二维最大熵阈值分割法
二维最大熵

二维最大熵二维最大熵是一种基于最大熵原理的图像分割方法,它利用了图像的灰度信息和邻域的空间相关信息,通过构造二维直方图来选择最佳的分割阈值。
二维最大熵不仅反映了灰度分布信息,还反映了邻域平均灰度信息,因此在图像信噪比较低时,二维最大熵法明显优于一维最大熵法。
最大熵原理最大熵原理是统计学习的一般原理,它指出,当我们需要对一个随机事件的概率分布进行预测时,我们的预测应当满足全部已知的条件,而对未知的情况不要做任何主观假设。
换句话说,我们应该选择使得信息熵最大的概率分布作为最优的预测模型。
信息熵是一种衡量随机变量不确定性的度量,它定义为:H(X)=−∑xP(x)log P(x)其中X是一个离散随机变量,P(x)是X取值为x的概率。
信息熵越大,表示X的不确定性越大。
按照最大熵原理,我们应该选择使得H(X)最大的概率分布P(x)作为最优模型。
当然,在选择模型时,还要满足一些已知的约束条件,例如期望值、方差等。
这样,我们就可以将最大熵模型转化为一个约束优化问题,利用拉格朗日乘子法或者其他优化算法求解。
二维直方图二维直方图是一种描述图像中两个相关变量之间分布关系的直方图。
在二维最大熵方法中,我们通常使用点灰度和区域灰度均值作为两个相关变量。
点灰度指的是图像中每个像素的灰度值,区域灰度均值指的是每个像素邻域内(例如3×3或5×5)所有像素灰度值的平均值。
这样,每个像素都对应一个点灰度-区域灰度均值对(f(x,y),g(x,y)),其中f(x,y)是点灰度,g(x,y)是区域灰度均值。
如果图像有L个灰度级(例如L=256),那么这样的数据对有L×L种可能的取值。
设n ij为图像中点灰度为i及其区域灰度均值为j的像素点数,p ij为点灰度-区域灰度均值对(i,j)发生的概率,则p ij=n ij N×N其中N×N是图像的总像素数。
则{p ij,i,j=0,1,…,L−1}就是该图像关于点灰度-区域灰度均值的二维直方图。
二维直方图θ-划分Tsallis熵阈值分割算法
Ab ta t s r c : I iw o e o vo sw o g s g n ain i o n v e ft b iu r n e me tt n c mmo l s d 2 D h s g a e i n dv s n a d te n n u i es l yo h o ny u e - it r m rg o iii n h o — n v r ai f o o t
W U — u n ZHANG i k n Yiq a Jn—ua g
( oeeo fr a o c n eadT cnlg , a n nvri Cl g fnom t nSi c n ehooy N migU i sy l I i e e t
o eo a t s n s o a t s a n i gu2 0 1 , hn ) f rn ui dA t n u c ,N mig a s 1 0 6 C ia A ca r i Jn
V0 . No 8 I26. . Au 2 0 g. 01
21 00年 8月
二 维 直 方 图 0 划 分 T al 熵 阈值 分 割算 法 一 sls i
吴 一全 张金 矿
( 南京 航 空 航 天 大 学 信 息科 学 与技 术 学院 ,江 苏 南 京 2 0 1 ) 10 6
摘
事实上这只是一种特殊情况可以推广到采用法显然的取值直接决定加权系数a的大小改变线与灰度级轴成任意角的直线按灰度级与邻域平着直方图区域的划分影响最佳阈值的选取由此导致均灰度级的加权和进行阈值分割称之为区域划最终分割结果图像的内部均匀性边界形状准确性及分
第2 6卷
第 8期
信 号 处 理
S GNA ROC S I I LP E S NG
二维最大熵阈值分割法
二维最大熵阈值分割算法[引用]杜峰,施文康,邓勇等:《一种快速红外图像分割方法》1. 二维最大熵阈值分割熵是平均信息量的表征。
二维最大熵法是基于图像二维直方图。
