自由度的详解和计算
平面自由度计算公式

平面自由度计算公式
平面自由度指的是一个物体在平面内可以任意运动的自由程度,
通常用两个自由度来描述。
具体计算公式如下:
平面自由度=总自由度-移动自由度
其中,总自由度指的是一个物体在三维空间中的自由度,通常是3个自由度。
移动自由度指的是一个物体在平面内可以沿着平面内某一
方向运动的自由度,通常是1个自由度(因为平面内只能沿一个方向
移动,不能同时在两个方向上移动)。
因此,平面自由度= 3 - 1 = 2。
值得注意的是,以上公式是基于物体可以在平面内任意运动的前
提下计算得出的。
如果物体受到某些限制,例如地面摩擦力等,平面
自由度可能会受到影响。
此外,在一些特殊情况下,物体的平面自由度也可能会超过2个。
例如,如果物体受到一个平面内的力矩,那么它在平面内的自由度就
可能会增加到3个。
在实际计算中,我们需要根据具体情况来确定平面自由度的值。
机械原理自由度计算

机械原理自由度计算
在机械原理中,自由度是指一个物体独立运动的数目。
对于一个杆件(刚体),在平面上可以由其上任一点A的坐标x和y,以及通过A点的垂线AB与横坐标轴的夹角等3个参数来决定,因此杆件具有3个自由度。
对于做空间运动的构件,有6个自由度;对于做平面运动的构件,有3个自由度。
假设活动构件数为n,高副数为Ph,低副数为Pl,则运动链的自由度为$F=3n-2Pl-Ph$。
其中,点线接触为低副,面接触为高副。
在计算运动副时,需要注意以下情况:
- 复合铰链:两个以上的构件在同一处以转动副相联。
计算自由度时,如有K个构件在同一处形成复合铰链,则其转动副的数目为$(k-1)$个。
- 局部自由度:构件局部运动所产生的自由度,它仅仅局限于该构件本身,而不影响其他构件的运动。
在计算自由度时,从机构自由度计算公式中将局部自由度减去。
- 虚约束:对机构的运动实际不起作用的约束。
计算自由度时应去掉虚约束。
虚约束都是在一定的几何条件下出现的,常见的情况有:两构件联接前后,联接点的轨迹重合;两构件构成多个移动副,且导路平行;两构件构成多个转动副,且同轴;运动时,两构件上的两点距离始终不变;对运动不起作用的对称部分;两构件构成高副,两处接触,且法线重合。
在计算自由度时,需要考虑机构的具体结构和运动情况,以便确定各个运动副的约束情况,从而正确计算自由度的数值。
结构力学自由度计算
E2
K
Q
P
O
1
1
1
N 1
1M 1L
把一端共铰而不共线的两根链杆装置(或两
根不共线链杆用铰连接成整体的装置)称为二 元体.
1. 二元体规则:在杆件体系上依次增减二 元体不改变原体系的几何组成性质。
II
III
I
A
B
C
E
F
D
G HFGHADC
B
E
2. 二刚片规则
两个刚片之间用一个铰和一根链杆相连, 且 三铰不在一直线上,则组成无多余约束的几何 不变体系.或两个刚片之间用三根链杆相连,且 三根链杆不全平行或不交于一点,则组成无多 余约束的几何不变体系。
1) 一根链杆相当于一个约束,在体系的适当 位置增加一个链杆可使减少体系一个自由度。
y
y
x
y
o
o
x
x
2)、一个单铰相当于两个约束。在体系的适当 位置增加一个单铰可使体系减少两个自由度。
y
y
x
y
o
o
x
x
3)、联结n个刚片的复铰相当于(n-1)个单铰, 相当于(n-1)×2个约束。
y
x
y
o
x
4)、刚性联结或固定端约束相当于三链杆,即三 个约束。在体系的适当位置增加一个固定端可使体 系减少3个自由度。
三杆交于一点
F D B
A
C
E
刚片1
三杆平行不等长
A
C
B
