]X Y 32=Answer: assuming the initial state is zero state.method1:we use (3.20) to compute⎥⎦⎤⎢⎣⎡-+++=⎥⎦⎤⎢⎣⎡+-=---s s s s s s A sI 212221221)(211then t At e t t tt tt A sI L e ---⎥⎦⎤⎢⎣⎡--+=-=sin cos sin 2sin sin cos ))((11 and )22(5)22(5)()()(221++=++=-=-s s s s s s s BU A sI C s Y then t e t y tsin 5)(-= for t>=0method2:ttt tt At tt A tt A te t e t e t e t e C Be e CA B d e C d Bu e C t y --------=⎥⎦⎤⎢⎣⎡---+⎥⎦⎤⎢⎣⎡--=-===⎰⎰sin 51sin 3cos 1sin 2cos 015.01)()()(010)(0)(τττττfor t>=04.3 Discretize the state equation in Problem 4.2 for T=1 and T=π.离散化习题4.3中的状态方程,T 分别取1和π Answer:][][][][][]1[0k DU k CX k Y k BU d e k X e k X TA AT +=⎪⎭⎫ ⎝⎛+=+⎰ααFor T=1,use matlab: [ab,bd]=c2d(a,b,1) ab =0.5083 0.3096 -0.6191 -0.1108 bd =1.0471 -0.1821[]][32][][1821.00471.1][1108.06191.03096.05083.0]1[k X k Y k U k X k X =⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--=+for T=π,use matlab:[ab,bd]=c2d(a,b,3.1415926) ab =-0.0432 0.0000 -0.0000 -0.0432 bd =1.5648 -1.0432[]][32][][0432.15648.1][0432.0000432.0]1[k X k Y k U k X k X =⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--=+ 4.4 Find the companion-form and modal-form equivalent equations of 求系统的等价友形和模式规范形。
北航线性系统理论答案
2-17 证明:①首先证明()T T T B C A ,,是()s G 的不可简约实现(该题有问题,不是()TT TCB A,,)。
由于()s G 是对称传递函数阵,故有()()T T T C sI B B A sI C 1-1-A --=,所以()TT TBC A,,是()s G 的实现。
又因为()[]n CA CA Crank CA C A C rank n Tn TT T T =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=1-1- ,其可控; 同理可证其可观,故系统()T T T B C A ,,是可控可观的。
所以其是()s G 的不可简约实现。
②证明P 的对称性。
由题设易知,由于()T T T B C A ,,是()s G 的不可简约实现,则存在非奇异阵P ,使得TT T BCPC PB A PAP===--11,,。
由T T T T T T P P I P P P CP P B C C PB =⇒=⇒==⇒=--11 所以P 是非奇异对称阵。
③证明P 的唯一性。
由T C PB =,很容易知道1-=B C P T ,故知P 是唯一的。
综上可知,命题得证。
2-18 解:[]1 1 3- 4 2301 4 0 2- 3-0 3 2- 6-0 02 0 0 0 0 1 -=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=C B A 。
a.① ><B A |由[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==65 17 5 2 3 3 3 3 00 0 0 1 1 1 1 32B A B A AB B U 所以)53012301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<,span B A 。
② η()⇔⋂=kCAker η064 27 118- 145-16 9 34- 43-4 3 10- 13-1 1 3- 4 032=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⇔=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡x x CACA CA C故)12101301(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,span η ③ ><⋂B A |η即任意>⇔<⋂∈B A x |η2153012301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,同时有4312101301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=故0--1 1 5 22 3 3 31 0 0 00 1 1 14321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x x x x ,有)1301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂span B A η ④ ⊥><⋂B A |η 易知,⇔>∈<⊥B A x |[]065 17 5 2 3 3 3 3 0 0 0 0 1 1 1 1 32=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=T TxB A B A AB B x,即 065 3 0 117 3 0 15 3 0 12 3 0 1=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x 所以)0103-0010(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⊥,span B A 同③,可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⋂⊥0000|B A η⑤ ><⋂⊥B A |η)101-1-0123(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⊥,span η同③可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂⊥0000|B A η⑥ ⊥⊥><⋂B A |η易知)0123(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=><⋂⊥⊥span B A η 综上可知,上述空间的维数加起来不等于4,故在上述空间的直和空间中不能取到状态空间的基底。
