基于图像识别的智能小车系统设计
210981020_基于图像识别的智能送药小车
本文设计了基于图像识别的智能送药小车。
运行过程中视觉识别模块对边缘线和中心线进行探测,并在对数字字模进行捕捉识别后通过串口传输给单片机。
信号通过单片机分析与处理后,输出周期性的PWM 波,控制全桥驱动芯片L298P 驱动4个直流减速电机来控制智能小车的转速和转向,将药品运送至对应病房。
本文采用卷积神经网络(CNN)对数字字模进行识别。
CNN 在图像识别的应用十分广泛,有着较好的鲁棒性,可以应对病房牌号被污染、遮挡的情况。
前言智能送药小车是一种低速、无人操控的自动化药物运送车辆。
其智能配送系统需要实现的主要功能为:从药房领取所需药品,沿预设定路线配送给各个病房,并在运送完成后实现自主返回药房。
通过这种送药方式,医护人员可以避免与病人的直接接触,从而减小被传染性疾病感染的风险。
由于病房多以数字表示不同的房间,小车对数字识别的准确度直接决定智能配送系统能否实现。
但在实际的工作环境下,小车所采集到的病房数字图像,可能会出现旋转、形变、投影畸变等情况;此外,病房数字牌也常常存在着被污染、遮挡的情况。
这些因素都将影响图像识别结果的准确度。
而卷积神经网络作为一种在深度学习中广泛应用的网络结构,最早由Fukushima 等人提出并实现[1],之后LeCun 等人设计并训练了CNN,该模型被称为LeNet-5,后来一系列基于该模型的网络结构在模式识别领域中取得了较好的分类效果[2]。
卷积神经网络结构可以有效降低网络的复杂度,减少训练参数的数目,使基于图像识别的智能送药小车夏宇 文晨昱(南京理工大学,江苏 南京,210000)之对平移、扭曲等具有一定程度的不变性,并具有较强的强鲁棒性和容错能力[3],基于这些优越的特性,它在各种信号和图像处理任务中展现的性能优于标准的全连接神经网络,并被广泛应用于图像识别领域[4],例如,数字识别。
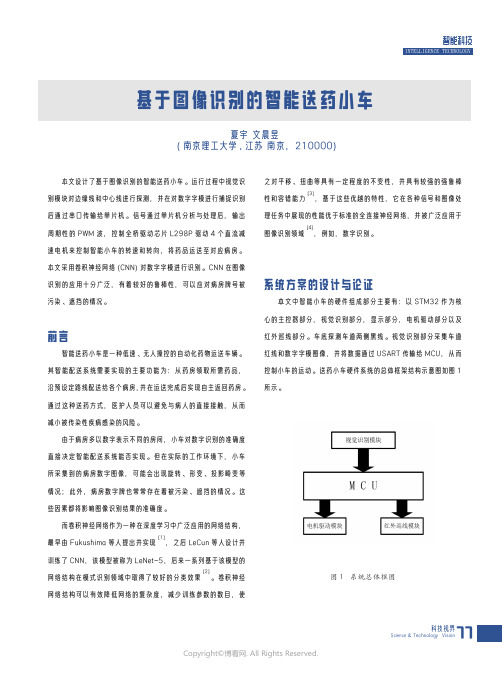
系统方案的设计与论证本文中智能小车的硬件组成部分主要有:以STM32作为核心的主控器部分,视觉识别部分,显示部分,电机驱动部分以及红外巡线部分。
基于图像处理的小车自动跟踪系统设计分析

基于图像处理的小车自动跟踪系统设计分析图像处理技术在许多领域中广泛应用,其中之一就是小车自动跟踪系统。
本文将基于图像处理技术对小车自动跟踪系统进行设计分析。
一、引言随着科技的发展,自动驾驶技术逐渐受到关注,小车自动跟踪系统作为自动驾驶技术的一种应用,具有广阔的应用前景。
本文将通过图像处理技术实现小车自动跟踪系统,并分析其设计原理和实现方法。
二、系统设计原理小车自动跟踪系统的设计主要分为两个步骤:图像处理和车辆控制。
1. 图像处理图像处理是实现小车自动跟踪的关键步骤。
首先,系统需要获取实时视频流,可以通过摄像头等设备进行采集。
接下来,对视频流进行图像预处理,包括减噪处理、边缘检测和图像分割。
减噪处理可以通过应用滤波算法降低图像中的噪声;边缘检测可以提取出图像中物体的边缘信息;图像分割可以将图像分为前景和背景。
在得到了处理后的图像后,需要进行目标检测和物体识别。
可以利用机器学习算法,如卷积神经网络(CNN),进行物体识别和跟踪,找出小车需要跟踪的目标。
2. 车辆控制在获得了目标物体的位置信息后,需要将这些信息转化为控制小车运动的指令。
根据目标物体在图像中的位置关系,可以计算出小车需要调整的转向角度和前进速度。
控制算法可以基于PID控制器或者模糊控制方法进行设计,以实现小车的自动跟随。
三、系统实现方法基于图像处理的小车自动跟踪系统的实现可以借助现有的开源软件和硬件平台,如OpenCV和树莓派。
1. 软件平台OpenCV是一个常用的计算机视觉库,可以用于图像预处理、目标检测和物体识别等任务。
通过使用OpenCV,可以轻松地实现小车自动跟踪系统的图像处理部分。
2. 硬件平台树莓派是一个基于Linux系统的低成本、低功耗的单板计算机,它可以作为小车自动跟踪系统的控制核心。
树莓派可以连接摄像头等设备进行图像采集,并利用GPIO接口控制小车的运动。
系统的实现方法如下:- 使用树莓派连接摄像头,并通过OpenCV进行图像处理。
基于图像处理的车型识别系统设计与实现

03
车型识别算法设计
算法流程设计
图像预处理
