机械设计习题(轮系)
杨可桢《机械设计基础》(第5版)笔记和课后习题(轮系)
图 5-3 解:这是一个定轴轮系,由题意可得:
1 / 14
圣才电子书 十万种考研考证电子书、题库视频学习平台
反转原理:给周转轮系施以附加的公共角速度 H 后,不改变轮系中各构件之间的相
对运动,原轮系将转化成为一假想的定轴轮系,由此可按定轴轮系的公式计算该新轮系的传
动比。
设周转轮系中两个太阳轮分别为 G、K,行星架为 H,则其转化轮系的传动比:
圣才电子书 十万种考研考证电子书、题库视频学习平台
第5章 轮 系
5.1 复习笔记
一、轮系的类型 轮系是指由一系列齿轮组成的传动系统。 根据轮系运转时各个齿轮轴线相对于机架位置是否固定,分为三类: 1.定轴轮系:轮系中各齿轮轴线相对于机架均为固定,又分为平面定轴轮系和空间定 轴轮系。 2.周转轮系:轮系中至少有一个齿轮轴线位置不固定,而是绕着其他齿轮的固定轴线 回转。周转轮系由太阳轮、行星轮、系杆及机架组成,又可分为差动轮系(自由度为 2)和 行星轮系(自由度为 1)。 3.复合轮系:既包含定轴轮系,又包含周转轮系,或者是由几部分周转轮系组成。 根据轮系中各轮几何轴线在空间的相对位置,分为两类:平面轮系和空间轮系。
图 5-2
5-2 在图 5-3 所示轮系中,已知 z1=15,z2=25, z2' =15,z3=30, z3' =15z4=30, z4' =2(右 旋),z5=60, z5' =20(m=4 mm),若 n1=500 r/min,求齿条 6 线速度 v 的大小和方向。
3 / 14
圣才电子书 十万种考研考证电子书、题库视频学习平台
(5)空间周转轮系中,由于角速度矢量与系杆的角速度矢量不平行,所以不能用代数 法相加减。但是不影响基本构件之间传动比的计算。
《机械设计基础》题库 计算 轮系 自由度

试题题型:计算题一、计算图示机构的自由度,并判断机构是否具有确定的运动。
(如有复合铰链、虚约束、局部自由度须指出)DEDEHKCDDE二、轮系的计算 1.在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I、H轴的转向是否相同?2.在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比I ⅠⅡ,并说明I、Ⅱ轴的转向是否相同?3.在图示轮系中,已知各轮的齿数为Z 1= 20,Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。
’ Ⅱ4.在图示轮系中,已知各轮齿数为Z1= 55, Z2=11,Z3=77,Z3’=49,Z4=12,Z5=73,试求传动比i1H。
5.在图示轮系中,已知各轮齿数为Z1= Z2= 30,Z3= 40,Z4=20,Z5=18,Z6=38,试求传动比i1H。
6.在图示轮系中,已知各轮齿数为Z1= Z2’= 20,Z2=40,Z3= 80,试求传动比i1H。
7.在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。
8.在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求1、轮系的传动比i 1H 。
2、若n 1=1000r/min ,转臂H的转速n H =?9.在图示轮系中,已知各轮齿数为Z 1= Z 3=15 ,Z 2’= 60,Z 2= Z ,3=20,Z 4= 65,试求轮系的传动比i 1H 。
210.在图示轮系中,已知各轮齿数为Z 1=101, Z 2=100,Z 3=99,Z 4= 100,轮1的转速n 1=1r/min ,(顺时针),且n 4=n 1,n 4的方向与n 1相反,求n H 的大小及转向。
机械设计基础 第5章 轮系

Z2 H Z1
Z’2
Z3