三铰共线
常变体系——发生大位移的体系。
刚片2
B
D
F
A
C
E
刚片1
A
K
L
自由度的计算(经典课件)
目录
• 自由度的定义 • 自由度的计算方法 • 自由度在物理中的应用 • 自由度在数学中的应用 • 自由度的计算实例
01 自由度的定义
自由度的定义
自由度是指在某一物理系统或数学模型中,描述一个状态所需的独立参数的数量。
在物理学中,自由度通常用于描述粒子在空间中的位置和动量,或者描述物体的旋 转状态。
热力学的自由度计算
总结词
热力学的自由度计算是研究系统热力学性质的重要手段,它涉及到系统的熵、焓等热力学量的计算。
详细描述
在热力学中,自由度的计算通常基于系统的质量和能量守恒方程。通过求解这些方程,可以得到系统 的熵、焓等热力学量,进而确定系统的自由度数。自由度的计算对于分析系统热力学性质、预测反应 过程和优化能源利用等具有重要意义。
公式
对于一个$m times n$的矩阵$A$,其自由度可以通过计算其秩$r$来 获得,即$r = min(m, n)$。
向量的自由度计算
总结词
向量的自由度计算是解析几何中的基本概念,用于描述向量在空间中的独立变化程度。
详细描述
向量的自由度是指向量在空间中可以独立变化的维度数量。对于一个三维向量,其自由度为3, 因为三个参数(x、y、z)可以独立地变化以产生不同的向量。更高维度的向量具有更多的自 由度。
在数学中,自由度通常用于描述矩阵或向量的秩,或者描述概率分布的参数个数。
自由度在物理中的意义
01
在经典力学中,一个质点的自由度 是3,因为需要三个参数(x, y, z) 来描述其在空间中的位置。
02
对于一个刚体,其自由度取决于 其运动方式。例如,一个绕固定 点旋转的刚体有3个自由度(角度 和角速度)。
统计力学的自由度计算
自由度的计算(经典PPT)

计算方法
组内自由度 = 总观测值数 - 处理因素的水平数。
示例
若有12个观测值,处理因 素有3个水平,则组内自由 度为12-3=9。
总自由度计算方法
总自由度的定义
计算方法
示例
总自由度是指所有观测 值变异所对应的自由度。
总自由度 = 总观测值数 - 1。
自由度的计算(经 典ppt)
目录
• 自由度概念及意义 • 单因素方差分析中自由度计算 • 多因素方差分析中自由度计算 • 回归分析中自由度计算与应用 • 假设检验中自由度确定方法 • 总结:提高自由度计算准确性策
略
01
自由度概念及意义
自由度定义
01
自由度是指当以样本的统计量来 估计总体的参数时,样本中独立 或能自由变化的数据的个数,称 为该统计量的自由度。
根据实验目的、效应大小、显 著性水平等因素合理确定样本 量。
在实验过程中及时调整样本量, 以确保结果的可靠性。
结合实际案例进行练习以提高熟练度
选择具有代表性的案例,涵盖不 同类型实验设计和数据处理方法。
逐步分析案例中的实验设计、数 据处理及自由度计算过程。
通过反复练习,加深对自由度计 算原理和方法的理解,提高计算
交互效应自由度
当考虑A、B两因素交互作用时, 交互效应的自由度为(a-1)(b-1)。 若不考虑交互作用,则交互效应
自由度为0。
总自由度
实验中所有观测值数目减1。例 如,在有n个观测值的实验中,
总自由度为n-1。
多因素实验设计下自由度计算实例
实验设计
主效应自由度
假设有一个2x3x2的多因素实验设计,即因 素A有2个水平,因素B有3个水平,因素C 有2个水平。
计算自由度
计算自由度
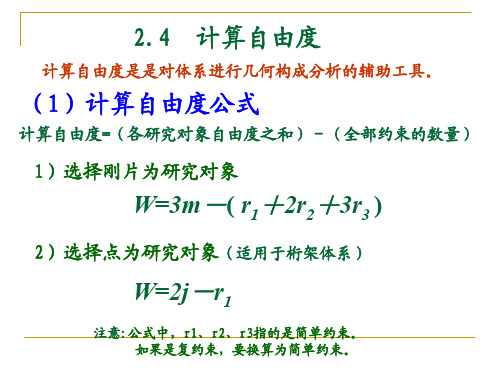
计算自由度是是对体系进行几何构成分析的辅助工具。