对输入的车辆图像进行去噪、增 强等预处理操作,以提高后续特 征提取和分类的准确性。
特征选择与提取
从预处理后的图像中选择和提取 能够有效表征车型的特征,如形 状、纹理、颜色等。
分类器设计与训练
基于提取的特征设计合适的分类 器,并使用大量样本数据进行训 练,以实现对不同车型的准确识 别。
要点二
图像特征提取方法
常见的图像特征提取方法包括颜色直方图、纹理分析、边 缘检测、角点检测等。其中,颜色直方图用于描述图像中 颜色的分布情况;纹理分析用于提取图像中的纹理特征; 边缘检测用于检测图像中的边缘信息;角点检测则用于提 取图像中的角点特征。这些方法可以单独使用,也可以组 合使用以提取更丰富的图像特征。
模块化设计
系统划分为图像预处理、特征提取、车型识别等模块,各模块之间 相互独立,便于开发和维护。
可扩展性
系统架构具有良好的可扩展性,可以方便地添加新的车型识别算法 或优化现有算法。
功能模块实现
图像预处理
对采集的图像进行去噪、增强、缩放等预处理操作,以提高后续 处理的准确性和效率。
特征提取
采用深度学习算法提取图像中的车型特征,包括车辆形状、纹理 、颜色等。
和准确率。
结合深度学 习技术
虽然本文所提出的车型识别系统已经具有较高的实时 性,但在一些对实时性要求更高的场景中,仍需要进 一步优化算法和提高计算效率。
THANKS
感谢观看
图像处理技术在车型识别中的应用
图像处理技术作为车型识别的重要手段,通过对车辆图像进行预处理、特征提 取和分类识别等步骤,能够实现对车辆类型的自动识别。
国内外研究现状
基于openmv图像识别智能小车的设计与制作

• 143•基于OpenMV 图像识别智能小车以三轮小车为载体,以STM32F765VI 单片机为核心,结合了OV7725感光元件、L298N 电机驱动模块,电机等外围设备,借助OpenMV IDE 软件以及OpenMV 库,采用图像识别所追踪的颜色阈值进行设置,采用PID 算法实现小球追踪功能。
经过实验测试,小车能够追踪特定色块的小球,且跟随速度较快。
1 引言智能小车是机器人竞赛、大学生电子设计竞赛、职业技能大赛等各类竞赛中中不可或缺的竞赛项目。
至今为止,智能小车应包含寻迹、避障、无线通信等功能。
常见的设计方案是以51单片机、STM32或Arduino 为主控制器,辅助外围传感器接口电路进行信号检测,利用红外循迹传感器对小车进行寻迹,利用红外传感器或超声波传感器进行避障,利用蓝牙或Wifi 进行无线通信。
机器人视觉测器对采集图像进行识别、处理。
OpenMV 是一款在STM32控制器上集成了摄像头支持Python 的机器视觉模块,借助Python 的图像识别算法库函数,可以进行颜色识别从而实现循迹、避障等功能,通过I/O 端口对机器系统进行控制,可以将采集到的信号通过串口送给其他控制器。
将OpenMV 安装在智能小车上,相当于给智能小车安装了一双眼睛。
2 硬件设计方案基于OpenMV 图像识别智能小车是以STM32为主控制器,以OV7725作为机器视觉模块,L298N 作为驱动模块。
通过OV7725采集图像并通过内置的图像处理算法控制智能小车找到红色小球,并追踪红色小球运动。
总体框图如图1所示。
图1 总体框图2.1 控制器主控制器采用的是STM32F765VI 单片机,STM32F765VI 采用ARM Cortex-M7为内核,指令系统兼容了STM32系列单片机(安飒,廉小亲,成开元,等.基于OpenMV 的无人驾驶智能小车模拟系统[J].信息技术与信息化,2019,6:16-20)。
STM32系列单片机含1组串口通信端口(TX\RX )用于与其它控制器进行串口通信,含1个ADC 转换器和1个DAC 转换器,可以将数字信号与模拟信号相互转换,10个I/O 接口,均具有中断和PWM 功能。
基于图像处理技术的车辆辨识系统设计与实现
基于图像处理技术的车辆辨识系统设计与实现随着人类社会的不断发展,交通工具的使用呈现出越来越普遍的趋势。
而在交通工具中,车辆更是无法避免的存在,其数量之多甚至已经超出了人类能够快速统计的范畴。
正是因为如此,车辆的管理和识别问题已经成为了一个亟待解决的难题。
而为了解决这一难题,基于图像处理技术的车辆辨识系统因其简单、高效、精确、实用等优点而备受关注。
本文将探讨基于图像处理技术的车辆辨识系统的设计与实现。