图像二维直方图定义如下:NM n P j i j i ⨯=,,其中N M ⨯表示图像大小,j i n ,表示图像灰度值为i ,邻域灰度平均值为j 的像素个数。
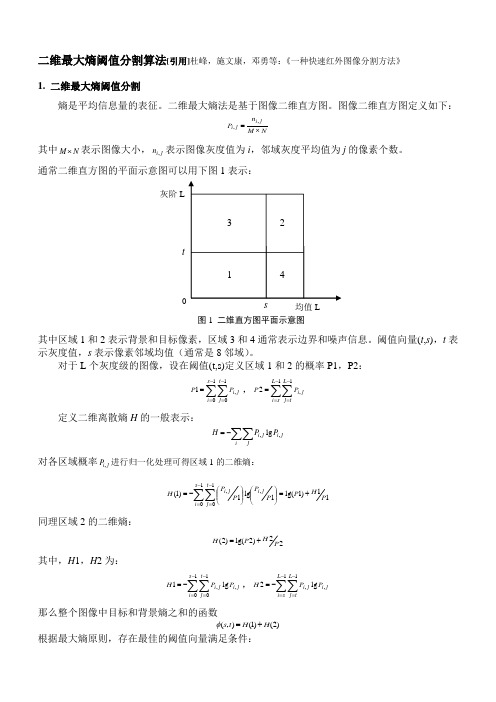
通常二维直方图的平面示意图可以用下图1表示:其中区域1和2表示背景和目标像素,区域3和4通常表示边界和噪声信息。
阈值向量(t ,s ),t 表示灰度值,s 表示像素邻域均值(通常是8邻域)。
对于L 个灰度级的图像,设在阈值(t,s)定义区域1和2的概率P1,P2:∑∑-=-==101,1s i t j ji PP ,∑∑-=-==11,2L s i L tj j i P P定义二维离散熵H 的一般表示:∑∑-=ijji ji P PH ,,lg对各区域概率j i P ,进行归一化处理可得区域1的二维熵:11)1lg(1lg 1)1(101,,P H P P P P P H s i t j j i ji +=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛-=∑∑-=-= 同理区域2的二维熵:22)2lg()2(P H P H +=其中,H 1,H 2为:∑∑-=-=-=101,,lg 1s i t j ji ji P PH ,∑∑-=-=-=11,,lg 2L s i L tj j i j i P P H那么整个图像中目标和背景熵之和的函数)2()1(),(H H t s +=φ根据最大熵原则,存在最佳的阈值向量满足条件:图1 二维直方图平面示意图灰阶)},(max{),(t s t s φφ=**图2显示了一幅图像的二维直方图说明了背景和目标的主要分布情况,其中图2(b)横坐标表示邻域的均值,纵坐标表示灰度值分布:2. 微粒群寻优算法(PSO )PSO 最早由Kenredy 和Eberhart 于1995年提出。
基于熵的图像二值化算法设计-二维最大熵分割
1设计目的与要求1.1 设计目的(1)熟悉和掌握MATLAB程序设计方法。
(2)学习和掌握MATLAB图像处理工具箱。
(2)了解图像分割和图像二值化的原理。
(3)掌握图像二值化技术阈值的选取。
(4)将原彩色图像变为二值化后的图像,通过二维最大熵图像分割法对图像进行分割达到预期目的。
1.2 设计要求(1)了解图像变换的意义和手段。
(2)熟悉最大熵和二值化的基本性质。
(3)通过本实验掌握利用MATLAB编程实现数字图像处理。
(4)理解图像分割的原理,了解其应用,掌握最大熵和二值化分割的方法。
2 设计方案2.1 图像二值化图像二值化是数字图像处理技术中的一项基本技术,二值化图像的显示与打印十分方便,存储与传输也非常容易,在目标识别、图像分析、文本增强、字符识别等领域得到广泛应用。
图像二值化是将灰度图像转化为只有黑白两类像素的图像,大多采用阈值化算法处理。
在不同的应用中,阈值的选取决定着图像特。
征信息的保留。
因此,图像二值化技术的关键在于如何选取阈值。
2.2 最大熵原理最大熵原理:最大熵原理是在1957 年由E.T.Jaynes 提出的,其主要思想是,在只掌握关于未知分布的部分知识时,应该选取符合这些知识但熵值最大的概率分布。
因为在这种情况下,符合已知知识的概率分布可能不止一个。
我们知道,熵定义的实际上是一个随机变量的不确定性,熵最大的时候,说明随机变量最不确定,换句话说,也就是随机变量最随机,对其行为做准确预测最困难。
图像分割中最大熵的引入:在图像分割中若假定以灰度级T 分割图像,则图像中低于灰度级T 的像素点构成目标物体,高于灰度级T 的像素点构成背景那么各个灰度级在图像分割后的两区域中的概率如下:O :ti N N (0<=i<=t) (3.2.1)B :ti N N N - (t+1<=i<=255) (3.2.2)其中Ni 为图像中灰度级为i 的像素点个数,Nt 为灰度级从0~t 的像素点总和,N 为图像总像素点,t 为假定灰度阈值T 。
二维直方图区域斜分的最大熵阈值分割算法
维直方图区域划分成图 1 ( c) 所示的 4个矩形区域.