(1)计算自由度公式
计算自由度=(各研究对象自由度之和)-(全部约束的数量)
1)选择刚片为研究对象
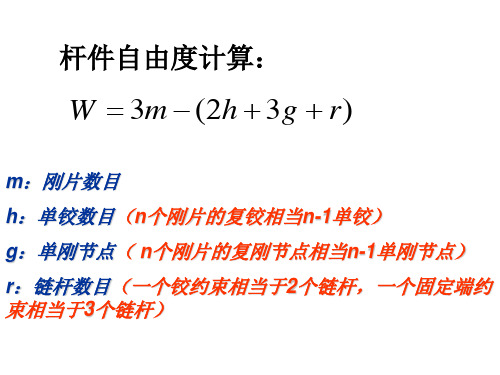
W=3m-(r +2r +3r ) 1 2 3
2)选择点为研究对象(适用于桁架体系)
W=2j-r 1
注意:公式中,r1、r2、r3指的是简单约束。 如果是复约束,要换算为简单约束。
A B C 1 D 2
解: 选AB及BCD为研究对象,其余为约束。
W=3m-(r +2r +3r ) 1 2 3 =3×2-(2+2×1+3×1) =-1
结论: W<0 ,该体系多余约束,
经判断为几何不变体系。
例3: 进行体系的计算自由度分析。
E C F D
解:
选A、B 、C、D、E、F点 为研究对象,杆为约束。
简单链杆
复链杆
复杂链杆
三个铰有6个自由度,由一个杆连成后, 变为3个自由度,说明相当于3个约束。
复链杆换算为简单链杆的公式为2j – 3,j为点数。
(3)利用计算自由度分析体系的几何组成
计算自由度分析:
W > 0 W < 0 W = 0
说明体系一定有自由度,几何可变, 但不能断定体系有无多余约束。 说明体系一定有多余约束,但不能断定 体系有没有自由度。 当无多余约束时,为几何不变体系。 当有多余约束时,为几何可变体系。
(2)复约束 (复杂约束)
1)复刚结点(复杂刚结点):
──连接n个杆的刚结点
简单刚结点
复刚结点
复刚结点换算为简单刚结点的公式为m-1。 m为杆件数。
2)复铰(复杂铰):
──连接n个刚片的复铰
自由度的计算方法

自由度的计算方法一、自由度的基本概念。
1.1 自由度是什么呢?简单来说,它就像是一个系统或者对象能够自由活动或者变化的“空间”大小。
打个比方,就像一个人在一个大房间里,他可以到处走动,这个走动的范围就有点像自由度。
在科学和数学的世界里,自由度有着非常精确的定义,但咱先从这种比较形象的方式去理解它。
1.2 自由度可不是一个抽象到摸不着头脑的东西。
比如说,一个单摆,它只能在一个平面内来回摆动,它的自由度相对就比较小。
这就好比一个人被限制在一条小道上活动,能做的动作很有限。
二、自由度在不同领域的计算方法。
2.1 在统计学里。
统计学中的自由度计算就像是一场有趣的解谜游戏。
比如说,我们有一组数据,要计算样本方差。
这里面自由度的计算就和样本数量有关。
如果我们有n个样本,那么计算样本方差时的自由度就是n 1。
这就好像是我们本来有n个可以自由变动的数,但因为要满足一些条件,就像被抽走了一点“自由”,少了1个自由度。
这就如同一个团队有n个人,但是有一个人要负责协调整体,不能完全自由行动,所以真正能自由发挥的就少了一个。
2.2 在物理学中。
物理学里自由度的计算更加直观。
像一个刚体在空间中的运动,它有平动和转动。
一个刚体在三维空间中的平动有3个自由度,这就像一个小方块可以在前后、左右、上下三个方向移动,这是它的平动自由度。
然后呢,刚体绕着三个坐标轴的转动又有3个自由度,总共就是6个自由度。
这就好比一个会翻跟头、能到处跑的杂技演员,他有多种动作方向的可能性,这些不同方向的动作就构成了他的自由度。
2.3 在机械工程领域。
机械工程里自由度也很重要。
例如一个简单的平面机构,由一些杆件和关节组成。
我们要计算这个机构的自由度,就要考虑杆件的数量、关节的类型等因素。
这里面有一个公式,F = 3n 2PL PH(这里F是自由度,n是杆件数,PL是低副的数量,PH 是高副的数量)。