一、车辆辨识系统的设计要点1.1 原理介绍车辆辨识系统基于图像处理技术,该技术涉及了影像的识别和处理。
它将车辆图像的特征与已知特征进行比对,并根据比对结果判断该车辆是否为认证车辆,从而达到车辆辨识的目的。
1.2 特征提取将车辆图像中的特征提取出来有利于后续的车辆辨识。
车辆图像中的特征分为两类:形状特征和颜色特征。
形状特征通常包括车辆的轮廓线、前后灯组、车窗等;颜色特征则包括车身颜色和后窗上的反光镜颜色等。
提取特征的目的是为了得到车辆图像的二进制特征向量,将这些特征向量进行聚类和分类后,就可以得到车辆的分类结果。
1.3 特征匹配在车辆图像的分类中,特征匹配是非常重要的一个环节。
特征匹配其实就是将待识别车辆的特征与已知的特征进行比对,找出相同或相似的特征。
如果待识别车辆图像中的特征与已知特征的比对结果都相同或相似,则认为该车辆已认证成功。
1.4 数据库设计和管理为了实现一个成功的车辆识别系统,数据的管理和存储必须要做好。
通过构建数据库,存储车辆图像的特征向量和分类结果,从而实现对车辆进行分类识别。
二、车辆辨识系统的实现步骤2.1 图像采集通过车载相机、固定相机等设备采集路面的车辆图像,并将图像上传至服务器进行后续处理。
2.2 图像预处理将图像进行预处理,包括图像增强,降噪,边缘检测等操作,是为了提高图像的质量和特征的准确度。
同时也有利于降低后面的计算量。
图像预处理是整个车辆识别系统最关键的环节之一。
2.3 特征提取将预处理后的图像进行特征提取,获得所需的特征向量,用于后续的分类和匹配。
基于图像识别的智能小车系统设计
第1章绪论1.1课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段20世纪50年代是智能车辆研究的初始阶段。
1954年美国Barrett Electronics公司研究开发了世界上第一台自主引导车系统AGVS (Automated Guided Vehicle System)。
基于图像识别的智能驾驶辅助系统设计

基于图像识别的智能驾驶辅助系统设计一、引言智能驾驶辅助系统(ADAS)作为车载机器人领域中的重要研究方向,其基本原理是通过感知、控制和决策技术来实现智能驾驶,发挥人类驾驶者与车辆之间的协同作用,提高行车安全性和舒适性。
基于图像识别的智能驾驶辅助系统可以使用车载前后摄像头获取车辆周围环境的图像信息,并通过计算机视觉技术进行图像处理和识别,实现对交通标志、车道线、障碍物、行人等关键因素的实时监控和分析,为驾驶员提供可靠的信息支持和警示功能,实现自动驾驶和高级驾驶辅助。
二、基于图像识别的智能驾驶辅助系统架构设计智能驾驶辅助系统一般包括传感器、控制器、执行器和通信网络四个基本模块。
其中,传感器与车辆周围环境交互,获取图像、激光雷达和毫米波雷达等传感器所采集的数据信息;控制器根据传感器的数据信息进行处理,根据处理结果控制车辆的运动方向;执行器根据控制器的指令来调整车辆的方向、速度和制动等操作;通信网络使得边缘设备与云平台之间进行数据交换,实现智能化运行和维护。
图像信息是智能驾驶辅助系统中不可缺少的数据源之一,通过摄像头采集车辆周围的图像信息,并利用图像识别技术对车辆前方的交通标志、车道线、障碍物等进行实时识别和分析,为驾驶员提供预警和控制信号,实现智能驾驶辅助功能。
因此,基于图像识别的智能驾驶辅助系统的设计应该包括以下几个方面。
1.摄像头选择和安装。
选用高清晰度(HD)或超高清晰度(UHD)的居民级全景摄像头和FPGA或者DSP结合型图像处理器,实现图像实时采集和处理,保证驾驶员能够及时准确地预警和控制车辆运动方向。
2.图像处理和识别算法的设计。
图像处理算法旨在解决图像的去噪、滤波、增强、分割、匹配和跟踪等问题,以提高图像质量和可靠性。
图像识别算法包括交通标志分类识别、车道线检测与跟踪、行人和车辆识别与跟踪等模块的设计和优化,以可靠地提供实时的交通标志识别、车距测量、目标跟踪等功能。
3.实时性和鲁棒性的保证。
基于图像识别的自主驾驶智能小车的设计与实现

基于图像识别的自主驾驶智能小车的设计与实现作者:陈二阳张修军袁姜红来源:《现代电子技术》2018年第18期摘要:结合图像识别、模糊自适应PID控制等算法,设计并实现一种自主驾驶智能小车。
