凸轮机构五自由度模型动力学分析及计算机动态模拟
凸轮机构的弹性动力学

凸轮机构的弹性动力学分析(附MATLAB 代码)【问题】已知一凸轮系统,欲使其考虑弹性因素后从动件的真实运动规律按照余弦加速度运动规律运动,建立该凸轮系统的弹性动力学模型,分析其未考虑弹性因素时从动件的运动规律,并绘制出从动件的理论运动规律及考虑弹性因素后的真实运动规律。
凸轮系统的运动及动力参数自定。
程序代码需提供电子版,并说明运行环境。
【解答】一、建立动力学模型取图1所示的凸轮机构为研究对象,图2为其所对应的动力学模型。
图1:凸轮机构运动简图 图2:凸轮机构的动力学模型为使得问题简化,力学模型中忽略了凸轮轴的扭转变形、弯曲变形以及回位弹簧的阻尼作用。
图2中k 为系统等效弹簧的刚度,c 为凸轮机构从动组件的阻尼系数,h k 为回位弹簧的刚度,0F 为回位弹簧的预紧力,M 为凸轮机构在从动件侧的当量质量,x 为与凸轮廓线有关的等效凸轮升程(图中所示的凸轮并非真正的凸轮,其廓线对应的升程与真实凸轮廓线对应的升程0x 具备关系0rx x ,其中r 为摇臂比。
因为x 与0x 仅相差一个比例系数r ,为了便于叙述,后文将只注重分析x 与从动件输出的关系,而不再专门区别x 与0x 的差异),y 为从动件的实际升程。
二、建立动力学方程该机构的自由度为1,利用牛顿第二定律建立运动微分方程:)cos 1(2ϕ-=hy 022)()(F y k dtdxdt dy c x y k dt y d M h ------= (式1)设凸轮转动的角速度为ω,它与时间微分dt 、凸轮转角微分ϕd 具有关系:ωϕd dt =(式2)将(式2)代入(式1)并整理可得:0222)(F kx d dx c y k k d dy c d y d M h -+=+++ϕωϕωϕω (式3) 微分方程(式3)有两层含义:①若已知从动件的真实运动规律,可求解出凸轮在高速运转条件下考虑弹性变形影响的理论轮廓;②若已知凸轮廓线,可求解考虑弹性变形的从动件的动力学响应。
5自由度机械手动力学分析与仿真
摘
要: 针对 5 自由度机械手 , 基于 L gag arne方程建 ̄ T5 自由度机 械手的动力学模型 , 通过 Sl w rs o d ok i
建立实体仿真模 型 , 且通 过 C s t n进行 了动力学仿真 , 出了各关节力矩和 时间的关系 曲线 , 并 oMo o i 得 分 析了机 械手各 关节在不同角速度下对各关节力矩 的影响 , 这对改 善机械手 的设计提供 了帮助 , 并为机
收稿 日期 :0 2 0 — 6 2 1— 3 1
换矩阵矩 阵如下 :
nA
= 】
( 1 )
式 中 , 为坐标 变换矩 阵 ,为第i 自由度的齐次 个
作者简 介: 程远(9 3 )男 , 17 一 , 江苏无锡人 , 讲师 , 硕士 , 研究方 向: 机械手及 自动化设备 。
第2 8卷 第 8 期
21 0 2年 8 月
科 技 通 报
BUL ET N CI NC L I 0F S E E AND E T CHNOL Y OG
Vo .8 1 No 8 2 .