假设图像的暗 (亮 ) 像素属于目标 (背景 ) , 则区域 0
和目标对应 ,区域 1和背景对应 ,而区域 2和 3则表
示边缘和噪声. 计算时仅考虑区域 0和 1, 而假设区
域 2和 3的概率近似为零. 最后采用与灰度级轴垂直
的直线将灰度级小于 t的部分分成目标 ,大于 t的则
A BSTRAC T
The obvious w rong segmentation is pointed out in the existing two2dimensional histogram vertical segm entation method. A two2dimensional histogram oblique segm entation method is p roposed. Then the formula and its fast recursive algorithm of the maximum Shannon entropy thresholding are deduced based on the two2dim ensional histogram oblique segm entation. Finally, the threshold images and the p rocessing tim e are given in the experimental results and analysis. The results are compared w ith those of the original m axim um Shannon entropy algorithm and its fast algorithm s based on the two2dim ensional histogram vertical segmentation. The experimental results show that the p roposed method makes the inner part uniform and the edge accurate in the threshold image, and it has a better anti2noise p roperty. The p rocessing tim e of the fast recursive algorithm of the p roposed method is about 2% of that of the original two2dim ensional maximum Shannon entropy algorithm , and it is less than one third of that of two fast recursive algorithm s of the maximum Shannon entropy thresholding based on the two2dim ensional histogram vertical segmentation.
二维最大熵阈值分割法
%%%%%%%%%%%%%%%%%%% 二维最大熵阈值分割法%%%%%%%%%%%%%%%%%%[filename,pathname]=uigetfile;img=imread(strcat(pathname,filename));figure(1);subplot(221);imshow(img);subplot(222);imhist(img(:,1));subplot(223);imhist(img(:,2));subplot(224);imhist(img(:,3));%%%%%%%%%%%%% 这个地方出现了一个问题就是为什么MidValue=img(i,j-1,1)+img(i-1,j,1)+img(i%%%%%%%%%%%%% +1,j,1)+img(i,j+1,1)最大值为256,难道是默认的一个BYTE类型吗???p=zeros(256,256);[m,n,k]=size(img);for i=2:m-1for j=2:n-1MidValue=img(i,j-1,1)/4+img(i-1,j,1)/4+img(i+1,j,1)/4+img(i,j+1,1)/4;MidValue=round(MidValue);p(img(i,j,1)+1,MidValue+1)=p(img(i,j,1)+1,MidValue+1)+1;end;end;%图像的四个角,只有2领域的点儿p(img(1,1,1)+1,round((img(1,2,1)/2+img(2,1,1)/2))+1)=p(img(1,1,1)+1,round((img(1,2,1)/2+img( 2,1,1)/2))+1)+1;p(img(1,n,1)+1,round((img(1,n-1,1)/2+img(2,n,1)/2))+1)=p(img(1,n,1)+1,round((img(1,n-1,1)/2+i mg(2,n,1)/2))+1)+1;p(img(m,1,1)+1,round((img(m-1,1,1)/2+img(m,2,1)/2))+1)=p(img(m,1,1)+1,round((img(m-1,1,1)/ 