以NXP的微控制器MK60N512VMD100为核心控制单元,通过CMOS摄像头OV7725检测并分析跑道信息,利用512线光电编码器测定小车的运行速度,并将速度和方向参数反馈给电机和舵机,结合PID算法实现闭环控制。
经过多次在实验室模拟跑道实测发现,小车运行轨迹控制较为精确,速度平稳,具备较强的环境适应能力。
关键词:图像识别;模糊自适应PID控制;智能小车; CMOS摄像头;光电编码器;闭环控制中图分类号: TN02⁃34; TP273 文献标识码: A 文章编号: 1004⁃373X(2018)18⁃0162⁃04Design and implementation of autonomous driving intelligent carbased on image recognitionCHEN Eryang1,2, ZHANG Xiujun1, YUAN Jianghong3(1. School of Information Science and Engineering, Chengdu University, Chengdu 610106, China;2. School of Geophysics, Chengdu University of Technology, Chengdu 610059, China;3. Sichuan Winshare Vocational College, Chengdu 611330, China)Abstract: An autonomous driving intelligent car was designed and implemented based on image recognition and fuzzy adaptive PID control algorithm. With the microcontrollerMK60N512VMD100 of the NXP as the core control unit, the CMOS camera OV7725 is used to detect and analyze runway information, and the photoelectric encoder with 512 lines engraved per round is used to measure the running speed of the car, and feed speed and direction parameters back to the motor and steering engine, so as to realize closed?loop control by combining with the PID algorithm. After many actual tests on the simulation runway of the laboratory, it has been found that the car has an accurate running trajectory control, stable speed and strong environment adaptability.Keywords: image recognition; fuzzy adaptive PID control; intelligent car; CMOS camera; photoelectric encoder; closed⁃loop control近年来,随着车联网、物联网、无线通信、计算机、数据挖掘、机器视觉、工业控制等汽车电子相关技术的快速发展,令本已炙手可热的汽车自主驾驶技术在国内外成为研究焦点,越来越多的厂商投身其中[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章绪论1.1 课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2 国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段 20世纪50年代是智能车辆研究的初始阶段。
1954年美国Barrett Electronics 公司研究开发了世界上第一台自主引导车系统AGVS(Automated Guided Vehicle System)。