=99。 z3=99。源自101×99/100× i1H=1-iH13=1-101×99/100×100 =1/10000, iH1=10000 结论:系杆转10000圈时, 结论:系杆转10000圈时,轮1同向转1圈。 10000圈时 同向转1 100, 又若 Z1=100, z2=101, z2’=100, z3=100, =-1/100, i1H=1-iH1H=1-101/100 =-1/100, iH1=-100
所有齿轮几何轴线的位置均固定不 变的轮系,称为定轴轮系。 变的轮系,称为定轴轮系。
§5-1 轮系的类型
二、周转轮系
周转轮系:在运转过程中至少有一个齿轮几何轴线的位置并不固定, 周转轮系:在运转过程中至少有一个齿轮几何轴线的位置并不固定, 而是绕着其它定轴齿轮轴线回转的轮系,称为周转轮系。 而是绕着其它定轴齿轮轴线回转的轮系,称为周转轮系。
方向: 方向:见图 复合轮系
Z5
Z’5
§5-4 复合轮系及其传动比
复合轮系:几个基本周转轮系构成, 复合轮系:几个基本周转轮系构成,或定轴轮系与周转轮系构成 整个复合轮系不可能转化为一个定轴轮系,所以正确的做法是: 整个复合轮系不可能转化为一个定轴轮系,所以正确的做法是: 1 区分其中的基本周转轮系和定轴轮系 2 分别计算各轮系的传动比 3 各传动比联合求解
ω1 3 Z2 Z3 Z5 = i12i2′3i34i45 = (− 1) ω5 Z1Z2′ Z3′
§5-2 定轴轮系及其传动比
传动比计算
ω1 (− 1)3 Z2Z3Z4 Z5 i15 = =i i ′ i i = ω5 12 2 3 34 45 Z1Z2′ Z3′ Z4
机械设计题库及参考答案

机械设计题库及参考答案一、单选题(共67题,每题1分,共67分)1.工作时承受弯矩并传递扭矩的轴,称为(A、转轴B、传动轴C、心轴正确答案:A2.蜗杆传动的中间平面是指( ) 的面。
A、同时垂直蜗杆和蜗轮轴线B、同时通过蜗杆和蜗轮轴线C、通过蜗杆轴线并垂直于蜗轮轴线D、通过蜗轮轴线并垂直于蜗杆轴线正确答案:C3.滚动轴承的密封装置按密封的结构形式- -般分为接触式密封、()和组合式密封。
A、固定密封B、转运密封C、非接触式密封D、间院密封正确答案:C4.链传动的张紧轮应装在(A、靠近小轮的松边上B、靠近大轮的松边上C、靠近小轮的紧边上D、靠近大轮的紧边上正确答案:A5.在平面机构中若引入一个高副将引入()个约束。
A、4B、3C、1D、2正确答案:C6.自行车轮的轴是().A、转轴B、传动轴C、心轴D、阶梯轴正确答案:C7.角接触球轴承承受轴向载荷的能力,主要取决于( )A、轴承精度B、轴承宽度C、滚动体数目D、接触角大小正确答案:D8.斜齿轮有规定以()为标准值。
A、法面模数B、端面模数C、法面模数或端面模数D、以上都不是正确答案:A9.带轮是采用轮辐式、腹板式或实心式,主要取决于( )。
A、带轮的线速度B、带轮的直径C、传递的功率D、带的横截面尺寸正确答案:B10.渐开线上任意一点的法线必( ) 基圆.A、交于B、没关系 .C、切于正确答案:C11.在蜗杆传动中,通常( ) 为主动件。
A、蜗轮B、齿轮C、蜗杆或蜗轮都可以D、蜗杆正确答案:D12.普通平键联接的主要用途是使轴与轮毂之间().A、沿轴向固定并传递轴向力B、沿周向固定并传递转矩C、安装与拆卸方便D、沿轴向可作相对滑动并具有导向作用正确答案:B13.在蜗杆传动中,应用比较广泛的是(A、锥蜗杆B、环面蜗杆C、因柱蜗杆D、方形杆.正确答案:C14.同一螺栓组中螺栓的( ) 均应相同。
A、长度和材料B、直径和材料C、直径和长度D、直径、长度和材料正确答案:D15.凸轮机构中,主动件通常作()。
轮系考研真题
8.(山东轻工业学院 2010年) 在如图所示轮系中,已知运动由齿轮 1输入,其转速 n1=3549r/min。z1=36,z2=60,z3=23,z4 =49,z4’ =69,z5=31,z6=131,z7=94,z8=36,z9=167。 (1)分析轮系的组成,划分出各个单一的周转轮系和定轴轮系; (2)求 nH =?
