线性系统理论(参考答案)(1)
(完整word版)《线性系统理论》试卷及答案
R C 2《线性系统理论》试卷及答案1、(20分)如图所示RLC 网络,若e(t )为系统输入变量r (t),电阻R 2两端的电压为输出量y(t),选定状态变量为 x 1(t)=v 1(t ),x 2(t )=v 2(t),x 3(t)=i (t)要求列写出系统的状态空间描述。
2、(15分)求出下面的输入输出描述的一个状态空间描述。
y (4)+4y (3)+3y (2)+7y (1)+3y=u (3)+ 2u (1)+ 3u3、(15分)计算下列线性系统的传递函数。
[]210X 13101X y -⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦=4、(10分)分析下列系统的能控性.0111X X u a b •⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦5、(10分)分析下列系统的能观性。
[]1110a X X y Xb •⎡⎤==-⎢⎥⎣⎦6、(15分)判断下列系统的原点平衡状态x e 是否大范围渐近稳定。
12221123x x x x x x==--7、(15分)已知系统的状态方程为221012000401X X u •--⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦试确定一个状态反馈阵K,使闭环极点配置为λ1*=—2、λ2*=-3、λ3*=—4.答案:1、(20分)如图所示RLC 网络,若e (t )为系统输入变量r (t ),电阻R 2两端的电压为输出量y (t ),选定状态变量为 x 1(t)=v 1(t),x 2(t )=v 2(t ),x 3(t)=i (t )要求列写出系统的状态空间描述。
2、(15分)求出下面的输入输出描述的一个状态空间描述。
列出向量表示形式解出解出解出r x x x L R x x x rx LR x x x xx x C R x x x C xC x r x R x L L LL⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--=-=+=+==++1321113211311132122222112211333113000xy x xLy (4)+4y (3)+3y (2)+7y (1)+3y=u (3)+ 2u (1)+ 3u[]得出了状态空间表达式列出向量表示形式,就求导,有选取状态变量令有令⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=++=⎪⎪⎩⎪⎪⎨⎧+----=========⎩⎨⎧++==++++++++=++++++===43211025233375y ~y ~x y ~x y ~...y ~x y ~x y ~3y ~2y ~y ~3y ~7y ~3y ~4y ~u 3734p 1y ~3734p 32p y d/dtp 4214321(4)43(2)22(1)1(3)4(1)21(1)(3)(1)(2)(3)(4)2342343x x x x x x x y u x x x x x x x x y u p p p u p p p p(完整word 版)《线性系统理论》试卷及答案3、(15分)计算下列线性系统的传递函数.[]Xy u X 10103112X =⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=[][][]计算得出传递函数⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-------=-=⎥⎦⎤⎢⎣⎡-------=⎥⎦⎤⎢⎣⎡--=--==⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡--==⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=----1021131)3)(2(110)()(21131)3)(2(13112)()()(1010311210103112X 1111s s s s B A Is C s G s s s s s s A Is BA Is C s G CB A Xy u X(完整word 版)《线性系统理论》试卷及答案4、(10分)分析下列系统的能控性。
线性系统理论试题

x&1 x&2
=
−7
0
x&3 0
0 −5 0
0 x1 0
0
x2
+
4
−1 x3 7
0
0 5
u1 u2
解:由于对角规范型中 B 包含元素全为零的行,故系统不完全能控。
3.(约当规范形判据的应用)判断下面系统的能控性和能观性
1 1 0 0 0 1
x&
=
0 0
1 0
0 1
u = e(t),输出变量 y = uc。
解:
e
=
uc
+
R
⋅C
duc dt
, x& = − 1 x + 1 u RC RC
, y=x
2.(由输入输出描述建立状态空间描述)系统的传递函数如下,求系统的状态空 间描述
G(s)
=
s3