第二阶段从80年代中后期开始,世界主要发达国家对智能车辆开展了卓有成效的研究。
在欧洲,普罗米修斯项目开始在这个领域的探索。
在美洲,美国成立了国家自动高速公路系统联盟(NAHSC)。
在亚洲,日本成立了高速公路先进巡航/辅助驾驶研究会。
第三阶段从90年代开始,智能车辆进入了深入、系统、大规模研究阶段。
最为突出的是,美国卡内基.梅隆大学(Carnegie Mellon University)机器人研究所一共完成了Navlab系列的10台自主车(Navlab1—Navlab10)的研究,取得了显著的成就。
而我国开展智能车辆技术方面的研究起步较晚,开始于20世纪80年代。
而且大多数研究处在于针对某个单项技术研究的阶段。
虽然我国在智能车辆技术方面的研究总体上落后于发达国家,并且存在一定得技术差距,但是我们也取得了一系列的成果,主要有:1)中国第一汽车集团公司和国防科技大学机电工程与自动化学院与2003年研制成功我国第一辆自主驾驶轿车。
2)南京理工大学、北京理工大学、浙江大学、国防科技大学、清华大学等多所院校联合研制了7B.8军用室外自主车,该车装有彩色摄像机、激光雷达、陀螺惯导定位等传感器。
可以预计,我国飞速发展的经济实力将为智能车辆的研究提供一个更加广阔的前景。
因此,对智能小车进行深入细致的研究,不但能加深课堂上学到的理论知识,更能将理论转化为实际运用,为将来打下坚实的基础。
1.3 课题研究的目的及意义图像识别技术是信息时代的一门重要的技术,其产生目的是为了让计算机代替人类去处理大量的物理信息。
随着计算机技术的发展,人类对图像识别技术的认识越来越深刻。
图像识别技术的过程分为信息的获取、预处理、特征抽取和选择、分类器设计和分类决策。
图像处理技术的应用广泛,人类的生活将无法离开图像识别技术,研究图像识别技术具有重大意义。
通过毕业设计,我们将所学的基础课,专业课等方面的知识进行一次全面的复习。
能够培养我们综合运用所学知识解决实际工程技术问题的能力,培养我们设计计算、编写设计文件、使用规范手册和应用计算机的能力,培养我们独立思考,解决问题以及小组合作的能力,培养我们调查研究、查阅技术文献、编写相关文档的能力。
通过毕业设计,我们将学习如何将平时所学知识运用到实际中,能够更好地将课本知识和实际结合起来。
第2章系统硬件设计2.1 系统设计方案概述图2.1 系统整体框图基于图像识别自主寻迹智能小车的系统总体结构如图2.1所示。
系统由电源组件、检测组件、主控组件、输出组件共 4 个部分构成。
电源组件采用电池供电,经过电压转换芯片转换之后,每个模块得到所需要的电压。
检测组件由摄像头模块和测速模块组成, 主控组件采用ARM 芯片作为控制核心,输出组件由电机控制模块和显示模块组成,显示模块包含图像实时显示和速度实时显示。
2.2 主控模块电路STM32最小系统如图2.2所示。
最小系统由CPU、电源模块、时钟模块、复位模块、BOOT 启动模块、下载模块组成。
STM32F103ZET6 是一款32 位的ARM 芯片,其电源模块采用SPX1117 电压转换芯片和相关电路得到系统所需电压,时钟模块采用8 MHz 和32.768 kHz 的晶振分别作为芯片的备用时钟源和RTC 时钟源。
复位模块包括上电复位和按键复位电路。
BOOT 启动模块的作用是设置启动模式,通过BOOT0 和BOOT1 设置:当BOOT0 为0 时,CPU 执行片上FLASH 代码; 当BOOT0 为1、BOOT1为0 时,系统的模式为串口下载模式;当BOOT0 与BOOT1 均为 1 时,CPU 执行SRAM 内部的代码,下载模块采用JTAG 下载。
图2.2 STM32最小系统2.3 电源模块电路由于各电路模块所需电压不同,本设计需多种电源供电。
STM32F103主控芯片采用3.3V供电,电机驱动采用5V与12V,红外收发检测电路采用5V与3.3V,液晶显示与触角传感电路均采用3.3V供电。
外部电源采用12V的直流电压,因此根据设计要求,本设计进行了电源转换设计。
采用KA7805芯片实现12V到5V的转换。
KA7805的作用是输入大于5V的直流电压,输出5V的直流电压,且管脚较少,易于连接和实现,稳定性高,本设计采用LM1117-3.3芯片将5V转换为3.3V,具体电路设计如图2.3所示。
图2.3 电源模块电路2.4 图像采集模块电路图像采集模块电路如图 2.4所示。