Aug 2 2 . 01
5 自由度机械手动力学分析 与仿真
程 远
f 无锡职业技术学 院 机 电技术学 院, 江苏 无锡 2 4 2 ) 1 1 1
o r e o t l a a ae . fd v n c nr y h sb s d i ol
Ke r :m a i l tr yn mi nay i i a in y wo ds npu ao ;d a c a lsssmulto
本文针对本校研究所 为配合学校教学工作而开发
5 自由度依 次为腰部 回转 、 个 下臂俯 仰 、 上臂俯仰 图2 所示 。
五自由度混联机器人优化设计与运动学分析
0 引 言
农业 机器人技 术是 当今 国际农业机械 化研 究的前沿 领域 ,近年来 随着 新型农业 的发展及新技 术 的开发 ,农 业机器 人 已经得 到 了广泛 的应 用 ,如插秧 、耕作 、果蔬 采摘 、伐木 、筛种 、产品包装机器人等 f I 4 】 。农业 生产的 多样 性及 农业作业 的复杂性 等特点对农业 机器人 的先进 性及实用性提 出了较高的要求 。 农业机器 人不再仅仅 局 限于传 统的 串联机 构 ,农业 生产方式 也走 向多样 化市场 ,其 中专 门用 于农 业领域 的 并联机器人具有较 高的研 究价值 一 】 。并联机构与 串联机 构相 比具有结构 紧凑,刚度高 ,承载 能力大等优 点,使得 并联机器人在某些农业领域有着较高地位和应用价值[ 8 - 9 ] 。
Zh a n g Do n g s h e n g , Xu Y u n d o u , Ho u Zh a o we i , Y a o J i a n t a o , Z h a o Yo n g s h e n g . Op t i ma l d e s i g n a n d k i n e ma t i c s a n a l y s i s o f 5 一 DOF
制的两移一转运动冗余平面并联机构 ,该并联机 构任意位置的转轴均为相互平行 的连续转 轴,使其具备 良好的灵活性 。 基 于此平面并联机构 ,构造 出了多种五 自由度混联机 器人 ,首先建立 了五 自由度混联机器人 的运动 学模 型,并对 其进行
了奇异分析,给出 了减少机构奇异位型 的条件 ;然后基 于灵活性指标,对并联机构进行 了尺寸优化 ,绘 制了用于选取结 构尺 寸的性能图谱 ,且借助有 限元 软件对基 于优 化所得结构尺寸绘制 的具有运动冗余特性 的平面机 构进行 了结构拓扑优 化, ,完成 了整体结构优化前后的静力学分析与对 比,结果显示优 化前后整 体变 形仅 增大 0 . 5 1 %,优化前后机构优化部分
基于ADAMS的凸轮机构设计及运动仿真分析_徐芳

!!!!!!!!!!!!!!"
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!" 【摘 要】 用大型运动学和动力学分析软件 ADAMS 完成尖顶直动从动件盘形凸轮机构设计和 !!!!!!!!!!!!!!"
实体造型 , 并对其进行运动分析和仿真 , 缩短了凸轮的设计周期并提高了设计质量 , 为凸轮机构的设 计分析提供一种有效的新方法。 关键词 : ADAMS ; 凸轮机构 ; 运动仿真 【Abstr act】 The design and modeling of dish cam with straight moving follower is given by the kinetics
转副之上创建一个每秒钟逆时钟旋转 360 度的旋转驱动。 这样 , 一个完整的凸轮机构仿真模型建立起来 , 如图 4 所示 , 从而可以 进行下一步的运动仿真分析。
20* (1 - cos (6/5*360d*time)),40,IF(time - 7/12:40,40,IF (time - 11/12: 40* (2.75 - 3*time +1/(2*pi)*sin (3*2*pi*time - 3.5*pi)),0,IF (time - 1: 0,0,0))))" 。
在模型上施加一定的运动约束副、 力或力矩的运动激仿真实例分析
利用 ADAMS 进行凸轮机构设计仿真的过程大致可分为凸 轮机构几何建模、 施加约束和载荷、 凸轮机构样机模型检验和 仿真结果后处理、 仿真结果比较分析, 多次仿真及优化设计等