s2 + s + 5 + 6 s2 + 12 s
+
4
0 解:可控标准形, x& = 0
s −1 0 1 det(sI − A) = 0 s −1 0 = (s −1)2 (s − 2) = 0
0 0 s−2
则系统特征值为 λ1 = 1( λ1 的代数重数 σ1 = 2 ), λ2 = 2 ( λ2 的代数重数 σ 2 = 1 )。 (2)有重特征值,判断是否可以化为对角规范形
对于 2 重特征值 λ1 = 1,它所对应的特征矩阵
1 0
υ11
= 1,υ22
= 1 ,得到
2
个属于二重特征值 λ1
= 1的特征向量υ1
=
0
线性系统理论第一章(习题)

若 li 是 A 的特征值,试证 [1 li li 2 li n -1 ]T 是属于 li 的特征向量。 1—2 若 li 是 A 的一个特征值,试证 f (li ) 是矩阵函数 f (A) 的一个特征值。 1—3 试求下列矩阵的特征多项式和最小多项式
é l1 1 0 0 ù ê ú ê 0 l1 1 0 ú ê ú ê ú ê 0 0 l1 0 ú ê ú ê 0 0 0 l1 ú ë û é l1 1 0 0 ù ê ú ê 0 l1 0 0 ú ê ú ê ú ê 0 0 l1 0 ú ê ú ê 0 0 0 l1 ú ë û é l1 1 0 0 ù ê ú ê 0 l1 0 0 ú ê ú ê ú ê 0 0 l1 1 ú ê ú ê 0 0 0 l1 ú ë û
y =
t
ò0 g(t - t )u(t )d t
若脉冲响应 g 由图 1—12(a)给定。试问,由图 1—12(b)所示的输入而激励的输出为何? g(t) 1 1 (a) 图 1—12 脉冲响应和输入作用 1—12 试求图 1—13 所示系统的动态方程式(略)
29
u(t) 1 2 t 1 2 (b) t
n >m
试证,给定初始状态 x(m ) = x0 下,时刻 n 的状态为 x(n )=F(n, m )x(0) 。若 A 与 n 无关,则
F(n, m ) 为何?
1—27 证明 x(n + 1) = A(n )x(n ) + B(n )u(n ) 的解为
n -1
x(n ) = F(n, m )x(m ) +
1 ù ú s+3ú 5s + 1 úú s + 2 úû
的实现,并画出其模拟图。 1—25 设{ A , B , C , D }和{ A , B , C , D }是两个线性时不变系统,其维数不一定相同。证明当 且仅当
清华线性系统控制理论作业一参考解答

2.(根据框图写出状态空间描述) 图2.2中描述了列车悬浮系统的工作原理,其中,1、2、3、 4为电磁装置,车辆通过电磁力的作用,悬浮于轨道上。磁悬浮控制系统的目的是通过调整 电磁作用力的输入,保证列车在运行过程中的平稳。这里我们考虑车辆运行过程中产在x和y 轴两个方向的位移,给出其线形化系统框图如图2.1所示
描述,其中g 是重力加速度常数,如图3所示,h 是自行车质心距地面高度,w 是两个轮子 与地面接触点的距离, b 是自行车质心投影与后轮和地面接触点的距离。 试给出该线性系统 的一个状态空间描述。
图3 参考文献: [3.1] Bicycles, motorcycles, and models-single-track vechicle modeling and control, IEEE Control Systems Magazine, October, 2006. 参考解答:
作业一
1.(线性化)已知倒立摆系统满足如下非线性状态方程
1 (t ) x2 (t ) x 2 (t ) ( g / l ) sin x1 (t ) u (t ) x
通过线性化给出系统在平衡解 [ x1 (), x2 ()] [0,0] , u () 0 的邻域内的线性模型。 参考解答:
图 2.2
参考解答:
注意状态变量的维数. 3. (从传递函数得到状态方程描述)图3中给出了解释自行车姿态动态平衡的原理图示。在 前进速度保持为定常v 的假设下,车把转角 对车身姿态角 的作用在平衡点( =0, =0)附近范围内可用微分方程
g v2 bv h hw wh
图2.1 这里A11=[100 0;0 200] B21=[10 -3;-5 16] C22=[1 1;1 -1]。 这里输入向量u是控制的作用力, 也就是车辆的加速度量, 输出向量y是车辆在两个轴方向的 位移量,通过间隙传感器测量。试列写出系统的状态空间模型。 参考文献: [2.1] H2 and H∞ control for MagLev vehicles,IEEE Control System Magazine, 1998 [2.2] Experimental comparison of linear and nonlinear controllers for a magnetic suspension, Proceedings of the 2000 IEEE International Conference on Control Applications,2000 [2.3] 广义线性磁悬浮对象的H∞控制问题,西安交通大学学报,Feb,2000
第一篇线性系统理论习题答案

T ⎡ s3 ⎤ ⎡− 2 − 1 1⎤ ⎢ T ⎥ 1⎢ P = ⎢ s3 A ⎥ = ⎢ 1 − 1 1⎥ ⎥ 3 ቤተ መጻሕፍቲ ባይዱ 2⎥ ⎢ s3 ⎢ ⎥ A 1 2 1 ⎣ ⎦ ⎣ ⎦
P
−1
A = PAP
9-13
−1
⎡0 1 0 ⎤ ⎥ =⎢ ⎢0 0 1 ⎥ ⎢ ⎣1 0 0 ⎥ ⎦
由约当形可控性判据知系统不可控,因为特征值 λ1 对应两个约当块。
4
9-9
若 R,T 可逆,试证明分块矩阵的下列恒等式
⎡R M ⎤ ⎢0 T ⎥ ⎣ ⎦
证明
−1
⎡ R −1 =⎢ ⎣ 0
− R −1 MT −1 ⎤ ⎥ T −1 ⎦
− R −1 MT −1 ⎤ ⎡ R M ⎤ ⎡ I 0⎤ ⎥×⎢ ⎥=⎢ ⎥ T− ⎦ ⎣ 0 T ⎦ ⎣0 I ⎦
2
③可控性矩阵为
3
S= b
[
Ab
⎡0 1 − 1⎤ ⎥ A b =⎢ ⎢1 − 1 0 ⎥ ⎢ 1⎥ ⎣1 1 ⎦
2
]
rankS = 3
−1
可控
0 ⎤ ⎡s − 1 −1 ⎢ G ( s ) = c(sI − A) b = [1 0 1]⎢1 s + 1 0 ⎥ ⎥ ⎢ ⎥ s − 0 0 1 ⎣ ⎦
& = Ax + bi u x
⎡ − 2 2 − 1⎤ A= ⎢ 0 −2 0 ⎥ ⎢ ⎥ 1 − 4 0 ⎢ ⎥ ⎣ ⎦
试判定 [ A , 解
( i = 1,2,3 )
⎡0⎤ b1 = ⎢0⎥ ⎢ ⎥ ⎢ ⎣1 ⎥ ⎦
⎡0⎤ b2 = ⎢ 1 ⎥ ⎢ ⎥ ⎢ ⎣0⎥ ⎦
《线性系统理论基础》第一章作业及答案
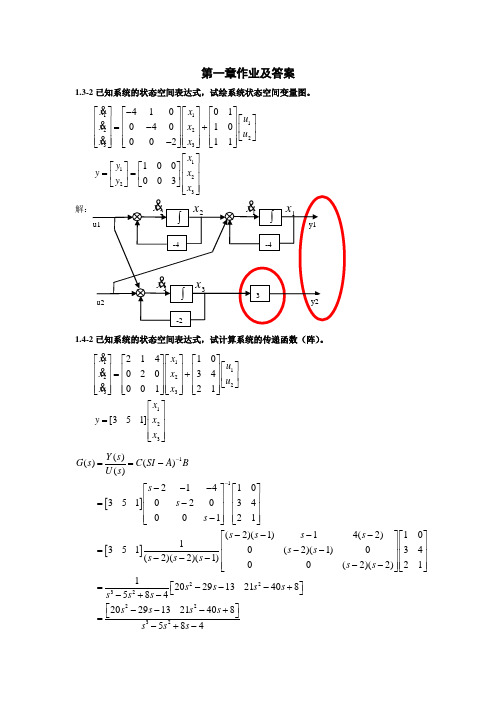
第一章作业及答案1.3-2已知系统的状态空间表达式,试绘系统状态空间变量图。
11122233112241001040100021110003xx u x x u x x x y y x y -⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦1.4-2已知系统的状态空间表达式,试计算系统的传递函数(阵)。
11122233123214100203400121[351]xx u x x u x x x y x x ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦[][]112232()()()()21410351020340121(2)(1)14(2)1013510(2)(1)034(2)(2)(1)00(2)(2)21120291321408584Y s G s C SI A B U s s s s s s s s s s s s s s s s s s s s s s --==----⎡⎤⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦----⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥---⎢⎥⎢⎥--⎣⎦⎣⎦⎡⎤=---+⎣⎦-+-223220291321408584s s s s s s s ⎡⎤---+⎣⎦=-+-注意:也可写做[][][]23220212940138584s s s s s +--+--+-1.5-1已知系统传递函数,试用传递函数求出系统的状态空间模型。
2()35()()(3)(2)Y s s G s U s s s +==++解:通过赋予研究对象不同的内部结构可将传递函数转换成不同的状态空间模型。
(1)求出上述传递函数能控标准型表示由已知条件可知该传递函数为严格真分式,且该系统为单入单出(SISO )三阶系统。
根据公式10111()...(),(1)()...mm mn n nY s b s b s b G s n m U s s a sa --+++===++++其中,可将传递函数写为223235035()(3)(2)82118s s s G s s s s s s +++==+++++其中,123012a 8,21,18,0,3,5a a b b b ======。
《线性系统理论》作业参考答案

x 11 e t x 21 , 21 0 , x
x11 ( t 0 ) 1 x 21 ( t 0 ) 0
,
x 12 e t x 22 , 22 0 , x
x12 ( t 0 ) 0 x 22 ( t 0 ) 1
解得
x12 e t e t 0 x11 1 , x 21 0 x 21 1 1 (t ) x 0 e
( sI A )
1
s ( s 1) 0 2 det( sI A ) s ( s 1) 0 adj ( sI A ) 1
s 1 ( s 1) 0
2
s ( s 1) 1 s ( s 1) 1 s 1 1
2
所以 e
。
可以看出, f ( i ) 是 f ( A ) 的一个特征值。
1-3 解:(1) 特征多项式为 1 ( ) ( 1 ) .
4
验证
A 1 I 0 , ( A 1 I ) 2 0 , ( A 1 I ) 3 0 , ( A 1 I ) 4 0
At
e t 1 1 L [( sI A ) ] 0 0
e 1 1 0
t
t t 1 e te t e 1 。 t e
1-5 证明:因为 D 1 存在,所以由 D R p p