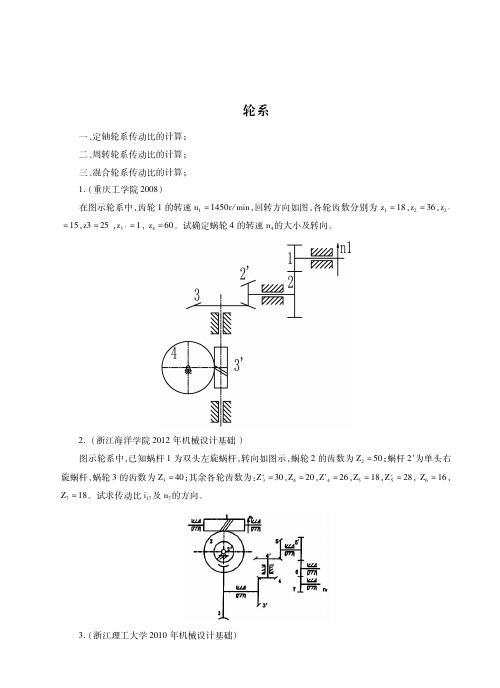
2.(浙江海洋学院 2012年机械设计基础 ) 图示轮系中,已知蜗杆 1为双头左旋蜗杆,转向如图示,蜗轮 2的齿数为 Z2=50;蜗杆 2′为单头右 旋蜗杆,蜗轮 3的齿数为 Z3=40;其余各轮齿数为:Z'3=30,Z4=20,Z′4=26,Z5=18,Z'5=28,Z6=16, Z7=18。试求传动比 i17及 n7的方向。
3.(浙江理工大学 2010年机械设计基础)
在图所示差动轮系中,已知各轮的齿数 z1=30,z2=50,z2′=20,z3=75,齿轮 1的转速为 200r/min (箭头向上),齿轮 3的转速为 50r/min(箭头向下),求行星架转速 nH的大小和方向?
4.(浙江理工大学 2010年机械设计基础) 在图所示的轮系中,已知,z1=z4=40,z2=z5=30,z3=z6=100,的大小和方向。
7.(昆明理工大学 2010年机械原理考研真题) 图示的轮系中,已知各轮齿数为 z1=32,z2=34,z2’ =36,z3=64,z4=32,z5=17,z6=24,若轴 A按 图示方向以 1250r/min的转速回转,轴 B按图示方向以 600r/min的转速回转,试确定轴 C的转速大小 和方向。
9.(深圳大学 2011年机械设计基础)
图示为传动装置。1为单头右旋蜗杆,2为蜗轮,其齿数 z2=100,其余各轮的齿数分别为 z2’ =z4, z6=z8,z4’ =80,z5=20,运动由蜗杆 1和齿轮 5同时输入,由齿轮 6输出,若 n1 =n5 =1000r/min,转向 如图所示,求齿轮 6输出的运动 n6的大小和方向。
朱明zhubob机械设计基础第7.8.9章轮系习题答案

第七章1.轮系的分类依据是什么?轮系在运转过程中各轮几何轴线在空间的相对位置关系是否变动2.怎样计算定轴轮系的传动比?如何确定从动轮的转向?定轴轮系的传动比等于组成轮系的各对齿轮传动比的连乘积,也等于从动轮齿数的连乘积与主动轮齿数的连乘积之比。
对于首末两轮的轴线相平行的轮系,其转向关系用正、负号表示。
还可用画箭头的方法来确定齿轮的转向3.定轴轮系和周转轮系的区别有哪些?定轴轮系是指在轮系运转过程中,各个齿轮的轴线相对于机架的位置都是固定的。
周转轮系是指在轮系运转过程中,其中至少有1个齿轮轴线的位置不固定,而是绕着其他齿轮的固定轴线回转4.怎样求混合轮系的传动比?分解混合轮系的关键是什么?如何划分?在计算复合轮系时,首要的问题是必须正确地将轮系中的各组成部分加以划分。
而正确划分的关键是要把其中的周转轮系部分找出来。
周转轮系的特点是具有行星轮和行星架,所以要找到轮系中的行星轮,然后找出行星架(行星架往往是由轮系中具有其他功用的构件所兼任)。
每一行星架,连同行星架上的行星轮和行星轮相啮合的太阳轮就组成一个基本的周转轮系,当周转轮系一一找出之后,剩下的便是定轴轮系部分了5.轮系的设计应从哪些方面考虑?考虑机构的外廓尺寸、效率、重量、成本等。
根据工作要求和使用场合合理地设计对应的轮系。
6.如图7-32所示为一蜗杆传动的定轴轮系,已知蜗杆转速n 1 = 750 r/min ,z 1 = 3,z 2 = 60,z 3 = 18,z 4 = 27,z 5 = 20,z 6 = 50。