中国科学技术大学自动化专业《线性系统理论和设计》习题1-6章习题答案
1.7 证明:())()det(det )det(det )(det )det()det()(1111λλλλλλλA B A I T A I T T A I T AT T I B I AT T B B A ∆=-=⋅-⋅-=-=-=∆⇒=----相似,与设= 又因为特征值为特征方程()0λ∆=的根,故特征值也相同。
1.11 解:可以参照课本P18的例题1.12(1),3,2,1)3)(2)(1()(,300020104132111===⇒---=∆⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=λλλλλλA A ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==Λ∴⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⇒=--3211000105411050140010)(1113211Q A Q Q q q q q A I ,,由λ(4),2,1,1)2)(1)(1()(4344111432124==-==⇒-+-=∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--λλλλλλλA ,1241243111111()0,111122,()012,12,4822 2.P I A q q q u I A q q u λλλλλξλλη⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥==--=⇒==⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦==-=⎡⎤⎢⎥⎢⎥==<=⎢⎥⎢⎥⎣⎦===对于,,由对于的特征值,其代数重数 由计算其对应的特征向量计算出一个特征向量,即几何重数个数小于代数重数,即标准型中存在一个对应的约当块,约当块的阶数即的指数可以利用[]4443434123414418 1.682,()001110111121,,44114412121181211212q I A q q q c q q Q q q q q Q A Q λλ-=-=⇒⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⋅-=∴==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥-⎢⎥∴Λ==⎢⎥⎢⎥⎣⎦的式计算的广义特征向量由取1.12 证明:12n 222112n n 1n-1n-112n 21n 121n 1221n n 1n-3n-3221n 21n-22n-2n-2221n n 1111(1110()()0()()(0()()λλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλ-⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦⎡⎤--⎢⎥--⎢⎥--⎢⎥==⎢⎥--⎢⎥⎢⎥--⎣⎦后一行减去前一行的倍)n-221n n 123n 2131n 1n-2n-2n-223n j i 1i j n)()111()()()()()λλλλλλλλλλλλλλλλλλ≤<≤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎡⎤⎢⎥⎢⎥=---=⎢⎥⎢⎥⎣⎦=-∏同理2.6 解:(d) 令24231211y x y x yx y x ====,,,,则状态空间方程为: u m m k m k m k mk ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡--=0010020100000200112211x xx y ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=010*******y y (e) 令yx y x ==21,,则状态空间方程为: u e e t t ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=-10102x x[]x y 01= 2.7 解:(c)非线性方程: ⎩⎨⎧==21221u-x xx x[]x y 01= (d) 设⎪⎩⎪⎨⎧+=⇒=+⋅++-=⇒=+⋅+ux sx x u)(x s u x x sx x s )x (u 333221122121112,则状态空间方程可为:u ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=310312x x[]x y 01= 另法:先求出传递函数2323s G(s)s s +=+-,按2.6(b )方法求解。
线性系统理论+课后答案+(程兆林+马树萍+著)+科学出版社
t 0
⎡e −t ⎢ At 11. 解: e = ⎢ 0 ⎢0 ⎣
课
⎛ (4t − 1)e − t + e −2t ⎞ ⎟ =⎜ ⎜ (3 − 4t )e −t − 2e − 2t ⎟ . ⎝ ⎠
te− t e−t
x(t ) = e At x0 + ∫ e A(t −τ ) Bu (τ )dτ
= e x0 +
⎡ e −τ ⎢ ⎢0 ⎢0 ⎣
w.
⎞ ⎟dτ ⎟ ⎠
案 网
e −τ − e −2τ ⎞⎛ 2 ⎞ −(t −τ ) ⎟⎜ dτ ⎜ ⎟ ⎟e 2e − 2τ − e −τ ⎟ ⎠⎝ 0 ⎠
τ e−τ
e
−τ
0
0 ⎤ ⎡0 ⎤ ⎥ ⎥ 0 ⎥⎢ ⎢1 ⎥ dτ −2τ ⎥ e ⎦⎢ ⎣ 4⎥ ⎦
co
x(t ) = e At x(0) + ∫ e A( t −τ ) Bu (τ )dτ
0
⎛ 2e − t − e −2t =⎜ ⎜ − 2e − t + 2e − 2 t ⎝ ⎛ 2e −τ − e −2τ +∫ ⎜ 0 ⎜ − 2e −τ + 2e − 2τ ⎝
t
e − t − e −2t ⎞⎛ 0 ⎞ ⎟⎜ ⎜ ⎟ ⎟ − e − t + 2e − t ⎟ ⎠⎝ 1 ⎠
w.
0
kh
C1 s n−1 + " + Cn−1 s + Cn + C0 . s n + a1s n−1 + " + an−1 s + an
9. 证明类似定理 1.4, 此处略.
w.
−1
1 0⎞ ⎛ 0 ⎛0⎞ ⎜ ⎟ ⎜ ⎟ 7.解:(1) A = ⎜ − 2 − 3 0 ⎟ , B = ⎜ 1 ⎟ , C = (0 0 1) . ⎜ − 1 1 3⎟ ⎜ 2⎟ ⎝ ⎠ ⎝ ⎠