2.1 已知条件
已知尖顶直动从动件盘形凸轮机构的凸 轮 基 圆 半 径 r0=60, 从动件行程 h=40, 推程运动角为 !0=150!, 远休止角 !s=60!, 回程运 动 角 !0' =120!, 近 休 止 角 为 !s' =30! ; 从 动 件 推 程 、 回程分别采用余 弦加速度和正弦加速度运动规律, 对该凸轮机构进行模拟仿 真 , 各阶段的运动规律如下 : ( 1) 从动件推程 运 动 方 程 。 推 程 段 采 用 余 弦 加 速 度 运 动 规 律 , 故将已知条件 !0=150!=5!/6 、 h=40mm 代入余弦加 速 度 运 动 规律的推程段方程式中 , 推演得到 :
汽车五自由度建模
汽车振动大作业一、汽车悬架系统振动模型汽车是一个复杂的振动系统,在振动分析的建模过程当中,要根据所分析的问题对汽车进行简化,建立相应的模型。
现在考虑汽车车身悬架的五自由度模型,如下图1所示,该模型主要考虑左右车辙的不平度差异和较小的轮胎阻尼而得到的,该模型中主要有车身的垂直、俯仰两个自由度和前后车轴质量两个垂直自由度,汽车座椅一个垂直自由度,系统共五个自由度,其中车身质量的垂直、俯仰两个自由度的振动对系统平顺性的影响较大,假设车身是具有垂直和俯仰两个自由度的刚体,其车身的质量和转动惯量分别为:h h I m 和,前后车轮质量、悬架参数和轮胎刚度的符合前加入了分别表示前(front)和后(rear)的下标“f ”和“r ”,如图1示:I(h) m2m(f)m(r)Z(b)abz4z5F(f)F(r)z2z3m1z1k1k2k3k4k5c1c2c3c4c5d图1 五自由度汽车悬架系统图1中:1z 表示前轮转动位移自由度;2z 表示车体垂直位移自由度;3z 1z 表示后轮转动位移自由度;4z 俯仰转动位移自由度;5z 表示驾驶员座椅垂向自由度;1m 表示驾驶员座椅质量;2m 表示车体质量;3)(m f m =表示前轮质量;4)(m r m =表示后轮质量;1k 表示座椅弹簧刚度;5,4,3,2k k k k 悬架弹簧刚度;1c 表示座椅弹簧阻尼;5,4,3,2c c c c 表示悬架弹簧阻尼;a 表示车身质心至前轴距离;b 车身质心至后轴距离,)(),(r F f F 分别为前后轮随机激励力。
二、运动微分方程由图1可得到下述理论值: (1) 系统的动能为:)(212121212121325125524423222211I m z m z m z m z I z m z m T i i i ==++++=∑= (1-2)(2) 系统的势能为:255244232532324223121))((21))((21)(21)(21)(21r F z k f F z k bz z z k az z z k dz z z k V -+-++-++-++-=(1-3)(3) 系统阻尼耗散的能量:55554454332353325332224232423111213121))(())(())(())(())((z c r F z c z c f F zc z bc z c z c z b z zc z dc z c z c z b z zc z dc z c z c zd z zc C ----+-+--+-+--+-+--= (1-4)由拉格朗日运动方程:)5,,2,1(0)()( ==-∂∂+∂∂-∂∂i F z Vz T z T dt d Qi ii i可得到多自由度的运动微分方程:)()()()(t F t Kz t z C t zM =++ 式中:⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=543210000000000000000000m m m m m M ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+-+---++-------++---=533343223232221232113232132111110000c c bc c c c ac c bc ac c b c a c d bc ac dc dc c c bc ac dc c c c