《信号与系统》第九章习题解答
信号系统(第3版)习题解答
信号系统(第3版)习题解答《信号与系统》(第3版)习题解析高等教育出版社目录第1章习题解析 (2)第2章习题解析 (6)第3章习题解析 (16)第4章习题解析 (23)第5章习题解析 (31)第6章习题解析 (41)第7章习题解析 (49)第8章习题解析 (55)第1章习题解析1-1 题1-1图示信号中,哪些是连续信号?哪些是离散信号?哪些是周期信号?哪些是非周期信号?哪些是有始信号?(c) (d)题1-1图解 (a)、(c)、(d)为连续信号;(b)为离散信号;(d)为周期信号;其余为非周期信号;(a)、(b)、(c)为有始(因果)信号。
1-2 给定题1-2图示信号f ( t ),试画出下列信号的波形。
[提示:f ( 2t )表示将f ( t )波形压缩,f (2t )表示将f ( t )波形展宽。
] (a) 2 f ( t - 2 )(b) f ( 2t )(c) f ( 2t ) (d) f ( -t +1 )题1-2图解 以上各函数的波形如图p1-2所示。
图p1-21-3 如图1-3图示,R 、L 、C 元件可以看成以电流为输入,电压为响应的简单线性系统S R 、S L 、S C ,试写出各系统响应电压与激励电流函数关系的表达式。
题1-3图解 各系统响应与输入的关系可分别表示为)()(t i R t u R R ⋅= tt i L t u L L d )(d )(= ⎰∞-=t C C i Ct u ττd )(1)(1-4 如题1-4图示系统由加法器、积分器和放大量为-a 的放大器三个子系统组成,系统属于何种联接形式?试写出该系统的微分方程。
S R S L S C题1-4图解 系统为反馈联接形式。
设加法器的输出为x ( t ),由于)()()()(t y a t f t x -+=且)()(,d )()(t y t x t t x t y '==⎰故有 )()()(t ay t f t y -='即)()()(t f t ay t y =+'1-5 已知某系统的输入f ( t )与输出y ( t )的关系为y ( t ) = | f ( t )|,试判定该系统是否为线性时不变系统?解 设T 为系统的运算子,则可以表示为)()]([)(t f t f T t y ==不失一般性,设f ( t ) = f 1( t ) + f 2( t ),则)()()]([111t y t f t f T ==)()()]([222t y t f t f T ==故有)()()()]([21t y t f t f t f T =+=显然)()()()(2121t f t f t f t f +≠+即不满足可加性,故为非线性时不变系统。
信号与系统 陈后金 第二版 课后习题答案(完整版)

(1) f (t) = 3sin 2t + 6 sinπ t
(2) f (t) = (a sin t) 2
(8)
f
(k)
=
cos⎜⎛ ⎝
πk 4
⎟⎞ ⎠
+
sin⎜⎛ ⎝
πk 8
⎟⎞ ⎠
−
2
cos⎜⎛ ⎝
πk 2
⎟⎞ ⎠
解:(1)因为 sin 2t 的周期为π ,而 sin πt 的周期为 2 。
显然,使方程
−∞
0
2-10 已知信号 f (t) 的波形如题 2-10 图所示,绘出下列信号的波形。
f (t)
2
1
−1 0
t 2
题 2-10 图
(3) f (5 − 3t) (7) f ′(t) 解:(3)将 f (t) 表示成如下的数学表达式
(5) f (t)u(1 − t)
由此得
⎧2
f
(t)
=
⎪ ⎨ ⎪ ⎩
f (t)u(1− t) 2
1
0.5
t
−1 0
1
(7)方法 1:几何法。由于 f (t) 的波形在 t = −1处有一个幅度为 2 的正跳变,所以 f ′(t) 在 此处会形成一个强度为 2 的冲激信号。同理,在 t = 0 处 f ′(t) 会形成一个强度为 1 的冲激信 号(方向向下,因为是负跳变),而在 0 < t < 2 的区间内有 f ′(t) = −0.5 (由 f (t) 的表达式可