2+img(m,2,1)/2))+1)+1;p(img(m,n,1)+1,round((img(m,n-1,1)/2+img(m-1,n,1)/2))+1)=p(img(m,n,1)+1,round((img(m,n-1, 1)/2+img(m-1,n,1)/2))+1)+1;%图像周围的一圈,只有3领域的点儿for j=2:n-1MidValue=img(1,j-1,1)/3+img(1,j+1,1)/3+img(2,j,1)/3;MidValue=round(MidV alue);p(img(1,j,1)+1,MidValue+1)= p(img(1,j,1)+1,MidV alue+1,1)+1;end;for j=2:n-1MidValue=img(m,j-1,1)/3+img(m,j+1,1)/3+img(m-1,j,1)/3;MidValue=round(MidV alue);p(img(m,j,1)+1,MidValue+1)= p(img(m,j,1)+1,MidValue+1)+1;end;for i=2:m-1MidValue=img(i-1,1,1)/3+img(i+1,1,1)/3+img(i,2,1)/3;MidValue=round(MidV alue);p(img(i,1,1)+1,MidValue+1)= p(img(i,1,1)+1,MidV alue+1)+1;end;for i=2:m-1MidValue=img(i-1,n,1)/3+img(i+1,n,1)/3+img(i,n-1,1)/3;MidValue=round(MidV alue);p(img(i,n,1)+1,MidValue+1)= p(img(i,n,1)+1,MidValue+1)+1;end;p=p/(m*n);%%%%%%%%%%%% 忽略噪音的影响%%%%%%%%%%%%%%%%%%%%%%%%%%%pa=0;ha=0;hn=0;s=10;t=10;Qst=0;temp_t=10;temp_s=10;for i=1:256for j=1:256if(p(i,j)>0)hn=hn+log2(p(i,j))*p(i,j)*(-1);end;end;end;for t=10:256for s=10:256ha=0;pa=0;for i=1:tfor j=1:spa=pa+p(i,j);end;end;for i=1:tfor j=1:sif(p(i,j)>0)ha=ha+log2(p(i,j))*p(i,j)*(-1);end;end;end;if(pa>0&&1-pa>0)if(log2(pa*(1-pa))+ha/pa+(hn-ha)/(1-pa)>Qst)Qst=log2(pa*(1-pa))+ha/pa+(hn-ha)/(1-pa);temp_t=t;temp_s=s;end;end;end;end;for i=1:mfor j=1:nif(img(i,j,1)>temp_s)img(i,j,1)=255;img(i,j,2)=255;img(i,j,3)=255;elseimg(i,j,1)=0;img(i,j,2)=0;img(i,j,3)=0;end;end;end;figure(2);imshow(img);。
基于分形理论的改进型二维最大熵红外图像分割算法
文 章 编 号 : 17—7521)802-5 6288 ( 20—07 0 0
基 于 分 形 理 论 的 改 进 型 二 维 最 大 熵 红 外 图 像 分 割 算 法
陈 洪 科 杨 晓玲
( 闽南 理 工 学 院 电子 与 电气 工 程 系 ,福 建 石 狮 3 2 0 ) 6 7 0
a d c n tu t isji tpr b bl y d srb i n On t a a i,t wodi e so a a i m n r p n o sr c t on o a it itiuto . i h tb ss het — m n in lm x mu e t o y
二维直线型Renyi熵阈值分割方法
j , 中c c i 其 i 是
L一1 L—l
素和为 0 这种假设在很多情况下不合适。 , 为此文献 [] 9 提出了作过 ( ,) St 的曲线 , i ) . , 将二维区域分 (
区域 的 曲线 型 阈值 方 式 , 用垂 直 于对 角 线 的直 线作
为阈值选取的基础 , 实现了从“ 点对” 阈值到直线阈 值 的转 变 。文 献 [ ] 出 的 二 维 R n i 也存 在上 8提 ey 熵
述的忽 略对 角线 元 素 的 问题 , 因此 本 文 提 出 了一 种
二 维 直 线 型 Rey 熵 阈 值 分 割方 法 。同 时 , ni 由于二 维 方法 的 运 算 量 太 大 , 文 还 给 出 了 二 维 直 线 型 本
维直方 图定义在 一个 ( 一1 L )X( —1 大小 的正方 L ) 形区域上 。 直方 图中任意一点 的值定 义为 , 它表 示
2 二 维 直 线 型 R n i 阈值 法 ey 熵
在上 述 二 维直 方 图 的划 分 时 , 设非 对 角 线元 假
二元组(,) 发生 的频率 ,
21 0 0年 5月 第1 5卷 第 3 期
西 安 邮 电 学 院 学 报 J URN O ALO IA FX ’ NUNI E STYO O TSAN V RI FP S DTE E OMMUNIA ONS LC C TI
Ma 0 0 y2 1 Vo.5No3 11 .