这就像一个复杂的机械拼图,每个杆件和关节就像拼图的小碎片,我们要根据它们的数量和类型来算出这个机械结构整体能有多少“活动空间”,也就是自由度。
机械原理自由度的计算
机械原理自由度的计算机械原理是研究物体在空间中的运动和静止状态的学科,而自由度则是描述一个物体在空间中能够自由运动的能力。
在机械系统中,了解物体的自由度对于设计和分析至关重要。
本文将介绍机械原理自由度的计算方法,帮助读者更好地理解机械系统的运动特性。
首先,我们需要了解自由度的概念。
在机械系统中,一个物体的自由度可以通过其能够在空间中独立运动的轴线数量来描述。
例如,一个刚性物体在三维空间中有6个自由度,分别是三个平移自由度和三个转动自由度。
而在二维平面中,一个刚性物体有3个自由度,分别是两个平移自由度和一个转动自由度。
通过计算物体的自由度,我们可以更好地了解其在空间中的运动特性。
接下来,我们将介绍如何计算机械系统的自由度。
对于一个多连杆机构,我们可以通过以下步骤来计算其自由度:1. 确定机构的运动副数量,首先需要确定机构中所有的运动副数量,包括旋转副和滑动副。
运动副的数量将直接影响机构的自由度。
2. 计算约束数量,接下来需要计算机构中的约束数量,包括固定约束和移动约束。
固定约束会限制物体的运动,而移动约束则会增加机构的自由度。
3. 计算自由度:最后,通过运动副数量和约束数量的对比,我们可以计算出机构的自由度。
自由度的计算公式为:自由度 = 3 (运动副数量) 约束数量。
通过以上步骤,我们可以准确地计算出机械系统的自由度,从而更好地理解其运动特性和设计特点。
在实际工程中,了解机械系统的自由度对于设计和分析都具有重要意义。
通过准确计算自由度,我们可以避免设计中的错误,确保机构的运动性能符合要求。
同时,对于复杂的机械系统,计算自由度也可以帮助工程师更好地理解其结构和运动规律,为系统的优化提供重要参考。
总之,机械原理自由度的计算是机械工程中的重要内容,通过准确计算自由度,我们可以更好地理解机械系统的运动特性,为设计和分析提供重要依据。
希望本文的介绍能够帮助读者更好地理解这一概念,为工程实践提供帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§1.1 机构的组成
§1.2 机构运动简图 §1.3 机构具有确定运动的条件
§1.4 平面机构自由度的计算
§1.5 平面机构的组成原理和结构分析
本章的主要内容
1、主要内容 • 机构的组成及其具有确定运动的条件 • 机构运动简图及其绘制 • 机构的组成原理和机构的结构分类 2、重点 • 机构具有确定运动的条件和平面机构自由度的 计算 • 机构的组成分析和机构的级别判别。 3、难点 • 虚约束的判别
2.机构运动简图的绘制
绘制方法及步骤: (1)搞清机械的构造及运动情况,沿着运动传递路线,
查明组成机构的构件数目、运动副的类别及其位置;
(2)选定视图平面; (3)选适当比例尺,作出各运动副的相对位置,再画 出各运动副和机构的符号,最后用简单线条连接即得 机构运动简图。
举例 1 小型压力机
举例 2
F=3n-(2pl+ph)
举例 3
2 3 4 1
4 5
10 C
11
8 ,9
3 2
3 7 D B 18 4 A 1
1
机构具有确定运动的条件
• 原动件数 = 机构的自由度
计算平面机构自由度时的注意事项
• 复合铰链:两个以上构件通过回转副
并联在一起
• 局部自由度:机构中某构件所产生的
局部运动并不影响整个机构中其它构件的 运动
§1.1 机构的组成
1.构件 2.运动副 3.运动链 4.机构
构 件
机构是怎样组成的?