第 1 页 共 27 页
《信号与系统》(陈后金等编)作业参考解答
(2)显然,该系统为非线性系统。 由于
T{f (t − t0 )}= Kf (t − t0 ) + f 2 (t − t0 ) = y(t − t0 )
《信号与系统》课后习题参考答案

《信号与系统》课后习题参考答案第二章 连续信号与系统的时域分析2-9、(1)解:∵系统的微分方程为:)(2)(3)(t e t r t r '=+',∴r(t)的阶数与e(t) 的阶数相等,则h(t)应包含一个)(t δ项。
又∵系统的特征方程为:03=+α,∴特征根3-=α∴)()(2)(3t u Ae t t h t -+=δ∴)]()(3[)(2)(33t e t u e A t t h t t δδ--+-+'=')()(3)(23t A t u Ae t t δδ+-'=-将)(t h 和)(t h '代入微分方程(此时e(t)= )(t δ),得:)()(3)(23t A t u Ae t t δδ+-'-+3)(2)]()(2[3t t u Ae t t δδ'=+-∴A=-6则系统的冲激响应)(6)(2)(3t u et t h t --=δ。
∴⎰⎰∞--∞--==t td ue d h t g τττδτττ)](6)(2[)()(3⎰∞-=t d ττδ)(2⎰∞---t d u e τττ)(63 )()(6)(203t u d e u t t ⎰-∞--=τττ )()3(6)(203t u e t u t --=-τ)()1(2)(23t u e t u t -+=- )(23t u e t -=则系统的阶跃响应)(2)(3t u et g t -=。
2-11、解:①求)(t r zi : ∵系统的特征方程为:0)3)(2(652=++=++αααα,∴特征根:21-=α,32-=α ∴t t zi e C eC t r 3221)(--+= (t ≥0) ②求)(t r zs :t t e A eA t h 3221)(--+= (t ≥0),可求得:11=A ,12-=A (求解过程略) ∴)()()(32t u e e t h t t ---=∴)(*)()(*)()]()[(*)()(*)()(3232t u e t u e t u e t u e t u e e t u e t h t e t r t t t t t t t zs --------=-==)()2121()()(21)()(3232t u e e e t u e e t u e e t t t t t t t -------+-=---= ③求)(t r :)(t r =)(t r zi +)(t r zs ++=--)(3221t te C e C )2121(32t t t e e e ---+- t tt e C e C e 3221)21()1(21---++-+= (t ≥0) ∵)()(t u Ce t r t -=,21=C 21=C ∴ 011=-C , ∴ 11=C0212=+C 212-=C ∴=-)0(r 21211)0(21=-=+=+C C r zi , ='-)0(r 2123232)0(21-=+-=--='+C C r zi 2-12、解:(1)依题意,得:)(2)(*)()(t u e t h t u t r tzi -=+)()()(t t h t r zi δ=+∴)(2)]()([*)()(t u e t r t t u t r t zi zi -=-+δ)(2)()()()1(t u e t r t u t r t zi zi --=-+∴)()12()()()1(t u e t r t r t zi zi -=---,两边求导得:)()12()(2)()(t e t u e t r t r t t zi ziδ-+-=-'-- )(2)()()(t u e t t r t r t zi zi--=-'δ ∴)(11)(112)()()1(t p p t p t t r p zi δδδ+-=+-=- ∴)()(11)(t u e t p t r t zi -=+=δ (2)∵系统的起始状态保持不变,∴)()(t u e t r t zi -=∵)()()(t t h t r zi δ=+,∴)()()(t u e t t h t--=δ∴)]()([*)()()(*)()()(33t u e t t u e t u e t h t e t r t r t t t zi ----+=+=δ )()()(t u te t u e t u e tt t ----+=)()2(t u e t t --= 2-16、证:∑∑∞-∞=--∞-∞=--=-=k k t k t k t u e k t t u e t r )3()3(*)()()3(δ∑∞-∞=--=k k t k t u e e )3(3 ∵当t-3k>0即3t k <时:u(t-3k)为非零值 又∵0≤t ≤3,∴k 取负整数,则:3003311)(---∞=∞=----===∑∑e e e e e et r t k k k t k t 则t Ae t r -=)(,且311--=e A 。
(完整版)信号与系统练习及答案
信号与系统练习及答案一、单项选择题1.已知信号f (t )的波形如题1图所示,则f (t )的表达式为( )A .tu(t)B .(t-1)u(t-1)C .tu(t-1)D .2(t-1)u(t-1)2.积分式⎰-δ+δ++4422)]dt -(t 2(t))[23(t t 的积分结果是( ) A .14 B .24 C .26 D .283.已知f(t)的波形如题3(a )图所示,则f (5-2t)的波形为( )4.周期矩形脉冲的谱线间隔与( )A .脉冲幅度有关B .脉冲宽度有关C .脉冲周期有关D .周期和脉冲宽度有关 5.若矩形脉冲信号的宽度加宽,则它的频谱带宽( ) A .不变 B .变窄 C .变宽D .与脉冲宽度无关 6.如果两个信号分别通过系统函数为H (j ω)的系统后,得到相同的响应,那么这两个信号()A .一定相同 B .一定不同 C .只能为零 D .可以不同7.f(t)=)(t u e t 的拉氏变换为F (s )=11-s ,且收敛域为( ) A .Re[s]>0B .Re[s]<0C .Re[s]>1D .Re[s]<1 8.函数⎰-∞-δ=2t dx )x ()t (f 的单边拉氏变换F (s )等于( ) A .1 B .s 1 C .e -2s D .s1e -2s 9.单边拉氏变换F (s )=22++-s e )s (的原函数f(t)等于( ) A .e -2t u(t-1) B .e -2(t-1)u(t-1) C .e -2t u(t-2)D .e -2(t-2)u(t-2)答案: BCCCBDCDA二.填空题1.如果一线性时不变系统的单位冲激响应为h(t),则该系统的阶跃响应g(t)为_________。
2.已知x(t)的傅里叶变换为X (j ω),那么x (t-t 0)的傅里叶变换为_________________。
3.如果一线性时不变系统的输入为f(t),零状态响应为y f (t )=2f (t-t 0),则该系统的单位冲激响应h(t)为_________________。
信号与系统(带答案)

第一套第1题,下列信号的分类方法不正确的是(A)A、数字信号和离散信号B、确定信号和随机信号C、周期信号和非周期信号:D、因果信号与反因果信号第2题,以下信号属于连续信号的是(B)A、e-nTB、e-at sin(ωt)C、cos(nπ)D、sin(nω0)第3题,下列说法正确的是(D)A、两个周期信号x(t),y(t)的和x(t)+y(t)一定是周期信号。
B、两个周期信号x(t),y(t)的周期分别为2和2开根号,其和信号x(t)+y(t)是周期信号。
C、两个周期信号x(t),y(t)的周期分别为2和Pi,其和信号x(t)+y(t)是周期信号。