试用画箭头的方法确定z 6的转向,并计算其转速。
答:齿轮方向向左,n6=75r/min7.如图7-33示为一大传动比的减速器,z 1 = 100,z 2 = 101,z 2 = 100,z 3 = 99。
求:输入件H 对输出件1的传动比i H1。
图7-32 蜗杆传动的定轴轮系 图7-33 减速器 答:100001 H i8.如图7-34所示为卷扬机传动示意图,悬挂重物G 的钢丝绳绕在鼓轮5上,鼓轮5与蜗轮4连接在一起。
机械原理-轮系集合例题

第5章轮系典型例题例1在图示轮系中,已知各轮齿数为:z1 =z1' = 40,z2=z4=30,z3=z5=100,试求传动比i1H。
解:齿轮1',4,5和系杆H组成了一个差动轮系。
齿轮1,2,3和齿轮5(充当系杆)组成了一个行星轮系。
在由齿轮1,2,3和齿轮5(系杆)组成的行星轮系中由于n 3=0,故有在由齿轮1',4,5和系杆H组成的差动轮系中即分析两个基本轮系的联系,可知n1= n1'(c)将(a),(c)两式代入(b),可得计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
例2 在图示轮系中,已知各轮齿数为:z 1 = 90,z 2 = 60,z 2' = 30,z 3 =30,z 3' = 24,z 4 = 18,z 5 = 60,z 5' = 36,z 6 = 32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min,转向如图所示。
试求输出轴H的转速n H的大小和方向。
解:齿轮3',4,5和系杆H组成了一个差动轮系齿轮1,2,2',3组成了一个定轴轮系,齿轮5',6组成了另一个定轴轮系。
对于齿轮3',4,5和系杆H组成的差动轮系,有即对于齿轮1,2,2',3组成的定轴轮系,有即对于齿轮5,6组成的定轴轮系,有即分析三个轮系之间的基本联系,有将该结果带入(a)式,可得化简整理后得计算结果为负,说明n H转向与n 5 相同,即n A,n B转向相反。
例3 在图示轮系中,已知齿轮1的转速为n 1 =1650 r/min,齿轮4的转速n4=1000r/min,所有齿轮都是标准齿轮,且z 2=z 5=z 6=20。
求各个齿轮中未知的齿轮齿数。
解:由齿轮1与齿轮3和齿轮6与齿轮4的同轴条件得齿轮1,2,3及系杆H1组成差动轮系;齿轮4,5,6及系杆H2组成行星轮系。
大学机械设计习题-滚动轴承习题及答案
!第十六章滚动轴承重要基本概念1.滚动体和内、外圈所受的载荷和应力在滚动轴承正常工作时,滚动体和内外圈滚道均受变载荷和变应力。
其中,滚动体和转动套圈承受周期性非稳定脉动循环的变载荷(变接触应力),固定套圈则承受稳定的脉动循环的变载荷(接触应力)。
2.滚动轴承的失效形式滚动轴承的主要失效形式(又称正常失效形式)是滚动体或内外圈滚道上发生疲劳点蚀。
当轴承转速很低(n≤10r/min)或只慢慢摆动,且静载荷很大时,其失效形式是滚动体或内外圈滚道表面发生塑性变形。
3.滚动轴承的设计准则对于正常转动工作的轴承,进行针对疲劳点蚀的寿命计算。
对于转速很低(n≤10r/min)或只慢慢摆动的轴承,进行静强度计算。
…4.滚动轴承的基本额定寿命基本额定寿命:一批相同的轴承在相同的条件下运转,当其中10%的轴承发生疲劳点蚀破坏(90%的轴承没有发生点蚀)时,轴承转过的总转数L10(单位为106转),或在一定转速下工作的小时数L10h (单位为小时)。