二 维 直 线 型 Re y 熵 阈 值 分 割 方 法 ni
基 金项 目: 陕西 省教育厅 专项科研计划资助项 目( 号 :9K7 1 编 0J 2 ) 作者 简介 : 雷 博 (9 1 , , 1 8 一)女 西安邮电学院通信与信 息工程学院讲师 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二维最大熵阈值分割算法[引用]杜峰,施文康,邓勇等:《一种快速红外图像分割方法》
1. 二维最大熵阈值分割
熵是平均信息量的表征。
二维最大熵法是基于图像二维直方图。
图像二维直方图定义如下:
N
M n P j i j i ⨯=
,,
其中N M ⨯表示图像大小,j i n ,表示图像灰度值为i ,邻域灰度平均值为j 的像素个数。
通常二维直方图的平面示意图可以用下图1表示:
其中区域1和2表示背景和目标像素,区域3和4通常表示边界和噪声信息。
阈值向量(t ,s ),t 表示灰度值,s 表示像素邻域均值(通常是8邻域)。
对于L 个灰度级的图像,设在阈值(t,s)定义区域1和2的概率P1,P2:
∑∑-=-==
101
,1s i t j j
i P
P ,∑∑-=-==11
,2L s i L t
j j i P P
定义二维离散熵H 的一般表示:
∑∑-
=i
j
j
i j
i P P
H ,,lg
对各区域概率j i P ,进行归一化处理可得区域1的二维熵:
11)1lg(1lg 1)1(101
,,P H P P P P P H s i t j j i j
i +=⎪⎪⎭
⎫ ⎝⎛⎪⎪⎭⎫ ⎝
⎛-
=∑∑-=-= 同理区域2的二维熵:
2
2
)2lg()2(P H P H +=
其中,H 1,H 2为:
∑∑-=-=-
=101
,,lg 1s i t j j
i j
i P P
H ,∑∑-=-=-=11
,,lg 2L s i L t
j j i j i P P H
那么整个图像中目标和背景熵之和的函数
)2()1(),(H H t s +=φ
根据最大熵原则,存在最佳的阈值向量满足条件:
图1 二维直方图平面示意图
灰阶
)},(max{),(t s t s φφ=**
图2显示了一幅图像的二维直方图说明了背景和目标的主要分布情况,其中图2(b)横坐标表示邻域的均值,纵坐标表示灰度值分布:
2. 微粒群寻优算法(PSO )
PSO 最早由Kenredy 和Eberhart 于1995年提出。
PSO 把优化问题的潜在解都当做解空间的粒子,所有粒子都有一个适应值(适应值由被优化函数决定),每个粒子还有一个速度决定它们飞翔的方向和距离。
然后粒子们就追随当前的最优粒子在解空间中搜索,初始化为一群随机粒子(随机解)然后通过迭代找到最优解。
最后在每一次迭代中粒子通过跟踪两个极值来更新自己,第一个就是粒子本身所找到的最优解,称为个体极值;另一个极值是整个种群目前找到的最优解,称为全局极值。
本文的目标是要找到满足最大熵原则的最优解()**t s ,,下面以图文方式解释PSO 算法步骤原理:
第1步:第1次迭代→如图3在解空间有效范围内())255,0(rand );255,0(rand ∈∈t s 选定m 个随机解(即粒子)并初始化,如:),(11t s 、),(22t s …),(i i t s …),(m m t s 其中()**t s ,为最优解位置向量。
① 计算每个粒子的适应度,即目标函数的熵),(i i t s φ,m i ...2,1=。
均值
灰度值
*s
*t
),(33t s
),(m m t s
),(j i t s
),(11t s
),(22t s
图3 随机初始化的粒子群位置