D、两个周期信号x(t),y(t)的周期分别为2和3,其和信号x(t)+y(t)是周期信号。
第4题,将信号f(t)变换为( A ) 称为对信号f(t)的平移或移位。
A、f(t-t0)B、f( k -k0)C、f(at)D、f(-t)第五题,下列基本单元属于数乘器的是(A )A、B、C、D、第六题、下列傅里叶变换错误的是(D)А.1<-->2πδ(ω)B.ejω0t<-- > 2πδ(ω-ω0 )С.соѕ(ω0t) < -- > π[δ(ω-ω0 ) +δ (ω+ω0 )]D. ѕіn(ω0t)<-> jπ[δ(ω+ω0)+ δ(ω- ω0)]第7题、奇谐函数只含有基波和奇次谐波的正弦和余弦项,不会包含偶次谐波项。
(对)第8题、在奇函数的傅里叶级数中不会含有正弦项,只可能含有直流项和余弦项。
(错)第9题、满足均匀性和____条件的系统称为线性系统。
(叠加性)第10题.根据激励信号和内部状态的不同,系统响应可分为零输入响应和__响应(零状态)第二套1、当周期信号的周期增大时,频谱图中谱线的间隔( C)A:增大B:无法回答C:减小D:不变2、δ(t)的傅立叶变换为( A)。
A:1B: u(t)C: 0D:不存在3、已知f(t),为求f(3-2t)则下列运算正确的是(B)A:f(-2t)左移3/2B:f(-2t)右移3/2C:f(2t)左移3D:f(2t)右移3 ,4、下列说法不正确的是(D)。
信号与系统课后习题答案
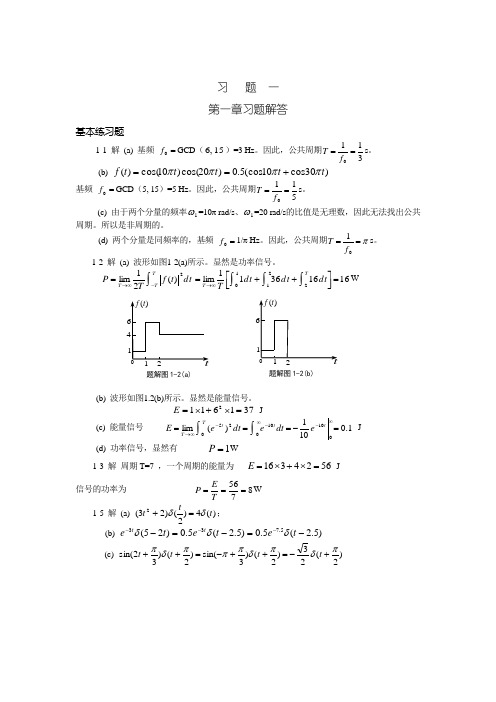
习 题 一 第一章习题解答基本练习题1-1 解 (a) 基频 =0f GCD (15,6)=3 Hz 。
因此,公共周期3110==f T s 。
(b) )30cos 10(cos 5.0)20cos()10cos()(t t t t t f ππππ+==基频 =0f GCD (5, 15)=5 Hz 。
因此,公共周期5110==f T s 。
(c) 由于两个分量的频率1ω=10π rad/s 、1ω=20 rad/s 的比值是无理数,因此无法找出公共周期。
所以是非周期的。
(d) 两个分量是同频率的,基频 =0f 1/π Hz 。
因此,公共周期π==01f T s 。
1-2 解 (a) 波形如图1-2(a)所示。
显然是功率信号。
t d t f TP T TT ⎰-∞→=2)(21lim16163611lim 22110=⎥⎦⎤⎢⎣⎡++=⎰⎰⎰∞→t d t d t d T T T W(b) 波形如图1.2(b)所示。
显然是能量信号。
3716112=⨯+⨯=E J (c) 能量信号 1.0101)(lim101025=-===⎰⎰∞∞---∞→T t ttT e dt edt eE J(d) 功率信号,显然有 1=P W1-3 解 周期T=7 ,一个周期的能量为 5624316=⨯+⨯=E J 信号的功率为 8756===T E P W 1-5 解 (a) )(4)2()23(2t tt δδ=+; (b) )5.2(5.0)5.2(5.0)25(5.733-=-=----t e t e t et tδδδ(c) )2(23)2()3sin()2()32sin(πδπδπππδπ+-=++-=++t t t t 题解图1-2(a) 21题解图1-2(b) 21(d) )3()3()(1)2(-=----t e t t et δδε。
1-6 解 (a) 5)3()94()3()4(2-=+-=+-⎰⎰∞∞-∞∞-dt t dt t t δδ(b) 0)4()4(632=+-⎰-dt t t δ(c) 2)]2(2)4(10[)]42(2)4()[6(63632=+++-=+++-⎰⎰--dt t t dt t t t δδδδ(d)3)3(3)(3sin )(1010=⋅=⎰⎰∞-∞-dt t Sa t dt ttt δδ。
信号与系统课后习题答案汇总
第一章习题参考解答1.1 绘出下列函数波形草图。