c dc c c C⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+-+---++-------++---=5333422232322212321132321321111100000k k ak k k k ak k bk ak k c k a k d bk ak dk dk k k bk ak dk k k k k dk k k K表一 汽车结构参数汽车结构参数数值1m —驾驶员座椅质量kg 65 2m —车体质量kg 7084m —右前、左前轮胎质量 kg 80 5m —左后、右后轮胎质量kg 80)(h I —转动惯量 21060m kg ⋅1k —座椅弹簧刚度m N /23071 32,k k —右前、左前悬架弹簧刚度 m N /20292 54,k k —左后、右后悬架弹簧刚度m N /128701c —座椅弹簧阻尼11500-⋅⋅m s N5432,,,c c c c —悬架弹簧阻尼11000-⋅⋅m s Na —车身质心至前轴距离m 5.1 b —车身质心至后轴距离m 75.0d -座椅到质心距离m 1875.0取汽车结构参数如表一所示,则可求得系统的质量矩阵,阻尼矩阵,刚度矩阵分别为:⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=800000080000001060000007080000065M⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡----------=14808602898919326001490521521920292028989152195570939882432619326202923988262689230710043262029223071K⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡----------=100001500100000100075010000150075023.286575.46825.2811000100075.468350015000025.28115001500C由特征方程0)(2=Φ-M K ω求得固有频率与振型。
五自由度机械手臂功能原理设计与仿真

1 引言目前在我国林果产业快速发展的同时,林果种植机械化水平较发达国家相比还很落后。
林果产业生产环节的修枝、植保、施肥、采摘等机械作业难题较突出。
其中果园喷施农药80%是依靠人力完成,剪枝机械化作业几乎为零,劳动强度非常大,而发达国家喷施农药机械化率已达95%,剪枝机械化作业率为100%,所以农民迫切需要解决林果生产环节机械化作业水平低、劳动强度大、人工作业成本高、作业质量差等问题。
国内在农业机器人方面的研究始于20 世纪90 年代中期, 相对于发达国家起步较晚。
但不少院校、研究所都在进行采摘机器人和智能农业机械相关的研究。
我国是一个农、林业大国,实现农林机械化生产的意义重大。
油茶树因其种子可榨油(茶油)供食用,故名油茶。
茶油色清味香,营养丰富,耐贮藏,是优质的食用油,也可作为润滑油、防锈油用于工业。
茶饼既是农药,又是肥料,可提高农田蓄水能力和防治稻田害虫。
果皮是提制栲胶的原料。
叶部含有花黄素、茶碱等,是医药工业的原料。
具有很高的经济效益。
目前油茶果树的采摘主要是依靠人力,这大大增加了果农的负担,而且人工采摘的效率低下,油茶果的采摘期大概有一个月左右,对于大面积种植油茶果树的果农来说,油茶果的采摘,就成了一个让人头疼的问题。
对于林果采摘机械手臂的研究不仅是和国际接轨的要求,更是国内市场的强烈需求。
本课题试图运用功能原理的求解方法,发散思维,创新结构设计,并通过计算机仿真软件对最终方案进行虚拟样机仿真研究,根据机械运动系统方案建立仿真用虚拟样机三维装配模型,仔细研究其约束条件、和初始输入数据,在成熟的虚拟样机系统中进行运动学和动力学仿真,检验方案的可行性,并查找方案的潜在问题加以修正,直到得到较满意的结果。
2 设计要求与计划2.1设计要求2.1.1 功能性要求机械臂要能够采摘树冠尺寸直径为3米,高3.5米以内的所有油茶树上的油茶果实(直径约 4.5cm),其运动要灵活自如,响应要快同时稳定性要好。