A det C B IA det D 0 BD A I D C
c
k 0
k
A
k
设 x 是属于 i 的一个非零特征向量,故
A x i x
.
2 2 因此 A x A Ax A i x i Ax i i x i x .
北航线性系统理论答案

2-17 证明:①首先证明()T T T B C A ,,是()s G 的不可简约实现(该题有问题,不是()TT TCB A,,)。
由于()s G 是对称传递函数阵,故有()()T T T C sI B B A sI C 1-1-A --=,所以()TT TBC A,,是()s G 的实现。
又因为()[]n CA CA Crank CA C A C rank n Tn TT T T =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=1-1- ,其可控; 同理可证其可观,故系统()T T T B C A ,,是可控可观的。
所以其是()s G 的不可简约实现。
②证明P 的对称性。
由题设易知,由于()T T T B C A ,,是()s G 的不可简约实现,则存在非奇异阵P ,使得TT T BCPC PB A PAP===--11,,。
由T T T T T T P P I P P P CP P B C C PB =⇒=⇒==⇒=--11 所以P 是非奇异对称阵。
③证明P 的唯一性。
由T C PB =,很容易知道1-=B C P T ,故知P 是唯一的。
综上可知,命题得证。
2-18 解:[]1 1 3- 4 2301 4 0 2- 3-0 3 2- 6-0 02 0 0 0 0 1 -=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=C B A 。
a.① ><B A |由[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==65 17 5 2 3 3 3 3 00 0 0 1 1 1 1 32B A B A AB B U 所以)53012301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<,span B A 。
② η()⇔⋂=kCAker η064 27 118- 145-16 9 34- 43-4 3 10- 13-1 1 3- 4 032=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⇔=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡x x CACA CA C故)12101301(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,span η ③ ><⋂B A |η即任意>⇔<⋂∈B A x |η2153012301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,同时有4312101301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=故0--1 1 5 22 3 3 31 0 0 00 1 1 14321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x x x x ,有)1301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂span B A η ④ ⊥><⋂B A |η 易知,⇔>∈<⊥B A x |[]065 17 5 2 3 3 3 3 0 0 0 0 1 1 1 1 32=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=T TxB A B A AB B x,即 065 3 0 117 3 0 15 3 0 12 3 0 1=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x 所以)0103-0010(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⊥,span B A 同③,可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⋂⊥0000|B A η⑤ ><⋂⊥B A |η)101-1-0123(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⊥,span η同③可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂⊥0000|B A η⑥ ⊥⊥><⋂B A |η易知)0123(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=><⋂⊥⊥span B A η 综上可知,上述空间的维数加起来不等于4,故在上述空间的直和空间中不能取到状态空间的基底。