(1) ||3)(t et x -=(2) ()⎪⎪⎨⎧<≥=02021)(n n n x n n (3) )(2sin )(t t tx επ= (5) )]4()([4cos )(--=-t t t et x tεεπ(7) t t t t x 2cos)]2()([)(πδδ--=(9) )2()1(2)()(-+--=t t t t x εεε)5- (11) )]1()1([)(--+=t t dtdt x εε (12) )()5()(n n n x --+-=εε (13) ⎰∞--=td t x ττδ)1()((14) )()(n n n x --=ε1.2 确定下列信号的能量和功率,并指出是能量信号还是功率信号,或两者均不是。
(1) ||3)(t et x -=解 能量有限信号。
信号能量为:(2) ()⎪⎩⎪⎨⎧<≥=02021)(n n n x n n解 能量有限信号。
信号能量为:(3) t t x π2sin )(=解 功率有限信号。
周期信号在(∞-∞,)区间上的平均功率等于在一个周期内的平均功率,t π2sin 的周期为1。
(4) n n x 4sin)(π=解 功率有限信号。
n 4sin π是周期序列,周期为8。
(5) )(2sin )(t t t x επ=解 功率有限信号。
由题(3)知,在),(∞-∞区间上t π2sin 的功率为1/2,因此)(2sin t t επ在),(∞-∞区间上的功率为1/4。
如果考察)(2sin t t επ在),0(∞区间上的功率,其功率为1/2。
(6) )(4sin)(n n n x επ=解 功率有限信号。
由题(4)知,在),(∞-∞区间上n 4sin π的功率为1/2,因此)(4sinn n επ在),(∞-∞区间上的功率为1/4。
如果考察)(4sinn n επ在),0(∞区间上的功率,其功率为1/2。
信号系统教材课后习题答案
第6章 系统及系统的时域分析1. 解:由于系统(1)不满足分解性;系统(2)不满足零输入线性;系统(3)不满足零状态线性,故这三个系统都不是线性系统。
对于系统(4),如果直接观察)(n y ~)(n f 关系,似乎系统既不满足齐次性,也不满足叠加性。
但考虑到令)(n f =0时,系统响应为常数b ,若把它看成是由初始状态引起的零输入响应时,系统仍是满足线性系统条件的,故系统(4)是线性系统。
2. 解:(1) 已知)(t f →)](cos[)(t f a t y f =,设 dd t t t t f t f >-=),()(1,则其零状态响应为)](cos[)](cos[)(11d f t t f a t f a t y -==,显然 )()(1d f f t t y t y -=,故该系统是时不变系统。
(2) 已知)(n f →)()(n bf n y f =,设01),()(n n n n f n f >-=,则其零状态响应为)()()(011n n bf n bf n y f -==,显然 )()(01n n y n y f f -=,故该系统是时不变系统。
3. 解:对于(1)~(4),由于任一时刻的零状态响应均与该时刻以后的输入无关,因此都是因果系统。
而对于(5),系统任一时刻的零状态响应都与该时刻以后的激励有关。
响应在先,激励在后,这在物理系统中是不可能的。
因此,该系统是非因果的。
(6)也是非因果的,因为如果0)(=t f ,0t t < 则有 0)3()(==t f t y f ,3t t <可见在区间003t t t <<上0)(≠t y f ,即零状态出现于激励之前,因而该系统是非因果的。
4. 解:(1)显然,无论激励)(n f 是何种形式的序列,只要它是有界的,那么)(n y f 也是有界的,因果该系统是稳定的。
(2)若)()(t u t f =,显然该激励是有界的,但 t x x u t y tf ==⎰∞-d )()(,0≥t它随时间t 无限增长,故该系统是不稳定的。
奥本海姆《信号与系统(第二版)》习题参考答案.