5.滚动轴承的基本额定动载荷C是指轴承寿命L10恰好为1(106转)时,轴承所能承受的载荷。
表示轴承的承载能力。
对于向心轴承:C 是纯径向载荷;对于推力轴承:C 是纯轴向载荷;在使用中要注意C 的3条含义:90%可靠度、基本额定寿命106 转、C 的方向。
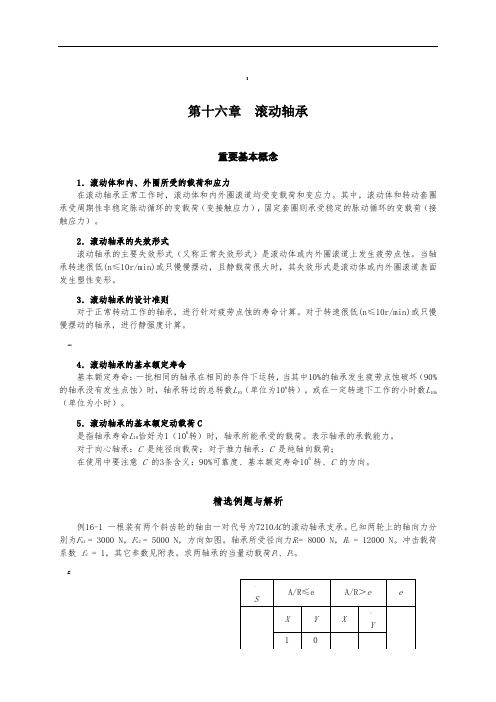
精选例题与解析例16-1 一根装有两个斜齿轮的轴由一对代号为7210AC的滚动轴承支承。
已知两轮上的轴向力分别为F a1 = 3000 N,F a2 = 5000 N,方向如图。
轴承所受径向力R1= 8000 N,R2 = 12000 N。
冲击载荷系数f d = 1,其它参数见附表。
求两轴承的当量动载荷P1、P2。
&例11-1图1解:1.求内部派生轴向力S 1、S 2的大小方向S 1 = = ×8000 = 5440 NS 2 = = ×12000 = 8160 N ,方向如图所示。
< 2.求外部轴向合力F AF A = F a2-F a1 = 5000-3000 = 2000 N ,方向与F a2的方向相同,如图所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮系
1、在图所示轮系中,已知各轮齿数为:。
试求传动动比。
2、在图所示轮系中,已知各轮齿数为:Z1=24,Z1'=30,Z2=95,Z3=89,Z3'=102,Z4=80,Z4'=40,Z5=17。
试求传动比i15。
3、在图所示的轮系中,已知各轮齿数为:Z1=90,Z2=60,z2'=30,Z3=30,Z3'=24,Z4=18,Z5=60,Z5'=36,Z6=32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min转向如图所示。
试求输出轴H的转速n H的大小和方向。
1、解:对于由齿轮1,2,3和齿轮5(系杆)所组成的周转轮系(行星轮系),有
由于,故有:
化简后可得:-----(a)
对于由齿轮1’,4,5和系杆H所组成的周转轮系(差动轮系),有
即-----(b)
分析两个基本轮系的联系,可知-----(c)
将(a)、(c)两式代人(b)式,可得
化简整理后可得
计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
2、解:对于由齿轮3',4-4',5和系杆H所组成的周转轮系,有:
即-------(a)
对于由齿轮1-1',2,3所组成的定轴轮系,有:
即:-------(b)
即:------(c)
分析定轴轮系部分与周转轮系部分的联系,可知
故有
-------(d)
-------(e)
将(d)(e)两式代人(a)式,得
整理后得:
计算结果i15为正,说明1轮与5轮转向相同。
3、解:
对于由齿轮3',4,5和系杆H组成的周转轮系(差动轮系),有
即:
对于由齿轮1,2,2',3所组成的定轴轮系,有
即:
对于由齿轮5’和6组成的定轴轮系,有
即
分析上述三个基本轮系之间的联系,有
将该结果代入(A)式,可得
化简整理后得:
计算结果为负,说明转向与相同,亦即与,转向相反。