连接:运动副 运动单元:构件 运动单元+连接 运动链 运动链+机架 机构
运动副:两个构件直接接触并产生 某些相对运动的可动联接 • 两个构件上参加接触的运动副表面 称运动副元素,运动副的元素是点、 线、面。
内燃机
10 C
11
8 ,9 3 7 D B 18 4 A 1
§1.3 机构具有确定运动的条件
构件自由度 : 构件具有独立运动参数的数目
机构自由度 : 机构具有独立运动参数的数目
一个构件的平面运动有三个自由度
• 无约束
平面运动副的约束
平面运动副的约束
高副约束1个自由度
§1.4 平面机构的自由度计算公式 n个活动构件(不包括机架), pl个低 副, ph个高副,则 自由度计算公式:
颚式破碎机
机构简图及杆组拆法
组成原理:原动件+机架+杆组(F=0)
平面机构中的高副低代
高副低代的原则:
• 代替前后机构的自由度完全相同 • 代替前后机构的瞬时速度和瞬时 加速度完全相同
高副低代的方法: 二高副元素在接触点处的曲率中心用 一构件和两个低副代替
凸轮机构:
举例
6
小结:掌握机构自由度的计算方法; 机构具有确定运动的条件;
运动副分类: 空间和平面运动副
平面运动副 空间运动副
平面运动副:两构件相对运动为平面运 动的运动副 低副:面接触的运动副(回转副、移动副)
高副: 点、线接触的运动副
平面运动副符号:
空间运动副的符号
3.运动链
运动链:构件通过运动副联接而成的相对可动的系统。
运动链成为机构的条件:将运动链的一个构件固定,
虚约束注意事项
• • • • • 两构件连接前后轨迹重合点 两构件某两点间的距离始终不变 两构件组成多个移动副 两构件组成多个转动副 不影响机构运动的重复部分
§1.5 平面机构的组成原理 和结构分析 • 组成原理 • 结构分类 • 结构分析
基本杆组:(低副)
构件组去掉机架和原动件后剩下的F=0 的最小运动链。
基本杆组拆分的原则及方法。
• 虚约束:机构中某些运动副或某些运动
副与构件的组合所形成的约束与其它约束 重复而不再起作用
举例 4
F 3n 2 pl ph 3 5 2 6 0 3
F 3n 2 pl ph 3 3 2 3 1 2
F 3n 2 pl ph 3 4 2 6 0 0
当它的一个或几个构件作独立运动时,其余构件随之作
确定的运动,这种运动链便成为机构。 显然,不能运动或无规则乱动的运动链都不能成为 机构。 为使运动链获得确定的相对运动,构件的总数、运动
副类型和数量以及独立运动数目必须符合一定的关系,
将在自由度计算中加以论述。
§1.2 机构运动简图
在对现有机械进行分析或设计新机器时,都需 要绘出其机构运动简图。 1. 机构运动简图的定义 机构运动简图 根据机构的运动尺寸,按一定的 比例尺定出各运动副的位置, 采用运动副及常 用机构运动简图符号和构件的表示方法,将机构 运动传递情况表示出来的简化图形。 机构示意图 按比例绘出不严格的,只表示机械 结构状况的简图。
F=3n-2pl =0
级别
结构分类:杆组为几级?什么形式?
例如Ⅱ级组:二杆三副组
外接副:与杆组以外的构件相连的运动副 内接副:与杆组内部的构件相连的运动副
例如Ⅲ级组:三杆六副组 特点:其中一个构件上有三个内接副
举例 5
结构分析: 从远离原动件的构件开始,尽可 能拆成最低的杆组,每拆完一个杆 组,保证剩下的杆组自由度为零。 对剩下的杆组再拆时,仍从最远端 开始拆,每拆一次杆组,均从最低 级的杆组开始,无法拆时,再试拆 高一级的杆组。 所拆杆组中,级别最高的杆组为 该机构的杆组级别