信号与系统课后习题参考答案
信号与系统课后习题参考答案1试分别指出以下波形就是属于哪种信号?题图1-11-2试写出题1-1图中信号得函数表达式。
1-3已知信号与波形如题图1-3中所⽰,试作出下列各信号得波形图,并加以标注。
题图1-3⑴⑵⑶⑷⑸⑹⑺⑻⑼1-4已知信号与波形如题图1-4中所⽰,试作出下列各信号得波形图,并加以标注。
题图1-4⑴⑵⑶⑷⑸⑹⑺⑻⑼1-5已知信号得波形如题图1-5所⽰,试作出信号得波形图,并加以标注。
题图1-51-6试画出下列信号得波形图:⑴⑵⑶⑷1-7试画出下列信号得波形图:⑴⑵⑶⑷⑸⑹1-8试求出以下复变函数得模与幅⾓,并画出模与幅⾓得波形图。
⑴⑵⑶⑷1-9已知信号,求出下列信号,并画出它们得波形图。
1-10试作出下列波形得奇分量、偶分量与⾮零区间上得平均分量与交流分量。
题图1-101-11试求下列积分:⑴⑵⑶⑷⑸⑹1-12试求下列积分:⑴⑵⑴(均为常数)⑵⑶⑷⑸⑹⑺⑻1-14如题图1-14中已知⼀线性时不变系统当输⼊为时,响应为。
试做出当输⼊为时,响应得波形图。
题图1-14 1-15已知系统得信号流图如下,试写出各⾃系统得输⼊输出⽅程。
题图1-151-16已知系统⽅程如下,试分别画出她们得系统模拟框图。
⑴⑵⑶1-17已知⼀线性时不变系统⽆起始储能,当输⼊信号时,响应,试求出输⼊分别为与时得系统响应。
第⼆章习题2-1试计算下列各对信号得卷积积分:。
⑴(对与两种情况)⑵⑶⑷⑸⑹2-2试计算下列各对信号得卷积与:。
⑴(对与两种情况)⑵⑶⑷⑸⑹2-3试计算下图中各对信号得卷积积分:,并作出结果得图形。
题图2-32-4试计算下图中各对信号得卷积与:,并作出结果得图形。
题图2-42-5已知,试求:⑴⑵⑶2-7系统如题图2-7所⽰,试求系统得单位冲激响应。
已知其中各⼦系统得单位冲激响应分别为:题图2-72-8设已知LTI 系统得单位冲激响应,试求在激励作⽤下得零状态响应。
2-9⼀LTI 系统如题图2-9所⽰,由三个因果LTI ⼦系统级联⽽成,且已知系统得单位样值响应如图中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
shown in Figure 1. (a) Determine the system function of the system, is this system causal? (b) Determine the unit impulse response of this system. (c) If the input is x ( t ) = u ( − t ) , determine the output y ( t ) . (d) Draw a block diagram representation of this system.
17
Chapter 9
例:某连续时间 LTI 系统的系统函数为 H ( s ) =
Problem Solution
s +1 为常数。 ,其中 a, b 为常数。已知系统函 2 s + as + b
t
数 在 s = −2 有 一 个 极 点 , 且 输 入 为 x ( t ) = e , − ∞ < t < +∞ 时 , 系 统 的 输 出
Problem Solution
y′′(t ) − y′(t ) − 2 y (t ) = x(t )
(b) Determine h(t ) for each of the following cases: −1/ 3 1/ 3 1 1 H (s ) = 2 = = + s − s − 2 (s + 1)(s − 2 ) s + 1 s − 2 1. The system is stable. 1 −t 1 2t h(t ) = − e u (t ) − e u (− t ) − 1 < Re{s} < 2 3 3 2. The system is causal. 1 −t 1 2t h(t ) = − e u (t ) + e u (t ) Re{s} > 2 3 3 3. The system is neither stable nor causal.
x(t )
Problem Solution
h(t )
y (t ) Y (s )
X (s )
H (s )
(c) If x(t ) = e3t , − ∞ < t < +∞ , determine the output y (t ) .
H ( s) =
y(t) =
Y ( s)
X ( s)
=
( s + 1) ( s + 2 )
Homework: 9.2 9.5 9.7 9.8 9.9 9.13 9.21(a,b,i,j)
9.22(a,b,c,d) 9.28 9.31 9.32 9.33 9.35 9.45
1
Chapter 9
Problem Solution
9.7 How many signals have a Laplace transform that may be s −1 expressed as
Re { s} > −1
y′′ ( t ) + 2 y′ ( t ) + y ( t ) = x′′ ( t ) − 2 x ′ ( t ) − x ( t )
This system is stable.