该模块采用CMOS 图像传感器OV7725 。
图像采集原理如下:首先,OV7725 捕捉到原始信号后,将其输入到模拟处理器中,处理后分成G 和RB 两路输入到A/D 转换器,经A/D 转换器处理后转换成数字信号,然后输入到FIFO,单片机从FIFO 读取、处理数据并采集图像。
FIFO 存储摄像头采集到的图像数据,其存储空间为 3 M。
摄像头采集完一幅图像后,将帧中断信号输入到CPU, CPU 收到帧中断信号后,将WEN 和HREF引脚电平拉高,使图像数据存入FIFO。
当CPU 再次收到帧中断信号,表明图像数据已存入FIFO,此时关闭帧中断,将WEN 电平拉低, 避免图像数据再次写入FIFO。
图2.4 图像采集模块电路2.5 速度检测模块电路小车的行驶速度常用检测方法包括霍尔传感器测速、光电编码器测速以及光电传感器测速。
由于霍尔传感器体积相对较大,且光电编码器驱动齿轮靠近电机,容易受磁场干扰,而光电传感器结构简单,测速精度高、反应快,因此,本设计采用光电传感器测速。
光电测速模块如图2.5所示。
速度检测原理如下:当小车行驶时,车轮会带动光电码盘转动。
当码盘中没有障碍物时,红外管发出的红外信号经红外接收管接收后输出电压比较值,再经LM393N 比较后, 输出开关量。
码盘上一共有20 格没有障碍物,所以用码盘周长除以20 就得到 1 个脉冲来临车子行走的距离S,同时打开定时器和计数器,定时T,得到脉冲计数n,到时间后就将时间清零重新计数,得到小车的速度:V = S ×n/T。
图2.5 速度检测模块电路2.6 电机控制模块电路电机控制包括电机的驱动和电机的调速 2 部分,本设计采用L293D 控制4 台直流电机。
将每台直流电机的一端接地,另一端接到L239D 的输出端。
将L293D 的输入端接一个I/O 口,在第1 脚和第9 脚都使能的状态下,只需要控制I/O 口的电平状态即可控制电机。
电机驱动模块如图2.6所示。
由于小车要在不同的赛道上行驶,为防止其冲出赛道,需要在不同的赛道上采用不同的安全速度。
对于直流电机的速度调节,本设计中综合采用PWM 控制、PID 控制和棒棒控制技术。
PWM 用于控制不同路径小车安全行驶的速度,PID 调速用来维持同一路段的速度,棒棒控制用于路径切换时的调速。
1)PWM 控制。
计数器在时钟的驱动下计数,当计数器的值加到和输出比较寄存器的值相等时, I/O 口的电平翻转后接着计数。
当计满后,计数器清零,重新开始计数。
2) PID 控制。
PID 控制就是用比例(P)、积分(I)、微分(D)通过线性组合进行控制。
比例系数越大,调节速度就越快。
如果比例的作用太大, 会使得系统的稳定性降低。
使用积分调节会使得系统动态响应变慢,因此积分环节常以PI 或者PID 组合形式出现。
微分环节能够反映系统偏差的变化率,预测偏差的动态变化,但是它的引入容易引起震荡, 因此它一般是以PD 或者PID 组合的形式出现。
3) 棒棒控制。
棒棒控制是一种极限控制,其作用就是使得小车速度瞬间达到最大或者最小值保证小车完成路径切换动作。
图2.6 电机控制模块电路小车运动状态通过电机A和B的不同方向转动来实现,电机有正转、反转和停止三种状态,每个电机由一对I/O口进行控制。
表2.1是I/O端口状态与电机制动对照表。
L293D芯片采用5V(VSS)与7V(VS)直压供电,ENA和ENB分别用STM32F103主控芯片的TIM3_CH3和PB1/ADC_IN9/TIM3_CH4控制,产生PWM1和PWM2两路PWM波输出,IN1-IN4分别用PE3-PE6实现I/O输出控制电机转动方向。
表2.1 I/O端口状态与电机制动对照表2.7 OLED液晶屏显示模块模块由一片 OLED 玻璃屏幕和一个驱动 PCB 板组成。
模块分辨率是 128x64,内置了升压电路(OLED 点亮显示 8~14V 的高电压)和复位电路,所以只要 3~5V 电源输入电压即可。
采用 I2C 总线通过,电路连接简洁。
0.96 英寸的大小与 1 元硬币差不多。
小体积带来小的功耗,只要 3mA 左右的电流就能让它显示内容。
原理:可以把 OLED 屏上的像素点理解成 LED 灯,小小玻璃片上嵌入了 8192( 128x64)个 LED,对应的 LED 点亮或熄灭,则形成图案和文字,OLED 与传统 LCD 屏的差异不大。