《五自由度并联驱动机构动力学及控制研究》范文

《五自由度并联驱动机构动力学及控制研究》篇一一、引言五自由度并联驱动机构(5-DOF Parallel Drive Mechanism,简称5-DOF PDM)是一种广泛应用于机器人技术、精密制造和自动化生产线的复杂机械系统。
该机构通过多个驱动器并行驱动,实现多方向、多自由度的运动。
然而,由于该机构的结构复杂性和多变量耦合性,其动力学特性和控制策略的研究显得尤为重要。
本文旨在深入探讨五自由度并联驱动机构的动力学特性和控制策略,为相关领域的研究和应用提供理论支持。
二、五自由度并联驱动机构动力学研究(一)动力学模型建立五自由度并联驱动机构的动力学模型主要考虑机构运动过程中的力、力矩、惯量、摩擦等因素。
通过分析机构的运动规律和驱动器的驱动特性,建立动力学模型。
该模型应能准确反映机构在各种工况下的运动特性和受力情况,为后续的控制系统设计和优化提供基础。
(二)动力学特性分析在建立动力学模型的基础上,对五自由度并联驱动机构的动力学特性进行分析。
主要包括机构的刚度、阻尼、惯性等特性,以及这些特性对机构运动的影响。
通过分析机构的动态响应和稳定性,为控制系统的设计和优化提供指导。
三、五自由度并联驱动机构控制策略研究(一)控制系统设计根据五自由度并联驱动机构的动力学特性和应用需求,设计合理的控制系统。
控制系统应具备高精度、高稳定性、高响应速度等特点,以实现对机构的高效控制和优化。
在控制系统设计中,应充分考虑机构的复杂性、多变量耦合性和非线性等因素,采用先进的控制算法和优化方法。
(二)控制策略研究针对五自由度并联驱动机构的控制策略,本文提出了一种基于模糊控制的控制策略。
该策略通过引入模糊逻辑,实现对机构运动的智能控制和优化。
通过分析机构的运动规律和工况变化,建立模糊规则库,实现对机构的精确控制和优化。
同时,该策略还具有较好的鲁棒性和适应性,能够适应不同工况下的机构运动需求。
四、实验验证与分析为了验证五自由度并联驱动机构的动力学特性和控制策略的有效性,本文进行了实验验证和分析。
基于Adams的凸轮机构运动仿真教程
基于Adams的凸轮机构运动仿真教程基于adams的凸轮机构运动仿真摘要:虚拟样机技术是⼀种崭新的产品开发技术,其中ADAMS软件是⽬前最著名的虚拟样机分析软件之⼀。
本⽂阐述了虚拟样机技术和ADAMS软件的特点及其应⽤,以凸轮机构为研究对象,对其进⾏动⼒学分析。
主要运⽤我们学习过的机械原理等理论知识对机构进⾏运动学和动⼒学的相关理论计算;利⽤ADAMS软件在图形显⽰⽅⾯的优势,采⽤其基本模块ADAMS/View(界⾯模块)进⾏⼀系列建模、运动分析和动态模拟仿真⼯作,验证模型的正确性,并对机构在整个周期内的可⾏性进⾏计算分析,记录相应信息,输出所需要的位置、速度、加速度等曲线与理论结果⽐较,充分展现虚拟样机技术的优越性,为虚拟样机技术的深⼊研究打下基础。
关键词:ADAMS;凸轮机构;运动学分析;仿真引⾔凸轮机构的应⽤⼗分⼴泛,在⽣产机械中应⽤凸轮机构可以较容易的实现不同的⼯作要求。
特别是实现间歇式的运动过程!但是,⽬前对于该类模型的动态仿真很少。
本例主要就推程、回程等要求进⾏预设。
⼒图通过adams实现对该凸轮机构的构建以及后续的仿真,并尝试进⾏⼀定的机构优化。
1.研究内容这⾥,我主要研究内容为理论凸轮设计在adams中的设计及其动态仿真。
后续,根据输出的相应的速度、加速度曲线等将进⾏⼀定的设计优化。
⼒图真实还原凸轮机构在设计中的真实过程。
2.⼯作原理凸轮机构是由凸轮,从动件和机架三个基本构件组成的⾼副机构。
凸轮是⼀个具有曲线轮廓或凹槽的构件,⼀般为主动件,作等速回转运动或往复直线运动。
通过对凸轮轮廓进⾏不同的设计,可以实现从动件不同形式的运动。
以此来满⾜机械设计中对于运动的精细控制过程。
3.动⼒学建模(1)建模前期准备情景设想:某公司需要设计⼀凸轮机构实现对物料的间歇夹紧过程。
其给出相应数据如下。
注:其他的暂不作要求。
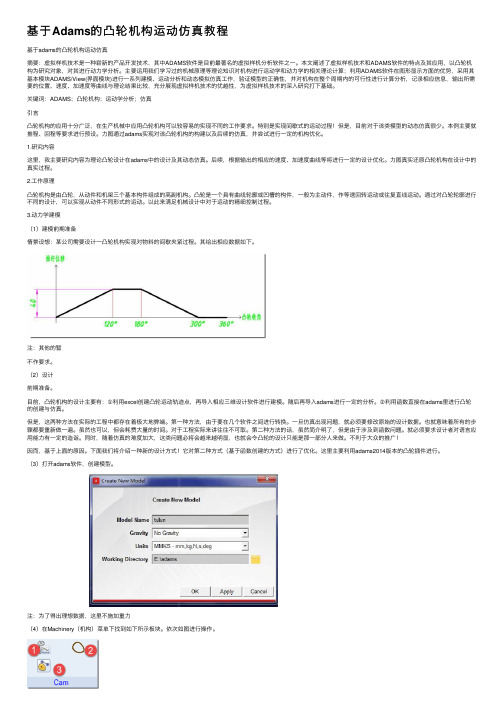
(2)设计前期准备。
⽬前,凸轮机构的设计主要有:①利⽤excel创建凸轮运动轨迹点,再导⼊相应三维设计软件进⾏建模。