11
Chapter 9 9.45 An LTI system: s+2 X (s ) = x(t ) = 0 , t > 0 s−2 2 1 y (t ) = − e 2t u (− t ) + e −t u (t ) 3 3 (a) Determine H (s ) and its ROC. (b) Determine h(t ) .
x(t ) is two sided.
3
Chapter 9 9.21 Determine the Laplace transform.
Problem Solution
( b ) x ( t ) = e −4 t u ( t ) + e −5 t ( sin 5t ) u ( t )
X ( s) =
6
因果稳定LTI系统给出如下信息:⑴ H ( s) 1 ; 系统给出如下信息: 因果稳定 系统给出如下信息 s=1
d 2h( t ) dh( t ) 输出不是绝对可积的; 输出不是绝对可积的;⑷信号 +3 + 2h( t ) 2 dt dt 是有限持续期的; 在无穷远点只有一阶零点。 是有限持续期的;⑸ H(s)在无穷远点只有一阶零点。
Problem Solution
Consider a stable LTI system with input x ( t ) = 2 and output
y ( t ) = 4 / 3 . Suppose the rational system function has the pole-pattern
输出是绝对可积的; ⑵当输入为 u( t ) 时,输出是绝对可积的;⑶当输入为 tu( t )时,
1. 试确定 H(s) ,画出其零极点图并标注收敛域; 画出其零极点图并标注收敛域; 2. 试求系统的单位冲激响应 h(t ) ; 3. 若输入 x ( t ) = e2t , −∞< t < +∞ ,试求系统的输出 y ( t ) ; 4. 写出描述该系统的常系数微分方程; 写出描述该系统的常系数微分方程; 5. 画出该系统的模拟框图。 画出该系统的模拟框图。
2
Chapter 9
Problem Solution
9.8 Let x(t ) be a signal that has a rational Laplace transform with exactly two poles,located at s = -1 and s = -3. If g (t ) = e 2t x(t ) and G ( jω ) convergence,determine whether x(t ) is left sided, right sided,or two sided.
(s + 2)(s + 3)(s 2 + s + 1)
in its region of convergence?
jω
Poles :
−
1 3 + j 2 2
s1 = −2, s1 = −3, s3, 4
1 3 =− ± j 2 2
−3 −2
− 1 3 − j 2 2
σ
There are four signals.
−2 ( s + 1 )
2 t 2 −t 4 −t y ( t ) = + e u ( − t ) + e ( cos t ) u ( t ) + e ( sin t ) u ( t ) 5 5 5
9
Chapter 9
Problem Solution
9.35 Consider a causal LTI system with the input x(t ) and output y (t ) . (b) Is this system stable?
Re{s} < −1
1 1 h(t ) = + e −t u (− t ) − e 2t u (− t ) 3 3
7
Chapter 9 9.32 Consider a causal LTI system ,
1. x(t ) = e
2t
Problem Solution
dh(t ) 2. + 2h(t ) = e −4t u (t ) + bu (t ) dt
x(t ) = e
−t
Problem Solution
s +1 s 2 + 2s + 2
, − ∞ < t < +∞
Determine the response y (t )
Y ( s) = X ( s) H ( s) =
( s + 1) ( s − 1) ( s 2 + 2 s + 2 )
−1 < Re { s} < 1
x(t )
(a) Determine a differential equation relating y (t )and x(t )
L1 -2
1 s
y (t )
-1
1 s
L2 -1
-6
10
Chapter 9
Problem Solution
s2 − 2s − 1 H ( s) = 2 s + 2s + 1
−2
②
−1
③
1
④
2
σ
① Re{s} < −2 anticausal , unstable ② -2 < Re{s} < −1 noncausal , unstable
③ -1 < Re{s} < 1
noncausal , stable Causal , unstable
6
④ Re{s} > 1
Chapter 9 9.31 Consider a continuous-time LTI system (a) Determine H (s ) .
jω
σ
−3
−2
−1
14
Chapter 9
Problem Solution
(a)
s+2 H ( s) = ( s + 1) ( s + 3 )
stable ⇒ Re { s} > −1 ⇒ causal
(b)
1 −t h ( t ) = ( e + e −3 t ) u ( t ) 2