图2 目标与背景的二维直方图分布情况
(a) 原始红外图 (b) 二维直方图的平面分布
(c) 二维直方图的空间分布
② 计算当前粒子群的全局最优解(熵)及其对应位置:
}...2,1),,(max{m i t s QS i i ==φ
}...2,1),,{(optimal _m i t s QP YOU i i ==
③ 计算n 次迭代后每个粒子自身找到的最优解(熵)及其位置:
}i ...2,1;...2,1),,(max{_e D n m i t s S YOU n i n i i ===φ;}i ...2,1;...2,1),,{(optimal _e D n m i t s P YOU n i n i i ===
其中n 表示迭代次数,Die 表示最大迭代次数。
首次迭代(n =1)时单个粒子最优值即为其初始化时的随机值。
第2步:第n 次迭代→如图4更新粒子速度向量和位置,粒子运动服从如下方程:
)ˆ(22)(111n i
n n n i n i n n i n i P S r c P S r c V w V -⋅⋅+-⋅⋅+⋅=+ n i n i n i P V P +=++11
其中n r 1、n r 2为随机数,服从(0,1)之间的均分布,1c 、2c 为学习因子,通常221==c c ,w 是惯性系数。
i P 表示第i 个粒子的位置向量(即),(i i t s ),i V 表示第i 个粒子的运动速度,i S 表示第i 个
粒子自身的最优位置。
i
S ˆ表示整个粒子群全局最优位置。
3. 实验结果
如图5显示了二维最大熵阈值分割的结果。
其中图2(b)也就是图5(a)对应的二维直方图分布。
如何在图2(b)找到最优的阈值向量()**t s ,使
(a) 原始红外图 图5 二维最大熵阈值分割结果
(b) 阈值分割后的二值化图
图4 粒子群的运动速度和更新位置
均值
灰度值0
*t
),(33t s
),(m m t s
),(j i t s
),(11t s
),(22t s
得目标图像熵最大,一个最直接的方法就是穷尽搜索法。
穷尽搜索法无目的性而且计算量大,需要进行256×256次计算。
本文采用PSO 算法搜索最佳阈值,在实验中,令粒子群为15个,迭代次数30,c 1=c 2=2,w =0.35。
图6显示了粒子群在每次迭代中达到的局部最优熵。
完成整个迭代寻优过程粒子群找到的全局最优阈值向量为(105,103)全局最优熵1484.5)103,105(=φ。
从图6可以看出:第14代的粒子群局部最优熵就达到了5.1484,说明了迭代到第14代就至少有一个粒子寻找到了全局最优位置。
从第16代到30代之间,粒子群局部最优熵一直保持5.1484,说明此时粒子群中至少且总有一个粒子到达了全局最优位置。
因此整个迭代过程中,寻找到全局最优位置PSO 的计算量为16×15次。
图 7 首次迭代时初始化的随机粒子分布
第1次迭代
0501001502002503000
100
200300
s
t
图6 粒子群在各次迭代中的局部最优熵
图7显示了在首次迭代时初始化的15个随机粒子位置分布图,其中横坐标表示均值(s ),纵坐标表示灰度值(t )。
图8显示了在第14次迭代后粒子群的位置分布以及各个粒子的位置坐标),(i i t s 。
从图8可以看出第6个粒子首次寻找到全局最优位置(105,103)。
图8 第14次迭代粒子群的位置分布及其位置坐标值
图9显示了第30次迭代后粒子群的分布情况。
从图中可以看出此时大部分粒子都收敛于全局最优位置。
图9 第30次迭代粒子群的位置分布及其位置坐标值
总之,PSO 算法中的粒子群从初始随机位置经过各次迭代过程遵照粒子运动方程向着全局最优位置靠拢。